| séquence envoyée | M3 G1S100F100 | M3 G1S400F100 | M3 G1S800F100 |
| PWM constaté | 10% | 40% | 80% |
| observation | [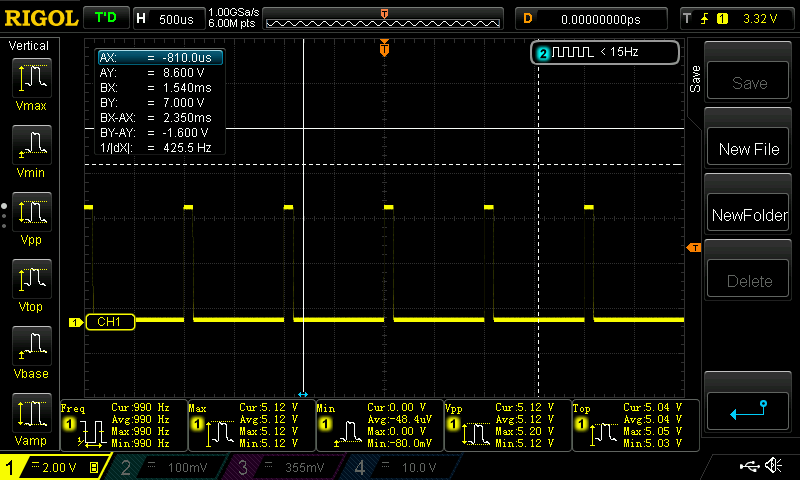](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2022-11/pwm-100.png) | [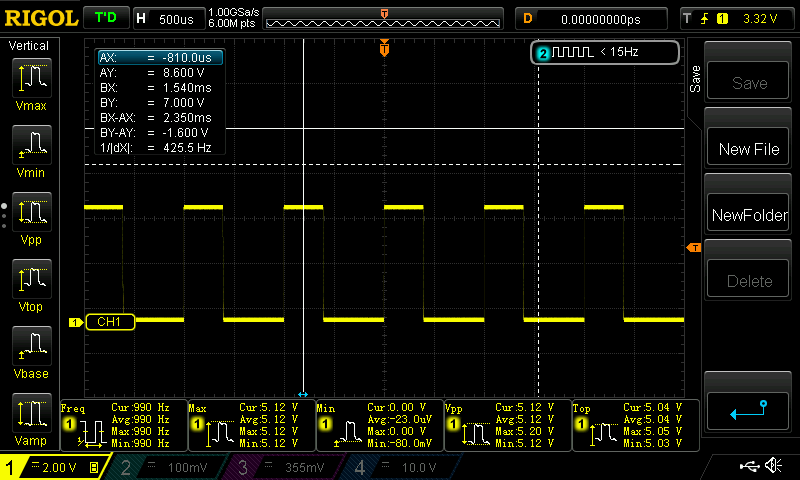](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2022-11/pwm-400.png) | [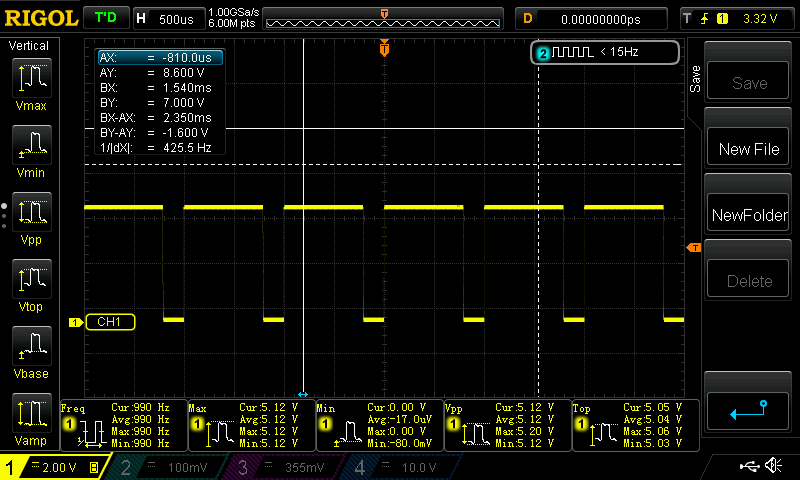](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2022-11/pwm-800.png) |