MOOREV-Microclimats et nouveau Outils d’Observation des Réponses du Vivant sur les fonds marins
Le projet MOOREV soutenu par la MITI CNRS et la Fondation de France s’inspire d'instruments développés pour les recherches sur les fonds marins en grande profondeur. Notre objectif est de permettre la co-conception et l’appropriation de modules d'observation miniaturisés et autonomes, dans un cadre de recherches participatives, pour partager les connaissances sur le rôle d'espèces constructrices d'habitats et la sensibilité aux perturbations climatiques. L’intégration de caméras et de capteurs et l’adaptation de méthodes d’analyse d’image et des outils de l’IA sont développées avec le FabLab SU dans le cadre des Ateliers de Recherche Encadrés CURIOUS (Licence 1 Sorbonne Université). Le déploiement des équipements sur le terrain, puis l’analyse des données acquises, participent aux supports pédagogiques développés à la Station Marine de Concarneau dans le cadre des ateliers des Aires Marines Educatives animés par Esprit Nat'ure.
MOOREV-Timer-Camera
Objectif : Définition, évaluation et test d'une interface programmable et de l'alimentation pour l'acquisition de séquences photos et vidéo en autonome avec GoProHero3+ et LED Cree sur de longues durées (plusieurs semaines à mois) avec ESP32et/ou Arduino Nano.
Documentation
Information:
Groupe de projet: L1 - Science Formelles Maths-Info - (février - avril 2023)
- CHU Amélie amelie.chu@etu.sorbonne-universite.fr
- SAE LIM Thierry thierry.sae_lim@etu.sorbonne-universite.fr
- PERRIN DE BRICHAMBAUT Jules jules.perrin_de_brichambaut@etu.sorbonne-universite.fr
Contexte:
Dans le cadre de notre projet d'ARE, nous nous focalisons sur la récolte de données images et vidéos d'espèces marines à l'aide de caméras et de capteurs.
Objectif:
Notre objectif est de concevoir un système autonome qui permet d'enregistrer ces données en profondeur sur une longue durée (plusieurs semaines à plusieurs mois), à faible coût et à faible consommation d'énergie.
Matériel:
- GoProHero3+
- LED Cree
- Arduino NANO/ ESP32
- Multimètre (fils/branchements)
- Breadboard
- Caisson hermétique
Machines utilisées:
Construction:
1- Réflexion sur les aspects à prendre en compte du projet (contraintes et accessibilités)
2- Recherches sur différents moyens et façons de contrôler la GoPro
3- (Tests sur comparaison Arduino Nano ESP32)
Journal de bord
Journal de bord:
06/03:
- Pour notre système il faut que l'on choisisse entre l'Arduino NANO et l'ESP32 en se basant sur leur consommation en énergie. Il faut que l'on puisse mesurer la consommation en énergie sur différentes séquences et différentes durée.
09/03: [séance Fablab]
- Durant la séance nous avons discuté du projet et en quoi le Fablab peut nous aider. Réflexion sur les tests et les protocoles à réaliser pour la consommation de la batterie avec les deux cartes, avec recherches sur la mise en veille des cartes. Recherches sur les aspects de la GoPro Hero3+ et comment la manipuler avec un programme implanté. Réflexion sur les durées et les séquences d'enregistrements pour la caméra.
- Visite de l'atelier Fablab partie électronique, avec présentation du matériel mis à disposition. Préparation du matériel pour la prochaine séance au Fablab.
10/03: [séance Fablab]
- Point et vu d'ensemble sur tout le matériel que nous possédons.
- Point sur la façon de relier le micro processeur à la GoPro. Recherches sur le port Hero de la GoPro Hero 3+ qui nous permet de conclure sur l'utilisation du port Hero pour contrôler de manière filaire la caméra. Recherche de références afin de pouvoir trouver et se procurer un branchement compatible au port Hero.
Liens:
Autre possibilité pensée de connecter la GoPro qui nécessite la modification de la caméra (idée mise de côté):
https://hackaday.io/project/12108-gopro-hero-4-wired-control
https://www.youtube.com/watch?v=mpPfk4sLb3I
Informations sur le port Hero Bus de la GoPro Hero:
https://wiki.logre.eu/index.php/GObotPRO
17/03: [séance Fablab]
- Réunion afin de préparer les tests de consommation d'énergie entre l'Arduino Nano et l'ESP32. Acquisition du matériel nécessaire, et codage des cartes.
- Tests (code) du nombre de cycles par minutes possible sur l'Arduino qui va permettre d'allumer et d'éteindre la caméra.
- Emprunt d'un ESP32 qu'on a du souder au labo électronique.
- Création d'une page Github afin de déposer notre code et recherches sur le mode hibernation de l'esp32 ainsi que la façon de récupérer les données d'un multimètre sur l'ordinateur afin d'enregistrer les données.
MOOREV-Stéréovision-calibration
Objectif : Etablir un protocole d'acquisition d'image sous-marines en stéréovision. Calibration de deux caméras GoProHero3+ pour stéréovision - réalisation du banc de calibration et tests pour imagerie sous-marine
Groupe 1
Membres du projet: BARON Ludovic, HAMDY Maryam, SAMETOGLU Alper, SAURE Carmen
Introduction
Dans le cadre de notre projet UE, nous serons chargés de trouver une solution efficace pour la méthode d'étalonnage actuellement sous-développée pour les caméras dirigées par stéréovision sous l'eau. Nous avons déjà un projet qui a été réalisé par des étudiants de Master dans le domaine ; cependant, le cadre qu'ils ont développé n'utilise qu'une seule caméra, ce qui compromet peut-être la mesure correcte de la distance à la caméra et les dimensions de la gibbule, etc. examinées.
Selon les consignes données par notre professeur UE et les recherches individuelles menées par les membres de l'équipe, nous sommes arrivés à la conclusion prévisible qu'une deuxième caméra ajoutée au système pourrait nous fournir les données et la précision nécessaires - grâce à un moyen mis à jour d'étalonnage et une méthode pour mettre en œuvre deux caméras dans le boîtier étanche.
Dans cette page wiki, nous documenterons ce que nous avons fait lors de nos visites au Fablab, et développerons également nos recherches qui nous ont conduits aux décisions que nous avons prises.
Logs
Jour 1 - 23.02.2023
On s'est réunis à l'espace prototypage pour discuter sur l'implémentation de notre idée pour la stéréovision aux caméras.
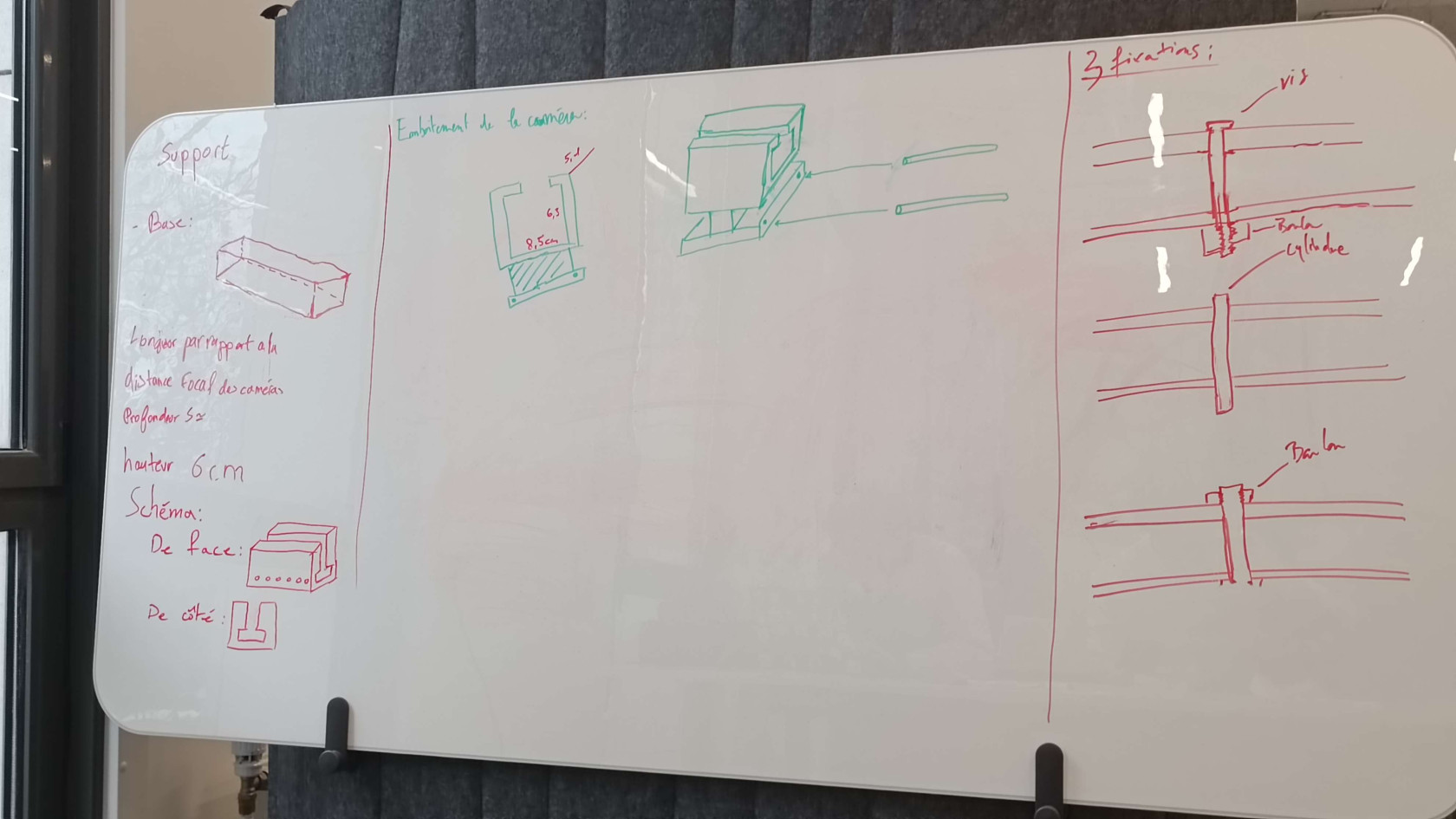
On pense à construire une boîte étanche et un support en PVC (en forme triangulaire). Pour le codage des caméras pour le traitement d'image, on a trouvé Raspberry Pi comme la meilleure solution, car il faudra examiner les photos dedans le boîtier et extraire tout de suite les valeurs voulus.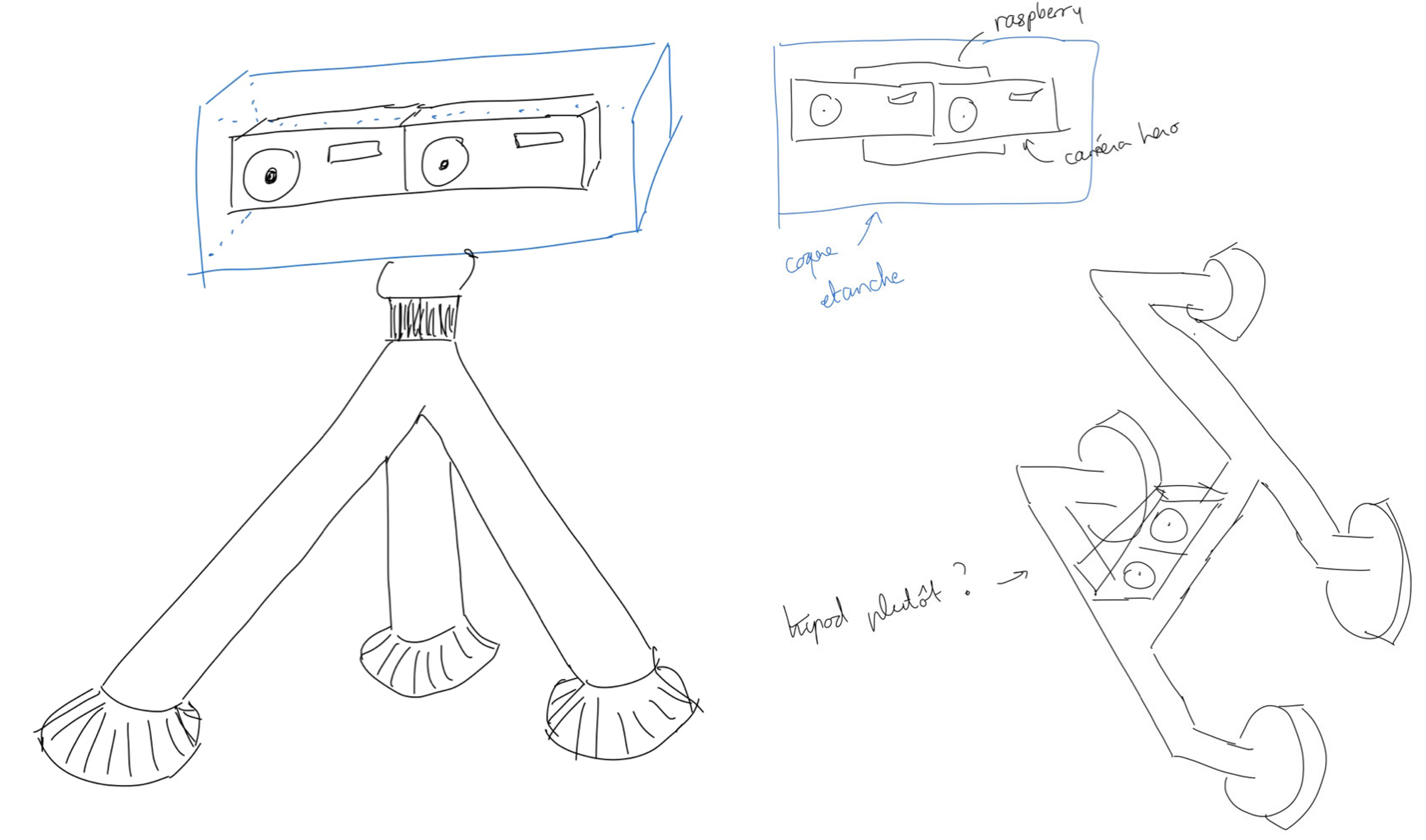
Jour 2 - 16.03.2023
| Liste de courses |
Prix |
Lien |
|
StereoPi camera |
66,54 |
https://www.antratek.com/imx219-83-stereo-camera |
|
Batterie externe 30000mAh |
44,99 |
https://www.boulanger.com/ref/1171871 |
|
WITTY PI 4 L3V7: REALTIME CLOCK AND POWER MANAGEMENT FOR RASPBERRY PI |
23,00 |
https://www.uugear.com/product/witty-pi-4-l3v7/ |
On a emprunté un Raspberry Pi 4 Computer modèle B, ecran pour Raspberry Pi, une carte micro SD et un câble HDMI vers mini-HDMI.
Explication des composants :
- Stereo camera : Double camera permettant de faire de la stereo-vision
Jour 1 (Groupe Yanis Saadi dit Saada, Victor YE, Jerome YU)
On s'est réuni au fablab pour schématiser et modéliser les supports nécessaires au calibrage des caméras.