# Emplois étudiants
# PROJETS A REALISER
- Faire une signalétique pour la salle découpe (trie des chutes) :
[https://wiki.fablab.sorbonne-universite.fr/BookStack/books/emplois-etudiants/page/signaletique-tri-dans-la-salle-des-decoupeuses-laser](https://wiki.fablab.sorbonne-universite.fr/BookStack/books/emplois-etudiants/page/signaletique-tri-dans-la-salle-des-decoupeuses-laser)
- Faire signalétiques pour l'espace Biologie-Chimie (faire valider par Steve ou Allan)
-
- - "Blouse obligatoire" : ([BLOUSE OBLIGATOIRE.svg](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/693)) (30/04) à faire valider = **attendre commande matériaux**
- ==> (17/05) fichier validé par l'espace biologie ([blouse\_final\_final.svg](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/744) <== modifié pour faire 10 cm de largeur
- ==> TroLase 0.8 mm utilisé Attention il gondole et brule, ==> faire de plus petit panneau (10 cm au lieu de 15cm) ou utiliser un matériau plus épais
- - "Nourriture interdite" (fichier déjà existant) = **fait**
- - "Nettoyer les paillasses" = **fait** lien wiki: [https://wiki.fablab.sorbonne-universite.fr/BookStack/books/emplois-etudiants/page/plaque-signaletique-nettoyage-des-paillasses ](https://wiki.fablab.sorbonne-universite.fr/BookStack/books/emplois-etudiants/page/plaque-signaletique-nettoyage-des-paillasses)
- QR CODE = phytoton
- Ne rien jeter dans l'évier
- Ranger les vis
- Penser à système pour faciliter les vis ([https://makerworld.com/en/models/452445#profileId-359670](https://makerworld.com/en/models/452445#profileId-359670))
- Mettre a jour inventaire sur Fabtrack
- Système d'arrosage automatique pour les plantes
- Rangement espace de stockage (contacter les personnes, démonter les projets, etc.)
- Finir growbox
- Test de Produit (espace bio)
- Mettre a jour les logiciels sur tous les ordinateurs
- Installer Orca slicer
# Espace biologie_chimie
# Espace Biologie-Chimie FabLab
Par Cassandra d'ALMEIDA, emploi-étudiante
Le 31/10/2023
Inventaire des enzymes du congélateur (salle 206) bac 2.
Pour le prochain shift : choisir une enzyme et la tester via PCR.
J'aimerai bien tester l'enzyme suivante : Master Mix DreamTaq Green PCR.
Le protocole est le suivant (en anglais) : [https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&cad=rja&uact=8&ved=2ahUKEwi2kpSC1KCCAxV-TqQEHZZDCG8QFnoECBoQAQ&url=https%3A%2F%2Fassets.thermofisher.com%2FTFS-Assets%2FLSG%2Fmanuals%2FMAN0012704\_DreamTaq\_Green\_PCR\_MasterMix\_K1081\_UG.pdf&usg=AOvVaw14u3clStyiVbXH4mUEZaun&opi=89978449](https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&cad=rja&uact=8&ved=2ahUKEwi2kpSC1KCCAxV-TqQEHZZDCG8QFnoECBoQAQ&url=https%3A%2F%2Fassets.thermofisher.com%2FTFS-Assets%2FLSG%2Fmanuals%2FMAN0012704_DreamTaq_Green_PCR_MasterMix_K1081_UG.pdf&usg=AOvVaw14u3clStyiVbXH4mUEZaun&opi=89978449)
27/11/23 par Cassandre Touzé
Autre enzyme à tester : Taq'Ozyme HS Mix ( référence OZYA006-200XL) -> le mix contient la taq polymérase ( démarrage à chaud) , les dNTP et du Mgcl (tampon). Il faudra ajouter les amorces et la matrice d'ADN d'intérêt.
Voici la fiche technique: [http://images.bio.ozyme.fr/Web/OZYME/{f6b7ee36-d063-43dc-abad-0bc9822fe780}\_ozy-taq-ozyme-hot-start-mix-ozya006-1000-fiche-technique.pdf](http://images.bio.ozyme.fr/Web/OZYME/%7Bf6b7ee36-d063-43dc-abad-0bc9822fe780%7D_ozy-taq-ozyme-hot-start-mix-ozya006-1000-fiche-technique.pdf)
# New Page
# Signalétique 2024 - Espace Biologie Chimie
Panneau d'affichage des horaires pour l'espace Biologie-Chimie (fichier SVG) :
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-02/horaires-signaletique-fablab-biochimie-2024.svg)
N'oubliez pas de documenter vos projets sur le Wiki (fichier SVG) :
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-02/documenter-19-2-24.svg)
Ouvert/Fermé/Réservé (fichier SVG) :
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-02/ouvert-ferme-reserve-fablab.svg)
Horaires du FabLab :
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-02/horaires-du-fablab-bio-chimie.svg)
Ne rien jeter dans l'évier :
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-05/tuto-vfp1.svg)
Younan Jean, Coiffard Abel-14/05/2024
Maryam Hamdy - 28/05/2024
Signalétique pour demander aux utilisateurs de porter leur blouse ( à coller)
On a commencé à faire le design, vous trouverez en pièce jointe le début, logo blouse l'idée est de faire quelque chose de rectangulaire ou de carré
# Dosage H2O2
Dans le but de calculer la concentration de deux solutions H2O2 disponibles à l'espace Biologie-Chimie, on a utilisé la loi de Beer Lambert, sachant que l'eau oxygénée absorbe à 240nm (E240 = 39,4 M-1 cm-1). L'équation qui décrit la loi est la suivante:
**A=e\*l\*C**
A: absorbance
e: coefficient d'extinction molaire
l: longueur de cuve = 1cm
C: concentration en mol/L
Ayant choisi 100 comme facteur de dilution, on a prélévé 0,1mL de H2O2, complétant avec 9,9mL de H2O, pour un volume finale de 10mL. Pour la première solution H2O2, on a trouvé, en utilisant le spectrophotomètre, une absorbance A=3,634. On calcule donc une concentration C=9,2M. Pour la deuxième solution H2O2, on a trouvé une absorbance A=3,465, pour trouver donc une concentration C=8,79M. On constate que la concentration de la deuxième solution a diminué par rapport au dernier dosage, lors duquel la concentration a été calculé à 11M.
On a marqué les concentrations calculées aux bouteilles, pour toute future utilisation.
Test des mesures :
Nous avons effectués plusieurs mesures sur le spectromètre UV ( biochrom). En utilisant comme blanc de l'eau distillé, nous avons déposé dans une cuve de quartz du peroxyde d'hydrogène et nous avons obtenue une Absorbance de 2.45 pour des dilutions de 1/10 et 1/100 sachant que la concentration de peroxyde d'hydrogène est de 35%. Cependant, nous avons observé un décalage du spectre d'absorption vers la gauche entre les dilutions 1/1000 et 1/100 (domaine d'absorbance de 200 à 500 nm).
Pour la dilution 1/1000 nous avons obtenue une absorbance de 0.45 et pour 1/500 on a obtenue une absorbance de 1.02.
Pour la partie calculatoire, en utilisant la valeur d'absorption 1/1000 nous obtenons une concentration de 11.42 M au lieu de 8.79 M (valeur écrite sur la bouteille). Cela peut être dû au manque de précisons de la dilution mais on a le même ordre de grandeur donc c'est logique.
On a mesuré l'absorbance de la bouteille de H202 (35%) avec le spectrophotomètre Biochrome portable pour des dilutions au 1/500 et 1/1000. Pour la dilution au 1/500 on a obtenu une absorbance de 0,649. On a obtenu une concentration de 8,23 M, ce qui était plus proche de la valeur de la bouteille (8,79 M). Pour la dilution 1/1000, on a obtenu une absorbance de 0,285, ce qui correspond à une concentration de 7,23 M.
Les dilutions 1/10 et 1/100 ont montré que le peroxyde d'02 n'est pas de bonne qualité. En effet, nous ne connaissons pas la date d'ouverture du flacon. Dans ce sens, l'absorbance lue au spectrophotomètre est de 0 avec 1/100 et de valeur négative avec 1/10.
# Projet Etagère
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-04/NUyimage.png)
Ce projet consiste dans un premier temps à la modélisation sur un logiciel CAO 3D d'une étagère, puis à sa fabrication en bois.
Les dimensions de la face la plus grande (le dos) prévu est de 4m x 2m. Celle des côté est de 2m x 0.4m. Elles ont une épaisseur de 6mm.
Les plaques constituant les étages ont une dimension de 3,995m x 3.5m, et une épaisseur de 10mm.
**Les dimensions seront surement revus pour l'adapter à l'utilisation prévu et l'espace disponible.**
Voici les fichiers:
![]()![]()[projet etagere.FCStd (pour l'assemblage complet sur FreeCAD) ](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/655)
[corps étagère.stl (pour la pièce extérieur qui structure l'étagère)](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/656)
[etagère etagère.stl (pour la pièce intérieur qui compose chaque étage)](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/657)
#### Conseils pour le bricolage:
- Pour de grandes dimensions, comme il s'agit de bois, on peut facilement couper à la scie à main ou électrique sans passer par la fabrication numérique.
- Pour les des petites dimensions, on peut redimensionner les longueurs, largeurs des pièces. Ensuite on peut l'exporter en format. svg en passant par le mode Draft. Et l'ouvrir ensuite sur le logiciel de la machine.
- Comme il s'agit de bois, on peut facilement visser et utiliser des équerres pour assembler le tout
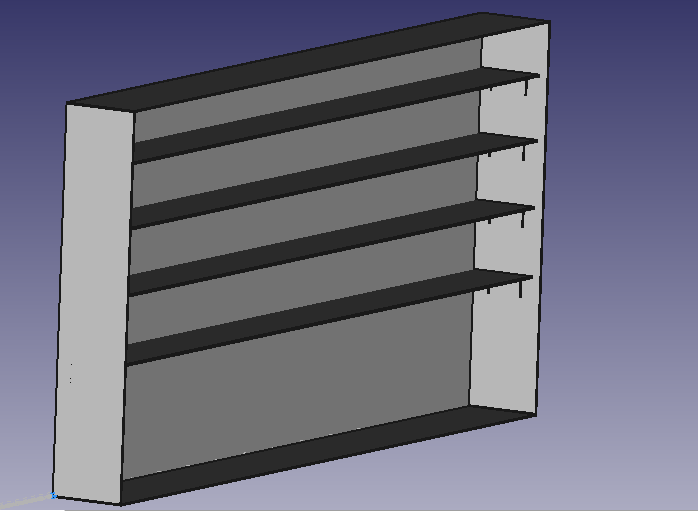
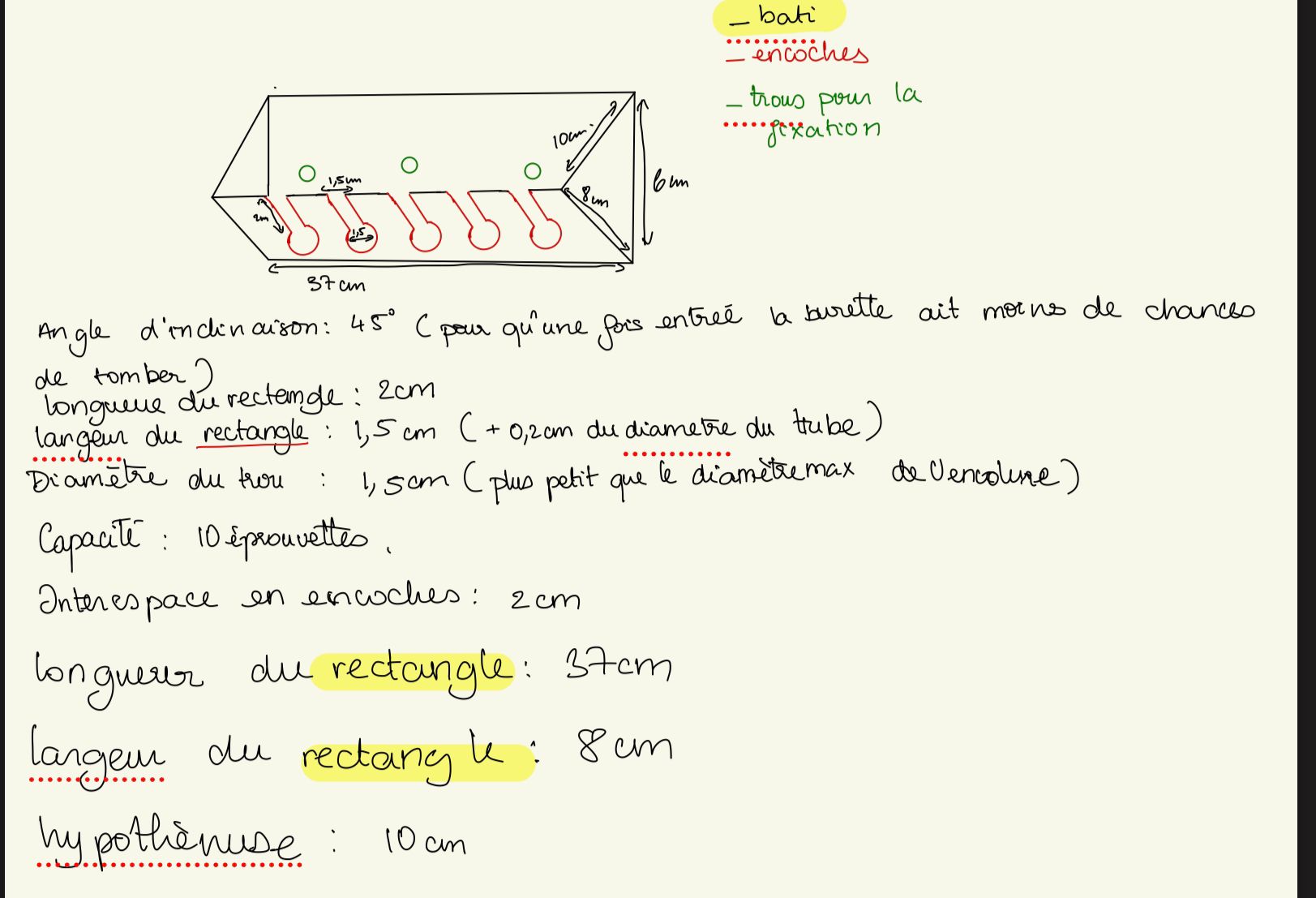
# Etagères pour burettes gradué
## **Etagères pour burettes gradué**
**Ce projet a pour but de concevoir des étagères pour ranger les burettes graduées de l’espace biologie chimie.**
**[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-12/etagere.jpg)**
**Conception de modele en 2D et utilisation de la plieuse**
**materiel : plexiglas**
**diamètre des trous pour les vis : 3,5 mm**
**Salimata Ndongo et Alexa Raynal**
# 3devo Filament Maker One - Mise en fonctionnement/Réparation
Alexa Raynal Cobo
Link pour la documentation: [https://support.3devo.com/filament-maker-user-manual](https://support.3devo.com/filament-maker-user-manual)
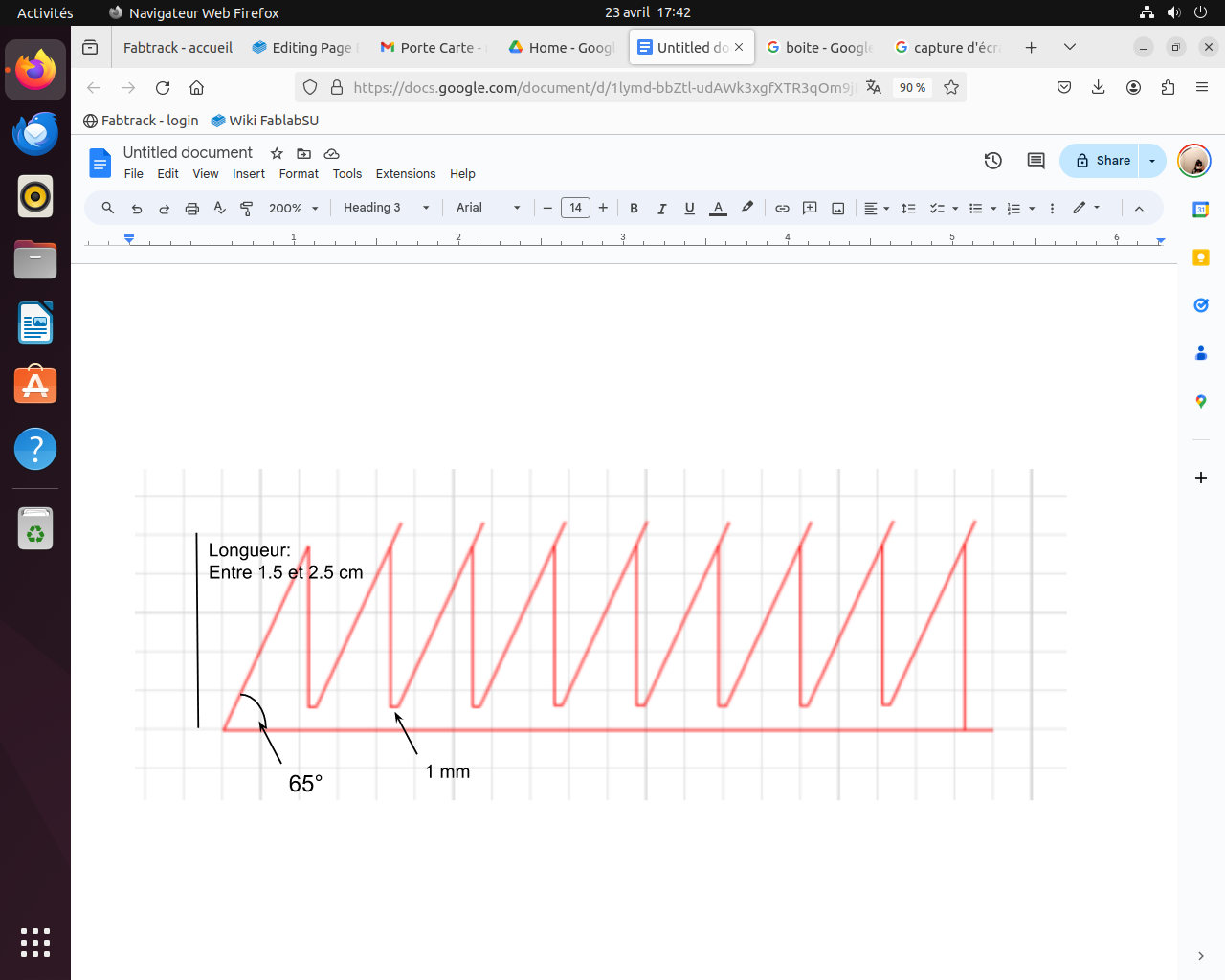
Température que j'ai mis sur la machine 160, 170, 180, 190
ça restait stable au moment de sortir le filament de nettoyage à 1.5 mais quand j'ai commencé le processus de scooling le diamètre s'est déstabilisé à 1.5 et après de manip de vitesse, température j'ai pas réussi à le remettre.
Dernier teste effectué: avec du PLA transparent mais il semble coincée, j'ai pas eu le temps de trouver une solution. Faudra retester si le PLA sors ou trouver la source du problème de blocage
#### Procédure de purge
- Utiliser un produit de purge (RevoClean) adapté au matériau à purger (dans le cas du PLA, RevoClean MT).
- Vider au maximum possible l'entonnoir de chargement.
- Orienter les ventilateurs vers l'extérieur de la machine.
- Installer un carton de protection en dessous de l'extrudeur (il servira de réceptacle pour le filament purgé).
- Installer un petit bout de carton (ou autre matériau opaque) pour cacher le capteur de matériau dans l'entonnoir .
- Ajouter une petite quantité de matériau de purge (environ 2-3 cm au-dessus de la vis).
- Lancer l'extrusion (mode automatique) avec des paramètres de température légèrement supérieurs (10-20°) à ceux du matériau à purger (normalement, un gradient de température croissant de l'entrée vers la sortie avec pas plus de 10° d'écart entre chaque résistance de chauffe), une vitesse de ventilation nulle et une vitesse de rotation faible (3-4 rpm).
- Durant la chauffe, des petites gouttes de matériau devraient tomber, vérifier que celles-ci ne sont pas brulées (couleur marron-noir). Si c'est le cas et si l'extrudeur ne sort pas de matériau après mise en rotation de la vis, il peut être nécessaire d'augmenter la température moyenne de chauffe de 20-30°.
- La vis devrait se mettre en rotation quelques instants après que le corps de chauffe ait atteint les températures demandées. Lorsque l'entonnoir de remplissage est vide ou presque vide et si aucun problème n'apparait, le remplir avec 200-300g de produit de purge. Il est possible d'augmenter légèrement la vitesse de rotation pour accélérer cette étape (6-8 rpm).
- Laisser la machine extruder la totalité du produit de purge et, à partir du moment où l'entonnoir est vide chronomètrera 2min 30 puis arrêter la machine.
- La procédure est alors terminée et on peut introduire un nouveau matériau. Penser à retirer les deux cartons, réorienter correctement les ventilateurs et rétablir les paramètres adaptés au matériau à extruder.
Mise à jour du 27/11/2025
Après une procédure de purge qui a relativement bien fonctionné, nous avons trouvé sur le manuel de fonctionnement de la machine qu'une étape supplémentaire était nécessaire pour permettre une bonne transition entre purge et la PLA
"Additionally, PLA is really bad at pushing MT out so we use HDPE as a transitioning material. This is due to the viscosity differences of each material at these extrusion temperatures and explained briefly in the paragraph at this article's start.
**MT >> PLA** will most likely result in minor clogging and burnt PLA.
**MT >> HDPE >> PLA** will result in a smooth transition across all stages. " [https://support.3devo.com/standard-purge](https://support.3devo.com/standard-purge)
Comme nous n'avons pas de HDPE, nous avons lancé d'extrusion du PLA mais il s'est coincée donc nous avons arrêté la machine. Etant donné que la dernière extrusion(2 semaines avant) a donné du PLA brulé , nous en avons déduis que le HDPE était nécessaire pour avoir un PLA de meilleur qualité .
# 3devo AirID Dryer
Link pour la documentation: [Airid-Dryer-Manual.pdf ](https://support.3devo.com/hubfs/Support%20Platform/downloadable%20PDF/Airid-Dryer-Manual.pdf)
**Pour le séchage du PLA:**
Il est recommandé de régler la température entre 40°C et 50°C pendant environ 4h à 6h.
**Paramètres testés avec du PLA :**
Drying temperatur: 45°C
Mixer speed: 8rpm
Drying duration: 1h00
Type of material: Medium (Flokers)
Amount of material: Hopper 25% full (~1 liter)
# Liste machine labo
# Espace prototypage
Projets et missions
# Panneau
# Panneaux informatifs impression 3D
#### **Panneau paramètre hauteur de couche**
Choisir un modèle à imprimer 4 fois avec des paramètres d'impression différents, **avec du filament blanc (ou autre couleur claire)**, car la plaque sera noire.
Noter le temps mis pour référence afin d'annoter les modèles sur le panneau finalisée:
Modèle choisi : casque de Stormtrooper, lien vers fichier 3D: [(lien)](https://www.thingiverse.com/thing:6468638/apps)
- Paramètres de l'impression communes:
- densité de remplissage: 15%
- motif de remplissage: rectiligne
- échelle réduite à 15% par rapport au fichier de départ
Temps en fonction de la hauteur de la couche:
- hauteur de couche 0.4mm
- temps de l'impression:
- hauteur de couche 0.3mm
- temps de l'impression:
- hauteur de couche 0.2mm
- temps de l'impression: 1h16
- hauteur de couche 0.1mm
- temps de l'impression :2h40
# Montage et entretien des servantes
# Projet Signalétique 2024 FabLab
**L'idée de ce projet est de créer des panneaux de signalétique sur les tables de travail du FabLab afin d'assurer un environnement de travail propre et sûr.**
Les panneaux indiqueront clairement l'interdiction de manger et d'utiliser des machines sur les tables de travail, contribuant ainsi à maintenir l'ordre, la propreté et la sécurité dans l'espace du FabLab. Ces directives visuelles aideront à sensibiliser les utilisateurs et à préserver la qualité des équipements.²
> Nous commençons tout d'abord par dessiner le modèle du projet sur le logiciel Inkscape.
[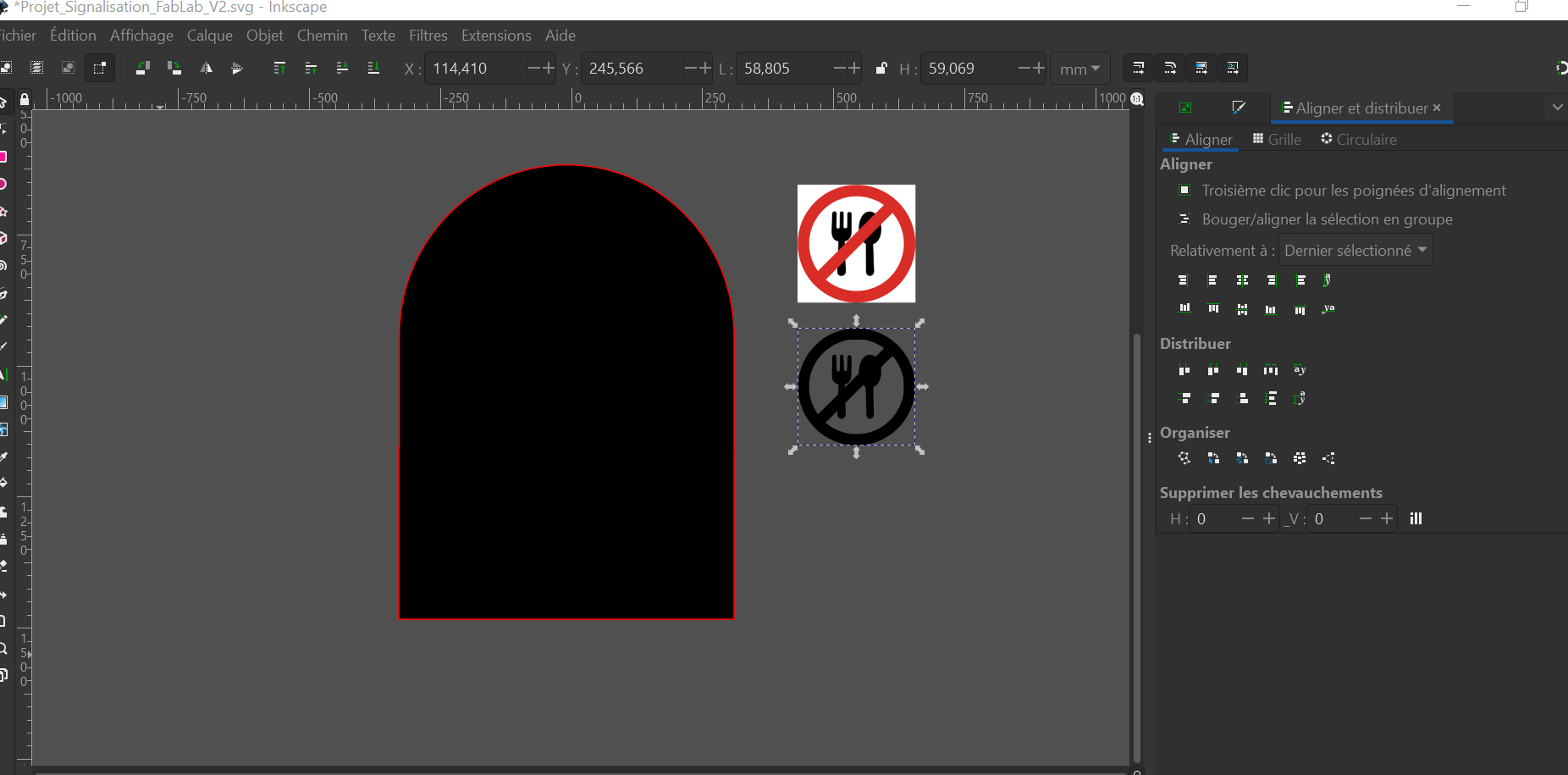](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-01/capture-decran-2024-01-12-151007.png)
> Le panneau sera directement disposé sur les tables. La taille de l'objet ci-dessus fait 17cm de largeur et 23cm de hauteur. L'idée est de mettre une plaque de 6mm de plexiglass sur une plaque de 6mm de MDF 6mm (les deux matériaux plus larges). C'est sur la plaque de plexiglass que seront découpé les différents signes et c'est sur la plaque de bois MFR 6MM que devra être collé la plaque de plexiglass.
**Les signaux interdit de manger et interdit d'utiliser des outils feront 7cm de hauteur et de largeur**
[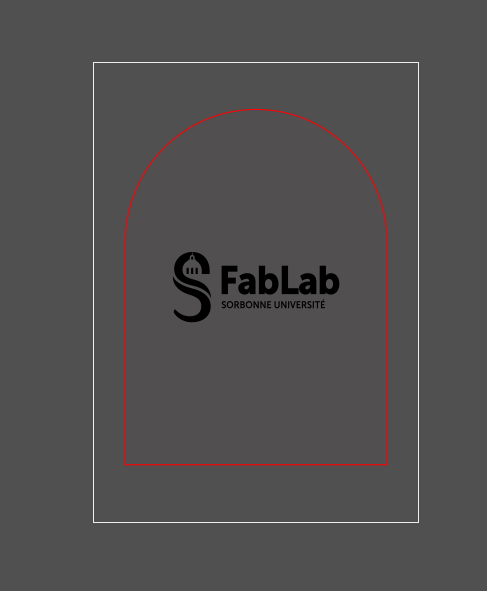](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-01/capture-decran-2024-01-12-170409.png)
Voici la face arrière du panneau. Le logo du FabLab sera gravé sur la surface en MDF 6mm.
**12/02/2024:**
**Layla BARBAR et Mikhail KOGAN**
Après avoir découpé les plaques informatives pour la connexion avec wifi avec des plaques TroLase 1.6 mm, il nous restait 2 parties des plaques que nous avons décidé d'utiliser pour créer les logos d'interdiction de manger et d'utiliser les outils : gravure des logos et découpe sous forme d'un cercle tout autour avec la découpeuse laser. L'idée est de les accrocher à l'aide de fils sur la barre métallique en dessus de la table.
# Plaque infomative "Pour vous connecter au wifi"
> **A faire : une plaque informative afin de permettre aux utilisateurs de se connecter au wifi du fablab**
#### Objectifs :
Projet donné par les FABmanagers afin de faciliter la connexion à internet et inciter les utilisateur·ices à l'utiliser.
***La plaque ( TroLase 0.8mm) contiendra un QR code qui simplifiera la connexion suivit du nom du réseau et du mot de passe !***
#### Machines utilisées
\- Trotec Speedy 360
#### Construction
*- Faire le modèle sur le logiciel Inkscape (Fichier svg dans la page du WIKI. C'est sur la gauche)*
*- S'assurer que le QR code fonctionne*
#### Journal de Bord :
**16/01/2024 Miro Von der Borch et Angela Fournel-Meria** : Nous avons commencé à éditer le fichier seulement inkscape refusant de coopérer, nous avons du renoncer à finir. Actuellement il manque l'étape "3. Connexion avec SSO identifiant SU" et il faut changer la police de l'étape 4 pour qu'elle corresponde à celle de SU (voir les autres zones de texte). Il faudra aussi vectoriser le tout avant de lancer la découpe. Nous avons aussi ajouté un petit cadre aux bords arrondis autour de la plaque. Bon courage avec inkscape :).
**19/01/2024 Mbarik KARIHILA et Cassandre TOUZE :** nous avons repris le fichier précédent et cette fois, Inkscape fonctionnait! Donc nous l'avons finalisé et lancé les gravures et découpe sur le matériau Trolase 0.8mm avec la Trotec 360.
On a eu deux problèmes, la découpe ne s'est pas faite correctement et le QRcode ne fonctionne pas. Nous avons donc rectifié le QRCode en faisant un nouveau fichier Inkscape. Mais nous n'avons eu le temps de découper et graver ce nouveau QRcode mais le fichier svg est présent dans "Attachements" avec la nouvelle version (normalement fonctionnelle) de la plaque. Bon courage :)
**12/02/2024**
**Layla BARBAR et MAMMERI Salah Eddine**
Nous avons repris le fichier précédent : le QR code permettait juste l'accès à la page de connexion mais celle-ci ne marchait pas ainsi nous avons mis à jour le fichier en supprimant le code. Nous avons lancez la découpe avec la plaque TroLase 1.6mm et ça a bien marché ainsi nous avons découpé 2 plaques.
**19/02/2024**
**MAMMERI Salah Eddine et PHAM Fivos**
On a repris le dernier modèle pour faire des affiches pour l'espace Biologie-Chimie, Nous avons lancez la découpe avec la plaque TroLase 1.6mm et ça a bien marché ainsi nous avons découpé 1 plaque.
# Signalétique plaque "Tutoriel" et plaque "Matériel"
#### **Plaque ''Tutoriel''**
**Dans le but d'enrichir la signalétique du FabLab et de pousser les utilisateurs à visiter le Wiki, notamment les tutoriels qui y sont présents, nous avons réalisé les modèles de panneaux suivants, tous comprenant un QR Code et un message textuel:**
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-02/tuto-vsem.svg)
(version SALAH EDDINE MAMMERI)
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-02/tuto-vfp1.svg)
(version FIVOS PHAM)
[tuto-vfp2.svg](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/546)
(version FIVOS PHAM, modifiée par Anne-Aymone PERRET)
Test (15/02/24) : Nous avons découpé une première découpe pour avoir une idée des dimensions et vérifier le bon fonctionnement du QR code. Une fois ce test réalisé, nous avons lancé plusieurs découpe sur une plaque TroLase vert/blanc en utilisant le fichier modifié. Nous avons réalisé 5 découpes que nous avons réparties dans les différentes salles du FabLab ainsi qu'à l'accueil. [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-02/20240229-144519.jpg)
29/04/2024 MAMMERI Salah Eddine et KOGAN Mikhail
On a lancé la découpe d'une plaque supplémentaire pour l'espace Biologie-Chimie avec du Trolase vert 0.9mm.
Le Code QR fonctionne.
# Panneau "Stockage de Projets"
Panneau "Stockage de Projets" (fichier SVG) :
# Methode inventaire
## INVENTAIRE
1. Identifier la référence (si présente) et vérifier l'utilisation de l'objet sur [https://www.systeal.com](https://www.systeal.com) (pas toujours possible)
2. prendre une photo, nommer la photo comme l'objet, la mettre dans le dossier "photos inventaire" sur le bureau de l'ordinateur "Jane Goodall"
3. demander a Flora de se connecter sur [https://wiki.fablab.sorbonne-universite.fr/fabtrack](https://wiki.fablab.sorbonne-universite.fr/fabtrack) (pour avoir accès a l’onglet "administration")
4. choisir "administration", puis "inventaire consommables", et remplir la page avec les informations sur l'objet (dans la limite du possible), en précisant le lieu de stockage.
5. Si jamais vous ne pouvez pas identifier l'objet, le mettre dans la pile "A identifier (par Stephane)"
Progrès:
- le meuble gris avec les composants en électronique est terminé
- le tiroir w91 et w93 du meuble w9 de Mécanique sont également terminés. Il reste donc le tiroir w92 et peut être le w94 a finir.
# Démonstration largeur de couche d'impression
Bonjour, voici un modèle d'impression pour montrer la différence entre les différentes épaisseurs de couches lors de l'impression d'un modèle. Pour cela, j'ai décider d'imprimer un petit mouton (cf pièce jointe). Maintenant, il suffit juste de l'imprimer en plusieurs exemplaires avec différentes épaisseurs de couches.
[HAPPY\_SHEEP\_FOR\_PRINT.obj](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/645)
[mouton\_à\_imprimer.idea](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/646)
SEBAI Taha, le 26/03/2024
Cassandre Touzé 28/03/24
Nous avons commencé à imprimer un premier mouton avec une hauteur de couche de 0.3mm, et avec du PLA vert. Le mouton est celui du document "[mouton\_à\_imprimer.idea](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/646)".
Puisque l'impression n'a pas fonctionné et que le fichier pose problème, nous avons choisi un nouveau mouton (présent dans les fichiers joints sous le nom Sheep.STL). Cette fois ci le mouton est imprimé avec une hauteur de couche de 0.1mm toujours avec du PLA Vert.
Cassandre Touze 25/04/24
Nous avons décider de changer de modèle et nous avons choisi le modèle "gummibear\_lowpoly\_1000"
Une première impression a été faite avec du PLA gris pour une hauteur de couche de 0,4mm. Voici la photo:
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-04/hDc1714061683276.jpg)
Une autre impression a été lancé avec une hauteur de couche de 0,3mm
MAMMERI Salah Eddine et KOGAN Mikhail 29/04/2024
On a repris le dernier modèle "gummibear\_lowpoly\_1000" et on a lancé une impression avec une hauteur de couche de 0.2mm
Durée estimée 1h56min.
Resultat OK
SEBAI Taha,Younan Jean 13/05/2024
Impression du modèle "gummibear\_lowpoly\_1000" avec une hauteur de couche de 0.1mm
Durée : 4h36
Résultat :
# Boîte
#### Contexte
Les utilisateurs du Fablab ont pour habitude d'emprunter différents matériaux. Pour un emprunt de courte durée (ex. un ordinateur portable), ils doivent présenter sa carte étudiant aux médiateurs. Il pourra la récupérer une fois les produits rendus.
#### Objectifs
On a pour objectif de créer une boîte "porte carte" pour le magasin. Cet objet permettra le rangement ordonné des cartes tout en facilitant le dépôt et retrait des cartes.
*Ajouter au moins une image de votre projet*
#### Matériel
- chute d'une planche de CP peuplier 3mm (dimensions 300\*600mm)
- colle à bois
- boîte déjà existante
#### Machines utilisées
Trotec Speedy 100
#### Construction
Une boîte de dimension : 4,7x10,5x7,1 cm a préalablement été fabriquée. Nous y avons ajouté deux supports en forme de "dents de requin" pour pouvoir positionner les cartes inclinées, individuellement visibles et organisées.
# Signalétique Tri dans la salle des découpeuses laser
Angela Fournel-Meria 29/04/24
Nous avons effectué aujourd'hui le tri des chutes dans la salle des découpeuses laser et nous avons séparé les chutes utilisables en deux catégories : cartons & bois d'un côté, autres matériaux de l'autre (PLA, métal etc...). Il pourriat être utile de créer une signalétique pour que le rangement des chutes reste correct le plus longtemps possible.
Mikhail Kogan 31/05/2024
Plaques signalétique:
- [Acrylique.svg](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/834)
- [TroLase.svg](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/836)
- [Peuplier 6mm.svg](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/838)
- [Peuplier 3mm.svg](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/835)
- [MDF 6mm.svg](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/833)
- [MDF 3mm.svg](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/832)
- [PMMA 6mm.svg](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/837)
- [PMMA 3mm.svg](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/831)
# Idées de projet d'améliorations
- Etagère pour exposer les impressions
- Caméras connecter à un site web pour surveiller les impressions
-
# Inventaire reserve + note pour Flora
Miro 17/05, Andrew 21/05
Reste à faire :
Sur FabTrack
- CP 5mm : clarifier souple et medium (photo ?)
Fait :
- Acrylique couleur : Nomenclature des noms : Type du matériel+Couleur
- note pour **Flora** : entré à supprimer -> [https://docs.google.com/spreadsheets/d/1YHeIBj8SAN1TGsxdziQeTIRXxqqk4mtQrqgL8z2eGEM/edit?usp=sharing](https://docs.google.com/spreadsheets/d/1YHeIBj8SAN1TGsxdziQeTIRXxqqk4mtQrqgL8z2eGEM/edit?usp=sharing)
# Signalétique Espace Bio / Chimie
- Blouse obligatoire : en cours
- Nourriture interdite : fait
- étagère de présentation (50x20cm 6mm)
- QR Notice wiki : Phytotron,
- "Ne rien jeter dans l'évier"
- nettoyer les paillasses
# Plaque signalétique nettoyage des paillasses
Le fichier:
[Nettoyer les paillasses.svg](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/774)
Découpé dans Trolase Laminate Reverse 1,5 mm (bleu)
2 ont été déjà réalisé en attente du matériel supplémentaire.
# QR Notice wiki : Phytotron
Le fichier :
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-05/qr-code-phytotron.svg)
- Réalisé sur la plaque PMMA bleue, 6 mm
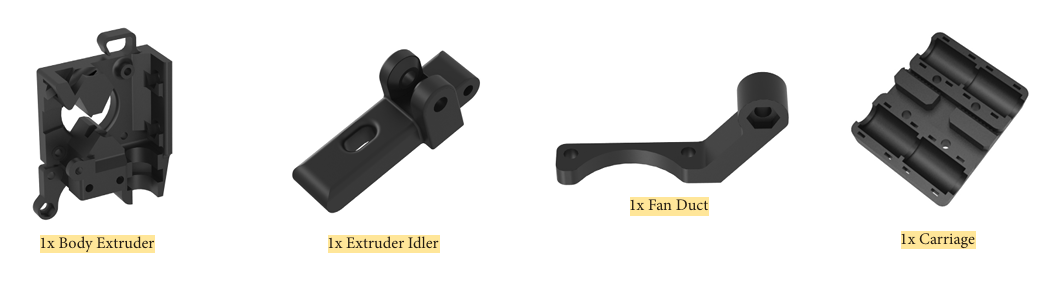
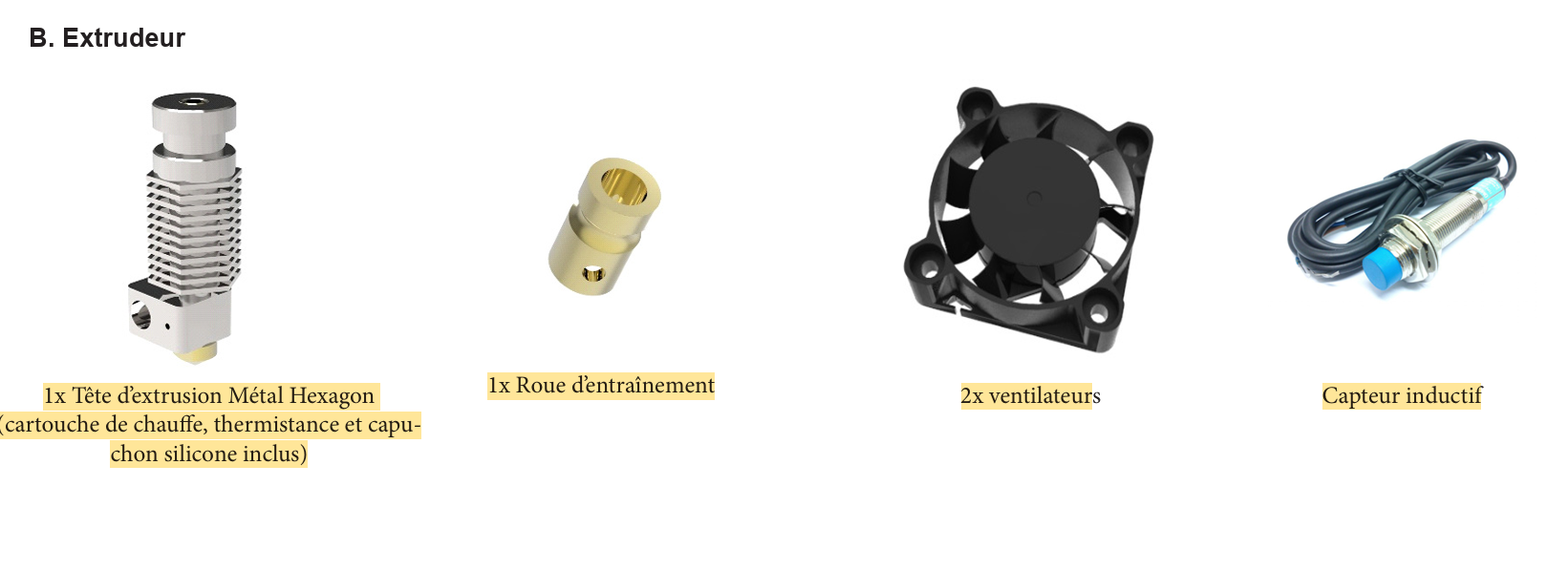
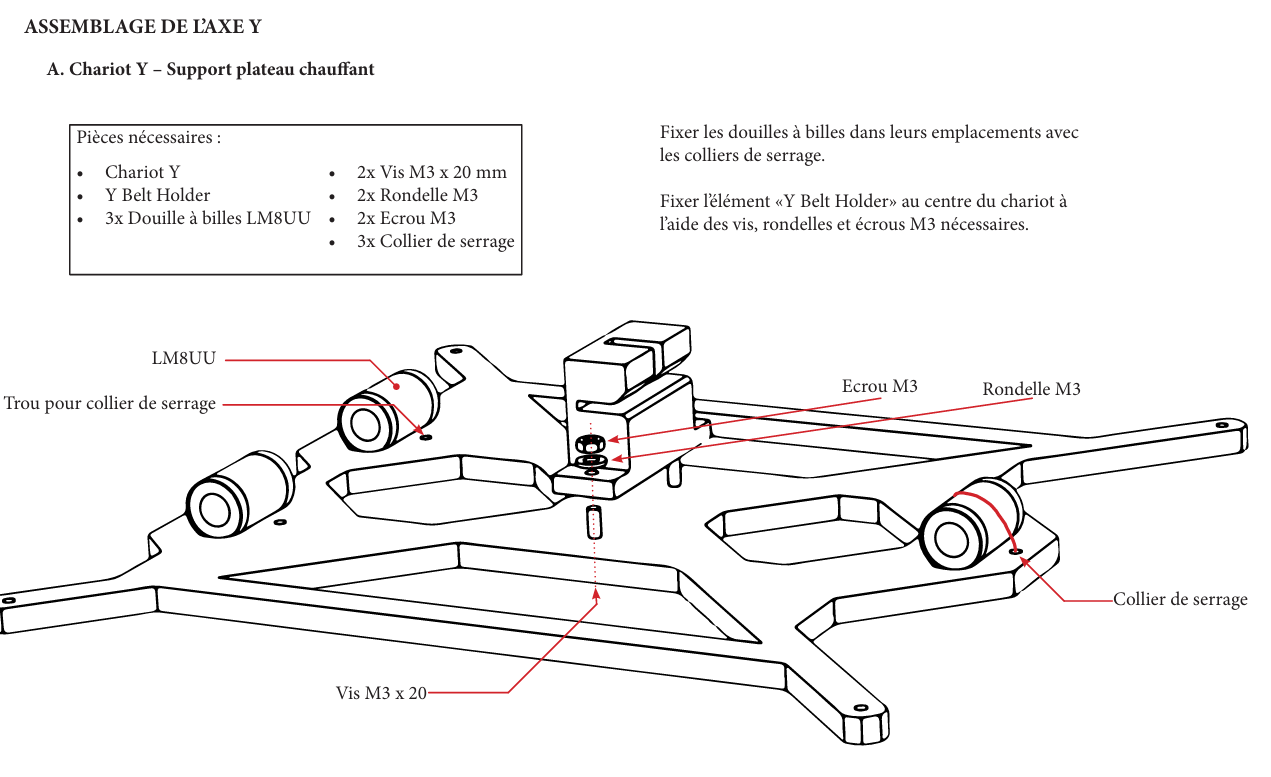
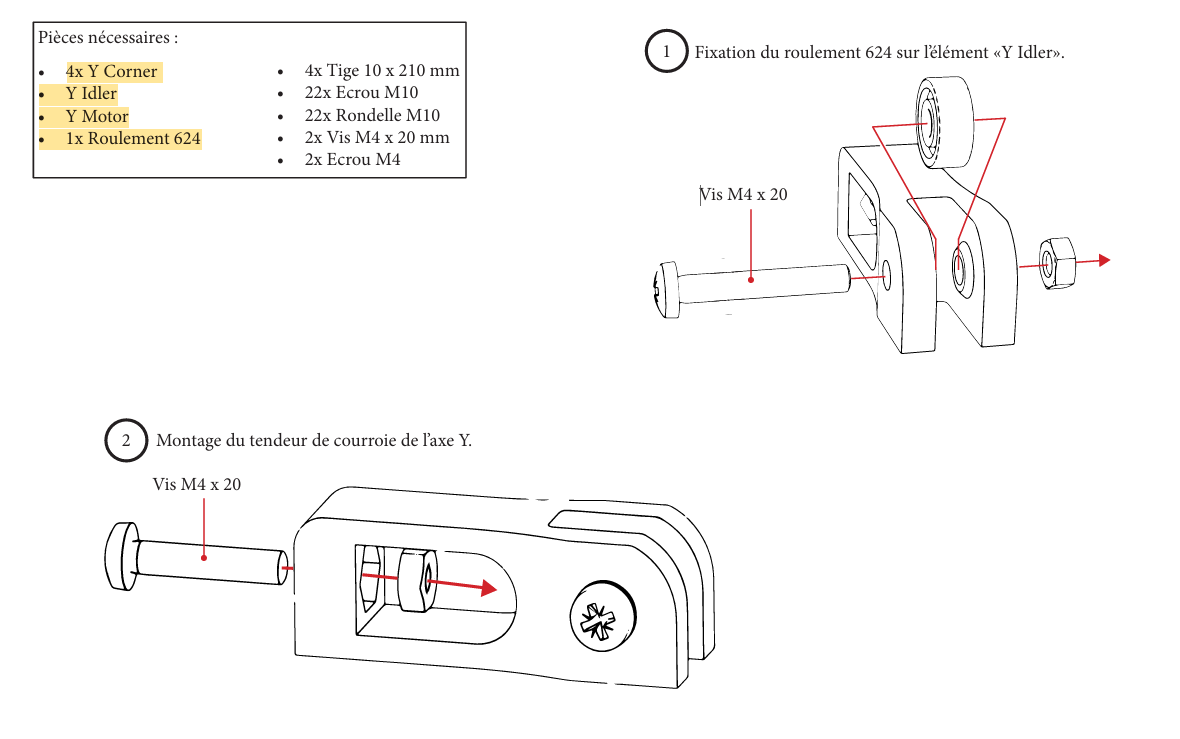
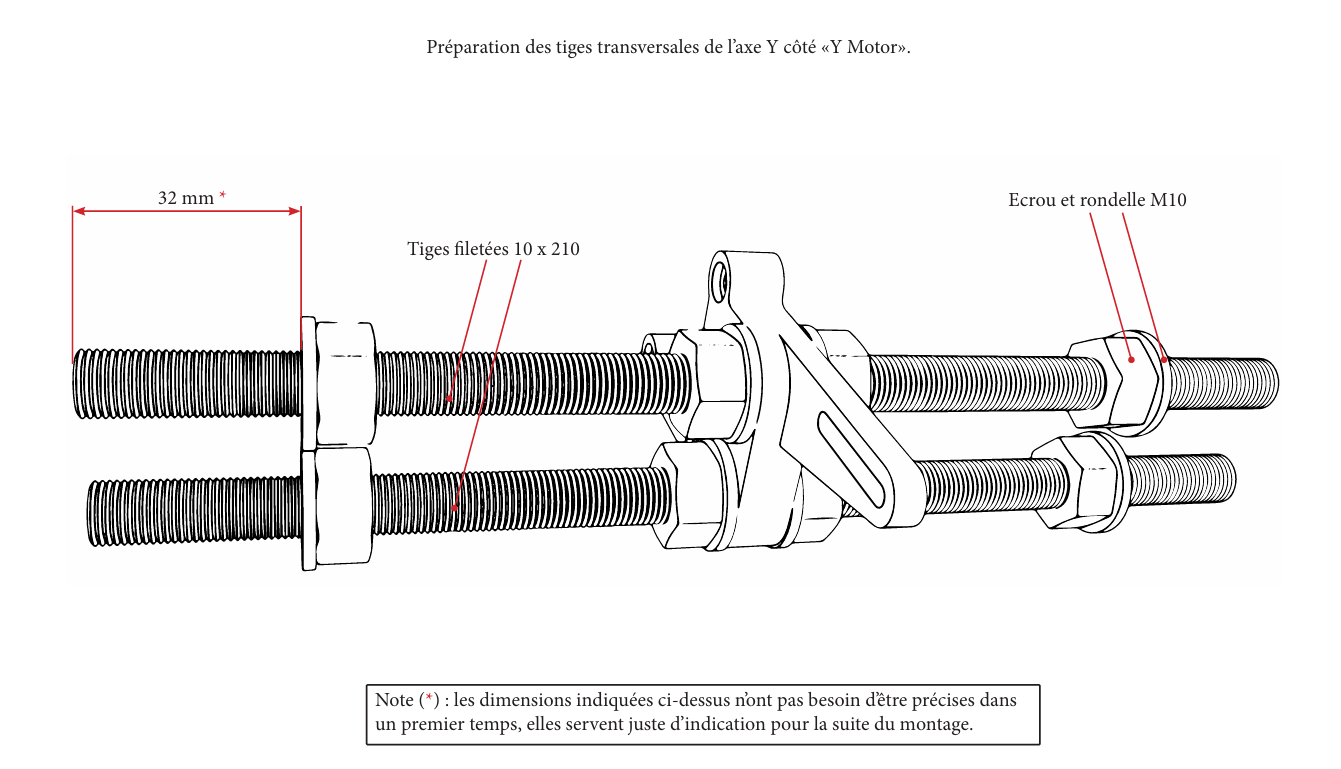
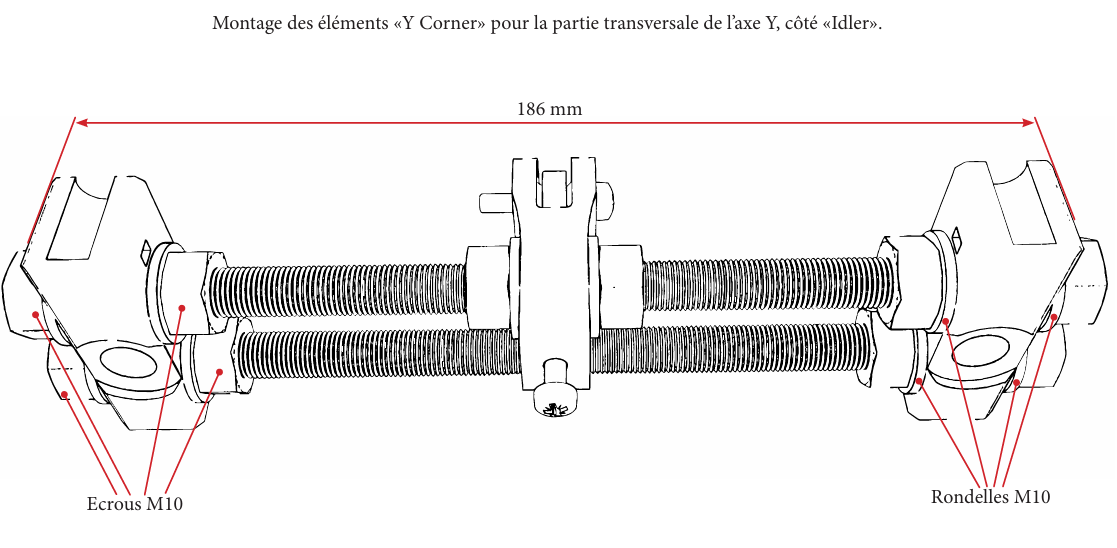
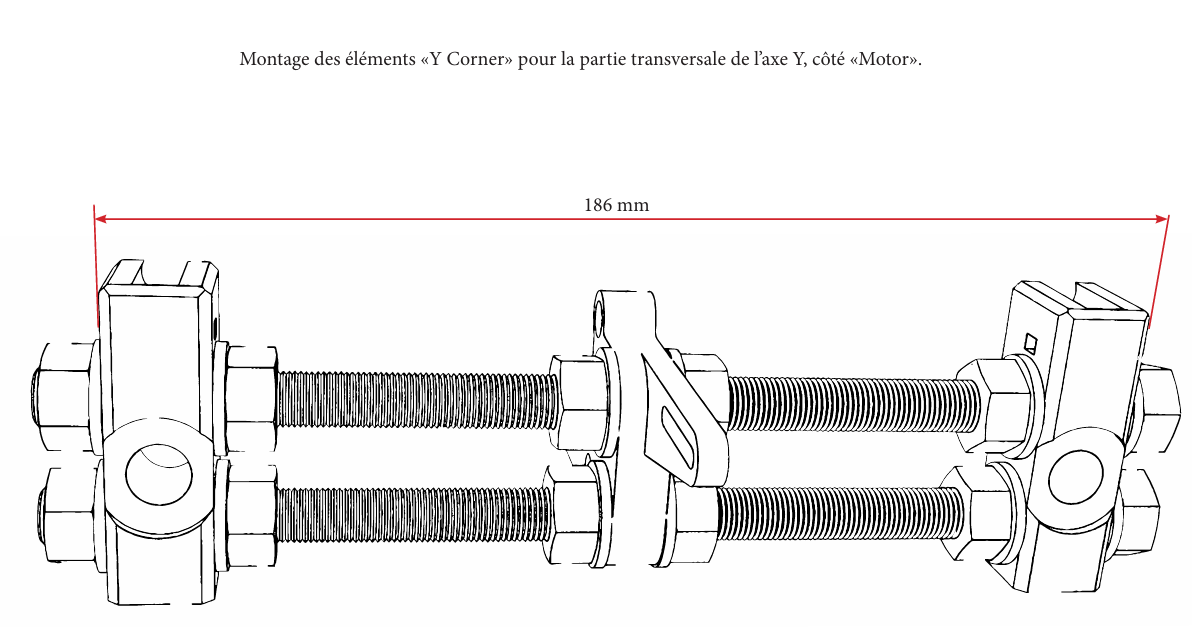
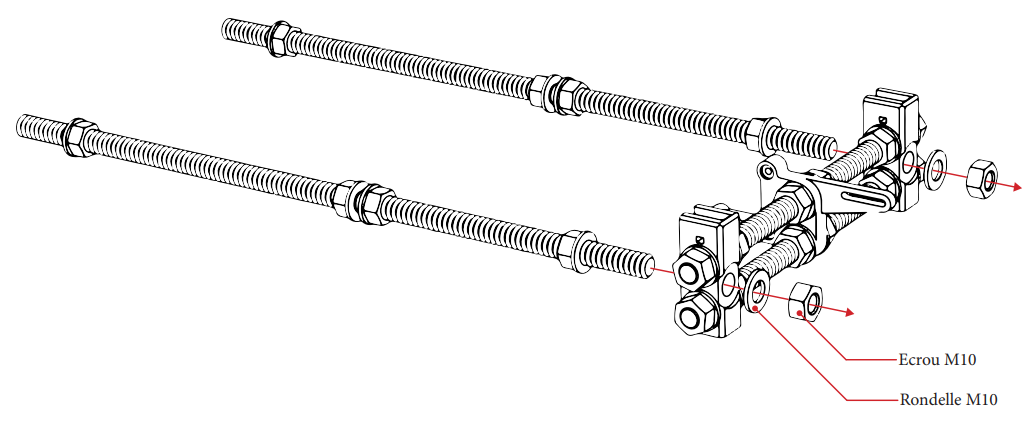
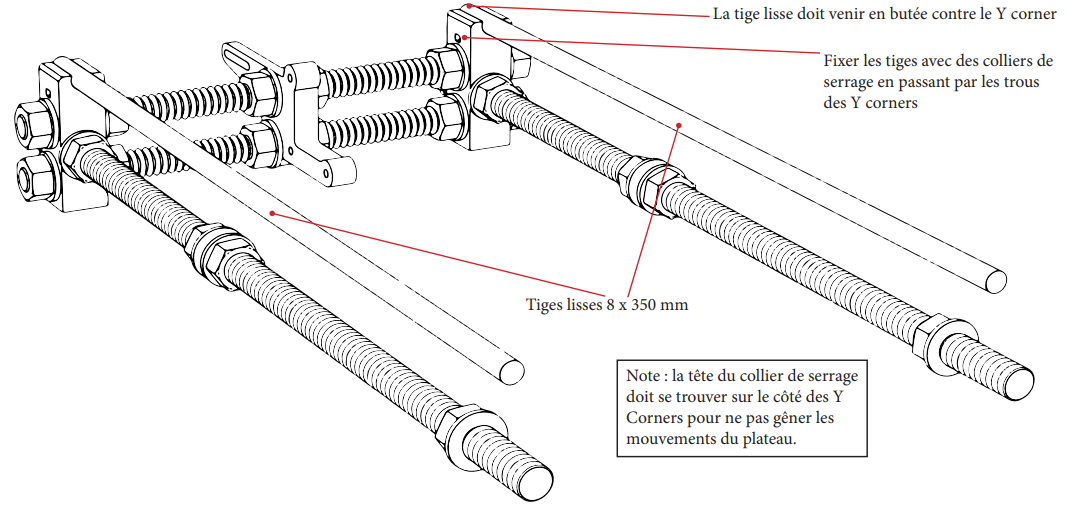
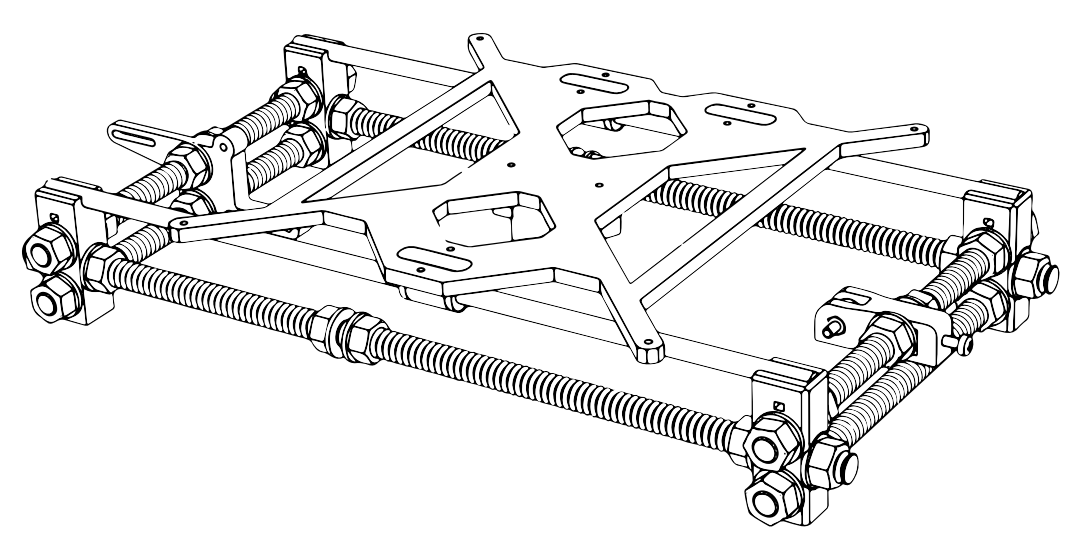
# Montage PRUSA I3 REWORK 1.5
Alexa Raynal Cobo
### Inventaire
[https://www.reprap-france.com/centre-telechargement](https://www.reprap-france.com/centre-telechargement)
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-10/go5image.png)
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-10/TFPimage.png)
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-10/FIhimage.png)
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-10/X94image.png)
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-10/cXMimage.png)
Il manque 1 moteur
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-10/oxJimage.png)
Outils nécessaires pour l'assemblage
Maillet • Tournevis plat • Tournevis cruciforme • Clé plate 5.5 , 7 et 17 • Clé Allen (fournie) • Clé Allen M4 • Pince plate • Pince coupante • Cutter • Mètre ruban
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-10/NvAimage.png)
Done
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-10/PE6image.png)
pas sure du m4x20 , c'est réglé !!
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-11/image.png)
fait
[fait](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-11/09Nimage.png)
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-11/sc2image.png)
fait
[fait](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-11/lsPimage.png)
[fait](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-11/BS1image.png)
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-11/5VXimage.png)
fait
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-11/vgfimage.png)
fait
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-11/Ubiimage.png)
fait
# Boite à cartes emprunt matériel
Quand une personne a besoin d'une servante, d'un ordinateur ou autre, un EE lui demande sa carte en échange de la clé de la servante. Puis il la dépose sur le bureau à l'entrée et note sur un post-it ce qui a été emprunté. Résultat : montagne de post-it et risque de perte de la carte...
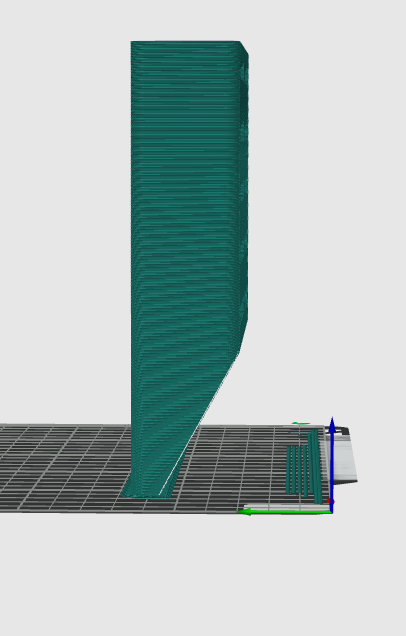
1) Modélisation 3D sur Rhino 3D du boitier
Modélisation d'une boite avec 10 fentes inclinées, d'une profondeur qui permette de laisser visible la photo de la carte de l'étudiant.
Ajout de 2 fentes latérales permettant d'y insérer 2 plaques sur lesquelles seront annotés les numéros des servantes empruntées.
2) Impression sur la Bambulab
- Slicer : Bambu studio
- Plateau texturé
- PLA eSUN violet-bleu
[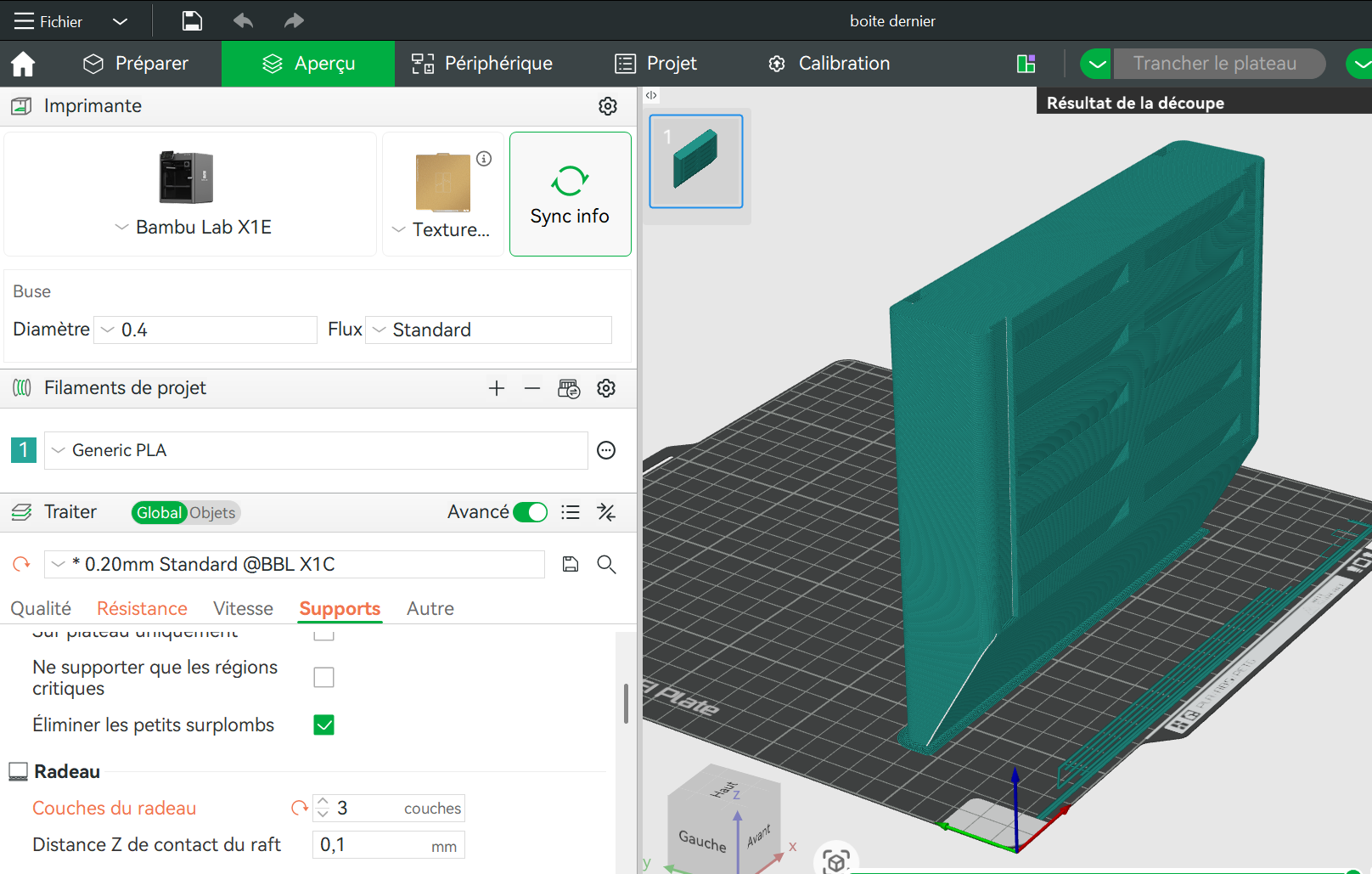](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-12/capture-decran-2025-12-15-215831.png)
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-12/capture-decran-2025-12-15-215909.png)
Impression verticale, permet de ne générer aucun support, mais ajout d'un radeau pour assurer une bonne adhérence.
3) Découpe laser
- CP peuplier 3mm
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-12/capture-decran-2025-12-15-214150.png)
4) Assemblage
Collage des étiquettes en bois sur le boitier avec de la super glue.
[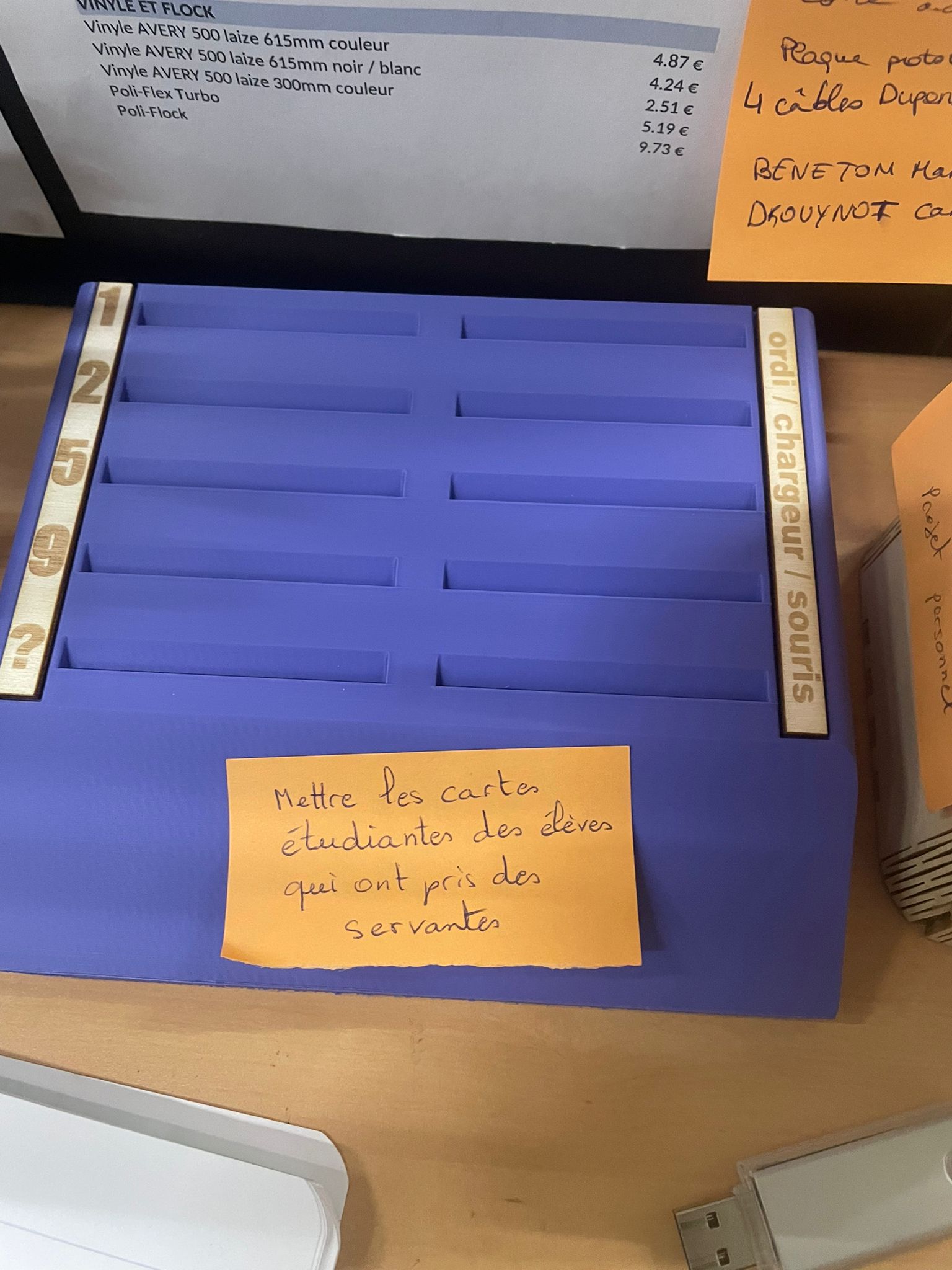](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-12/whatsapp-image-2025-12-15-a-22-04-34-58fea00f.jpg)
PS : il n'y a d’emplacements que pour les servantes 1, 2, 5, 9 car ce sont les seules qui sont empruntées/empruntables, les autres ont d'autres usages. Le ? c'est au cas où, un emprunt inhabituel.
Anna Ovazza
# Panneau horraire entrée proto
# Recyclage de PLA en plaques
Au Fablab la quantité de "déchets" de PLA, provenant d'impressions 3D ratées ou des supports, est DEMENTIELLE !
Pour les valoriser, nous avons une extrudeuse, mais après plusieurs essais d'étudiants et d'emplois étudiants, on s'est rendu compte que les procédés pour refabriquer du filament étaient très fastidieux (beaucoup d'étapes) et génèrent tout de même des déchets (produits intermédiaires pour la purge).
J'essaye donc de trouver des moyens de réutiliser ces restes de PLA et de redonner une matière usinable.
Le but est d'essayer d'obtenir des plaques de plusieurs épaisseurs, pour ensuite les découper à la laser ou bien à la découpeuse jet d'eau.
#### 1) Tri et broyage du PLA
J'ai trié les chutes de PLA par couleurs puis j'ai utilisé la broyeuse disponible à l'espace biologie-chimie pour obtenir des morceaux de PLA assez petits : le but est d'obtenir des copeaux de petites tailles et homogènes pour garantir que l'ensemble fonde de manière homogène et assez rapidement.
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/whatsapp-image-2026-05-22-at-15-44-14-2.jpeg)
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/whatsapp-image-2026-05-22-at-15-44-14-5.jpeg)
Les déchets trop fin, types "spaghettis" provenant d'échecs d'impressions sont déconseillés, il ont tendances à s’emmêler dans les dents de la machines. Faudrait essayer en les pré-découpant.
#### 2) Préparation
J'utilise une presse à panini/grill pour faire fondre le PLA entre 2 couches de papier cuisson. La presse que j'utilise est rainurée, c'est pas idéal mais ça peut être intéressant ?
# Inventaire été 2024
11/06/2024 Salah Eddine et Enora
On a rangé les armoires W3 W4 W5 et mis a jour l'inventaire sur Fabtrack.
On a aussi rangé les armoires W6 W7 W8 (Peinture, Adhésifs, ... )
W3 (OK)
| Raspberry Pi Camera Module 2 | 2 |
| Power Supply Type C | 6 |
Téléobjectif 16mm HQ Raspberry Pi | 3 |
| Honk USB speaker | 3 |
| Grand angle 6mm HQ | 2 |
NoIR Camera V2 8MP Raspberry Pi | 2 |
| Châssis DG007 | 3 |
| Raspberry Pi 3 B+ | 9
|
| HQ Camera | 2 |
| Caméra thermique MLX90640 55° | 2 |
Rtk.GPIO Raspberry PI | 1 |
| Souris Mouse Raspberry Pi | 7
|
| TFT 35 Touch Sheild | 2 |
Trépied pour HQ cam Raspberry Pi | 1 |
Fisheye Camera 5MP Raspberry Pi | 1 |
Caméra à vision nocturne 70° | 1 |
| Micro SD Noobs 32GB | 2 |
| Brushless DC FAN | 1 |
| Objectif CS camera HQ | 1 |
| Camera Module 2 8MP | 1 |
| RP 400 (simple) | 6 |
| RP 400 (kit complet) | 6 |
| Ecran tactile 3.5" | 5 |
W4 (OK)
| MSP432P401R LAUNCHPAD TXI
| 5
|
| CATRE ARDUINO SMALL
| 4
|
| REPRAP FRARCE
| 1
|
| GROVE MEGA SHIELD
| 1
|
| ARDUINO DUE MEGA
| 6
|
| 012386 C070106
| 1
|
| ECRAN LCD
| 10
|
| ADAFRUIT FEATHER RP2040
| 9
|
| ACCELEROMETER
| 3
|
| FEATHER HUZZAH ESP32
| 1
|
| SENSEFEATER
| 2
|
| HAILEGE TB6612FNG MOSFETARDUINO
| 1
|
| M+NEOPIXEL RING 16\*WS2
| 1
|
| USB LIPO CHARGER
| 2
|
| LILYPAD ARDUINO SIMPLE BOARD 2 (dans les tiroir C) | 2
|
| RGBW LED STRIP 5500K 10 LED
| 1
|
| JOYSTICK FREAKELEC XPAD MODULE
| 15
|
| BEAGLEBONE BLACK REV A8
| 2
|
| BEAGLEBOARD PAD
| 2
|
| 4DDCAPE43T SYSTEM 4D
| 1
|
W5 (OK)
| CONNECTEUR UNIVERSAL 4 PIN 20CM
| 18
|
| CONNECTEUR UNIVERSAL 4 PIN 5CM
| 18
|
| 460PCS JSTXH CONNECTOR KIT
| 1
|
| CRIMP TERMINAL
| 4
|
| BJACK TIN PL
| 2
|
| VISHAY RESISTOR
| 1
|
| CONNECTOR 0986
| 100
|
| CONNECTOR 09825
| 100 |
| CONNECTOR 09828
| 100
|
| CONNECTOR 09827
| 50
|
| CONNECTOR 0WICKN2.7
| 1
|
| CONNECTOR G015282B4
| 1
|
| CONNECTOR UNI 4P FEMALE
| 18
|
| CONNECTOR STEMMA QT
| 1
|
| WS2812B LED STRIP
| 1
|
| MC14F10ND
| 1
|
| CONNECTOR P411
| 1
|
| PINCE DENUDER
| 4
|
| CONNECTEUR 09816
| 1
|
| CONNECTEUR 31232
| 1
|
| CONNECTEUR 09818
| 1
|
| COONECTEUR 31234
| 1
|
| HAUT PARLEUR
| 1
|
| CONNECTEUR S6BZRSM4ATF
| 10
|
| CONNECTEUR 143129
| 1
|
| CRIP PETIT
| 1
|
| CONNECTEUR 7620780
| 5
|
| CONNECTEUR 5427157
| 5
|
| CONNECTEUR B6BZR
| 5
|
| CONNECTEUR 2799241
| 5
|
| PRISE UK
| 3
|
| BOITIER 2 RANGEE 6 VOIES
| 2
|
| CONNECTEUR 7620780
| 1
|
| CONNECTEUR 7644521
| 1
|
| CONNECTEUR 143129
| 1
|
| BOITIER 1 RANGEE 4 VOIES
| 1
|
| CONNECTEUR 09819
| 1
|
# FabBOT 1.0
Le « Super Robot D’accueil » devient le FabBOT 1.0. Suivez ici l’avancée du projet, nos idées, leurs réalisations !
# Présentation du projet
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-01/cartoon-ai-robot-scene.jpg)
Et oui, on y est, l'ère où les robots remplacent les hommes. Les médiateurs du Fablab n'y coupent pas. Une petite télévision, venue tout droit de l'espace, débarque au Fablab et entend bien faire régner l'ordre. De l'espace ? L'allure de cosmonaute qu'elle affiche ne dupe personne et son look rétro a bien vite fait de nous renseigner sur sa véritable identité : ce n'est qu'un vieux téléviseur des années 70. Du moins, en apparence...
##### Objectif du projet :
L'objectif du projet est de réaliser un petit robot pour l'accueil des visiteurs du Fablab.
Il assurerait différentes fonctions :
- Animation du FabLab
- Information des visiteurs
- Appel des Médiateurs
##### Cahier des charges :
| Fonctions
|
|
|
|
| FP1 | Détecter l'arrivée de nouveaux visiteurs | Reconnaissance faciale/forme humaine
|
|
| FP2 | Interagir oralement avec un utilisateur sur la base de questions fermées => demander de répondre par oui ou non !
| Reconnaissance vocale/micro | Oui/Non
Yes/No
|
| FP3 | Effectuer des mouvements de rotation autour de sa base ( tête indépendante )
| Motorisation de la base
| Axe Z : 360°
|
| FP4 | Avoir différents modes de fonctionnement
| Logiciel | Actif
Pause
Gentil/méchant
|
| FP5 | Emettre un signal sonore caractéristique audible dans tout le FabLab pour prévenir les médiateurs | Système de haut-parleur | Combien de DB ? |
| FC1 | Tenir sur le comptoir à l'accueil du FabLab | Dimensionnement | Longueur : 30 cm
Largueur : 30 cm
Hauteur : 50 cm
Taille de la télé ( 20x20x35)
|
| FC2 | Être nomade, facilement déplaçable et transportable | Dimensionnement, | |
| FC3 | Être alimentée électriquement | Branchement secteur ou batterie rechargeable ou charge induction | Volt, Ampère ?
|
| FC4 | Ne pas être trop énergivore | Consommation électrique/flux de données et Optimisation | |
| FC5 | Pouvoir être mis à jour et fonctionner de façon autonome | Connecteur USB / Logiciel | |
Une idée : servir de moniteur "design" = mode de fonctionnement
En mode moniteur : un mode veille = il ferme les yeux et dors, ouvre parfois un œil, baille ... : si mouvement de souris détecté, sortie du mode veille.
Oui mais l'idée n'est pas vraiment de créer un Périphérique. C'est plutôt de créer un **système embarqué** AUTONOME qui pourra être facilement déployé dans les quatre coins du Fablab pour pouvoir servir, par exemple, de bornes d'information pour les utilisateurs.
Alors dans ce cas =>affichage de l'écran stream ? Trop énergivore ...
Ou bien ! => modem ?
Modem-routeur : wifi ?
Mode robot activé
Si bornes d'information : connexion à un serveur et envoie de requêtes
=> Base de données / ChatBot
##### Prototype 0
Scénario :
Les médiateurs Fablab ne sont pas présents à l’accueil, le mode "Actif" est activé.
Un visiteur entre au FabLab.
Le Robot :
-Bonjour, bienvenu(e) au FabLab, êtes-vous enregistré(e) ?
-Oui/Non
Si oui : demandera dans une version ultérieure si l'utilisateur a besoin d'information.
Si non : siffle pour appeler un médiateur FabLab
Comment mettre à jour un système embarqué
##### Plan d'action :
- Définir le besoin du client et construire un cahier des charges.
- Valider le cahier des charges.
- Effectuer une recherche biblio, solution open source
- Déterminer le type de caméra à utiliser ( module intel kinect module 2 caméra : prétraitement du signal ? )
- Identifier les différentes composantes du système et leurs fonctions.
- Prévoir un dispositif de mises à jour du logiciel embarqué
- Demander des idées => faire une affiche !! ( QR code, questionnaire ) : recruter des talents
Matériel et pré-requis :
\- Hardware/Software ?
\- optimisation => Justification des choix !!!
\- **Python** ou C++ ?
langage assembleur ?
\- écran LCD couleur pour visage
\- motorisation : Arduino/raspberry ( latence ? )
\- intégration du wifi ? communication via le réseau ?
\- écran tactile => configuration/personnalité
\- système de chargement batterie ? secteur ?
\- système embarqué : raspberry pi
\- Le design : celui de la télé mais pas la télé !!!
GNU/linux ou Raspberry Pi OS ( ex-raspbian )
##### Inventaire et estimation des coûts
| Matériel
| Fonction
| Disponibilité
| Coût
| Autres infos
|
| Arduino UNO
| Motorisation
| OUI? - Magasin Fablab
| /
| Rupture de stock ?
|
| Raspberry Pi (Linux?)
| Système embarqué
| OUI
| / | Quel modèle pour notre utilisation ?
Raspberry Pi 4 modèle B ?
|
| Caméra Module 2 8MP
| Reconnaissance facial
| OUI - Magasin Fablab
| /
| Fonctionne avec Raspberry Pi
|
| Écran LCD Couleur Tactile
| Visage, configuration/personnalité
| NON |
|
|
| Moteur Pas à Pas | Motorisation | OUI | / | Fonctionne avec Arduino |
| Batterie | Energie électrique |
| |
|
##### Budget prévisionnel
##### Schéma de fonctionnement
[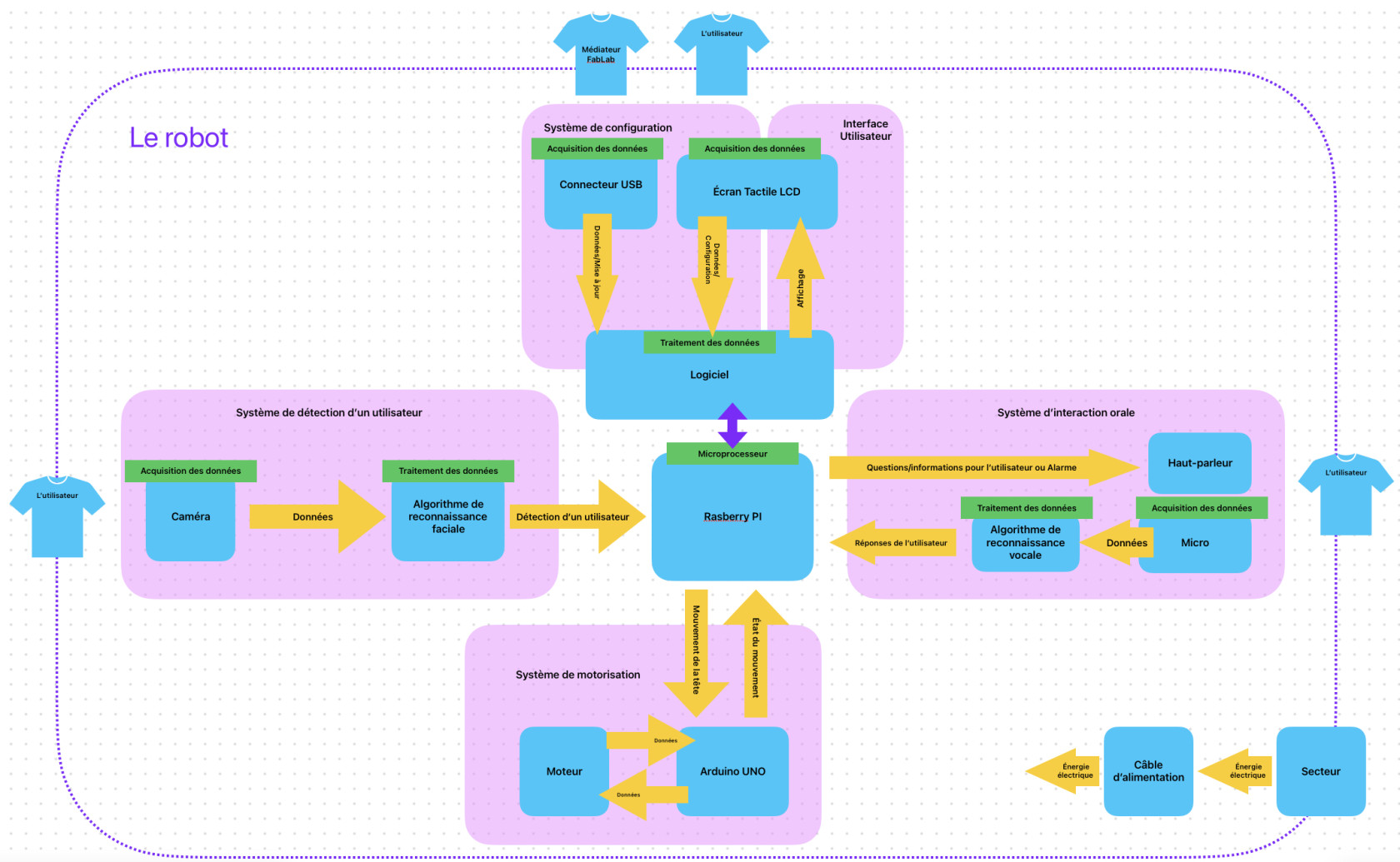](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-01/img-0002.jpeg)
Important ! Système de ventilation => éviter la surchauffe
-> raspberry !
##### Le DESIGN :
Inspiration
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-02/image.png)
Soit le design de la Télé mais comment faire ?
Soit, inventer un design : demander des idées
-> Faire ce qui est possible au fabLab et qui rentre dans le budget
-> Inclure tous les systèmes à l'intérieur
Schématiser les différents design et les assembler comme un puzzle
Possibilité de cacher des systèmes dans la base : attention aux dimensions !
Pour la base de données :
- conserver les questions posées sans réponse pour les ajouter à la base de données
est-ce que j'ai répondu à vos atteintes ? Non -> appel des médiateurs
Carnet de bord :
- 04/12/2024 : Définition des objectifs et des limites du projet. Première ébauche du cahier des charges
- 18/12/2024 : Etude bibliographique
- 06/01/2025 : Etude bibliographique, inventaire du matériel nécessaire et disponible, diagramme.
- 08/01/2025 : Finalisation du cahier des charges.
- 13/01/2025 : Répartition des tâches et budgétisation.
Vers l'infini et au-delà
- afficher les utilisateurs dont le wiki n'est pas à jour
- Un système de badges des cartes étudiantes ? => problème concernant la confidentialité des données
- full système de communication ( GPT )
- serveur déporté/renvoie de requête
- système LoRaWAN ( antenne radio ) => biper les emplois étudiants ! Si un robot n'a pas réussi à répondre à la demande de l'utilisateur ( composante RF radiofréquence )
Spécificité plus techniques liées à l'optimisation :
\- temps d'exécution des tâches
Choix d'un nom ?
- Le FabBOT
Comments Alex:
Il faudrait commencer à réaliser des essais et tenter d'avoir un *Minimum Viable Product* afin d'avoir une 'base' sur laquelle itérée (il y aura d'autres problématiques que nous allons découvrir). Commencer avec quelque chose de très basique et ensuite itérer et améliorer, pas essayer d'avoir le produit final parfait au premier coup. Laisser l'esthétique et optimisation pour la fin, pas pour le début;
Il serait intéressant de commencer par exemple par tester **YOLO**, qui peut être utilisé localement (Python) et qui est utile pour la détection visuelle.
Ensuite il est possible d'interfacer avec une carte ESP32 via le port *serial* et on pourrait connecter des moteurs à une caméra et faire du *tracking* en temps réel. Cela peut être intéressant également pour la partie de reconnaissance vocal (on peut directionner le micro par exemple...).
L'ESP32 peut créer voir se connecter à un réseau wifi, donc pas besoin de LoRA. Les ESP-XIAO sont très petit, peut coûteux et peuvent être un choix sensé.
-> les ESP peuvent être des clients dans le serveur et recevoir les fameux *pings* quand quelqu'un est à *l’accueil* par exemple.
Ensuite le code Python peut interfacer, une fois il détecte quelqu'un, avec un modèle entraîné pour la partie de reco. vocal, et l'activer...
| Une fois ceci réalisé, il serait désormais, et pas avant (à mon avis), une bonne idée de s'interroger sur la partie esthétique du projet/ produit final... |
Premier essais:
tracking avec YOLO et sortie avec serial connecté à un arduino uno.
code: https://github.com/alexcrrera/fablabBot/blob/main/fabu.py
[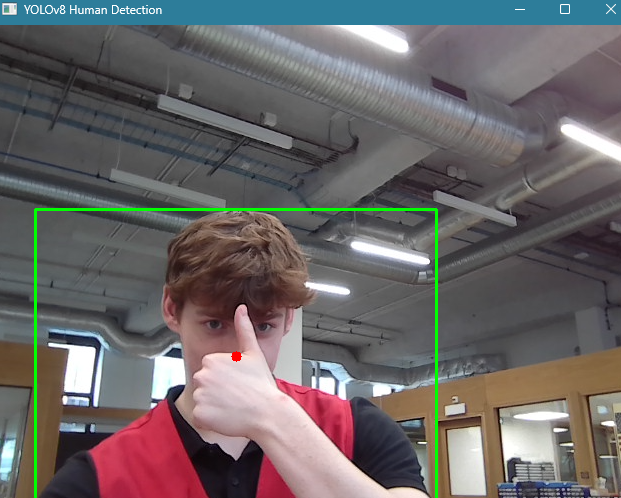](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-03/aVwimage.png)
Le centre relatif de la détéction (le point rouge) est envoyé à l'arduino pour centrer la caméra. Il faudrait trouver une webcam et faire un support avec les servomoteurs du fablab (ceux qui sont labellés "servo ++", les "bleus" ne sont pas du tout suffisament puissant.
##### Bibliographie
Notion : informatique, électronique, système embarqué, système interactif, PSoC
**Système de motorisation**
**[https://arduino-france.site/moteur-pas-a-pas/](https://arduino-france.site/moteur-pas-a-pas/)**
**[https://www.aranacorp.com/fr/pilotez-un-moteur-cc-avec-arduino/amp/](https://www.aranacorp.com/fr/pilotez-un-moteur-cc-avec-arduino/amp/)**
**Système embarqué**
**[https://perso.univ-lyon1.fr/jean-patrick.gelas/doc/sle/embarque-support\_de\_cours-2020-a-distance.pdf](https://perso.univ-lyon1.fr/jean-patrick.gelas/doc/sle/embarque-support_de_cours-2020-a-distance.pdf)**
[https://test-logiciel.fr/article/logiciel-embarque-definition-exemples-avantages-et-inconvenients/](https://test-logiciel.fr/article/logiciel-embarque-definition-exemples-avantages-et-inconvenients/)
[https://fr.wikipedia.org/wiki/Modem](https://fr.wikipedia.org/wiki/Modem)
**[https://f2school.com/wp-content/uploads/2020/03/Syst%C3%A8mes-embarqu%C3%A9s-cours-01.pdf](https://f2school.com/wp-content/uploads/2020/03/Syst%C3%A8mes-embarqu%C3%A9s-cours-01.pdf)**
**[https://www.mcours.net/cours/pdf/leilclic3/leilclic667.pdf](https://www.mcours.net/cours/pdf/leilclic3/leilclic667.pdf)**
**[https://objets.ccdmd.qc.ca/manuel/1-5-presentation-darduino-et-de-son-environnement-de-developpement/](https://objets.ccdmd.qc.ca/manuel/1-5-presentation-darduino-et-de-son-environnement-de-developpement/)**
[Les Fondamentaux des Systèmes Embarqués : Un Guide pour les Débutants](https://www.parlezvoustech.com/systemes-embarques-guide-debutants/ "https://www.parlezvoustech.com/systemes-embarques-guide-debutants/")
[Différence entre Arduino et Raspberry pi](https://arduinofactory.fr/difference-entre-arduino-et-raspberry-pi/ "https://arduinofactory.fr/difference-entre-arduino-et-raspberry-pi/")
[Cours Systèmes Embarqués : Introduction](https://www.technologuepro.com/cours-systemes-embarques/cours-systemes-embarques-introduction.htm "https://www.technologuepro.com/cours-systemes-embarques/cours-systemes-embarques-introduction.htm")
ROS - Robot Operatin System
[ROS tutorial ](https://www.youtube.com/watch?v=ehtUb55Rmmg&list=PLk51HrKSBQ8-jTgD0qgRp1vmQeVSJ5SQC&index=1&ab_channel=ShawnC "https://www.youtube.com/watch?v=ehtUb55Rmmg&list=PLk51HrKSBQ8-jTgD0qgRp1vmQeVSJ5SQC&index=1&ab_channel=ShawnC")
[Rosserial](https://wiki.ros.org/rosserial "https://wiki.ros.org/rosserial")
[ROS and Arduino](https://www.youtube.com/watch?v=WLVfZXxpHYI&ab_channel=TizianoFiorenzani "https://www.youtube.com/watch?v=WLVfZXxpHYI&ab_channel=TizianoFiorenzani")
[ROS and Raspberry pi](https://www.youtube.com/watch?v=iLiI_IRedhI&ab_channel=TizianoFiorenzani "https://www.youtube.com/watch?v=iLiI_IRedhI&ab_channel=TizianoFiorenzani")
[What is ROS2 ?](https://www.youtube.com/watch?v=7TVWlADXwRw&ab_channel=RaymondAndrade "https://www.youtube.com/watch?v=7TVWlADXwRw&ab_channel=RaymondAndrade")
[Building a ROS Robot for Mapping and Navigation](https://www.youtube.com/watch?v=q1u_cC-5Sac&ab_channel=JamesBruton "https://www.youtube.com/watch?v=q1u_cC-5Sac&ab_channel=JamesBruton")
[The ROS Transform System](https://www.youtube.com/watch?v=QyvHhY4Y_Y8&ab_channel=ArticulatedRobotics "https://www.youtube.com/watch?v=QyvHhY4Y_Y8&ab_channel=ArticulatedRobotics")
[How to start making AUTONOMOUS ROBOT with the ATTLER](https://www.youtube.com/watch?v=jlrUUotkIlk&ab_channel=stepbystep-robotics "https://www.youtube.com/watch?v=jlrUUotkIlk&ab_channel=stepbystep-robotics")
Logiciel embarqué
[https://www.lifewire.com/hardware-vs-software-vs-firmware-whats-the-difference-2624567](https://www.lifewire.com/hardware-vs-software-vs-firmware-whats-the-difference-2624567)
[https://rtone.fr/blog/logiciel-embarque-firmware/](https://rtone.fr/blog/logiciel-embarque-firmware/)
Linux
[https://openest.io/linux-embarque/developpement-linux-embarque-5-etapes-pour-commencer/](https://openest.io/linux-embarque/developpement-linux-embarque-5-etapes-pour-commencer/)
Mise à jour du système embarqué
[https://openest.io/linux-embarque/comment-mettre-a-jour-un-systeme-embarque/](https://openest.io/linux-embarque/comment-mettre-a-jour-un-systeme-embarque/)
[https://github.com/sbabic/swupdate](https://github.com/sbabic/swupdate)
Rasberry pi
[https://blog.webnet.fr/comment-creer-un-assistant-daccueil-avec-raspberry-pi-reconnaissance-faciale-avec-opencv/](https://blog.webnet.fr/comment-creer-un-assistant-daccueil-avec-raspberry-pi-reconnaissance-faciale-avec-opencv/)
[https://blog.webnet.fr/comment-creer-un-assistant-daccueil-avec-raspberry-pi/](https://blog.webnet.fr/comment-creer-un-assistant-daccueil-avec-raspberry-pi/)
[https://www.youtube.com/watch?v=gU6gmrPHb1s](https://www.youtube.com/watch?v=gU6gmrPHb1s)
[https://www.raspberrypi-france.fr/10-projets-fascinants-a-realiser-avec-un-raspberry-pi/](https://www.raspberrypi-france.fr/10-projets-fascinants-a-realiser-avec-un-raspberry-pi/)
[https://fastercapital.com/fr/contenu/Domotique---Transformez-votre-maison-avec-RPi.html](https://fastercapital.com/fr/contenu/Domotique---Transformez-votre-maison-avec-RPi.html)
[https://arduiblog.com/category/robots/](https://arduiblog.com/category/robots/)
Rasberry Pi OS
[https://www.raspberrypi.com/software/](https://www.raspberrypi.com/software/)
Choix du système d'exploitation
[https://monraspberry.com/quel-systeme-dexploitation-pour-raspberry-pi/](https://monraspberry.com/quel-systeme-dexploitation-pour-raspberry-pi/)
**Caméra et reconnaissance de forme humaine**
ESP32 et Caméra + algorithme python ( voir wiki [Akli & Wang](https://wiki.fablab.sorbonne-universite.fr/BookStack/books/projets-due-2024-2025-suite/page/mu5eeh12-akli-wang-project-sesame) )
[https://fr.amen-technologies.com/real-time-face-recognition-with-raspberry-pi](https://fr.amen-technologies.com/real-time-face-recognition-with-raspberry-pi)
**Reconnaissance vocale**
**[https://peerdh.com/fr/blogs/programming-insights/implementing-real-time-speech-recognition-on-raspberry-pi-using-tensorflow-lite](https://peerdh.com/fr/blogs/programming-insights/implementing-real-time-speech-recognition-on-raspberry-pi-using-tensorflow-lite)**
**[https://www.raspberry-pi.ovh/blog/index.php?creer-une-interface-vocale-et-commander-votre-raspberry-pi](https://www.raspberry-pi.ovh/blog/index.php?creer-une-interface-vocale-et-commander-votre-raspberry-pi)**
**Affichage et écran LCD tactile**
**[https://testeurjoe.fr/test-du-moniteur-raspberry-pi-moniteur-portable-bien-construit-qui-fonctionne-avec-nimporte-quel-appareil-compatible-hdmi/](https://testeurjoe.fr/test-du-moniteur-raspberry-pi-moniteur-portable-bien-construit-qui-fonctionne-avec-nimporte-quel-appareil-compatible-hdmi/)**
**Système serveur/Wifi ?**
**[https://www.raspberry-lab.fr/Debuter-sur-Raspberry-Francais/Connecter-le-Raspberry-Pi-au-Wifi/](https://www.raspberry-lab.fr/Debuter-sur-Raspberry-Francais/Connecter-le-Raspberry-Pi-au-Wifi/)**
**[https://raspberrytips.fr/configurer-wifi-raspberry-pi/](https://raspberrytips.fr/configurer-wifi-raspberry-pi/)**
**[https://monraspberry.com/connexion-a-distance-sur-un-raspberry-pi/](https://monraspberry.com/connexion-a-distance-sur-un-raspberry-pi/)**
**[https://raspberrytips.fr/raspberry-pi-connect-tutoriel/](https://raspberrytips.fr/raspberry-pi-connect-tutoriel/)**
**[https://raspberry-pi.fr/connecter-ssh-raspberry-pi/](https://raspberry-pi.fr/connecter-ssh-raspberry-pi/)**
# Le système embarqué
Prise en main de Raspberri Pi
Aujourd'hui, nous nous concentrons sur la découverte et la familiarisation avec les cartes Raspberri Pi plus précisément, la Raspberry Pi 4 Computer Model B avec 8Go de RAM. Le choix de ce modèle c'est fait sur la base de la disponibilité au Fablab.
Présentation de la carte :
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-03/img-6498.jpeg)
Composants de la carte :
[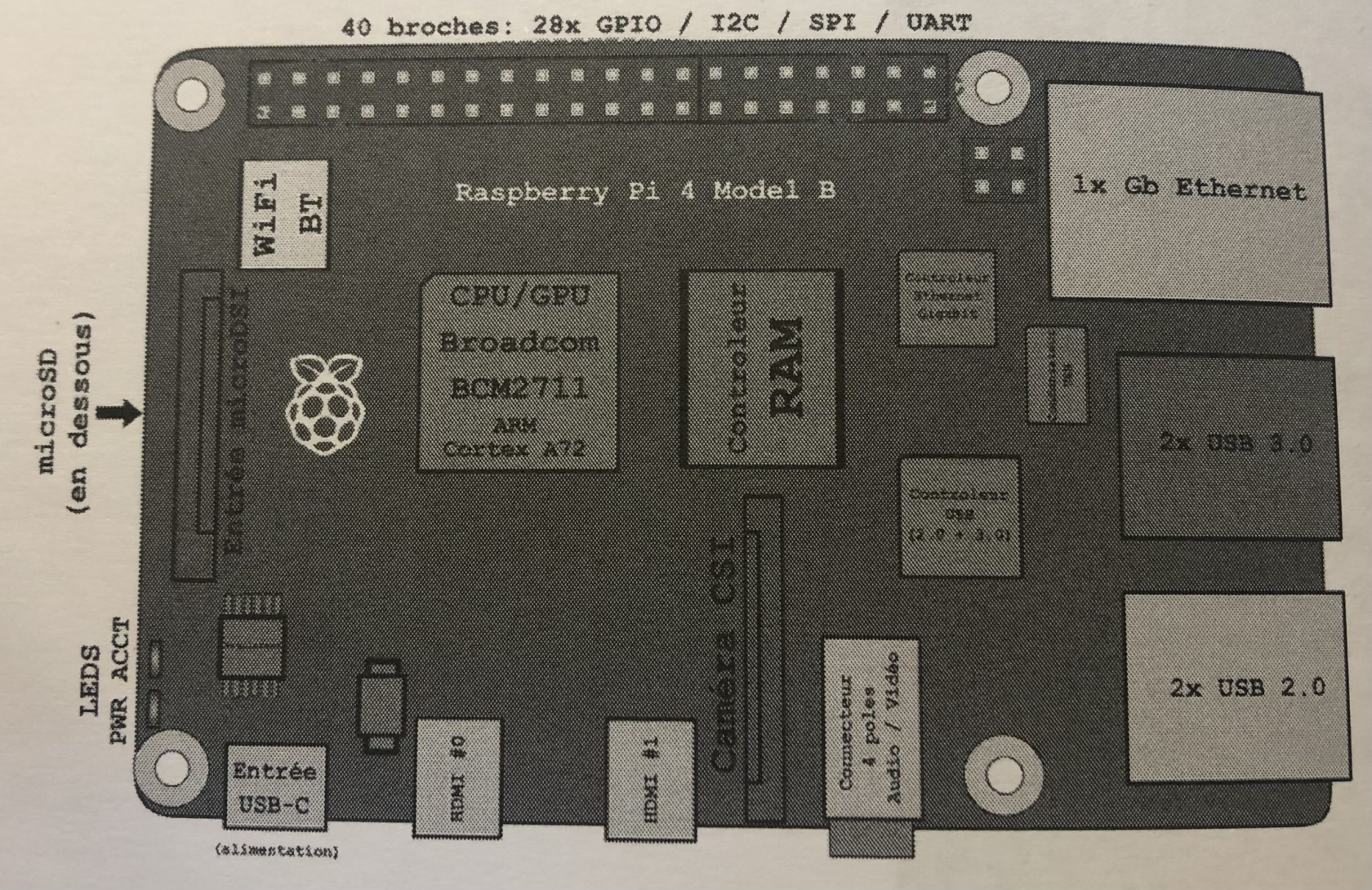](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-03/rbOimg-6503.jpeg)
Le codage de la carte nécessite l'utilisation d'une carte microSD à insérer dans le port prévu à cet effet. La carte microSD va contenir le système d'exploitation sur lequel va tourner notre logiciel. Le Raspberry Pi peut fonctionner sous diverses systèmes d'exploitation (Linux etc) dont le choix va dépendre de l'utilisation que l'on veut en faire. Nous nous pencherons plus tard sur le sujet. Pour l'heure, afin de faciliter au mieux notre familiarisation, nous utiliserons le système d'exploitation officiel, recommandé, soit le Raspberry Pi OS ( anciennement Raspbian ). Ce système existe lui même en deux versions, le Raspberry OS Desktop pour un usage très générale, et le Raspberry OS lite dépourvu d'interface graphique. Nous utiliserons le premier.
**Installation de Raspberry Pi OS sur la carte microSD :**
Pour ce faire, vous aurez besoin de 3 choses : une carte microSD de 32Go à 2To, un ordinateur capable de lire une carte microSD ( sinon, d'un adaptateur ), l'image du système d'exploitation Raspberry Pi OS et le petit logiciel Raspberry Pi Imager qui permet de graver l'image du système d'exploitation sur la carte.
Voici pour commencer le lien de téléchargement de l'image du système d'exploitation Raspberry Pi OS et de Raspberry Pi Imager: [https://www.raspberrypi.com/software/](https://www.raspberrypi.com/software/)
[https://www.raspberrypi.com/documentation/computers/getting-started.html#setting-up-your-raspberry-pi](https://www.raspberrypi.com/documentation/computers/getting-started.html#setting-up-your-raspberry-pi)
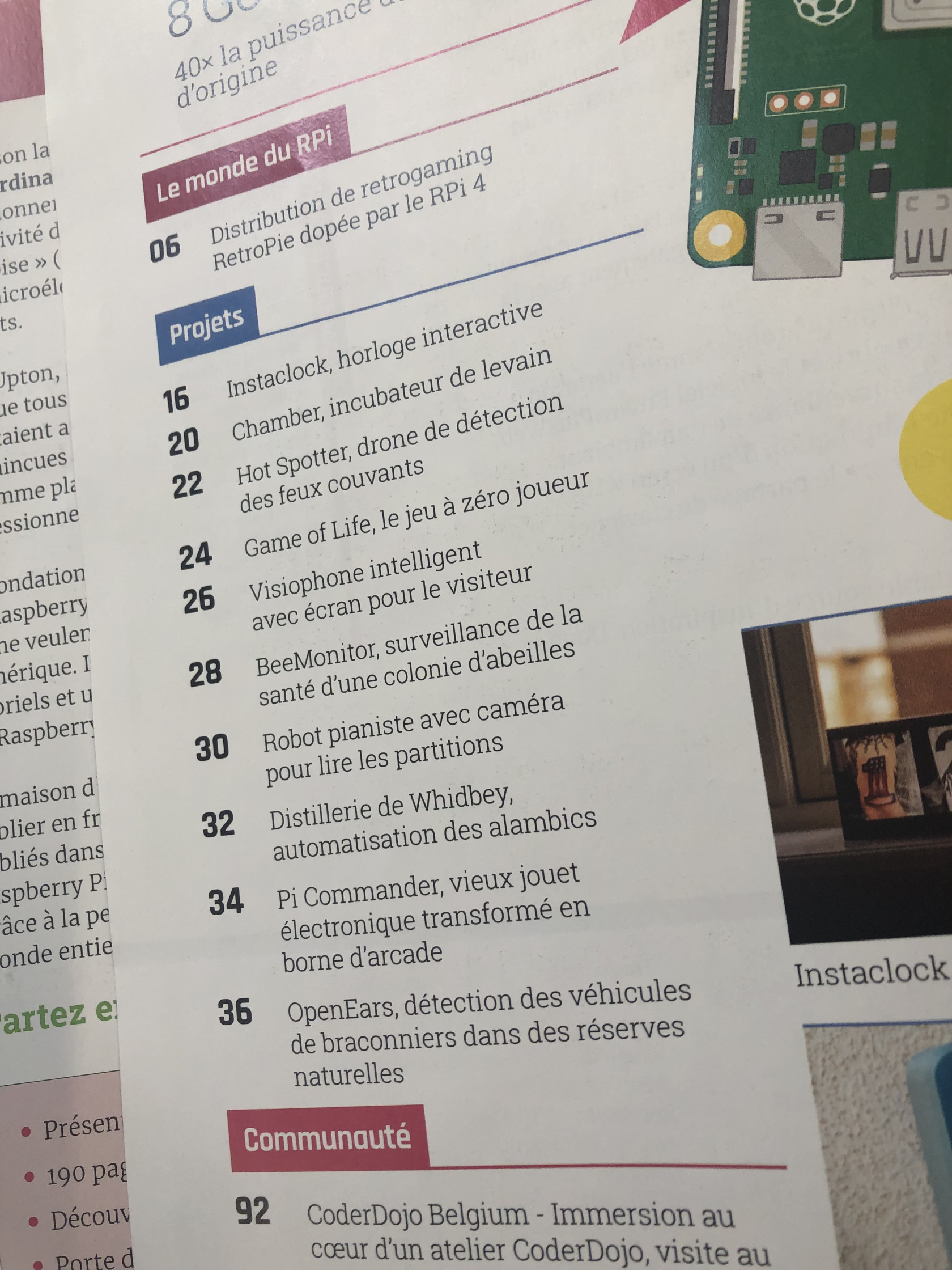
**Quel système d'exploitation choisir ?**
Heureusement pour nous, le Fablab est un trésor qui regorge de ressources. Regardez la trouvaille !
Page pouvant nous intéresser pour le projet :
Page 26 : Visiophone intelligent avec **écran pour le visiteur**
Page 30 : Robot pianiste avec une caméra pour **lire les partitions => reconnaissance visuelle**
Page 34 : Pi Commander, vieux jouet électronique transformé en **borne** d'Arcade
Page 36 : OpenEars, **détection** de véhicules de braconniers dans des réserves naturelles. => capteur acoustique
Page 42 : Miroir magique à reconnaissance faciale
Caméra RPI, logiciel de décodage : OpenCV ([pyimagesearch.com](https://wiki.fablab.sorbonne-universite.fr/BookStack/pyimagesearch.com))
> sudo apt -y update && sudo apt -y upgrade
>
> sudo apt install libopencv-dev python3-opencv
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-03/img-6499.jpeg)
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-03/img-6500.jpeg)
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2025-03/nAsimg-6501.jpeg)
# Le système de reconnaissance faciale
Pour commencer, on se propose de suivre le tutoriel de PJ Evans page 42 du MagPi : Le miroir magique à reconnaissance faciale ! Bien sûr, il ne s'agit pas dans notre cas de créer un miroir et l'on se contentera de suivre les instructions concernant la mise en place de la **caméra** et du logiciel de **reconnaissance faciale**.
# Félicitation vous avez trouvé Valérie :) !
[https://dropsu.sorbonne-universite.fr/s/ycddeDEWMp487rp](https://dropsu.sorbonne-universite.fr/s/ycddeDEWMp487rp)