Projets divers
- Inventaire des Projets démonter - 2023
- Réalisation d'un panneau d'information avec la découpeuse Laser Trotect 360
- Boite pour cartes étudiantes (magasin)
- Création bande décorative Espace Biologie Chimie
- Rétro ingénieurie casque VR
- FEUILLES DE SAVON ET BOITES POUR LES RANGER
- Digital electro-microfluidic
- Création outil pour enlever les supports
- Digital electro-microfluids
- Projet Hephaïstos
- FabBOT 1.0
- Liste de projets été 2025
- Impression D'Assemblage Mécanique
- Degradation du PLA
- Réalisation de chaufferettes
- Cubes périodiques
- Electrodéposition sur Impressions Résines
- Référence principale : HEN3DRIK - Electroplating 3D Prints
- Mode d'emploi des imprimantes résines de l'espace chimie-bio
- Protocole
- Tableau périodique pour l'espace chimie-bio
Inventaire des Projets démonter - 2023
Inventaire des composant récupérer lors du démontage des projet.
20/07/2023:
3 x Arduino Motor Shield (2 x non déballer)
2 x Arduino Base shield
6 x Arduino uno ( 3 x non déballer)
3 x Grove analog Microphone (2 x non déballer)
3 x Grove Loudness Sensor ( 3 x non déballer)
1 x loudness sensor v0.9b (grove)
3 x relay (grove) HLS8L DC3V
1 x switch 2 position (grove)
1 x screw terminal (grove)
1 x LED socket kit (non deballe)
7 x M5Stack basic
1 x UART GPIO (ATMega328P)
3 x breadboard
mini breadboard
2 x grande breadboard
1 x Pir Motion Sensor
3 x Grove Temp&Humi Sensor
1x Mini PIR Motion Sensor
2 x I2C Hub
1 x bar LED (grove)
1 x led blue (grove)
1 x led green (grove)
1 x multicolor flash led (grove)
1 x chainable RGB V2.0 Led
Grove High Precision Barometer sensor
Grove 16x2 LCD
3 x MH MQ Sensor
Grove Light Sensor
Grove Gas sensor
Gas sensor
2 x Capteur de distance ultrason ( non déballer)
Water flow sensor
6 x Iduino relais
5 x pompe inconnue
esp32 feather
2 x Capteur de distance infrarouge
batterie avec 3 pile AAA
2 x Raille
super Glue
6 x cable usb type B
cable usb type c
cable usb micro type B
Cable en vrac
Viseri en vrac
2x connecteur d’alimentation
Composant électronique en vrac (led, photorésistance, etc)
Réalisation d'un panneau d'information avec la découpeuse Laser Trotect 360
Boite pour cartes étudiantes (magasin)
Création bande décorative Espace Biologie Chimie
Création bande décorative Espace Biologie Chimie
I- Choix du graphisme
Pour les images, plusieurs modèles ont été proposés :
Modèle de Flora Cadenet :
Lien jpg : https://dropsu.sorbonne-universite.fr/s/45GTbX7jrT2E5EH
Modèle du graphiste SU:
Lien jpg : https://dropsu.sorbonne-universite.fr/s/45GTbX7jrT2E5EH?
II-Image sur Insckape
A- Logo fablab espace biologie chimie
Sur Inkscape, nous avons vectorisé l'image suivante:

Le format de l'ensemble fichiers sera du SVG.
Cet écriteau sera affiché dans l'entrée de l'espace biochimie, les dimensions de l'image seront :
Hauteur : 70 cm
Largeur : 100 cm
B- Création des vagues mural
Une vague murale sera accrochée le long des murs de l'espace biologie Chimie. Nous avons créé plusieurs modèles pour que cela puisse correspondre à ce qui a été défini en réunion le 02/07/2024.
Nous nous sommes inspiré de ces trois modèles, nous avons vectorisé les images:



Les fichiers SVG seront mis dans le wiki.
Epaisseur de bande 10cm
Séparation de 3cm
Au total 36 cm de bande
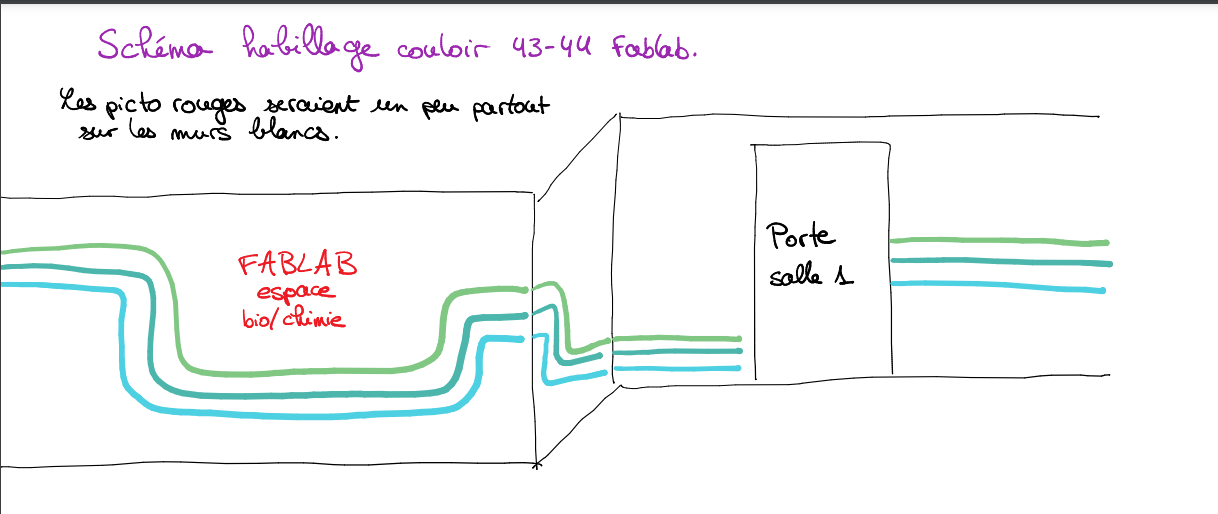
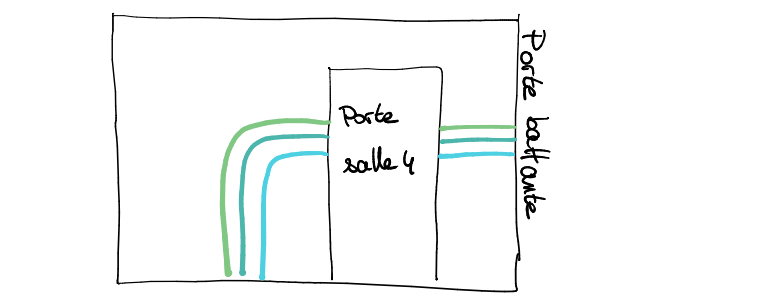
C-Plan d'affichage dans le fablab bio chimie
Un plan à été crée par Mbarik pour la décoration du fablab.

III- Découpe à la découpeuse vinyle
Dessin sur inkscape et calibration sur graphtec cutting pro.
A-Choix des couleurs
Nous avons choisi deux nuances de bleu et du vert, le rouge sera pour le logo du fablab.
B-Découpage du logo Fablab
Un logo officiel du fablab sera mis sur la porte blanche du couloir.
C- Découpe des bandes décoratives
Pour le quart de cercle et bande:
| Equivalence en cm | Ecran | Epaisseur bande |
| Grand quart de cercle | 49 | 10,25 |
| Milieu quart de cercle | 32,9 | 10,25 |
| Petit quart de cercle | 16,7 | 10,25 |
| Bande décorative | 6,67 | 10,25 |
Update du 12/07/2024:
- Installation de la bande bleu FSI
- Traçage et installation des 3 bandes sur le deuxième mur
- Installation de citations sur le mur voir fichier de Mbarik
- Installation de petite décoration voir proposition du graphiste et de Flora
Update du 05/03/2025 :
Nous avons créer un flocage pour les blouse de l'espace biologie chimie du fablab :

Image dessiner sur tablette, elle est à retoucher (par logiciel ou IA). Puis la convertir en SVG pour pouvoir la découper à la découpeuse vinyle.
Citation à mettre dans l'espace biologie chimie :
- Marie Curie (1867-1934, Physico-chimiste ) : "Dans la vie, rien n'est à craindre, tout est à comprendre"
- Louis Pasteur (1822-1895, Chimiste et biologiste ) : "Le hasard ne favorise que les esprits préparés."
- Barbara McClintock (1902-1992, Généticienne, Prix Nobel de Physiologie ou de médecine): "Si vous savez écouter, les réponses viendront d'elles-mêmes." ou bien "Si vous savez que vous êtes sur la bonne voie, si vous avez cette connaissance intérieure, alors personne ne peut vous détourner... peu importe ce qu'ils disent. Au fil des ans, j'ai trouvé difficile, voire impossible, d'amener une autre personne à réaliser l'existence de ses postulats quand par le biais de quelques expériences, j'en avais moi-même pris conscience… Il faut attendre le moment propice pour les changements de paradigme."
- Dorothy Crowfoot Hodgkin (1910-1994, Chimiste, Prix Nobel) : "Je suis tombé amoureuse des rayons X, et je suis réstée amoureuse d'eux toute ma vie."
Annexe:
Lien pour télécharger le Driver pour utiliser le découpeuse vinyle pour Windows : https://www.graphteccorp.com/download/gs2_w/
Rétro ingénieurie casque VR
- Nous sommes en possession d'un casque et de 2 manettes

Nous avons seulement utilisé un tourne vis pour démonter le casque
Pour le casque VR: https://fr.ifixit.com/Tutoriel/D%C3%A9montage+de+l'Oculus+Quest+2/139759
- Nous commençons par détacher à l'aide d'une lame la partie fixé du casque


- Nous dévissons les vis et on détache la partie extérieur,

- On dévisse encore les vis sur les cotés et on détache les pièces

FEUILLES DE SAVON ET BOITES POUR LES RANGER
Eden-Andréa et Rafael
Protocole:
Digital electro-microfluidic
Le but de ce projet est de faire une recette pour des microfluides au fablab.
Documentation
Pas de panique ! je réorganise juste !
Instant culture
Sources :
- Pour comprendre : https://blog.darwin-microfluidics.com/glossary/digital-microfluidics-microfluidics-explained/
- Pour comprendre ++ : https://en.wikipedia.org/wiki/Digital_microfluidics
Instant culture :


- La microfluidique est la science qui traite des écoulements de liquides dans des canaux de taille micrométrique. Il suffit qu’une dimension du canal soit de l’ordre du micromètre ou de la dizaine de micromètres pour que l’on commence à parler de microfluidique.
- Une puce microfluidique est un ensemble de micro-canaux gravés ou moulés dans un matériau. Ce réseau de micro-canaux enfermé dans la puce microfluidique est relié à l’extérieur par des entrées et des sorties percées à travers la puce, comme des interfaces entre le monde macro et micro.Par ces entrées et sorties ont injecte ou évacues les liquides ou les gaz a l'aide de systèmes actifs comme une pompe.
- Le PDMS, (polydiméthylsiloxane), est utilisé pour fabriquer ces puces pour sa simplicité d’usage et la facilité à établir des protocoles de fabrication contrôlés, de plus il permet de construire rapidement des prototypes
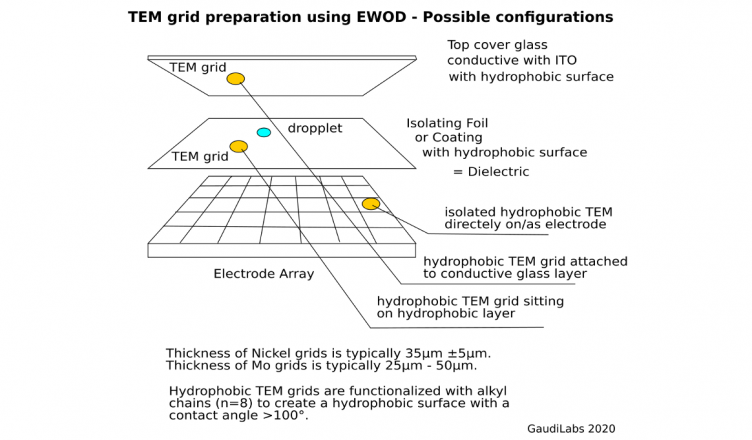
Sassi : De ce que j'en comprends, l'électro-microfluidique numérique est une sorte de domaine de la microélectronique, où on utilise des microgouttelettes (fluide à identifier) sur une surface hydrophobe/imperméable. Les microgouttelettes sont manipulés grâces à des électrodes sur un quadrillage.
 By Grisafi95 - https://commons.wikimedia.org/wiki/File:DMF_open_and_closed_system.pdf, CC BY-SA 4.0, https://commons.wikimedia.org/w/index.php?curid=79631238
By Grisafi95 - https://commons.wikimedia.org/wiki/File:DMF_open_and_closed_system.pdf, CC BY-SA 4.0, https://commons.wikimedia.org/w/index.php?curid=79631238
Comment ?
La surface de tension change en augmentant le voltage : la gouttelette s'écrase en partie, puis roule.
Equation de Young-Lippmann :

Remarque :
- Comme microgouttelettes, ne "mouille" pas la surface. Quasi 100% du liquide est réutilisée. C'est à cause de la tension de surface du liquide
- Faire un pile qu'on secoue avec le "Phénomène inverse" (cf : https://fr.wikipedia.org/wiki/%C3%89lectromouillage)
Pourquoi faire ?
Des utilisations dans la spectrométrie de masse, la colorimétrie, l'électrochimie, l'électrochimiluminescence
Au fablab spécifiquement ?
--> Jeux ?
-->
Recherches vrac
Fabrication
Marche pas trop ce 1er lien, trop imprécis
"For example, a closed PCB-based EWOD device manufacturing method was proposed to drive 1 μL droplet, and the manufacture of a dielectric layer (SU-8) and a hydrophobic layer (Teflon AF1600) on the PCB is completed by chemical vapor deposition (CVD) technology "
https://www.frontiersin.org/journals/physics/articles/10.3389/fphy.2020.00193/full
Exemple fait avec
Besoin :
- E‐beam evaporator
- Photolithography (avec plusieurs masques pour notre circuit)
- Using plasma‐enhanced chemical vapor deposition (PECVD)
Information trouve pour la conception de la PCB (Alexa):
Pour le couche de revêtement (Dielectric layer):
- Parylene
- Silicone dioxyde
- Kapton
Pour connaître plus sur les matériaux de la couche insolant (Guide de comment choisir le matériaux diélectrique):
https://www.proto-electronics.com/blog/how-to-choose-your-pcb-dielectric-material
Pour la couche hydrophobique:
- PDMS
- Aquapel® ou silanization (Pour reinforcer)
- Cytonix Fluoropel
Les matériaux utilisés dans OpenDrop ont les spécifications suivantes:
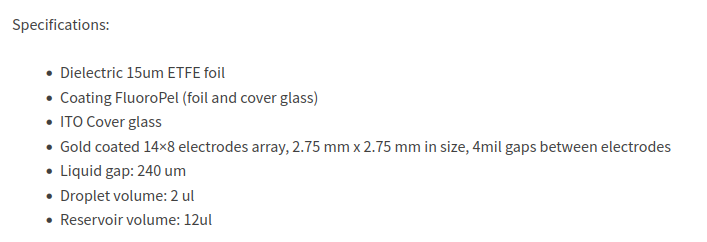
http://www.gaudi.ch/OpenDrop/?p=544
"The cartridge is composed of multiple layers. Laminated to the electrode array circuit board is a ETFE foil coated with a hydrophobic coating FluoroPel PFC1601V from Cytonix. The conductive ITO glass is attached to the board though double sided adhesive with the exact thickness of the liquid gap. A frame and top cover protect and hold in place the top cover glass."
Info sur les materiaux hydrophobiques et leur utilisation dans les puces microfluidiques : https://blog.darwin-microfluidics.com/glossary/hydrophobic-microfluidic-explained/
https://blog.darwin-microfluidics.com/hydrophilic-and-hydrophobic-coatings-for-droplet-generation/
Pour le liquide utilise:
https://gaudishop.ch/index.php/product/digital-liquid-5ml/
Ingredients:
- 1.5ml Propylenglycol
- 3.5ml Distilled Water
- 10ul Silicon Oil 5cSt
- 175ul Ink

Pour la conception de la PCB:
Options possibles :
Or (Au) → Excellente conductivité et stabilité, mais coûteux
Platine (Pt) → Très stable et durable, mais cher et légèrement plus résistant que l’or.
Palladium (Pd) → Bonne alternative mais peut se dégrader chimiquement à long terme.
Nitrure de titane (TiN) → Bonne durabilité, coût raisonnable, mais conductivité légèrement inférieure à l’or.
Effets du choix du revêtement :
Moindre conductivité (ex: TiN, Pd) → Nécessite des tensions plus élevées.
Moins de stabilité chimique (ex: Pd) → Dégradation plus rapide des électrodes.
Mauvaise mouillabilité (ex: Pt) → Nécessite un revêtement hydrophobe (ex: Teflon-AF).
Coût inférieur (ex: TiN, Pd) → Possible, mais nécessite des couches protectrices supplémentaires.
Le nitrure de titane (TiN) avec un revêtement hydrophobe (ex: Teflon-AF) semble être une bonne option en raison de sa durabilité et de son coût modéré.

https://www.frontiersin.org/journals/physics/articles/10.3389/fphy.2020.00193/full
https://www.youtube.com/watch?v=Mpo1P5eEUU8
Faite avec un PLA conducteur et parafilm et huile d silicone
https://www.youtube.com/watch?v=tDuUhBvmfzw
Plus concis / Résumé ?
Plus concisement:
Pour le substrate:
- On peut utiliser du verre, FR4, ou PDMS (celle utilise dans OpenDrop)
Pour le revetment conducteur:
- ITO (Indium Tin Oxide)
- Or (plus cher utilise dans OpenDrop)
- Tin (Nitrute du Titane)
Pour la couche dielectrique:
- Parylene
- Silicone
- Teflon
Pour la couche hydrophobique:
- Cytop (Fluoropolymer Coating)
- Teflon AF
- Spin-coated PDMS
Machines a utiliser:
Équipement de fabrication de PCB :
- Fraiseuse CNC (ex. : Bantam Tools, Othermill) – Pour graver les pistes du PCB.
- Découpeuse laser – Si le substrat en polymère.
- Installation de photolithographie – Pour réaliser des pistes conductrices ultra-fines avec photomasque et processus de gravure.
Équipement de dépôt :
- Dépôt par pulvérisation cathodique (sputtering) ou évaporation thermique – Pour le dépôt d'ITO ou de métal.
- Dépôt chimique en phase vapeur (CVD) – Pour l'application d'une couche diélectrique en Parylène-C.
- Spin coater – Pour un revêtement uniforme en Cytop ou Teflon.
Quelles machines pr ça ?
Gravure et traitement de surface :
- Gravure chimique humide (Chlorure ferrique, CuCl₂ ou solution d'attaque pour ITO) – Si on utilise des méthodes de PCB soustractives.
- Nettoyeur plasma (O₂ Plasma ou CF₄ Plasma) – Pour améliorer l'adhésion de surface et nettoyer les couches hydrophobes.
Quelles machines pr ça ?
Tests électriques et inspection :
- Multimètre & Oscilloscope – Pour vérifier la connectivité et l'isolation diélectrique.
- Goniomètre d'angle de contact – Pour mesurer la mouillabilité et assurer de bonnes performances en électromouillage.
Aperçu du processus :
- Préparer le substrat – Découper le verre ou le matériau PCB.
- Déposer la couche conductrice – Pulvérisation cathodique, impression ou fraisage CNC.
- Appliquer la couche diélectrique – Spin coating ou CVD pour l'isolation.
- Appliquer le revêtement hydrophobe – Cytop, Teflon AF ou PDMS.
- Structurer les électrodes – Photolithographie, gravure ou fraisage.
- Tester et optimiser – Mesurer les angles de contact et la réponse en tension.
J'essaie ds la partie qui suit de restructurer un protocole qu'on pourrait suivre tout de suite. Pour qu'on voit dès à présent ce qu'il nous manque.
Protocole
Pas hésiter à mettre info complémentaires au dessus, et à dire "cf partie recherche vrac ou quoi"
Matériel
Machines
Fabrication PCB
- Découpe laser (Trotec speedy 360 ? LPKF protolaser ?)
- Fraiseuse (LPKF protolaser ?)
- Photolithographe ? (on n'en a pas ?)
Équipement de dépôt
- Dépôt par pulvérisation cathodique (sputtering) ou évaporation thermique
- Dépôt chimique en phase vapeur (CVD)
- Spin coater On n'a pas tt ça si ?
Gravure et traitement de surface
- Gravure chimique humide (Chlorure ferrique, CuCl₂ ou solution d'attaque pour ITO) (Si on utilise des méthodes de PCB soustractives, ==>> Faire variantes du protocole alors !!!)
- Nettoyeur plasma (O₂ Plasma ou CF₄ Plasma) – (Pour améliorer l'adhésion de surface et nettoyer les couches hydrophobes)
Tests électriques et inspection
- Multimètre & Oscilloscope (Pour vérifier la connectivité et l'isolation diélectrique)
- Goniomètre d'angle de contact (Pour mesurer la mouillabilité et assurer de bonnes performances en électromouillage)
Support
- Substrat : verre, FR4 ou PDMS [1]
- Revêtement conducteur : ITO (Indium Tin Oxide), Or (plus cher utilise dans OpenDrop), ou Tin (Nitrute du Titane) [2]
- Couche diélectrique : Parylene, Silicone, ou Teflon [3]
- Couche hydrophobique : Cytop (Fluoropolymer Coating), Teflon AF, ou Spin-coated PDMS [4]
[1] : spécificités - à commander ?(si oui, prix ?) - Epaisseur ? - Lequel on choisi et pourquoi (cf Recherche en vrac)? Adapté à nos machines ?
[2] : spécificités - à commander ?(si oui, prix ?) - Epaisseur ? - Lequel on choisi et pourquoi ? Adapté à nos machines ?
[3] : Pareil ;
[4] : Pareil ;
Protocole
1- Préparer le substrat
Qu'est-ce qu'on fait dans cette partie précisément ??
Exporter un PCB depuis kiCad, le mettre ds LPKF, faire le circuit imprimé ?
2- eme part
3- eme part
4- eme part
Cahier des charges
Contraintes :
Prix - max 100€ ?
Dimension -
Durabilité -
Objectif : Pouvoir déplacer des microgoutelettes
Réalisation
Marque l'avancée du projet, comment il s'est réalisé, quels approximations ont été faites, retour sur nos attentes et le résultats fini
Création outil pour enlever les supports
Introduction
Lors des impressions 3D des supports sont créés et doivent être enlevé. Dans la continuité de vouloir créer des outils en PLA (comme les spatules pour retirer les impressions, car elles attaquent moins le PLA ou le plateau que les outils en métaux), on conçoit maintenant un outil pour enlever les supports.
Conception
Voici une image de l'outil sur OpenScad.

Voici le code sur OpenScad.
$fn=100;
module cy1(){
rotate([0, 90, 0]) cylinder(20,1,1, center = true,$fn=8);
};
module cy2(){
translate([10,0,0]) rotate(a = [0, 90, 0]) cylinder(3,1,0,$fn=8);
};
module cy3(){
hull() {
translate([-10,0,0]) rotate(a = [-19, 90, 180]) cylinder(3,1,0,$fn=8);
translate([-10,0,0]) rotate(a = [19, 90, 180]) cylinder(3,1,0,$fn=8);};
};
module outil(){
rotate([22.5, 0, 0]) hull(){
cy1();
cy2();
cy3();};
};
outil();Et enfin, voici les fichier en question :
Avant de slice, modifier la longueur en 120mm (garder la même échelle). Le remplissage a été établie à 30% et nid d'abeille 3D.
Résultat

Les pointes et la solidité de l'outil sont satisfaisant. On aurait pu prendre un remplissage moins élevé.
A faire
- Logo fablab
- Arrondir angle
- Ne pas utiliser de papier de verre ! (rendu chaotique)
Bilan
Les 2 pointes de l'outils se sont détériorées assez rapidement. Je privilégierai les outils en métaux, plus résistants à la contrainte.
Il se peut que ce soit la qualité du filament qui aie fait défaut, mais ce cas reste peu probable.
Digital electro-microfluids
Instant culture :
- La microfluidique est la science qui traite des écoulements de liquides dans des canaux de taille micrométrique. Il suffit qu’une dimension du canal soit de l’ordre du micromètre ou de la dizaine de micromètres pour que l’on commence à parler de microfluidique.
- Une puce microfluidique est un ensemble de micro-canaux gravés ou moulés dans un matériau. Ce réseau de micro-canaux enfermé dans la puce microfluidique est relié à l’extérieur par des entrées et des sorties percées à travers la puce, comme des interfaces entre le monde macro et micro.Par ces entrées et sorties ont injecte ou évacues les liquides ou les gaz a l'aide de systèmes actifs comme une pompe.
- Le PDMS, (polydiméthylsiloxane), est utilisé pour fabriquer ces puces pour sa simplicité d’usage et la facilité à établir des protocoles de fabrication contrôlés, de plus il permet de construire rapidement des prototypes.
https://www.youtube.com/watch?v=o9n0tfutOp4
https://www.gaudi.ch/GaudiLabs/?page_id=392
https://www.youtube.com/watch?v=srezdlbTQnU
Projet Hephaïstos
Félicitations ! Vous avez trouvé le fichier à graver pour révéler l'indice lié à la découpeuse laser.
Téléchargez le fichier : cache_laser-02.svg
Et positionnez le tout correctement pour compléter la gravure de la plaque et la rendre lisible.
FabBOT 1.0
Le projet FabBOT 1.0 a été déplacé et se trouve désormais ici : https://wiki.fablab.sorbonne-universite.fr/BookStack/books/emplois-etudiants/chapter/fabbot-10
Liste de projets été 2025
Documentation des projets
Nous aimerions tester une nouvelle manière de documenter un projet au fablab à l'aide des IA. Pour les projets suivants, l'idée est donc de prendre des notes très simples dans un logiciel de prise de notes basique, au fur et à mesure que le projet avance et de donner le tout à une IA pour qu'elle rédige une belle documentation à copier-coller directement dans le wiki.
Une fois le projet terminé et les notes prises, utiliser le prompt suivant :
Tu es un assistant spécialisé dans la documentation technique pour les fablabs. À partir des notes brutes fournies par l’utilisateur, tu dois générer une documentation claire, structurée et illustrée selon le modèle utilisé sur le wiki Bookstack du fablab.
La documentation doit inclure les sections suivantes :
Nom du projet
Coordonnées (nom, prénom, mail, cursus ou laboratoire)
Introduction (date de début, date de fin estimée ou réelle, objectifs, contexte du projet)
Matériaux, outils et machines utilisés (détailler les références, paramètres, logiciels, fournisseurs, etc.)
Construction et réalisation (fichiers utilisés, étapes, photos, captures d’écran, code, paramètres d’usinage, remarques techniques)
Journal de bord (facultatif, mais à inclure si le projet s’étale sur plusieurs jours)
Si certaines informations sont absentes ou incomplètes, pose des questions claires et numérotées à l’utilisateur à la fin du texte, pour l’aider à les compléter.
Ajoute également des annotations entre crochets là où des éléments visuels ou fichiers sont attendus, par exemple :
[ajouter photo du montage]
[insérer lien vers fichier STL]
[capture d’écran des logiciels utilisés]Ton objectif est de produire une documentation propre, lisible, utile à d'autres utilisateurs du fablab, tout en aidant l’utilisateur à gagner du temps.
Projet réalisation de boîtes à la laser
Objectif : le but de ce projet est de créer une documentation complète sur comment réaliser une boîte en contreplaqué ou en PMMA à la laser. La création de boîtes ou de boîtiers est un classique et une page sur le wiki serait particulièrement utile.
Etapes de réalisation du projet
- Faire un recensement puis un comparatif de sites générateurs de boîtes (comme http://festi.info/boxes.py)
- Rendu : une page wiki
- Faire une documentation sur la réalisation d'une boîte classique de A à Z
- Expliquer comment utiliser le générateur de boîtes
- Faire attention au kerf, comment faire des tests pour l'assemblage
- Personnalisation sous Inkscape
- Rendu : une page sur le wiki qui soit rédigée, avec des photos et des captures d'écran + la boîte réalisée
- Faire une documentation sur la réalisation d'une boîte un peu plus complexe avec un un couvercle ou des bords arrondis par exemple
- Rendu : une page sur le wiki qui soit rédigée, avec des photos et des captures d'écran + la boîte réalisée
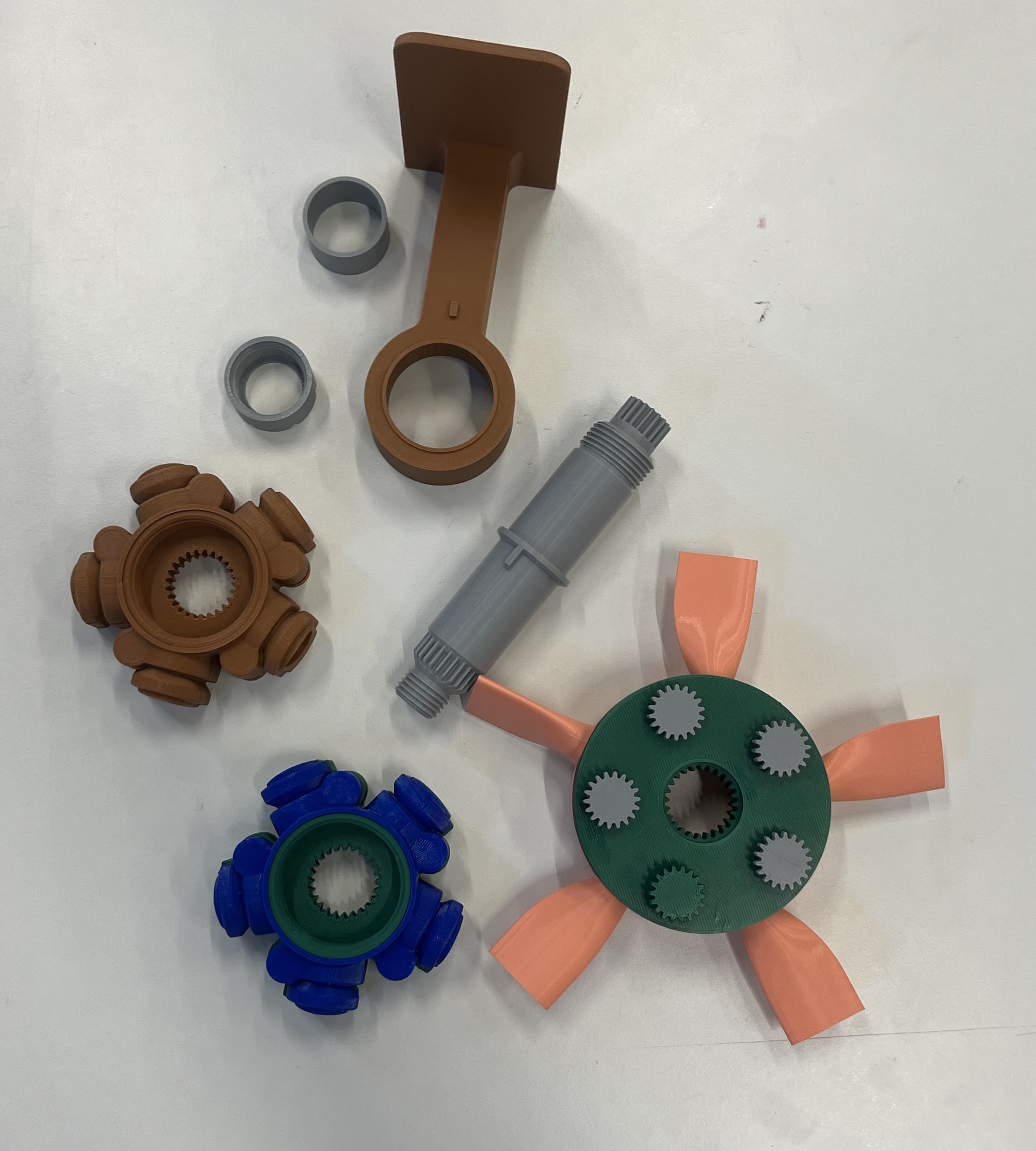
Projet de réalisation d'un mécanisme imprimé en 3D
Objectif : imprimer un mécanisme motorisé complexe pour montrer les possibilités offertes par l'impression 3D.
Etapes de réalisation du projet
- Chercher un modèle intéressant sur printables.com ou thingiverse.com et le faire valider par Stéphane :
- Lancer les impressions
- Assembler le projet en documentant les étapes, ce qui fonctionne et ce qui ne fonctionne pas
- Rendus : une page wiki et le mécanisme assemblé
https://www.printables.com/model/282774-variable-pitch-propeller-mechanism/files Validé par Stéphane, les pièces à imprimer sont sur le bureau de l'ordinateur Rosalind Franklin (emploi étudiant).
Merci d'indiquer à côté des pièces déjà imprimées "imprimé"
Projet de modélisation d'éléments mécaniques
Objectif : créer une bibliothèque de modèles paramétriques ou ajustés à des éléments disponibles au fablab (moteurs, profilés en alu...) dans Fusion 360.
Impression D'Assemblage Mécanique
Iryna Pavliuk
Tiago Garandy
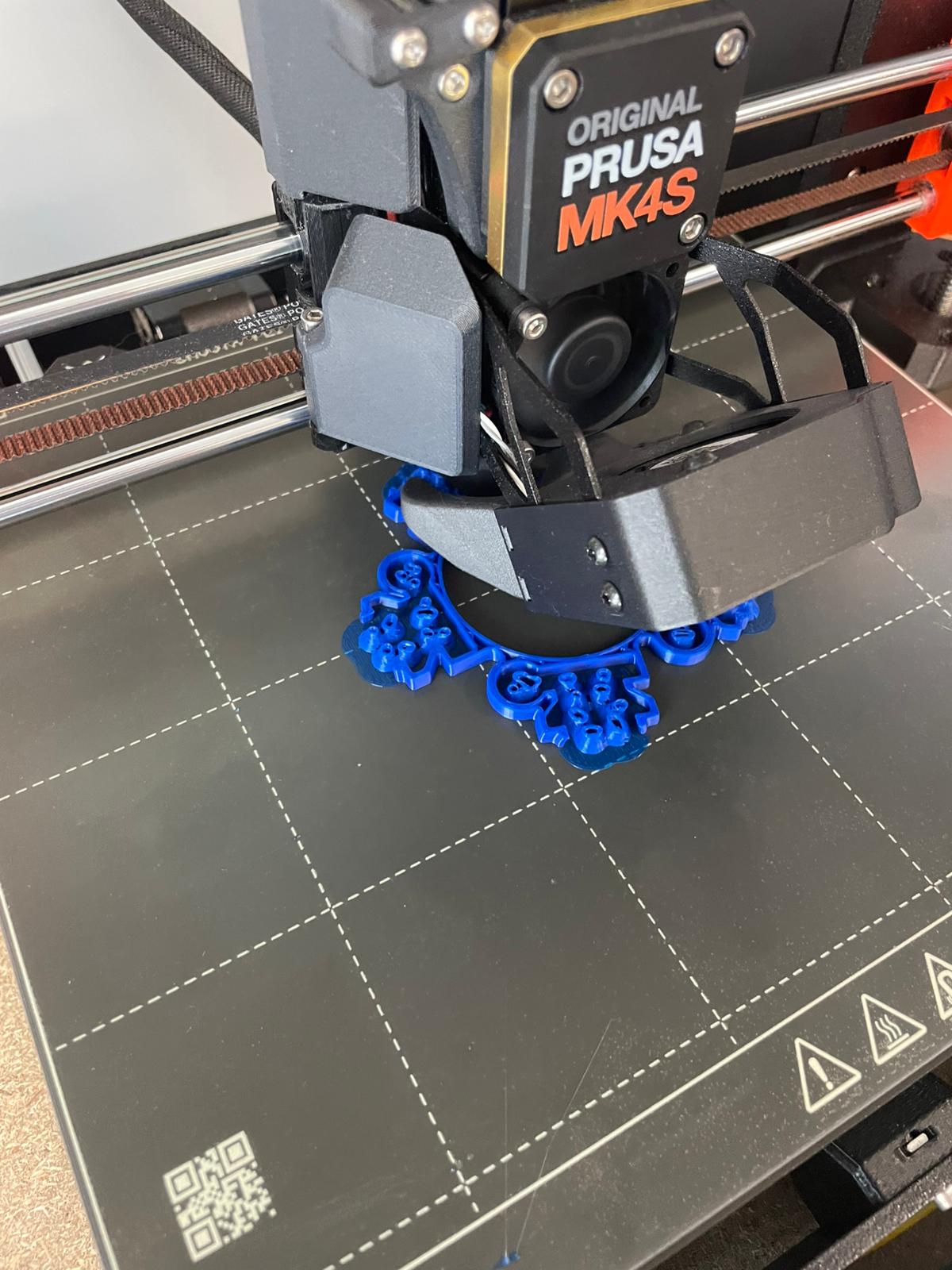
Projet : Mécanisme d’Hélice à Pas Variable
1) Choix du projet
Nous avons choisi ce projet afin d’explorer pleinement les capacités de l’imprimante 3D et de mettre en valeur les possibilités offertes par l’impression 3D dans la fabrication de mécanismes complexes.
Lien du modèle utilisé : Variable Pitch Propeller Mechanism – Printables
2) Préparation des fichiers
Les fichiers téléchargés étaient initialement conçus pour une imprimante Prusa MK3. Nous les avons donc ouverts dans PrusaSlicer, puis re-tranchés (re-slicés) en fonction des spécificités de notre machine, une Prusa MK4S.
3) Lancement de l’impression
Une fois les fichiers adaptés, nous avons lancé les impressions des différentes pièces du mécanisme.
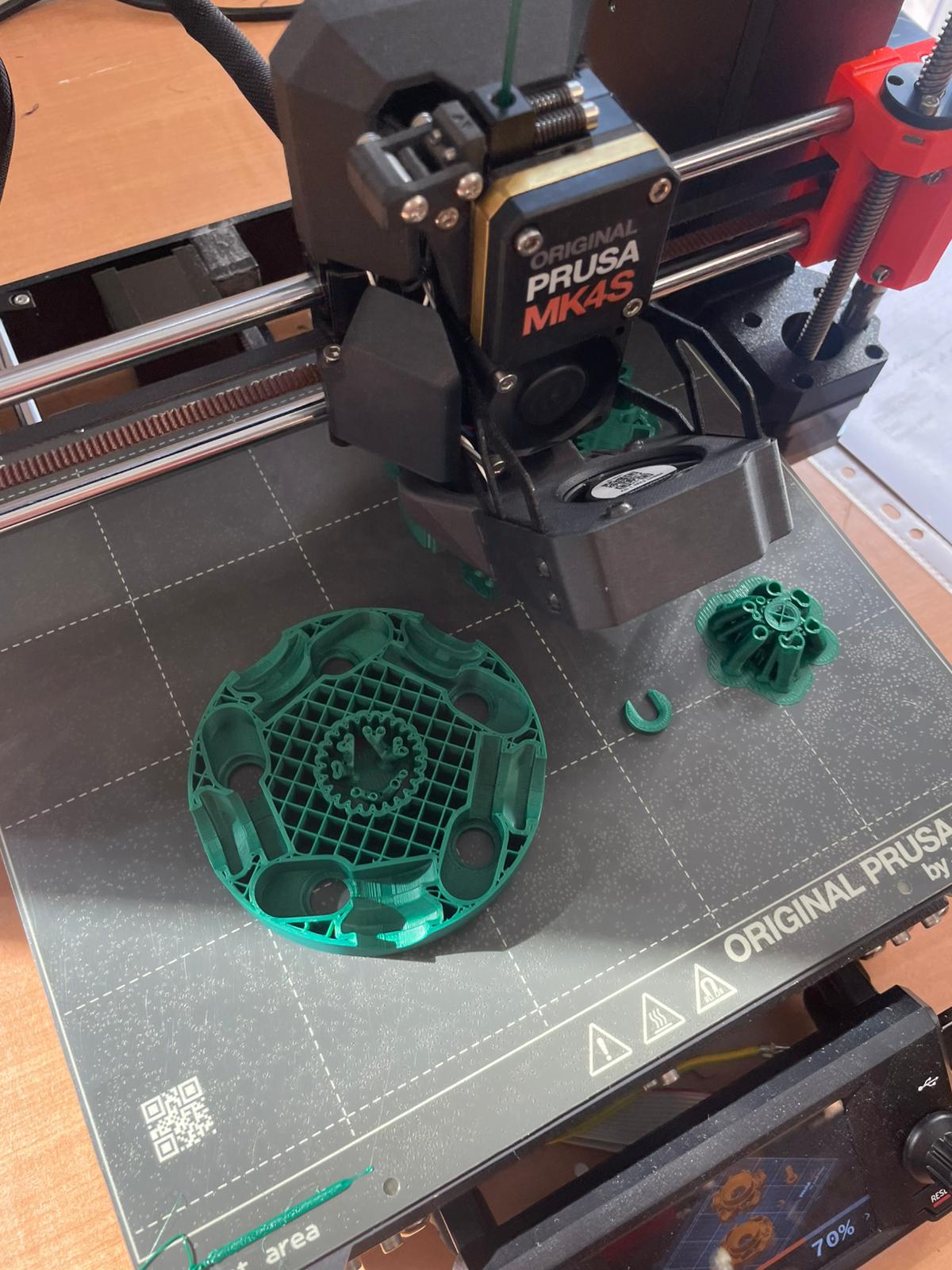
4) Pre-Assemblage
Nous avons regardé le tutoriel réalisé par le responsable du projet (lien YouTube) et suivi le manuel afin de mieux comprendre l'ensemble du projet.

Degradation du PLA
Study of PLA pre-treatment, enzymatic and model-compost degradation, and valorization of degradation products to bacterial nanocellulose
https://pmc.ncbi.nlm.nih.gov/articles/PMC10110681/
Fungal PLA degraders are: Ascomycota and Basidiomycota (Satti et al. 2017)
Actinobacteria: Amycolatopsis and Actinomadura as the most potent genera (Pranamuda and Tokiwa 1999)
Bacillaceae
The PLA-degrading enzymes, classified as alkaline proteases, are secreted from Bacillus species (Butbunchu and Pathom-Aree 2019; Oda et al. 2000a; Tokiwa and Calabia 2006).
PLA depolymerases: protease-type and lipase-type, cutinases.
Degradation of commercial biodegradable plastics and temporal dynamics of associated bacterial communities in soils: A microcosm study
https://pubmed.ncbi.nlm.nih.gov/36581270/
Degradation of polylactic acid/polybutylene adipate films in different ratios and the response of bacterial community in soil environments
https://pubmed.ncbi.nlm.nih.gov/36115492/
Microbial Allies in Plastic Degradation: Specific bacterial genera as universal plastic-degraders in various environments
https://pubmed.ncbi.nlm.nih.gov/39067822/
Pseudomonadota, Bacteroidota, Actinomycetota, Bacillota.
Comparing the bacterial composition, succession and assembly patterns in plastisphere and kitchen waste composting with PLA/PBAT blends
https://pubmed.ncbi.nlm.nih.gov/37098293/
Profiling of the bacterial community and the degradative capability of newly isolated poly(lactic acid) (PLA)- and poly(butylene succinate) (PBS)-degrading bacteria from coastal samples
https://pubmed.ncbi.nlm.nih.gov/40978322/
thermophilic bacteria, Brevibacillus, Pseudomonas, Pseudoalteromonas, Psychrobacter.
Biodégradabilité des plastiques biosourcés : revue bibliographique sur l’acide polylactique
https://www.mattech-journal.org/articles/mattech/pdf/2022/06/mt220040.pdf
Biodegradation of polylactic acid by a mesophilic bacteria Bacillus safensis
https://pubmed.ncbi.nlm.nih.gov/36716940/
Bacillus safensis PLA 1006: produce protease and lipase
Exploring the potential of earthworm gut bacteria for plastic degradation
https://pubmed.ncbi.nlm.nih.gov/38575018/
Transcriptomic analysis of PLA-degrading bacteria Brevibacillus brevis grown on polylactic acid
Transcriptomic analysis of PLA-degrading bacteria Brevibacillus brevis grown on polylactic acid
Brevibacillus brevis : carboxylesterase, lipase, cutinase, and serine protease
Réalisation de chaufferettes
Dans le cadre de la préparation d'un atelier pour le public, l'idée de la réalisation de chaufferettes est ressortie.
Une chaufferette est une pochette d'une solution aqueuse sursaturée d'acétate de sodium (CH3COONa), avec une pastille métallique à l'intérieur. Lorsque celle-ci est pliée, elle claque. Le choc résultant permet la solidification de la solution, et de la chaleur se dégage.
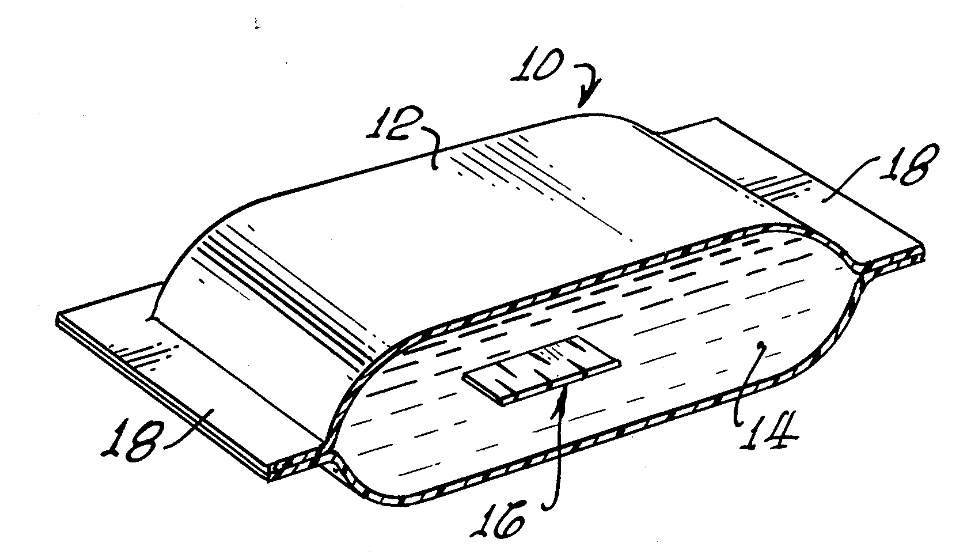
Fig 1 : Section en perspective d'une chaufferette issue du brevet [1]
La solidification
Grosso-modo c'est la transition d'un système de la phase liquide vers la phase solide. Généralement elle se produit lors d'une baisse de température ou d'une hausse de pression. Lors du passage liquide vers solide, les molécules (=petites particules de matière) établissent des liaisons plus fortes entre elles et fixent leur position. Ces molécules, qui étaient (presque) libres de leurs mouvements et de vibrer grâce à l'énergie qu'elles contiennent s'en voient privées. De l'énergie se dégage alors du système. Lors d'un changement de phase, la température du milieu reste constante. En effet refroidir un milieu est équivalent à en soustraire de l'énergie thermique. Cette énergie soustraite correspond donc à l'énergie libérée lorsque les molécules se fixent à leur place et que la phase solide se forme. Une fois la solidification complète, la diminution de la température reprend.
La surfusion
La réaction utilisée dans les chaufferettes est due au phénomène de surfusion. Le système, lorsqu'il est à température ambiante, est métastable. C'est à dire qu'il existe un autre état plus stable (= de plus basse énergie), l'état solide. Le milieu reste liquide puisqu'il existe une barrière d'énergie, dite énergie d'activation, suffisamment élevée pour le "piéger" sous forme de solution.
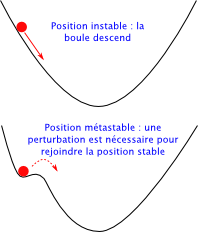
Fig 2 : illustration d'un puits d'énergie dans le cas d'un système instable et d'un système métastable.
(https://scienceetonnante.com/blog/2011/04/11/la-surfusion-de-leau-cest-supercool/)
Une perturbation est nécessaire pour passer cette barrière d'énergie et permettre la solidification. Pour des chaufferettes, la perturbation correspond à un choc mécanique crée par la pastille métallique lors de sa flexion. Une fois la barrière passée, le système se solidifie. Dans le cas étudié, une solution sursaturée d'acétate de sodium (CH3COONa), le système relâche un grand surplus d'énergie sous forme de chaleur. C'est chaleur qui fait tout l'intérêt de ces chaufferettes.
Une telle surfusion permet aussi d'illustrer une condition nécessaire à la solidification d'un liquide : la présence d'un germe. Les molécules en phase liquide ont besoin d'un point d'appui, un germe, pour passer en phase solide. Il peut s'agir d'autres molécules en phase solide, d'une interface avec un autre matériau (de préférence rugueux) ou même d'une impureté. A partir de ce point, localement le liquide va pouvoir s'organiser dans la géométrie da la phase solide. Le changement de phase se fait alors progressivement dans toutes les directions possible depuis le germe.
Expériences menées
- Mélange de 100 g d'acétate de sodium tri hydraté (CH3COONa + 3H2O) dissous dans 35 mL d'eau dans un ballon. Le mélange est agité et amené à 60°C pour s'assurer de la dissolution complète. Le mélange est ensuite refroidi dans un bain d'eau avec de la glace, jusqu'à 25°C. D'autres test ont été menés après refroidissement jusqu'à 15°C et 0°C. En utilisant le thermomètre pour tapoter une paroi intérieure du ballon, un germe se forme. Il permet alors la solidification de la solution et le dégagement de chaleur à été mesuré de l'ordre de +20°C dans le milieu. A noter que le germe n'apparait pas forcément au point de contact entre la pointe du thermomètre et le ballon. Peut-être se forme-t'il à cause des vibrations dans le ballon issu du choc ? Par ailleurs, une solidification spontanée s'est déclenchée aux alentours de 28°C lors d'un refroidissement. Celle-ci pourrait s'expliquer par la présence d'un objet servant de germe dans la solution : une impureté, ou un élément mal dissous.
- Il semble que la quantité d'eau minimale à ajouter pour la dissolution soit de 20 mL, pour s'assurer que tout le solide soit mouillé. Dans ce cas, l'augmentation de température a été mesurée à +30°C. Les résultats sont les même pour la dissolution de 50g de solide dans 10 mL d'eau.
Avec 50 g de CH3COONa et 20 mL d'eau :
- La solution est laissée une nuit en phase liquide dans un ballon avec bouchon percé. Celle-ci s'est solidifiée durant la nuit certainement à cause de l'évaporation : moins il y a d'eau, plus la solidification spontanée est facile. 20 mL d'eau ont du être rajoutés pour dissoudre à nouveau.
- La solution est laissée 6 nuits en phase liquide dans un ballon avec bouchon percé et recouvert d'un papier mouillé (celui-ci trempe dans un cristallisoir avec de l'eau). Le système est resté liquide. Après avoir retiré la papier, la solution s'est solidifiée spontanément à la moindre agitation du ballon. Il y a tout de même eu moins d'évaporation que dans le cas précèdent. 10 mL ont du être rajoutés pour re-solubiliser l'ensemble.
Refs :
[1] : J. Stanley et al. REUSABLE HEAT PACK CONTAINING SUPERCOOLED SOLUTION AND MEANS FOR ACTIVATING SAME, United States Patent, 1978
Cubes périodiques
Réalisation de cubes en gravures laser pour les éléments du tableau périodique
Design des cubes
L'idée est de réaliser des petits objets (vaguement) décoratifs et personnalisables évoquant les éléments du tableau périodique. Il n'est bien sur pas question de réaliser les 118 connus, car la santé mentale prime ! Il s'agit surtout de faire de petits objets de vulgarisation scientifique, tout en évoquant les deux espaces du Fablab. A l'avenir, je souhaiterais utiliser d'autres méthodes (typiquement l'impression 3D) disponibles de l'espace prototypage, ou même d'autres plus atypiques afin d'évoquer les propriétés chimiques des différents éléments.
 Cubes pour le Lanthane (La , Z=57) et le Bore (B, Z=5) réalisés avec des chutes de MDF lisse.
Cubes pour le Lanthane (La , Z=57) et le Bore (B, Z=5) réalisés avec des chutes de MDF lisse.
Gravure Laser
Les premiers cubes ont été réalisés par gravure laser avec la Trotec ruby de la salle expert de l'espace prototypage. Seules des chutes, généralement de MDF (medium-density fiberboard ou panneau de fibres à densité moyenne) naturel (3mm) ont été utilisées. Le résultat après gravure, notamment la couleur après le passage du laser change avec le matériau utilisé. Des échantillons réalisées par Lou Bervin sont disponibles en prototypage.
La gravure laser nécessite notamment d'utiliser un logiciel de design 2D comme inkscape.
Création du modèle dans inkscape

Le modèle (Flérovium - Fl) ci-contre est celui envoyé pour la gravure. Les éléments en rouges (bordures des face et de la base du cube) vont être découpées et ceux en noir seront gravés. Le "patron" du cube à été généré grâce au site https://boxes.hackerspace-bamberg.de, permettant faire divers formats de boites prêtes à la gravure. Les dimensions d'un des coté sont ci-dessous (en mm) :

Les faces contiennent toutes une information en rapport avec l'élément en question :
- Symbole et nom (ici en anglais)
- Modèle de Bohr : répartition des électrons (chargés -) dans les orbitales autour du noyau (chargé +). Le modèle en lui-même est désuet mais plus facile à comprendre que la chimie quantique et approprié pour de la médiation
- Noms dans différentes langues : chinois, arabe, français, espagnol et russe
- Numéro atomique : le nombre d'électrons
- Découvreur.se et date de découverte
Les textes en noir sont fait sur canva (police meteoritika) puis une copie d'écran est importé dans inkscape. Celle-ci est vectorisée puis placée dans la case voulue. Le modèle de Bohr est fait grâce à un programme en python (voir les autres pages du chapitre de cette page) : avec le numéro atomique en entrée, renvoie le modèle associé et sauvegarde un png de l'image dans le dossier actif. L'image suit alors le même traitement.
Résultats de gravure (MDF naturel)
 |
 |
 |
 |
 |
 |
Implémentation en python
Dans l'idée de rendre le process plus rapide (petite flemme de faire tout à la main quand même) et par curiosité, j'ai décidé de faire abstraction de mes compétences plus que douteuses en programmation. J'ai donc réalisé un programme (voir les autres pages du chapitre de cette page). Celui-ci ouvre une fenêtre de la forme du tableau périodique avec des cases cliquables. Il créé alors un fichier inkscape avec les données relatives aux éléments.
 |
 |
Il reste encore un peu de traitements à faire pour ordonner les éléments et avoir un modèle prêt à graver : La police utilisée, définie dans le programme doit exister dans inkscape. A mon grand désarroi, je n'ai pas trouvé meteoritika, j'ai donc choisi Bauhaus 93. Il est cependant tout à fait possible de changer la police même pour une seule entité textuelle. De plus la case concernant la découverte n'est pas réalisée. En effet les données pour chacun des 118 éléments connus (symbole, numéro atomique et nom dans les différentes langues ) sont contenus dans une liste générée par chatgpt. A vrai dire il n'est même pas garanti que les 6*118 = 708 noms soient tous correct. Je ne pense donc pas qu'il soit judicieux de demander à l'ia d'y ajouter la date de découverte et l'heureux.se découvreur.se. Mais je suppose que ça fait un coté parfaitement personnalisable ;) .

Résultats de gravure (MDF naturel)
 |
 |
 |
 |
 |
Python : modèle de Bohr
Ce programme crée le graphique du diagramme de Bohr en fonction d'un nombre d'électrons donnés, et enregistre sous forme de .png
import numpy as np
import matplotlib.pyplot as plt
def Config():
Z=int(input("Combien d'electrons ?"))
orbitales = ["1s", "2s", "2p", "3s", "3p", "4s","3d", "4p", "5s", "4d", "5p", "6s","4f", "5d", "6p", "7s", "5f", "6d", "7p"]
max_elec = {"s": 2,"p": 6,"d": 10,"f": 14}
config = []
reste = Z
for orb in orbitales:
l = orb[-1] # type de sous-couche: s, p, d, f
n = min(max_elec[l], reste)
config.append([f"{orb}^",n])
reste -= n
if reste <= 0:
break
print('Configuration électronique :',config)
return config,Z
def traceur() :
orbits,Z = Config()
population = [0 for i in range(7)]
for orb in orbits :
n = int(orb[0][0])
population[n-1]+=orb[1]
print('Population :',population)
fig, ax = plt.subplots()
rayons=np.linspace(1,7,7,dtype=int)
for r, n_e in zip(rayons, population):
if n_e!=0 :
cercle = plt.Circle((0, 0), r, fill=False)
ax.add_patch(cercle)
angles = np.linspace(0, 2*np.pi, n_e, endpoint=False)
x = r * np.cos(angles)
y = r * np.sin(angles)
ax.scatter(x, y, s=50) # s=taille du point
nucleus = plt.Circle((0, 0), 0.2, color=(0,0,1))
ax.add_patch(nucleus)
ax.set_aspect('equal', 'box')
plt.axis('off')
ax.set_xlim(-max(rayons)-1, max(rayons)+1)
ax.set_ylim(-max(rayons)-1, max(rayons)+1)
ax.set_xticks([])
ax.set_yticks([])
plt.savefig(f'orb_{Z}')
plt.show()
traceur()Python : Réalisation du cube
Le programme suivant (aussi en pièce jointe) permet de réaliser rapidement un patron de cube pour la découpe laser. Il reste cependant avec cette version à placer les éléments et les changer en chemin.
Le template (en pièce jointe) pour le cube est un fichier .svg à placer dans le dossier contenant le programme. Il est tout à fait possible de copier coller le programme dans un fichier .py.
Il faut cependant changer les emplacements de dossiers et fichiers (lignes 271, 273, 275, 377 et 380) comme nécessaire pour le tout fonctionne correctement.
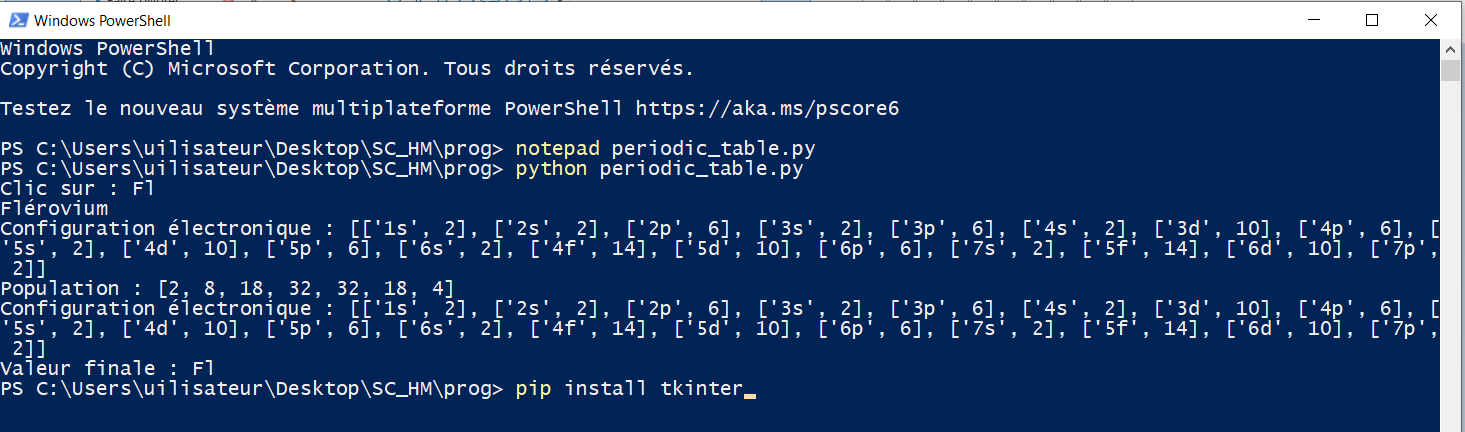
Pour le faire tourner, un double-clic sur le fichier fonctionne pour sûr avec Windows 10 et 11. Personnellement, j'utilise le powershell, accessible à partir du dossier actif en tapant "powershell" dans la barre horizontale au dessus du contenu de celui-ci.
"Notepad [nom du fichier].py" permet d'ouvrir un fichier .py dans le bloc-notes (comme un fichier texte) pour le modifier.
"Python [nom du fichier].py" permet d'utiliser le programme avec la version de python actuellement installée localement (3.13.5 pour moi).
Pour les différentes bibliothèques, si elles ne sont pas installées localement, le programme ne s'exécute pas. Il faut donc les installer : "pip install [nom de la bilbiothèque]" permet de le faire.
import tkinter as tk #Sert à la création d'interfaces
from tkinter import messagebox
import os #Pour les opérations relatives aux chemins et les emplacements des fichiers
import matplotlib.pyplot as plt #Pour les créations de grahiques
import shutil #Utilisé pour la copie et le déplacement de fichiers
import xml.etree.ElementTree as ET #Pour l'intéraction avec Inkscape
import base64
import numpy as np #Bibliothèque mathématique
## liste des 118 éléments avec Numéro, Symbole, Noms en anglais, français, chinois, russe et espagnol. Les deux nombres ensuite sont les coordonnés dans le tableau.
elements = [
(1, "H", ("Hydrogen","Hydrogène","氢","الهيدروجين","Водород","Hidrógeno"), 1, 1),
(2, "He", ("Helium","Hélium","氦","الهيليوم","Гелий","Helio"), 18, 1),
(3, "Li", ("Lithium","Lithium","锂","الليثيوم","Литий","Litio"), 1, 2),
(4, "Be", ("Beryllium","Béryllium","铍","البريليوم","Бериллий","Berilio"), 2, 2),
(5, "B", ("Boron","Bore","硼","البورون","Бор","Boro"), 13, 2),
(6, "C", ("Carbon","Carbone","碳","الكربون","Углерод","Carbono"), 14, 2),
(7, "N", ("Nitrogen","Azote","氮","النيتروجين","Азот","Nitrógeno"), 15, 2),
(8, "O", ("Oxygen","Oxygène","氧","الأكسجين","Кислород","Oxígeno"), 16, 2),
(9, "F", ("Fluorine","Fluor","氟","الفلور","Фтор","Flúor"), 17, 2),
(10, "Ne", ("Neon","Néon","氖","النيون","Неон","Neón"), 18, 2),
(11, "Na", ("Sodium","Sodium","钠","الصوديوم","Натрий","Sodio"), 1, 3),
(12, "Mg", ("Magnesium","Magnésium","镁","المغنيسيوم","Магний","Magnesio"), 2, 3),
(13, "Al", ("Aluminum","Aluminium","铝","الألومنيوم","Алюминий","Aluminio"), 13, 3),
(14, "Si", ("Silicon","Silicium","硅","السيليكون","Кремний","Silicio"), 14, 3),
(15, "P", ("Phosphorus","Phosphore","磷","الفوسفور","Фосфор","Fósforo"), 15, 3),
(16, "S", ("Sulfur","Soufre","硫","الكبريت","Сера","Azufre"), 16, 3),
(17, "Cl", ("Chlorine","Chlore","氯","الكلور","Хлор","Cloro"), 17, 3),
(18, "Ar", ("Argon","Argon","氩","الأرجون","Аргон","Argón"), 18, 3),
(19, "K", ("Potassium","Potassium","钾","البوتاسيوم","Калий","Potasio"), 1, 4),
(20, "Ca", ("Calcium","Calcium","钙","الكالسيوم","Кальций","Calcio"), 2, 4),
(21, "Sc", ("Scandium","Scandium","钪","الإسكنديوم","Скандий","Escandio"), 3, 4),
(22, "Ti", ("Titanium","Titane","钛","التيتانيوم","Титан","Titanio"), 4, 4),
(23, "V", ("Vanadium","Vanadium","钒","الفاناديوم","Ванадий","Vanadio"), 5, 4),
(24, "Cr", ("Chromium","Chrome","铬","الكروم","Хром","Cromo"), 6, 4),
(25, "Mn", ("Manganese","Manganèse","锰","المنغنيز","Марганец","Manganeso"), 7, 4),
(26, "Fe", ("Iron","Fer","铁","الحديد","Железо","Hierro"), 8, 4),
(27, "Co", ("Cobalt","Cobalt","钴","الكوبالت","Кобальт","Cobalto"), 9, 4),
(28, "Ni", ("Nickel","Nickel","镍","النيكل","Никель","Níquel"), 10, 4),
(29, "Cu", ("Copper","Cuivre","铜","النحاس","Медь","Cobre"), 11, 4),
(30, "Zn", ("Zinc","Zinc","锌","الزنك","Цинк","Zinc"), 12, 4),
(31, "Ga", ("Gallium","Gallium","镓","الغاليوم","Галлий","Galio"), 13, 4),
(32, "Ge", ("Germanium","Germanium","锗","الجرمانيوم","Германий","Germanio"), 14, 4),
(33, "As", ("Arsenic","Arsenic","砷","الزرنيخ","Мышьяк","Arsénico"), 15, 4),
(34, "Se", ("Selenium","Sélénium","硒","السيلينيوم","Селен","Selenio"), 16, 4),
(35, "Br", ("Bromine","Brome","溴","البروم","Бром","Bromo"), 17, 4),
(36, "Kr", ("Krypton","Krypton","氪","الكريبتون","Криптон","Kriptón"), 18, 4),
(37, "Rb", ("Rubidium","Rubidium","铷","الروبيديوم","Рубидий","Rubidio"), 1, 5),
(38, "Sr", ("Strontium","Strontium","锶","السترونشيوم","Стронций","Estroncio"), 2, 5),
(39, "Y", ("Yttrium","Yttrium","钇","الإيتريوم","Иттрий","Itrio"), 3, 5),
(40, "Zr", ("Zirconium","Zirconium","锆","الزركونيوم","Цирконий","Circonio"), 4, 5),
(41, "Nb", ("Niobium","Niobium","铌","النيوبيوم","Ниобий","Niobio"), 5, 5),
(42, "Mo", ("Molybdenum","Molybdène","钼","الموليبدينوم","Молибден","Molibdeno"), 6, 5),
(43, "Tc", ("Technetium","Technétium","锝","التكنيتيوم","Технеций","Tecnecio"), 7, 5),
(44, "Ru", ("Ruthenium","Ruthénium","钌","الروثينيوم","Рутений","Rutenio"), 8, 5),
(45, "Rh", ("Rhodium","Rhodium","铑","الروديوم","Родий","Rodio"), 9, 5),
(46, "Pd", ("Palladium","Palladium","钯","البلاديوم","Палладий","Paladio"), 10, 5),
(47, "Ag", ("Silver","Argent","银","الفضة","Серебро","Plata"), 11, 5),
(48, "Cd", ("Cadmium","Cadmium","镉","الكادميوم","Кадмий","Cadmio"), 12, 5),
(49, "In", ("Indium","Indium","铟","الإنديوم","Индий","Indio"), 13, 5),
(50, "Sn", ("Tin","Étain","锡","القصدير","Олово","Estaño"), 14, 5),
(51, "Sb", ("Antimony","Antimoine","锑","الأنتيمون","Сурьма","Antimonio"), 15, 5),
(52, "Te", ("Tellurium","Tellure","碲","التيلوريوم","Теллур","Telurio"), 16, 5),
(53, "I", ("Iodine","Iode","碘","اليود","Йод","Yodo"), 17, 5),
(54, "Xe", ("Xenon","Xénon","氙","الزينون","Ксенон","Xenón"), 18, 5),
(55, "Cs", ("Cesium","Césium","铯","السيزيوم","Цезий","Cesio"), 1, 6),
(56, "Ba", ("Barium","Baryum","钡","الباريوم","Барий","Bario"), 2, 6),
# Lanthanides
(57, "La", ("Lanthanum","Lanthane","镧","اللانثانوم","Лантан","Lantano"), 3, 9),
(58, "Ce", ("Cerium","Cérium","铈","السيريوم","Церий","Cerio"), 4, 9),
(59, "Pr", ("Praseodymium","Praséodyme","镨","البراسيوديميوم","Празеодим","Praseodimio"), 5, 9),
(60, "Nd", ("Neodymium","Néodyme","钕","النيوديميوم","Неодим","Neodimio"), 6, 9),
(61, "Pm", ("Promethium","Prométhium","钷","البروميثيوم","Прометий","Prometio"), 7, 9),
(62, "Sm", ("Samarium","Samarium","钐","الساماريوم","Самарий","Samario"), 8, 9),
(63, "Eu", ("Europium","Europium","铕","اليوروبيوم","Европий","Europio"), 9, 9),
(64, "Gd", ("Gadolinium","Gadolinium","钆","الغادولينيوم","Гадолиний","Gadolinio"), 10, 9),
(65, "Tb", ("Terbium","Terbium","铽","التيربيوم","Тербий","Terbio"), 11, 9),
(66, "Dy", ("Dysprosium","Dysprosium","镝","الديسبروسيوم","Диспрозий","Disprosio"), 12, 9),
(67, "Ho", ("Holmium","Holmium","钬","الهولميوم","Гольмий","Holmio"), 13, 9),
(68, "Er", ("Erbium","Erbium","铒","الإربيوم","Эрбий","Erbio"), 14, 9),
(69, "Tm", ("Thulium","Thulium","铥","الثوليوم","Туллий","Tulio"), 15, 9),
(70, "Yb", ("Ytterbium","Ytterbium","镱","الإيتربيوم","Иттербий","Iterbio"), 16, 9),
(71, "Lu", ("Lutetium","Lutécium","镥","اللوتيتيوم","Лютеций","Lutecio"), 17, 9),
(72, "Hf", ("Hafnium","Hafnium","铪","الهافنيوم","Гафний","Hafnio"), 4, 6),
(73, "Ta", ("Tantalum","Tantale","钽","التنتالوم","Тантал","Tantalio"), 5, 6),
(74, "W", ("Tungsten","Tungstène","钨","التنغستن","Вольфрам","Wolframio"), 6, 6),
(75, "Re", ("Rhenium","Rhénium","铼","الرينيوم","Рений","Renio"), 7, 6),
(76, "Os", ("Osmium","Osmium","锇","الأوزميوم","Осмий","Osmio"), 8, 6),
(77, "Ir", ("Iridium","Iridium","铱","الإيريديوم","Иридий","Iridio"), 9, 6),
(78, "Pt", ("Platinum","Platine","铂","البلاتين","Платина","Platino"), 10, 6),
(79, "Au", ("Gold","Or","金","الذهب","Золото","Oro"), 11, 6),
(80, "Hg", ("Mercury","Mercure","汞","الزئبق","Ртуть","Mercurio"), 12, 6),
(81, "Tl", ("Thallium","Thallium","铊","الثاليوم","Таллий","Talio"), 13, 6),
(82, "Pb", ("Lead","Plomb","铅","الرصاص","Свинец","Plomo"), 14, 6),
(83, "Bi", ("Bismuth","Bismuth","铋","البزموت","Висмут","Bismuto"), 15, 6),
(84, "Po", ("Polonium","Polonium","钋","البولونيوم","Полоний","Polonio"), 16, 6),
(85, "At", ("Astatine","Astate","砹","الأستاتين","Астат","Astato"), 17, 6),
(86, "Rn", ("Radon","Radon","氡","الرادون","Радон","Radón"), 18, 6),
(87, "Fr", ("Francium","Francium","钫","الفرانسيوم","Франций","Francio"), 1, 7),
(88, "Ra", ("Radium","Radium","镭","الراديوم","Радий","Radio"), 2, 7),
# Actinides
(89, "Ac", ("Actinium","Actinium","锕","الأكتينيوم","Актиний","Actinio"), 3, 10),
(90, "Th", ("Thorium","Thorium","钍","الثوريوم","Торий","Torio"), 4, 10),
(91, "Pa", ("Protactinium","Protactinium","镤","البروتاكتينيوم","Протактиний","Protactinio"), 5, 10),
(92, "U", ("Uranium","Uranium","铀","اليورانيوم","Уран","Uranio"), 6, 10),
(93, "Np", ("Neptunium","Neptunium","镎","النيبتونيوم","Нептуний","Neptunio"), 7, 10),
(94, "Pu", ("Plutonium","Plutonium","钚","البلوتونيوم","Плутоний","Plutonio"), 8, 10),
(95, "Am", ("Americium","Américium","镅","الأميريكيوم","Америций","Americio"), 9, 10),
(96, "Cm", ("Curium","Curium","锔","الكوريوم","Кюрий","Curio"), 10, 10),
(97, "Bk", ("Berkelium","Berkelium","锫","البركيليوم","Берклий","Berkelio"), 11, 10),
(98, "Cf", ("Californium","Californium","锎","الكاليفورنيوم","Калифорний","Californio"), 12, 10),
(99, "Es", ("Einsteinium","Einsteinium","锿","الآينشتينيوم","Эйнштейний","Einsteinio"), 13, 10),
(100, "Fm", ("Fermium","Fermium","镄","الفرميوم","Фермий","Fermio"), 14, 10),
(101, "Md", ("Mendelevium","Mendélévium","钔","المندليفيوم","Менделевий","Mendelevio"), 15, 10),
(102, "No", ("Nobelium","Nobélium","锘","النوبليوم","Нобелий","Nobelio"), 16, 10),
(103, "Lr", ("Lawrencium","Lawrencium","铹","اللورنسيوم","Лоуренсий","Laurencio"), 17, 10),
(104, "Rf", ("Rutherfordium","Rutherfordium","𬬭","الرذرفورديوم","Резерфордий","Rutherfordio"), 4, 7),
(105, "Db", ("Dubnium","Dubnium","𬭊","الدوبنيوم","Дубний","Dubnio"), 5, 7),
(106, "Sg", ("Seaborgium","Seaborgium","𬭳","السيبورغيوم","Сиборгий","Seaborgio"), 6, 7),
(107, "Bh", ("Bohrium","Bohrium","𬭛","البوهريوم","Борий","Bohrio"), 7, 7),
(108, "Hs", ("Hassium","Hassium","𬭶","الهسيوم","Хассий","Hassio"), 8, 7),
(109, "Mt", ("Meitnerium","Meitnerium","𬭸","الميتنيريوم","Мейтнерий","Meitnerio"), 9, 7),
(110, "Ds", ("Darmstadtium","Darmstadtium","𬭼","دارمشتاتيوم","Дармштадтий","Darmstadtio"), 10, 7),
(111, "Rg", ("Roentgenium","Roentgenium","𬭩","الرونتجينيوم","Рентгений","Roentgenio"), 11, 7),
(112, "Cn", ("Copernicium","Copernicium","𬭳","الكوبرنيسيوم","Коперниций","Copernicio"), 12, 7),
(113, "Nh", ("Nihonium","Nihonium","𬭭","النيهونيوم","Нихоний","Nihonio"), 13, 7),
(114, "Fl", ("Flerovium","Flérovium","𬭫","الفليروفيوم","Флеровий","Flerovio"), 14, 7),
(115, "Mc", ("Moscovium","Moscovium","𬭬","الموسكوفيوم","Московий","Moscovio"), 15, 7),
(116, "Lv", ("Livermorium","Livermorium","𬭳","الليفرموريوم","Ливерморий","Livermorio"), 16, 7),
(117, "Ts", ("Tennessine","Tennessine","𬭸","التينيسين","Теннессин","Tenesino"), 17, 7),
(118, "Og", ("Oganesson","Oganesson","𬭛","الأوجانيسون","Оганессон","Oganesón"), 18, 7)
]
## Donne la configuration électronique en fonction du nombre d'électron Z donné.
def Config(Z):
orbitales = ["1s", "2s", "2p", "3s", "3p", "4s","3d", "4p", "5s", "4d", "5p", "6s","4f", "5d", "6p", "7s", "5f", "6d", "7p"]
max_elec = {"s": 2,"p": 6,"d": 10,"f": 14} #nombre max d'électrons par couche
config = []
reste = Z
for orb in orbitales: #Parcourt la liste des orbitales
l = orb[-1] #Identifie le type de sous-couche: s, p, d, f
n = min(max_elec[l], reste) #Compte le nombre d'électrons dans la sous-couche
config.append([f"{orb}",n]) #Sauvegarge dans la liste config de l'orbitale te de son remplissage
reste -= n #Retire le nombre d'électrons ajoutés à la sous-couche
if reste <= 0: #Fin du parcourt des orbitales quand il n'y a plus d'électrons à répartir
break
print('Configuration électronique :',config) #Affiche les résultats de configuration
return config #Renvoie les résultats de configuration sous forme de liste
## Trace le modèle de Borh d'un atome, avec son nom et son symbole, à but illustratif
def traceur1(Z,name,symbol) :
orbits = Config(Z) #Fait appel à la fonction Config() et stocke le résultat dans la variable orbits
population = [0 for i in range(7)] #Crée une liste de 0 (Longueur de 7) (les couches de 1 à 7)
for orb in orbits : #Parcourt la liste orbits
n = int(orb[0][0]) #Lit la couche orbitale "1" dans la notation "1s" par exemple
population[n-1]+=orb[1] #Ajoute le nombre d'électrons dans la coche correspondante
print('Population :',population) #Affiche la répartition de population par couche
fig, ax = plt.subplots() #Création du graphique
rayons=np.linspace(1,7,7,dtype=int) #Création d'une liste de 7 valeurs (pour les rayons des cercles)
for r, n_e in zip(rayons, population): #Parcourt les couches de 1 à 7 et la liste des rayons en même temps
if n_e!=0 : #Ne trace le cercle que si le nombre d'électrons est supérireur à 0
cercle = plt.Circle((0, 0), r, fill=False) #Créé un cercle de rayon r et de centre 0,0
ax.add_patch(cercle) #Ajoute le cercle sur le graphe
angles = np.linspace(0, 2*np.pi, n_e, endpoint=False) #Calcule les angles pour répartir les n électrons de la couche sur le cercle
x = r * np.cos(angles) #Ces deux lignes placent les électrons sur les cercles
y = r * np.sin(angles)
ax.scatter(x, y, s=50) # s=taille du point
nucleus = plt.Circle((0, 0), 0.2, color=(0,0,1)) #Crée le noyau
ax.add_patch(nucleus) #Ajoute le noyau
ax.set_aspect('equal', 'box') #Fait une boite carrée pour l'affichage du graphique
ax.set_xlim(-max(rayons)-1, max(rayons)+1) #Fixe les limites de l'axe x
ax.set_ylim(-max(rayons)-1, max(rayons)+1) #Fixe les limites de l'axe y
ax.set_xticks([]) #Enlève les graduations de l'axe x
ax.set_yticks([]) #Enlève les graduations de l'axe x
plt.title(f"Modèle de Bohr - {name} ({symbol})") #Titre
plt.show(block=False) #Affiche le graphique dans une nouvelle fenêtre et ne bloque pas la suite de l'execution du programme
## Trace le modèle de Borh d'un atome, et l'enregistre en png dans le dossier actif
def traceur2(Z,name) :
orbits = Config(Z)
population = [0 for i in range(7)]
for orb in orbits :
n = int(orb[0][0])
population[n-1]+=orb[1]
fig, ax = plt.subplots()
rayons=np.linspace(1,7,7,dtype=int)
for r, n_e in zip(rayons, population):
if n_e!=0 :
cercle = plt.Circle((0, 0), r, fill=False)
ax.add_patch(cercle)
angles = np.linspace(0, 2*np.pi, n_e, endpoint=False)
x = r * np.cos(angles)
y = r * np.sin(angles)
ax.scatter(x, y, s=50) # s=taille du point
nucleus = plt.Circle((0, 0), 0.2, color=(0,0,1))
ax.add_patch(nucleus)
ax.set_aspect('equal', 'box')
plt.axis('off') #Enlève les axes
ax.set_xlim(-max(rayons)-1, max(rayons)+1)
ax.set_ylim(-max(rayons)-1, max(rayons)+1)
ax.set_xticks([])
ax.set_yticks([])
plt.savefig(f'orb_{name}') #Sauvegarde la figure sous le nom 'orb_[nom de l'atome]'
plt.close() #Ferme la figure après l'enregistrement
class PeriodicTableApp: #Création d'un objet
def __init__(self, master): #Fonction qui se lance automatiquement lors de la création de l'objet
self.master = master #Permet de combiner la fenêtre tkinter à l'objet
self.last_clicked = None #Création d'une variable pour stocker le dernier click effectué
for (num, sym, name, col, row) in elements: #Parcourt la liste des éléments
btn = tk.Button(master, text=sym, width=5, height=2,
command=lambda s=sym: self.on_click(s)) #Paramètres d'affichage du bouton
btn.grid(row=row, column=col) #Grille des boutons avec les coordonnées
def on_click(self, symbol): #Fonction qui s'active lors d'un click sur un bouton
name='' #Crée une variable string vide
self.last_clicked = symbol #Stocke le symbole dans la variable
print("Clic sur :", symbol) #Affiche dans le terminal l'élément clické (symbol)
for i in range(len(elements)) : #Parcourt la liste d'éléments
if symbol in elements[i] and len(symbol)==len(elements[i][1]) : #Cherche le symbole clické dans la liste
name = elements[i][2][1] #Récupère le nom
print(name) #Affiche le nom
reponse = messagebox.askokcancel("Gravure de l'élement", f"Clic sur {name} ({symbol}), Faire un fichier ?") #Ouvre une fenêtre pour demander confirmation
if reponse is True : #En cas de réponse positive
os.makedirs(f"{symbol}_box", exist_ok=True) #Créé un dossier dans le dossier actif en fonction du symbole
#Les lignes suivantes servent à copier un teplate .svg dans le dossier récement crée. Il convient de modifier les chemins comme necessaire.
os.chdir(f"C:/Users/uilisateur/Desktop/SC_HM/prog/{symbol}_box") #Change le dossier actif à celui designé (celui de l'élément)
# os.chdir(f"D:/fbalba/prog/{symbol}_box")
src=f"C:/Users/uilisateur/Desktop/SC_HM/prog/BasedBox15mm.svg" #Création de stings avec des emplacements de fichiers
# src=f"D:/fbalba/prog/BasedBox15mm.svg"
dst=f"C:/Users/uilisateur/Desktop/SC_HM/prog/{symbol}_box/{symbol}_box.svg"
# dst=f"D:/fbalba/prog/{symbol}_box/{symbol}_box.svg"
shutil.copy(src,dst) #Commande pour copier le fichier choisi dans le nouvel emplacement
for i in range(len(elements)): #Parcourt la liste des éléments
if symbol in elements[i] and len(symbol)==len(elements[i][1]) : #Cherche le symbole clické dans la liste
traceur1(elements[i][0],elements[i][2][1],elements[i][1]) #Execute les fonctions traceur avec les bons arguments
traceur2(elements[i][0],elements[i][2][1])
tree = ET.parse(f"{symbol}_box.svg") #Charge un fichier .svg et permet de travailler avec en python
root = tree.getroot() #Necessaire pour modifier le fichier
ns = {"svg": "http://www.w3.org/2000/svg"} #ns=Namespace : Dictionnaire qui contient des spcéciations concernant les .svg
ET.register_namespace("", ns["svg"]) #Permet au code d'utiliser le namespace
for i in range(len(elements)):
if symbol in elements[i] and len(symbol)==len(elements[i][1]) :
if len(elements[i][1])==1 : #Change la taille de police selon la longueur du symbole
symb = ET.Element("{http://www.w3.org/2000/svg}text", { #Mise en forme du texte voulu, ici le symbole
"x": "100", # X position
"y": "150", # Y position
"font-size": "20",
"font-family": "Bauhaus 93",
"fill": "black",
"text-anchor": "middle"
})
symb.text = f"{elements[i][1]}"
root.append(symb)
else :
symb = ET.Element("{http://www.w3.org/2000/svg}text", {
"x": "100", # X position
"y": "150", # Y position
"font-size": "16",
"font-family": "Bauhaus 93",
"fill": "black",
"text-anchor": "middle"
})
symb.text = f"{elements[i][1]}"
root.append(symb)
for j in range(len(elements[i][2])): #Ajoute les noms dans les différentes langues
ypos=150+10*j
text = ET.Element("{http://www.w3.org/2000/svg}text", {
"x": "80", # X position
"y": str(ypos), # Y position
"font-size": "10",
"font-family": "Bauhaus 93",
"font-weight": "bold",
"fill": "black",
"text-anchor": "middle"
})
text.text = f"{elements[i][2][j]}"
root.append(text)
num=ET.Element("{http://www.w3.org/2000/svg}text", { #Ajoute le numéro atomique
"x": "130",
"y": "150",
"font-size": "20",
"font-family": "Bauhaus 93",
"fill": "black",
"text-anchor": "middle"
})
num.text = f"{elements[i][0]}"
root.append(num)
number=ET.Element("{http://www.w3.org/2000/svg}text", { #Ajoute le mot "Number"
"x": "130",
"y": "125",
"font-size": "10",
"font-family": "Bauhaus 93",
"fill": "black",
"text-anchor": "middle"
})
number.text = "Number"
root.append(number)
with open(f"orb_{name}.png", "rb") as f: #Ajoute le modèle de Bohr enregistré dans le dossier actif
orb_data = f.read()
encoded_orb = base64.b64encode(orb_data).decode("utf-8")
orb = ET.Element("{http://www.w3.org/2000/svg}image", {
"x": "50",
"y": "50",
"width": "200",
"height": "200",
"href": f"data:image/png;base64,{encoded_orb}"
})
root.append(orb)
watermark=ET.Element("{http://www.w3.org/2000/svg}text", { #Ajoute le texte "Fait avec Python"
"x": "130",
"y": "125",
"font-size": "10",
"font-family": "Bauhaus 93",
"fill": "black",
"text-anchor": "middle"
})
watermark.text = "Fait avec Python"
root.append(watermark)
tree.write(f"{symbol}_box.svg", encoding="utf-8", xml_declaration=True)
os.chdir(f"C:/Users/uilisateur/Desktop/SC_HM/prog") #Remet le dossier parent comme actif
# os.chdir(f"D:/fbalba/prog")
if reponse is True :
os.startfile(f"C:/Users/uilisateur/Desktop/SC_HM/prog/{symbol}_box/{symbol}_box.svg") #Ouvre le fichier .svg qui vient d'être modifié
# os.startfile(f"D:/fbalba/prog/{symbol}_box/{symbol}_box.svg")
root = tk.Tk() #Permet de créer la fenêtre
root.title("Tableau Périodique") #Nom de la fenêtre
app = PeriodicTableApp(root) #Permet à l'objet PeriodicTableApp de s'afficher dans la fenêtre
root.mainloop() #Fait fonctionner la fenêtre jusqu'à sa fermeture
print("Valeur finale :", app.last_clicked) #Affiche la denière case clickée lors de la fermeture
Electrodéposition sur Impressions Résines
Big projet pour nos chers emplois étudiants dans l'espace bio-chimie. En vif : l'idée est de créer un modèle d'impression (ce que vous voulez : déco, bijou, figurine...) pour ensuite l'imprimer à l'aide des imprimantes résines de l'espace. L'étape suivante est l'électrodéposition d'une couche métallique, typiquement du cuivre, sur l'objet afin de lui donner - en théorie - un meilleur aspect. Puisque c'est un projet à plusieurs et que vous y participerez à tour de rôle, il va falloir DOCUMENTER (eh oui malheureusement) ce wiki, notamment les manips que vous faites, vos magnifiques résultats et vos échecs cuisants... Mais je crois en vous ! Par exemple vous pourrez préfacer chaque entrée avec votre nom, la date et l'idée de manip que vous aviez en tête pour ce jour. Notez si possible en détail ce que vous faites de sorte qu'un lecteur extérieur puisse refaire la même experience.
Référence principale : HEN3DRIK - Electroplating 3D Prints
HEN3DRIK est un vidéaste qui réalise des impressions 3d en résine pour ensuite faire de l'électrodéposition dessus. C'est la source d'inspiration principale du projet donc n'hésitez pas à aller y jeter un œil !
Chaine : https://www.youtube.com/@hen3drik/videos
Cette vidéo notamment est un bon résumé de ses méthodes et de ce qui est réalisable dans ce projet.
Mode d'emploi des imprimantes résines de l'espace chimie-bio
Cette page wiki contient les infos de fonctionnement des imprimantes résine de l'espace.
Protocole
SEBAI Taha 21/01/2026
Introduction :
L'électrodéposition est un procédé chimique qui permet d'avoir un rendu métallique sur des objets. Cette méthode est très utilisé dans l'industrie automobile et aérospatiale. Elle est très apprécié à cause de son faible coût et de sa précision. Cependant, il est important de préciser que l'électrodéposition n'est efficace qu'avec des métaux conducteurs comme l'acier, l'aluminium, le zinc , etc.
Comment marche l'électrodéposition :
Plus concrètement, cette méthode permet de déposer une fine couche de métal sur un objet initialement en plastique ou en résine. D'autre méthodes de revêtement existe comme la peinture à l'aérosol par exemple mais contrairement aux autres techniques, l'électrodéposition permet de recouvrir uniformément l'objet en question même dans les zone difficile d'accès. Voici par exemple une image illustrant bien les limites de la peinture par pulvérisation :
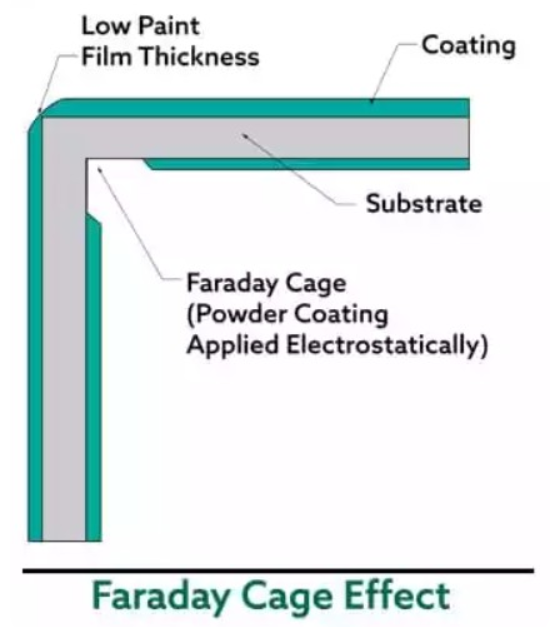
En savoir plus sur le Faraday Cage Effect : https://www.google.com/url?sa=t&source=web&rct=j&opi=89978449&url=https://fluorogistx.com/powder-coating-application-overcoming-the-faraday-cage-effect/&ved=2ahUKEwjX8_Xz75ySAxUjSaQEHeK5KsUQFnoECCEQAw&usg=AOvVaw2ZrWMbk1V5uhmkTzwuMHIi
Le processus consiste à immerger l'objet qu'on veut recouvrir (qu'on appelle le substrat) dans un bain d'électrolyte contenant des ions métalliques dans une solution. Ensuite, il suffit d'appliquer un courant dans le bain afin que les ions adhèrent au substrat et voilà, l'électrodéposition est terminé. Cette technique s'appelle l'électrolyse. Voici un schéma du montage expérimentale :
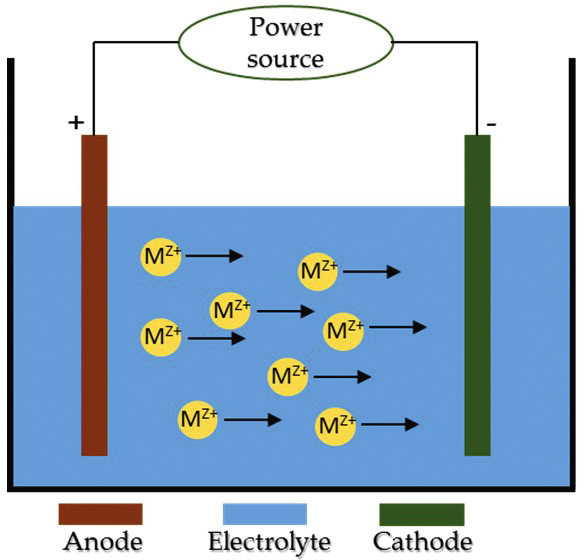
Note : entre l'anode et la cathode on place notre substrat et on a notre électrodéposition !
Ce projet peut être découpé en deux parties : la conception de l'objet 3D grâce à l'impression résine et l'électrodéposition sur le substrat.
N.B : On peut aussi utiliser un objet imprimé grâce à l'impression filament mais on préfère ici l'impression résine car elle est plus précise, et permet d'avoir des objets étanches (l'impression filament crée parfois des trous entre les couches ce qui risque de laisser passer l'électrolyte dans l'objet et d'avoir une électrodéposition dans des endroits indésirables).
Matériel nécessaire :
Avant toute chose, voici une liste de tous les produits et machines nécessaire à ce projet :
Pour l'impression de l'objet :
- Imprimante résine. Pour notre part, nous utiliserons l'imprimante Elegoo Saturn 2.
- Résine liquide
- Chambre à UV
- Éventuellement des outils pour poncer l'objet (là où il avait les supports)
Pour l'électrodéposition :
- Électrolyte de cuivre (ou de l'électrolyte d'or, de zinc ou tout autre métal conducteur)
https://www.amazon.fr/dp/B00FZKHU76?crid=3EOIMSZRP6ROT&keywords=glanzkupferelektrolyt&sprefix=glanzkup,aps,87&ref_=as_li_ss_tl&language=de_DE&sr=8-5&linkCode=gs2&linkId=dc6ce9f55ddb626ae768abc67856113e&tag=hen3drik08-21 - Anodes de cuivre (autrement dit des plaques métalliques). Il est préférable que la surface des anodes soit plus grande que la surface à couvrir
- Spray conducteur en cuivre (ou en graphite) pour mieux permettre l'adhésion du métal sur le substrat
https://www.amazon.fr/conducteur-bricolage-galvanik-synchronisation-plastique/dp/B0132N8F3A/ref=sr_1_1?__mk_fr_FR=%C3%85M%C3%85%C5%BD%C3%95%C3%91&crid=34ZYGU9FNXTGV&dib=eyJ2IjoiMSJ9.YDzt9PfifZhDW80StZ1S3uMkfhxOXJZB9qe8WVX8qejuCK8SsvTsaza6sMz-qN-72IMgg3mzJmmNhpkxnbA2-2l1hHf6kZ-40Z_lM-yZQMK_R_MqJuWAwkG9OWmJ-UBvN1Is_pAqfeaRpXmR0dxCFqQdJw3s32bY8sJiTAitG9IzYXlQ1Tc6EVje0q1M9hcP1QNXXTDNCOJbeDvP5uh8Pxs2DS0jvuaWE-nLyc-vn21-vqNA9LBvglMfa9ck50V7m-wy-YQgwGvzzHmrLE7rk3OdXPEgJvSNo69q7UuxnhM.pH4R2ejGkPvVj1T78B8_th4VE7hCq9lwuLV1TzZwmJI&dib_tag=se&keywords=peinture+conductive+cuivre&qid=1769012343&sprefix=peinture+conductrice+cuivre%2Caps%2C215&sr=8-1
Il est possible de remplacer la peinture en cuivre par une peinture en graphite "maison". Voici un extrait d'une vidéo où l'auteur explique comment il produit cette peinture : https://youtu.be/sGntt6eInis?t=202
Ça peut être une bonne idée car la peinture en cuivre coûte assez chère.
Alexa Raynal Cobo 18/02/2026:
Voici une version remaniée du texte. J'ai supprimé toutes les occurrences du "vous" (ainsi que les "votre/vos") pour adopter un ton plus technique, impersonnel et direct, tout en conservant la structure et la précision scientifique.
Méthodologie de l'Électrodéposition sur Résine
Phase 1 : Préparation de l'impression 3D
La qualité du placage dépend directement de la régularité et de la propreté de la surface initiale.
-
Nettoyage et Curage : L'objet en résine doit être intégralement lavé et polymérisé. Toute trace de résine liquide risque de s'échapper et de contaminer le bain d'électrolyse.
-
Ponçage : Un ponçage méticuleux est indispensable. Les lignes de couche deviennent plus saillantes après le placage ; une surface parfaitement lisse est donc requise en amont.
-
Dégraissage : L'utilisation de gants est obligatoire dès cette étape. Les huiles cutanées empêchent l'adhérence de la couche conductrice. Un nettoyage final à l'alcool isopropylique ou avec un dégraissant spécialisé est nécessaire.
Phase 2 : Revêtement Conducteur
Cette étape permet de créer une "peau" métallique capable de transporter le courant électrique sur un matériau isolant.
Options de revêtement :
-
Peinture Graphite (DIY) (déjà mentionnée): Mélange de poudre de graphite, d'un solvant (acétone) et d'un liant (vernis). Option économique mais présentant une résistance électrique plus élevée.
-
Peinture Conductrice Cuivre/Nickel : Sprays ou peintures du commerce. Haute conductivité et application simplifiée, malgré un coût supérieur.
-
Spray d'Argent : Standard professionnel offrant la meilleure conductivité, mais complexe à manipuler chimiquement.
Application :
-
Uniformité : Le revêtement doit être appliqué de manière homogène, sans laisser de zones nues.
-
Fixation des Contacts : Le fil de cathode (pôle négatif) doit être fixé sur une zone discrète avant le séchage complet ou à l'aide de colle conductrice.
-
Astuce : Pour les géométries complexes, multiplier les points de connexion assure une distribution uniforme du courant.
-
-
Scellement : Une couche supplémentaire de peinture conductrice sur le point de contact garantit la continuité électrique.
Phase 3 : Configuration du Bain d'Électrolyse
Le montage nécessite une cellule électrolytique composée des éléments suivants :
-
Le Réservoir : Récipient inerte (verre ou plastique) de taille adaptée à l'immersion totale de la pièce.
-
L'Électrolyte (Le Bain) : Solution de sels métalliques et d'acide.
-
Exemple pour le cuivre : Mélange d'eau distillée, de sulfate de cuivre, d'acide sulfurique et d'un agent brillantant (azurant).
-
-
L'Anode (Pôle +) : Métal source (ex: plaque ou tuyau de cuivre pur).
-
La Cathode (Pôle -) : L'impression 3D revêtue de sa couche conductrice.
-
Alimentation Électrique : Source de courant continu (CC) permettant une régulation précise de l'intensité (Ampères) et de la tension (Volts).
Phase 4 : Processus de Placage
-
Immersion : La pièce (cathode) est suspendue dans le bain sans contact avec l'anode ni les parois.
-
Agitation : L'usage d'une pompe d'aquarium ou d'un agitateur magnétique prévient la formation de bulles d'air et renouvelle les ions à la surface de la pièce.
-
Réglages Électriques :
-
Appliquer une intensité faible : environ 0,015 A/cm2 de surface.
-
Une intensité trop forte brûle le placage (aspect rugueux/saumoné) ; une intensité trop faible ralentit excessivement le dépôt.
-
Le contrôle doit se faire sur l'intensité (Courant) ; la tension s'ajuste selon la résistance du circuit.
-
-
Durée :
-
Couche Flash (10-20 min) : Premier dépôt pour vérifier la couverture. Les zones nues éventuelles doivent être retouchées à la peinture conductrice.
-
Placage Épais (2-6 heures) : Immersion prolongée pour obtenir une coque métallique durable et structurelle.
-
Phase 5 : Post-Traitement
En sortie de bain, le métal présente souvent un aspect terne.
-
Rinçage : Lavage immédiat à l'eau distillée pour neutraliser la réaction acide.
-
Polissage : Utilisation d'un outil rotatif avec disques de feutre et pâte à polir (type rouge de bijoutier) ou polish spécialisé pour révéler l'éclat.
-
Patine (Optionnel) : Utilisation de foie de soufre pour un aspect antique ou oxydé.
-
Protection : Application d'une laque transparente ou d'une cire microcristalline pour prévenir l'oxydation naturelle.
Précautions de Sécurité
-
Ventilation : Travail impératif sous hotte ou dans un espace très aéré pour évacuer les vapeurs acides.
-
EPI : Port obligatoire de lunettes de protection, de gants en nitrile et d'un tablier de protection. Le sulfate de cuivre est toxique et l'acide sulfurique hautement corrosif.
-
Gestion des Déchets : La solution d'électrolyte ne doit jamais être jetée à l'égout. L'élimination doit se faire via un centre de traitement des déchets chimiques dangereux.
Bibliographie :
- https://www.google.com/url?sa=t&source=web&rct=j&opi=89978449&url=https://www.laserax.com/fr/blog/electrodeposition&ved=2ahUKEwjPpd7h6JySAxUDOfsDHX1pAaAQFnoECBcQAw&usg=AOvVaw0cFowI6PVx_cWDVeZ3savC
- https://www.besterpcba.com/fr/quest-ce-que-lelectrodeposition/
- https://www.google.com/url?sa=i&url=https%3A%2F%2Fwww.researchgate.net%2Ffigure%2FSchematic-of-an-electrodeposition-process_fig1_330945229&psig=AOvVaw3TelGBSwzEQbcPM6VCg_Md&ust=1769095503063000&source=images&cd=vfe&opi=89978449&ved=0CBUQjRxqFwoTCPix_M35nJIDFQAAAAAdAAAAABAE
Tableau périodique pour l'espace chimie-bio
Réalisation d'un tableau périodique afin de décorer l'espace chimie-bio du fablab.
Design du tableau et des cases
L'idée de base est de faire un objet de décoration -plutôt que purement informatif. Il est donc nécessaire de donner une attention particulière aux cases et à la forme de celui-ci. Les case doivent donc si possible être lisibles de loin, en particulier pour les symboles des éléments. Pour limiter la taille des cases, et éviter réduire celle du tableau, le numéro atomique est superposé. Le nom est bien évidemment indiqué, en dessous du symbole et du numéro. Les cases sont réalisées par gravure laser.
 Tracé dans inkscape du groupe dit des non-métaux. Les éléments en noir sont à graver, en rouge à couper et en bleu à marquer.
Tracé dans inkscape du groupe dit des non-métaux. Les éléments en noir sont à graver, en rouge à couper et en bleu à marquer.
Pour la gravure laser, le symbole et le nom sont gravés et le numéro est marqué (gavage plus profond pour avoir plus de contraste). Les cases sont de dimension 5,315*4,000 cm.
 Après gravure dans un PMMA vert fluo. La gravure à été faite sur la face arrière et la face avant reste donc lisse.
Après gravure dans un PMMA vert fluo. La gravure à été faite sur la face arrière et la face avant reste donc lisse.
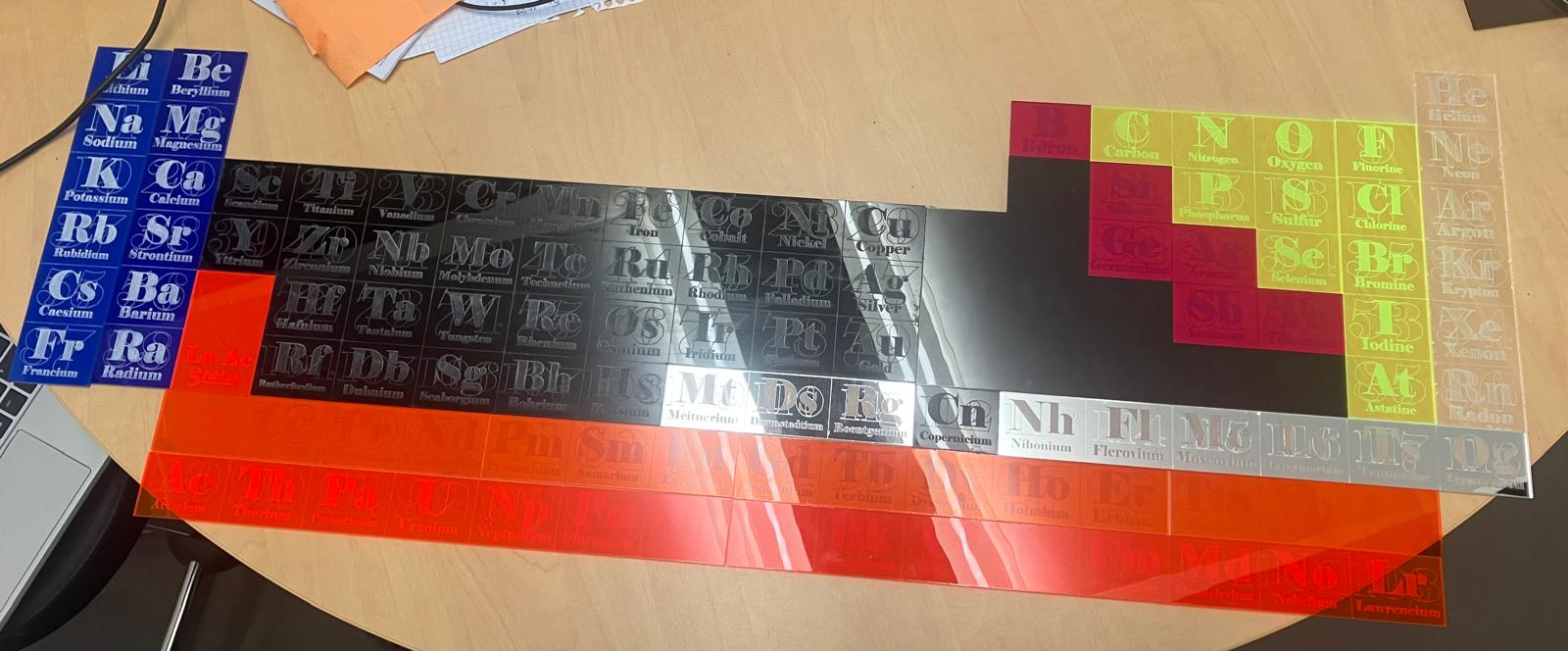
Le tableau entier fait environ 95*36 cm et à été réalisé avec différents PMMA (3mm) selon les différents groupes d'éléments :
- Non métaux et Halogènes : Vert fluo transparent*
- Alcalins : Bleu Roi
- Alcalino-terreux : Bleu nuit
- Lanthanides : Orange transparent*
- Actinides : Orange/Rouge fluo transparent*
- Métaux de Transition : Noir
- Métaux Pauvres : Gris
- Métalloïdes : Rose transparent*
- Gaz Nobles : Transparent*
- Non Classés : Transparent Miroir*
Les * signifient que la gravure est faite sue la face arrière de la case. En somme seuls les métaux ""usuels"" sont gravés sur la face avant, pour les mettre en évidence.
Le tableau sera ensuite placé dans un cadre en mdf et cp peuplier.
Génération du tableau par python
Afin de faire les cases de manière plus efficace (trop la flemme de faire les 118 à la main), j'ai décidé d'adapter le programme que j'ai réalisé pour la page sur les cubes périodiques. L'idée étant alors de pouvoir cliquer sur une case du tableau et décider de réaliser le cube pour cet élément comme précédemment ou de sélectionner le groupe (i.e. gaz noble, métal de transition, ...) et de produire le .svg pour le tableau.
Description
Améliorations générales
Pour une utilisation "plus agréable" du tableau, j'ai apporté quelques améliorations au programme :
- La police des symboles à été changée. Les cases sont désormais colorées selon leur groupe, afin d'améliorer la lisibilité du tableau (pas forcément daltonien-friendly malheureusement)
- Il est désormais possible de sélectionner un groupe entier dans le tableau
- Lors de la sélection la ou les case(s) concernée(s) change(nt) de couleur de fond et de texte
- Deux cases "placeholders" ont été ajoutées pour indiquer la position des lanthanides et actinides dans le tableau.
Le clic sur n'importe quelle case invoque un boite de dialogue demandant si l'utilisateur.ice veut sélectionner l'ensemble du groupe. Si oui, le groupe entier est sélectionné et il est possible de demander la réalisation du .svg pour le tableau ; si non, il est possible de réaliser le .svg pour le cube de l'élément sélectionné.
 Sélection de la case correspondant au Hafnium
Sélection de la case correspondant au Hafnium
Sélection du groupe
Invoque une deuxième boite de dialogue pour demander la réalisation du .svg pour le tableau.
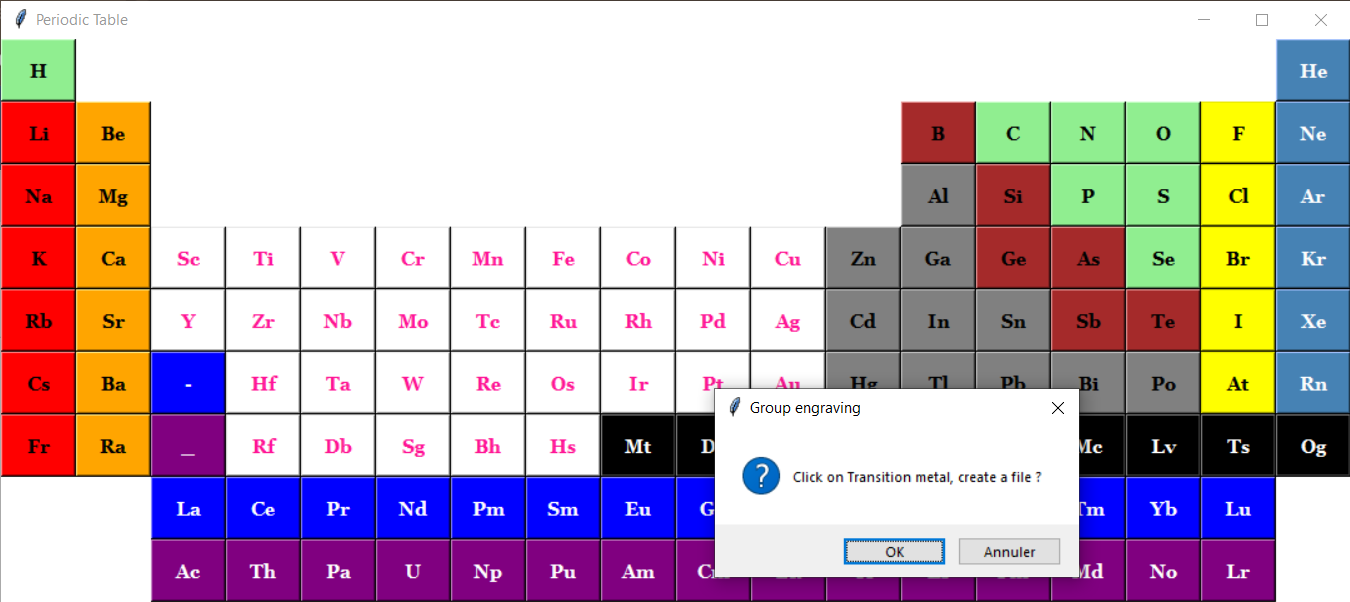 Sélection du groupe des métaux de transition
Sélection du groupe des métaux de transition
Si oui, le fichier .svg est crée puis ouvert, et les cases gardent le fond blanc et le texte en couleur.
 Fichier .sgv résultant.
Fichier .sgv résultant.
Les cases en rouges sont le pattern de coupe pour le passage au laser. Il faut toutes les sélectionner et faire "union" dans le menu "chemin", puis remodifier les paramètres de contours et de fond. Il est aussi nécessaire de transformer les cases du tableau en chemin pour éviter de potentielles pertes d'information en passant vers le logiciel de la machine. Par ailleurs, j'ai constaté que les numéros atomiques se finissant par "7" ne sont pas bien centrés dans les cases. Etant maniaque notoire, j'ai utilisé l'outil d'alignement de Inskape pour corriger chaque occurrence.
Une autre amélioration du programme serai d'enlever les lignes bleues qui vont être recouvertes par les rouge (donc garder celles qui séparent deux cases uniquement), plutôt que de laisser les cases. En effet, la superposition cause un deuxième passage du laser. Celui-ci n'a pas d'incidence sur la forme du produit de gravure, mais participe à un échauffement évitable du matériau (mais ne risque pas non plus de faire exploser le fablab).
Sélection d'un seul élément
Si l'utilisateur.ice ne souhaite pas sélectionner le groupe il peut faire le cube de l'élément sur lequel iel à cliqué. Ce programme fait ouvre un autre terminal et fait appel à une version adaptée du programme utilisé pour les cubes périodiques. La case sélectionnée apparait rouge sur le nouveau tableau crée. Il est ensuite possible d'interagir avec ce tableau comme celui des cubes périodiques. 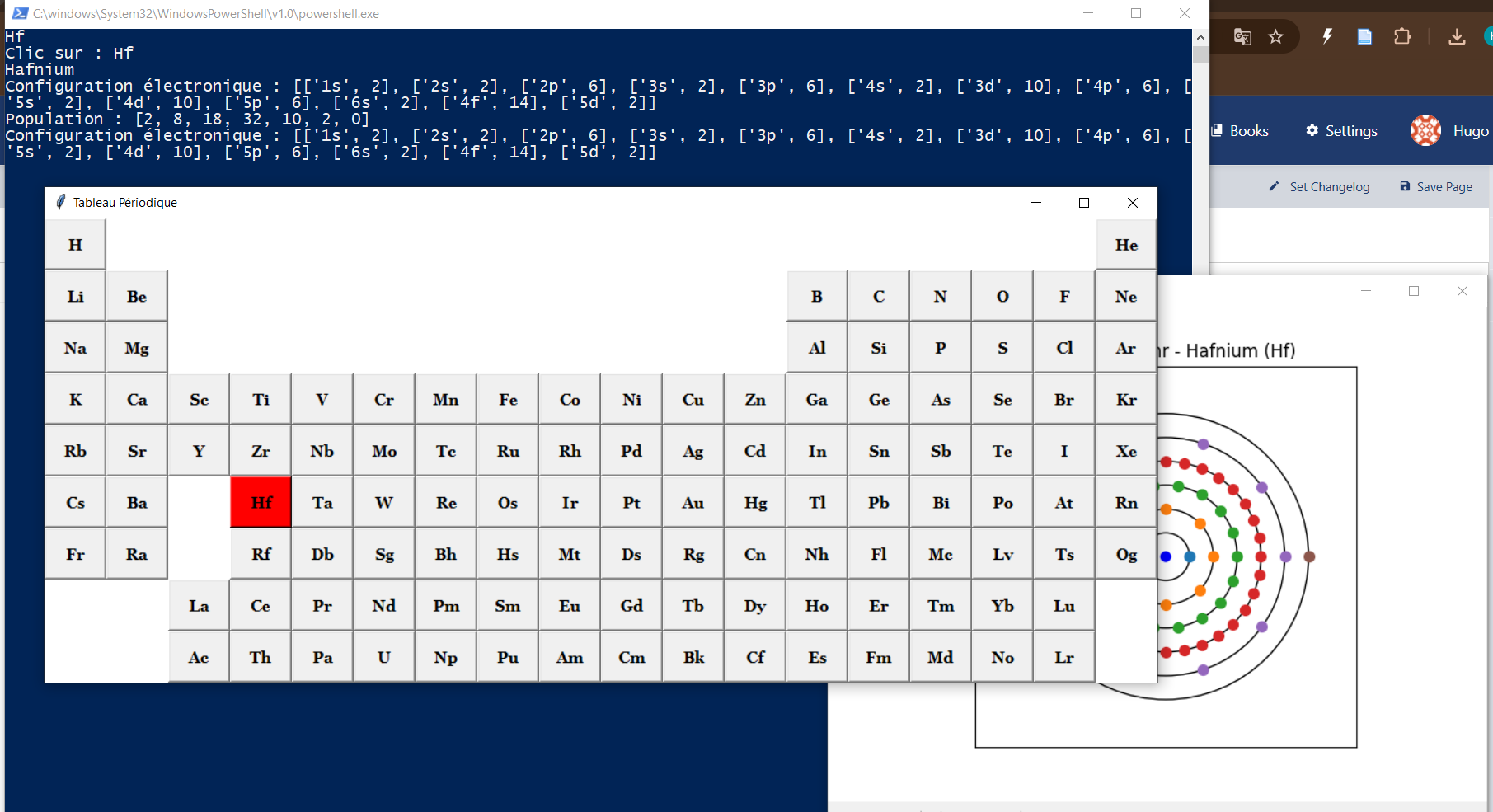
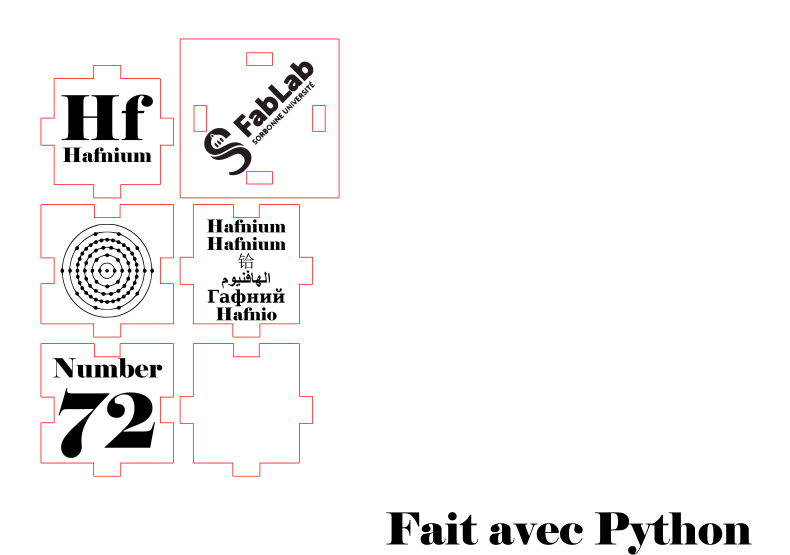
Utilisation
L'utilisation est identique à celle du programme des cubes périodiques.
Sur windows, dans le dossier contenant le programme taper "powershell" dans la barre au dessus des fichiers.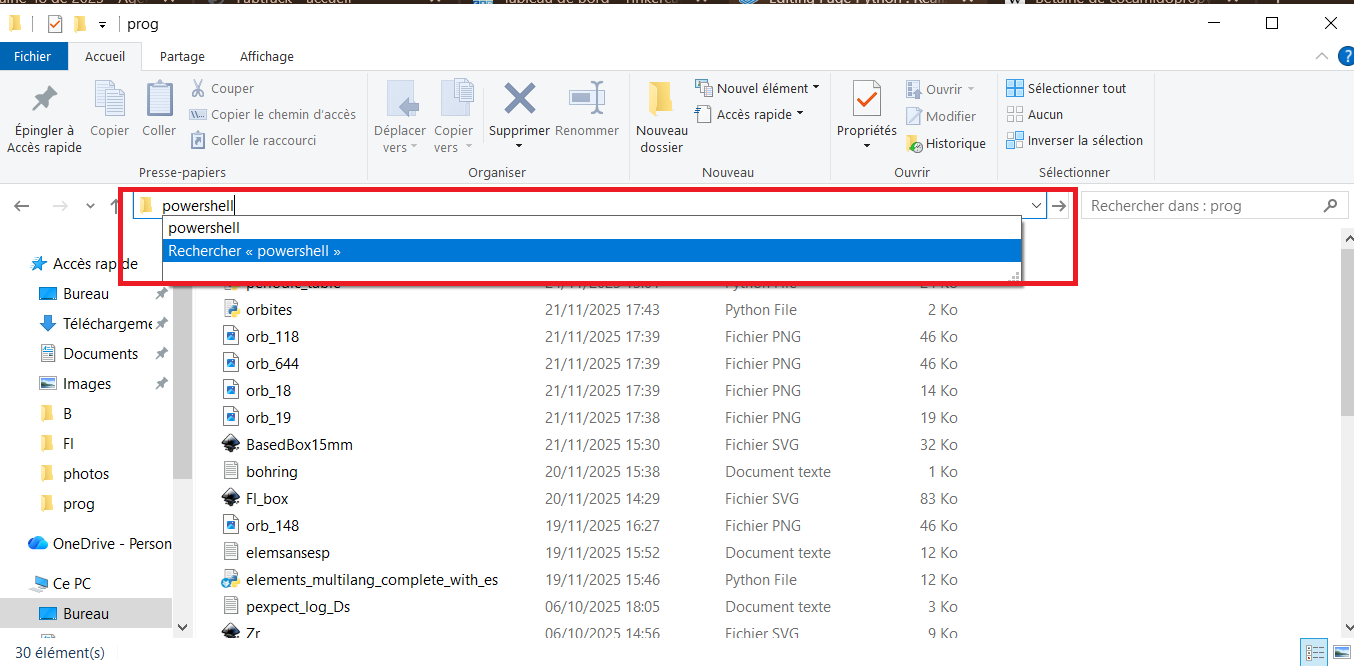
Une fois dans le powershell, :
- "notepad" + [nomdufichier].py permet d'ouvrir le programme avec le bloc note
- "python" + [nomdufichier].py permet d'exécuter le programme (j'ai travaillé avec python 3.13.5)
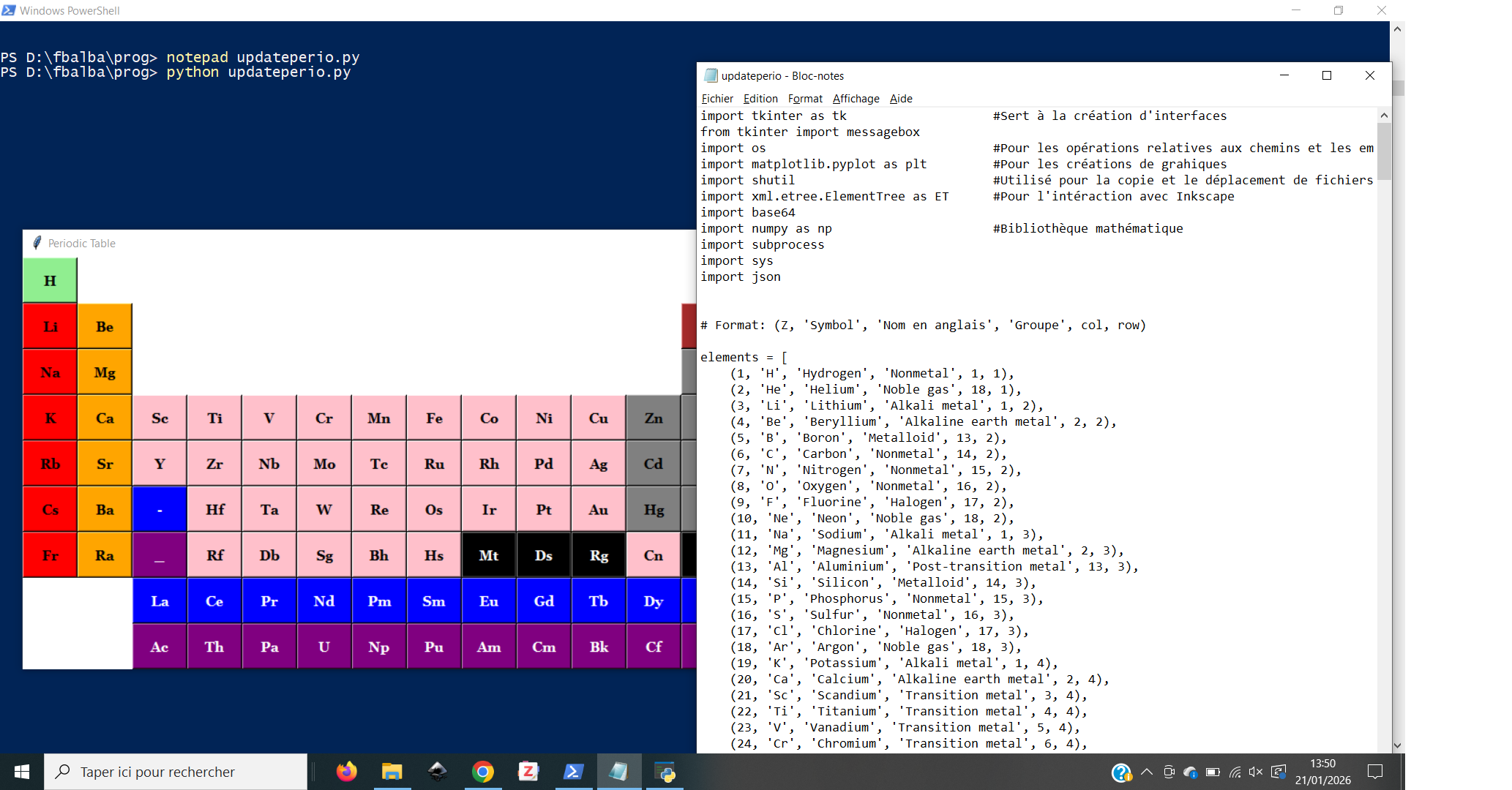
Si une bibliothèque utilisée dans le programme n'est pas installée, le programme renverra une erreur. Pour l'installer, il suffit de taper "pip install" + [nom de la bibliothèque] dans le powershell pour lancer l'installation. Les bibliothèques utilisées ici sont très connues donc pas de risques d'installer des malwares.
Programmes
(Dispo en pièces jointes)
Updateperio.py : programme principal
Ligne 347 à adapter pour les destinations de fichiers
(Regardez pas trop le prog fait un peu mal aux yeux)
import tkinter as tk #Sert à la création d'interfaces
from tkinter import messagebox
import os #Pour les opérations relatives aux chemins et les emplacements des fichiers
import matplotlib.pyplot as plt #Pour les créations de grahiques
import shutil #Utilisé pour la copie et le déplacement de fichiers
import xml.etree.ElementTree as ET #Pour l'intéraction avec Inkscape
import base64
import numpy as np #Bibliothèque mathématique
import subprocess
import sys
import json
# Format: (Z, 'Symbol', 'Nom en anglais', 'Groupe', col, row)
elements = [
(1, 'H', 'Hydrogen', 'Nonmetal', 1, 1),
(2, 'He', 'Helium', 'Noble gas', 18, 1),
(3, 'Li', 'Lithium', 'Alkali metal', 1, 2),
(4, 'Be', 'Beryllium', 'Alkaline earth metal', 2, 2),
(5, 'B', 'Boron', 'Metalloid', 13, 2),
(6, 'C', 'Carbon', 'Nonmetal', 14, 2),
(7, 'N', 'Nitrogen', 'Nonmetal', 15, 2),
(8, 'O', 'Oxygen', 'Nonmetal', 16, 2),
(9, 'F', 'Fluorine', 'Halogen', 17, 2),
(10, 'Ne', 'Neon', 'Noble gas', 18, 2),
(11, 'Na', 'Sodium', 'Alkali metal', 1, 3),
(12, 'Mg', 'Magnesium', 'Alkaline earth metal', 2, 3),
(13, 'Al', 'Aluminium', 'Post-transition metal', 13, 3),
(14, 'Si', 'Silicon', 'Metalloid', 14, 3),
(15, 'P', 'Phosphorus', 'Nonmetal', 15, 3),
(16, 'S', 'Sulfur', 'Nonmetal', 16, 3),
(17, 'Cl', 'Chlorine', 'Halogen', 17, 3),
(18, 'Ar', 'Argon', 'Noble gas', 18, 3),
(19, 'K', 'Potassium', 'Alkali metal', 1, 4),
(20, 'Ca', 'Calcium', 'Alkaline earth metal', 2, 4),
(21, 'Sc', 'Scandium', 'Transition metal', 3, 4),
(22, 'Ti', 'Titanium', 'Transition metal', 4, 4),
(23, 'V', 'Vanadium', 'Transition metal', 5, 4),
(24, 'Cr', 'Chromium', 'Transition metal', 6, 4),
(25, 'Mn', 'Manganese', 'Transition metal', 7, 4),
(26, 'Fe', 'Iron', 'Transition metal', 8, 4),
(27, 'Co', 'Cobalt', 'Transition metal', 9, 4),
(28, 'Ni', 'Nickel', 'Transition metal', 10, 4),
(29, 'Cu', 'Copper', 'Transition metal', 11, 4),
(30, 'Zn', 'Zinc', 'Post-transition metal', 12, 4),
(31, 'Ga', 'Gallium', 'Post-transition metal', 13, 4),
(32, 'Ge', 'Germanium', 'Metalloid', 14, 4),
(33, 'As', 'Arsenic', 'Metalloid', 15, 4),
(34, 'Se', 'Selenium', 'Nonmetal', 16, 4),
(35, 'Br', 'Bromine', 'Halogen', 17, 4),
(36, 'Kr', 'Krypton', 'Noble gas', 18, 4),
(37, 'Rb', 'Rubidium', 'Alkali metal', 1, 5),
(38, 'Sr', 'Strontium', 'Alkaline earth metal', 2, 5),
(39, 'Y', 'Yttrium', 'Transition metal', 3, 5),
(40, 'Zr', 'Zirconium', 'Transition metal', 4, 5),
(41, 'Nb', 'Niobium', 'Transition metal', 5, 5),
(42, 'Mo', 'Molybdenum', 'Transition metal', 6, 5),
(43, 'Tc', 'Technetium', 'Transition metal', 7, 5),
(44, 'Ru', 'Ruthenium', 'Transition metal', 8, 5),
(45, 'Rh', 'Rhodium', 'Transition metal', 9, 5),
(46, 'Pd', 'Palladium', 'Transition metal', 10, 5),
(47, 'Ag', 'Silver', 'Transition metal', 11, 5),
(48, 'Cd', 'Cadmium', 'Post-transition metal', 12, 5),
(49, 'In', 'Indium', 'Post-transition metal', 13, 5),
(50, 'Sn', 'Tin', 'Post-transition metal', 14, 5),
(51, 'Sb', 'Antimony', 'Metalloid', 15, 5),
(52, 'Te', 'Tellurium', 'Metalloid', 16, 5),
(53, 'I', 'Iodine', 'Halogen', 17, 5),
(54, 'Xe', 'Xenon', 'Noble gas', 18, 5),
(55, 'Cs', 'Caesium', 'Alkali metal', 1, 6),
(56, 'Ba', 'Barium', 'Alkaline earth metal', 2, 6),
(100000000000000000000000000000000000000000000000000, '-', 'Lanthanides', 'Lanthanide', 3, 6), #placeholder pour l'affichage du tableau
(57, 'La', 'Lanthanum', 'Lanthanide', 3, 9),
(58, 'Ce', 'Cerium', 'Lanthanide', 4, 9),
(59, 'Pr', 'Praseodymium', 'Lanthanide', 5, 9),
(60, 'Nd', 'Neodymium', 'Lanthanide', 6, 9),
(61, 'Pm', 'Promethium', 'Lanthanide', 7, 9),
(62, 'Sm', 'Samarium', 'Lanthanide', 8, 9),
(63, 'Eu', 'Europium', 'Lanthanide', 9, 9),
(64, 'Gd', 'Gadolinium', 'Lanthanide', 10, 9),
(65, 'Tb', 'Terbium', 'Lanthanide', 11, 9),
(66, 'Dy', 'Dysprosium', 'Lanthanide', 12, 9),
(67, 'Ho', 'Holmium', 'Lanthanide', 13, 9),
(68, 'Er', 'Erbium', 'Lanthanide', 14, 9),
(69, 'Tm', 'Thulium', 'Lanthanide', 15, 9),
(70, 'Yb', 'Ytterbium', 'Lanthanide', 16, 9),
(71, 'Lu', 'Lutetium', 'Lanthanide', 17, 9),
(72, 'Hf', 'Hafnium', 'Transition metal', 4, 6),
(73, 'Ta', 'Tantalum', 'Transition metal', 5, 6),
(74, 'W', 'Tungsten', 'Transition metal', 6, 6),
(75, 'Re', 'Rhenium', 'Transition metal', 7, 6),
(76, 'Os', 'Osmium', 'Transition metal', 8, 6),
(77, 'Ir', 'Iridium', 'Transition metal', 9, 6),
(78, 'Pt', 'Platinum', 'Transition metal', 10, 6),
(79, 'Au', 'Gold', 'Transition metal', 11, 6),
(80, 'Hg', 'Mercury', 'Post-transition metal', 12, 6),
(81, 'Tl', 'Thallium', 'Post-transition metal', 13, 6),
(82, 'Pb', 'Lead', 'Post-transition metal', 14, 6),
(83, 'Bi', 'Bismuth', 'Post-transition metal', 15, 6),
(84, 'Po', 'Polonium', 'Post-transition metal', 16, 6),
(85, 'At', 'Astatine', 'Halogen', 17, 6),
(86, 'Rn', 'Radon', 'Noble gas', 18, 6),
(87, 'Fr', 'Francium', 'Alkali metal', 1, 7),
(88, 'Ra', 'Radium', 'Alkaline earth metal', 2, 7),
(200000000000000000000000000000000000000000000000000, '_', 'Actinides', 'Actinide', 3, 7), #placeholder pour l'affichage du tableau
(89, 'Ac', 'Actinium', 'Actinide', 3, 10),
(90, 'Th', 'Thorium', 'Actinide', 4, 10),
(91, 'Pa', 'Protactinium', 'Actinide', 5, 10),
(92, 'U', 'Uranium', 'Actinide', 6, 10),
(93, 'Np', 'Neptunium', 'Actinide', 7, 10),
(94, 'Pu', 'Plutonium', 'Actinide', 8, 10),
(95, 'Am', 'Americium', 'Actinide', 9, 10),
(96, 'Cm', 'Curium', 'Actinide', 10, 10),
(97, 'Bk', 'Berkelium', 'Actinide', 11, 10),
(98, 'Cf', 'Californium', 'Actinide', 12, 10),
(99, 'Es', 'Einsteinium', 'Actinide', 13, 10),
(100, 'Fm', 'Fermium', 'Actinide', 14, 10),
(101, 'Md', 'Mendelevium', 'Actinide', 15, 10),
(102, 'No', 'Nobelium', 'Actinide', 16, 10),
(103, 'Lr', 'Lawrencium', 'Actinide', 17, 10),
(104, 'Rf', 'Rutherfordium', 'Transition metal', 4, 7),
(105, 'Db', 'Dubnium', 'Transition metal', 5, 7),
(106, 'Sg', 'Seaborgium', 'Transition metal', 6, 7),
(107, 'Bh', 'Bohrium', 'Transition metal', 7, 7),
(108, 'Hs', 'Hassium', 'Transition metal', 8, 7),
(109, 'Mt', 'Meitnerium', 'none', 9, 7),
(110, 'Ds', 'Darmstadtium', 'none', 10, 7),
(111, 'Rg', 'Roentgenium', 'none', 11, 7),
(112, 'Cn', 'Copernicium', 'Transition metal', 12, 7),
(113, 'Nh', 'Nihonium', 'none', 13, 7),
(114, 'Fl', 'Flerovium', 'none', 14, 7),
(115, 'Mc', 'Moscovium', 'none', 15, 7),
(116, 'Lv', 'Livermorium', 'none', 16, 7),
(117, 'Ts', 'Tennessine', 'none', 17, 7),
(118, 'Og', 'Oganesson', 'none', 18, 7),
]
buttons = {}
class PeriodicTableApp: #Création d'un objet
def __init__(self, master): #Fonction qui se lance automatiquement lors de la création de l'objet
self.master = master #Permet de combiner la fenêtre tkinter à l'objet
self.last_clicked = None #Création d'une variable pour stocker le dernier click effectué
for (num, sym, name, fam, col, row) in elements: #Parcourt la liste des éléments
btn = tk.Button(master, text=sym, width=5, height=2, font=("Georgia", 11, "bold"), command=lambda s=sym: self.on_click(s)) #Paramètres d'affichage du bouton
btn.grid(row=row, column=col) #Grille des boutons avec les coordonnées
buttons[sym] = btn
for (num, sym, name, fam, *_) in elements : #Donne une couleur au bouton selon le groupe de l'élément
if fam == "Halogen" :
buttons[sym].config(bg="yellow")
buttons[sym].config(fg="black")
elif fam == "Nonmetal" :
buttons[sym].config(bg="light green")
buttons[sym].config(fg="black")
elif fam == "Transition metal" :
buttons[sym].config(bg="pink")
buttons[sym].config(fg="black")
elif fam == "Noble gas" :
buttons[sym].config(bg="steelblue")
buttons[sym].config(fg="white")
elif fam == "Post-transition metal" :
buttons[sym].config(bg="gray")
buttons[sym].config(fg="black")
elif fam == "Metalloid" :
buttons[sym].config(bg="brown")
buttons[sym].config(fg="black")
elif fam == "Alkali metal" :
buttons[sym].config(bg="red")
buttons[sym].config(fg="black")
elif fam == "Alkaline earth metal" :
buttons[sym].config(bg="orange")
buttons[sym].config(fg="black")
elif fam == "Lanthanide" :
buttons[sym].config(bg="blue")
buttons[sym].config(fg="white")
elif fam == "Actinide" :
buttons[sym].config(bg="purple")
buttons[sym].config(fg="white")
elif fam == "none":
buttons[sym].config(fg="white")
buttons[sym].config(bg="black")
def on_click(self, symbol): #Fonction qui s'active lors d'un click sur un bouton
famille=""
for i in range(len(elements)) : #Parcourt la liste d'éléments
if symbol in elements[i] and len(symbol)==len(elements[i][1]) :
famille=elements[i][3]
name=elements[i][2]
num=elements[i][0]
buttons[symbol].config(bg="white") #Le bouton sélectionné devient blanc
if famille == "Halogen" :
buttons[symbol].config(fg="gold")
elif famille == "Nonmetal" :
buttons[symbol].config(fg="green")
elif famille == "Transition metal" :
buttons[symbol].config(fg="deeppink")
elif famille == "Noble gas" :
buttons[symbol].config(fg="steelblue")
elif famille == "Post-transition metal" :
buttons[symbol].config(fg="dimgray")
elif famille == "Metalloid" :
buttons[symbol].config(fg="brown")
elif famille == "Alkali metal" :
buttons[symbol].config(fg="red")
elif famille == "Alkaline earth metal" :
buttons[symbol].config(fg="darkorange")
elif famille == "Lanthanide" :
buttons[symbol].config(fg="blue")
elif famille == "Actinide" :
buttons[symbol].config(fg="purple")
elif famille == "none":
buttons[symbol].config(fg="black")
# buttons[symbol].config(fg="black") #Le texte du bouton sélectionné devient noir
self.last_clicked = symbol #Stocke le symbole dans la variable
print("Clic sur :", name, "-", symbol, "-", num, f"({famille})") #Affiche dans le terminal l'élément clické (symbol)
reponse = messagebox.askokcancel("Group of the element ?", f"Click on {name} ({symbol}), Do you want to select the rest of the group ({famille})?")
if reponse is True :
for (num, sym, name, fam, *_) in elements :
if fam == famille : #Sélection du groupe entier
buttons[sym].config(bg="white")
if famille == "Halogen" :
buttons[sym].config(fg="gold")
elif famille == "Nonmetal" :
buttons[sym].config(fg="green")
elif famille == "Transition metal" :
buttons[sym].config(fg="deeppink")
elif famille == "Noble gas" :
buttons[sym].config(fg="steelblue")
elif famille == "Post-transition metal" :
buttons[sym].config(fg="dimgray")
elif famille == "Metalloid" :
buttons[sym].config(fg="brown")
elif famille == "Alkali metal" :
buttons[sym].config(fg="red")
elif famille == "Alkaline earth metal" :
buttons[sym].config(fg="darkorange")
elif famille == "Lanthanide" :
buttons[sym].config(fg="blue")
elif famille == "Actinide" :
buttons[sym].config(fg="purple")
elif famille == "none":
buttons[sym].config(fg="black")
# buttons[sym].config(fg="black")
print(f"Selecting the {famille} group")
reponse2 = messagebox.askokcancel("Group engraving", f"Click on {famille}, create a file ?")
if reponse2 is True :
list_col=[[] for i in range(18)]
for (num, sym, name, fam, col, row) in elements :
if fam == famille : #Boucle pour la création d'une liste regroupant les infos du groupe sélectionné
if sym == "-" or sym == "_":
continue #Exclut les placholders s'il y en a
list_data=[]
list_data.append(sym)
list_data.append(num)
list_data.append(name)
list_data.append(fam)
list_data.append(col)
list_data.append(row)
list_col[col-1].append(list_data)
print(list_col)
#Création du .svg
width_mm = 600
height_mm = 300
square_size=80
square_sizeh=60
stroke_width=1
svg_content = f'''<?xml version="1.0" encoding="UTF-8"?>
<svg xmlns="http://www.w3.org/2000/svg" width="600mm" height="300mm">
'''
for i in range(len(list_col)):
for j in range(len(list_col[i])):
x = 50 + i * square_size # Each square starts exactly where previous ends
y = 50 + list_col[i][j][5] * square_sizeh
svg_content += f' <rect x="{x}" y="{y}" width="{square_size}" height="{square_sizeh}" fill="none" stroke="blue" stroke-width="{stroke_width}"/>'
svg_content += f' <rect x="{x}" y="{y+700}" width="{square_size}" height="{square_sizeh}" fill="none" stroke="red" stroke-width="{stroke_width}"/>'
text_x=x+square_size/2
text_y=y+square_sizeh/2
text_content_sym = str(list_col[i][j][0])
if len(str(list_col[i][j][0]))==1:
font_size = square_size * 0.55
if len(str(list_col[i][j][0]))==2:
font_size = square_size * 0.50
svg_content += f''' <text x="{text_x-0.1}" y="{text_y-4}"
text-anchor="middle" dominant-baseline="middle"
font-size="{font_size}" font-family="Elephant" fill="black">{text_content_sym}</text>
'''
text_content_num = str(list_col[i][j][1])
if len(str(list_col[i][j][1]))==1:
font_size = square_size * 0.68
if len(str(list_col[i][j][1]))==2:
font_size = square_size * 0.63
if len(str(list_col[i][j][1]))==3:
font_size = square_size * 0.48
svg_content += f''' <text x="{text_x}" y="{text_y}"
text-anchor="middle" dominant-baseline="middle"
font-size="{font_size}" font-family="Elephant" fill="none" stroke="blue" stroke-width="{stroke_width * 0.3}">{text_content_num}</text>
'''
text_content_name = str(list_col[i][j][2])
if len(str(list_col[i][j][2]))>4 and len(str(list_col[i][j][2]))<9:
font_size = (square_size * 0.2)/(len(str(list_col[i][j][2]))*0.18)
elif len(str(list_col[i][j][2]))<5 :
font_size = (square_size * 0.2)/(len(str(list_col[i][j][2]))*0.3)
elif len(str(list_col[i][j][2]))>5 :
font_size = (square_size * 0.2)/(len(str(list_col[i][j][2]))*0.14)
svg_content += f''' <text x="{text_x-0.1}" y="{text_y+19}"
text-anchor="middle" dominant-baseline="middle"
font-size="{font_size}" font-family="Elephant" fill="black">{text_content_name}</text>
'''
svg_content += '</svg>'
with open(f'{famille}grp.svg', 'w') as f:
f.write(svg_content)
print(f"SVG created: {famille}grp")
os.startfile(f"D:/fbalba/prog/{famille}grp.svg") #Ouvre le .svg
if reponse2 is False : #Pour que les boutons récupèrent leur couleur originale s'ils ne sont plus sélectionnés
for (num, sym, name, fam, *_) in elements :
if fam == famille :
if famille == "Halogen" :
buttons[sym].config(bg="yellow")
buttons[sym].config(fg="black")
elif famille == "Nonmetal" :
buttons[sym].config(bg="light green")
buttons[sym].config(fg="black")
elif famille == "Transition metal" :
buttons[sym].config(bg="pink")
buttons[sym].config(fg="black")
elif famille == "Noble gas" :
buttons[sym].config(bg="steelblue")
buttons[sym].config(fg="white")
elif famille == "Post-transition metal" :
buttons[sym].config(bg="gray")
buttons[sym].config(fg="black")
elif famille == "Metalloid" :
buttons[sym].config(bg="brown")
buttons[sym].config(fg="black")
elif famille == "Alkali metal" :
buttons[sym].config(bg="red")
buttons[sym].config(fg="black")
elif famille == "Alkaline earth metal" :
buttons[sym].config(bg="orange")
buttons[sym].config(fg="black")
elif famille == "Lanthanide" :
buttons[sym].config(bg="blue")
buttons[sym].config(fg="white")
elif famille == "Actinide" :
buttons[sym].config(bg="purple")
buttons[sym].config(fg="white")
elif famille == "none":
buttons[sym].config(fg="white")
buttons[sym].config(bg="black")
if reponse is False :
reponse3 = messagebox.askokcancel("Element engraving", f"Click on {name} ({symbol}), create a file ?")
if reponse3 is True :
JSON_PATH = f"{symbol}.json" #Crée un fichier .json
with open(JSON_PATH, "w", encoding="utf-8") as f: #Rédige le .json avec la case à cliquer
json.dump({"symbol": symbol}, f, ensure_ascii=False, indent=2)
subprocess.Popen(["start", "powershell", "-NoExit", "-Command", "python updaterunna.py"], shell=True)
# la ligne précédente ouvre un autre powershell et lance updaterunna.py dans celui-ci. Ce porgramme lit ensuite le .json le plus récent du dossier pour cliquer la case voulue.
if reponse3 is False : #Pour que les boutons récupèrent leur couleur originale s'ils ne sont plus sélectionnés
if famille == "Halogen" :
buttons[symbol].config(bg="yellow")
buttons[symbol].config(fg="black")
elif famille == "Nonmetal" :
buttons[symbol].config(bg="light green")
buttons[symbol].config(fg="black")
elif famille == "Transition metal" :
buttons[symbol].config(bg="pink")
buttons[symbol].config(fg="black")
elif famille == "Noble gas" :
buttons[symbol].config(bg="steelblue")
buttons[symbol].config(fg="white")
elif famille == "Post-transition metal" :
buttons[symbol].config(bg="gray")
buttons[symbol].config(fg="black")
elif famille == "Metalloid" :
buttons[symbol].config(bg="brown")
buttons[symbol].config(fg="black")
elif famille == "Alkali metal" :
buttons[symbol].config(bg="red")
buttons[symbol].config(fg="black")
elif famille == "Alkaline earth metal" :
buttons[symbol].config(bg="orange")
buttons[symbol].config(fg="black")
elif famille == "Lanthanide" :
buttons[symbol].config(bg="blue")
buttons[symbol].config(fg="white")
elif famille == "Actinide" :
buttons[symbol].config(bg="purple")
buttons[symbol].config(fg="white")
elif famille == "none":
buttons[symbol].config(fg="white")
buttons[symbol].config(bg="black")
root = tk.Tk() #Permet de créer la fenêtre
root.configure(bg="white")
root.title("Periodic Table") #Nom de la fenêtre
app = PeriodicTableApp(root) #Permet à l'objet PeriodicTableApp de s'afficher dans la fenêtre
root.mainloop() #Fait fonctionner la fenêtre jusqu'à sa fermeture
Updaterunna.py : Pour les cubes
lignes 298, 300, 302, 413 et 415 à adapter
import tkinter as tk #Sert à la création d'interfaces
from tkinter import messagebox
import os #Pour les opérations relatives aux chemins et les emplacements des fichiers
import matplotlib.pyplot as plt #Pour les créations de grahiques
import shutil #Utilisé pour la copie et le déplacement de fichiers
import xml.etree.ElementTree as ET #Pour l'intéraction avec Inkscape
import base64
import numpy as np #Bibliothèque mathématique
import sys
import json
import glob
import time
## liste des 118 éléments avec Numéro, Symbole, Noms en anglais, français, chinois, russe et espagnol. Les deux nombres ensuite sont les coordonnés dans le tableau.
elements = [
(1, "H", ("Hydrogen","Hydrogène","氢","الهيدروجين","Водород","Hidrógeno"), 1, 1),
(2, "He", ("Helium","Hélium","氦","الهيليوم","Гелий","Helio"), 18, 1),
(3, "Li", ("Lithium","Lithium","锂","الليثيوم","Литий","Litio"), 1, 2),
(4, "Be", ("Beryllium","Béryllium","铍","البريليوم","Бериллий","Berilio"), 2, 2),
(5, "B", ("Boron","Bore","硼","البورون","Бор","Boro"), 13, 2),
(6, "C", ("Carbon","Carbone","碳","الكربون","Углерод","Carbono"), 14, 2),
(7, "N", ("Nitrogen","Azote","氮","النيتروجين","Азот","Nitrógeno"), 15, 2),
(8, "O", ("Oxygen","Oxygène","氧","الأكسجين","Кислород","Oxígeno"), 16, 2),
(9, "F", ("Fluorine","Fluor","氟","الفلور","Фтор","Flúor"), 17, 2),
(10, "Ne", ("Neon","Néon","氖","النيون","Неон","Neón"), 18, 2),
(11, "Na", ("Sodium","Sodium","钠","الصوديوم","Натрий","Sodio"), 1, 3),
(12, "Mg", ("Magnesium","Magnésium","镁","المغنيسيوم","Магний","Magnesio"), 2, 3),
(13, "Al", ("Aluminum","Aluminium","铝","الألومنيوم","Алюминий","Aluminio"), 13, 3),
(14, "Si", ("Silicon","Silicium","硅","السيليكون","Кремний","Silicio"), 14, 3),
(15, "P", ("Phosphorus","Phosphore","磷","الفوسفور","Фосфор","Fósforo"), 15, 3),
(16, "S", ("Sulfur","Soufre","硫","الكبريت","Сера","Azufre"), 16, 3),
(17, "Cl", ("Chlorine","Chlore","氯","الكلور","Хлор","Cloro"), 17, 3),
(18, "Ar", ("Argon","Argon","氩","الأرجون","Аргон","Argón"), 18, 3),
(19, "K", ("Potassium","Potassium","钾","البوتاسيوم","Калий","Potasio"), 1, 4),
(20, "Ca", ("Calcium","Calcium","钙","الكالسيوم","Кальций","Calcio"), 2, 4),
(21, "Sc", ("Scandium","Scandium","钪","الإسكنديوم","Скандий","Escandio"), 3, 4),
(22, "Ti", ("Titanium","Titane","钛","التيتانيوم","Титан","Titanio"), 4, 4),
(23, "V", ("Vanadium","Vanadium","钒","الفاناديوم","Ванадий","Vanadio"), 5, 4),
(24, "Cr", ("Chromium","Chrome","铬","الكروم","Хром","Cromo"), 6, 4),
(25, "Mn", ("Manganese","Manganèse","锰","المنغنيز","Марганец","Manganeso"), 7, 4),
(26, "Fe", ("Iron","Fer","铁","الحديد","Железо","Hierro"), 8, 4),
(27, "Co", ("Cobalt","Cobalt","钴","الكوبالت","Кобальт","Cobalto"), 9, 4),
(28, "Ni", ("Nickel","Nickel","镍","النيكل","Никель","Níquel"), 10, 4),
(29, "Cu", ("Copper","Cuivre","铜","النحاس","Медь","Cobre"), 11, 4),
(30, "Zn", ("Zinc","Zinc","锌","الزنك","Цинк","Zinc"), 12, 4),
(31, "Ga", ("Gallium","Gallium","镓","الغاليوم","Галлий","Galio"), 13, 4),
(32, "Ge", ("Germanium","Germanium","锗","الجرمانيوم","Германий","Germanio"), 14, 4),
(33, "As", ("Arsenic","Arsenic","砷","الزرنيخ","Мышьяк","Arsénico"), 15, 4),
(34, "Se", ("Selenium","Sélénium","硒","السيلينيوم","Селен","Selenio"), 16, 4),
(35, "Br", ("Bromine","Brome","溴","البروم","Бром","Bromo"), 17, 4),
(36, "Kr", ("Krypton","Krypton","氪","الكريبتون","Криптон","Kriptón"), 18, 4),
(37, "Rb", ("Rubidium","Rubidium","铷","الروبيديوم","Рубидий","Rubidio"), 1, 5),
(38, "Sr", ("Strontium","Strontium","锶","السترونشيوم","Стронций","Estroncio"), 2, 5),
(39, "Y", ("Yttrium","Yttrium","钇","الإيتريوم","Иттрий","Itrio"), 3, 5),
(40, "Zr", ("Zirconium","Zirconium","锆","الزركونيوم","Цирконий","Circonio"), 4, 5),
(41, "Nb", ("Niobium","Niobium","铌","النيوبيوم","Ниобий","Niobio"), 5, 5),
(42, "Mo", ("Molybdenum","Molybdène","钼","الموليبدينوم","Молибден","Molibdeno"), 6, 5),
(43, "Tc", ("Technetium","Technétium","锝","التكنيتيوم","Технеций","Tecnecio"), 7, 5),
(44, "Ru", ("Ruthenium","Ruthénium","钌","الروثينيوم","Рутений","Rutenio"), 8, 5),
(45, "Rh", ("Rhodium","Rhodium","铑","الروديوم","Родий","Rodio"), 9, 5),
(46, "Pd", ("Palladium","Palladium","钯","البلاديوم","Палладий","Paladio"), 10, 5),
(47, "Ag", ("Silver","Argent","银","الفضة","Серебро","Plata"), 11, 5),
(48, "Cd", ("Cadmium","Cadmium","镉","الكادميوم","Кадмий","Cadmio"), 12, 5),
(49, "In", ("Indium","Indium","铟","الإنديوم","Индий","Indio"), 13, 5),
(50, "Sn", ("Tin","Étain","锡","القصدير","Олово","Estaño"), 14, 5),
(51, "Sb", ("Antimony","Antimoine","锑","الأنتيمون","Сурьма","Antimonio"), 15, 5),
(52, "Te", ("Tellurium","Tellure","碲","التيلوريوم","Теллур","Telurio"), 16, 5),
(53, "I", ("Iodine","Iode","碘","اليود","Йод","Yodo"), 17, 5),
(54, "Xe", ("Xenon","Xénon","氙","الزينون","Ксенон","Xenón"), 18, 5),
(55, "Cs", ("Cesium","Césium","铯","السيزيوم","Цезий","Cesio"), 1, 6),
(56, "Ba", ("Barium","Baryum","钡","الباريوم","Барий","Bario"), 2, 6),
# Lanthanides
(57, "La", ("Lanthanum","Lanthane","镧","اللانثانوم","Лантан","Lantano"), 3, 9),
(58, "Ce", ("Cerium","Cérium","铈","السيريوم","Церий","Cerio"), 4, 9),
(59, "Pr", ("Praseodymium","Praséodyme","镨","البراسيوديميوم","Празеодим","Praseodimio"), 5, 9),
(60, "Nd", ("Neodymium","Néodyme","钕","النيوديميوم","Неодим","Neodimio"), 6, 9),
(61, "Pm", ("Promethium","Prométhium","钷","البروميثيوم","Прометий","Prometio"), 7, 9),
(62, "Sm", ("Samarium","Samarium","钐","الساماريوم","Самарий","Samario"), 8, 9),
(63, "Eu", ("Europium","Europium","铕","اليوروبيوم","Европий","Europio"), 9, 9),
(64, "Gd", ("Gadolinium","Gadolinium","钆","الغادولينيوم","Гадолиний","Gadolinio"), 10, 9),
(65, "Tb", ("Terbium","Terbium","铽","التيربيوم","Тербий","Terbio"), 11, 9),
(66, "Dy", ("Dysprosium","Dysprosium","镝","الديسبروسيوم","Диспрозий","Disprosio"), 12, 9),
(67, "Ho", ("Holmium","Holmium","钬","الهولميوم","Гольмий","Holmio"), 13, 9),
(68, "Er", ("Erbium","Erbium","铒","الإربيوم","Эрбий","Erbio"), 14, 9),
(69, "Tm", ("Thulium","Thulium","铥","الثوليوم","Туллий","Tulio"), 15, 9),
(70, "Yb", ("Ytterbium","Ytterbium","镱","الإيتربيوم","Иттербий","Iterbio"), 16, 9),
(71, "Lu", ("Lutetium","Lutécium","镥","اللوتيتيوم","Лютеций","Lutecio"), 17, 9),
(72, "Hf", ("Hafnium","Hafnium","铪","الهافنيوم","Гафний","Hafnio"), 4, 6),
(73, "Ta", ("Tantalum","Tantale","钽","التنتالوم","Тантал","Tantalio"), 5, 6),
(74, "W", ("Tungsten","Tungstène","钨","التنغستن","Вольфрам","Wolframio"), 6, 6),
(75, "Re", ("Rhenium","Rhénium","铼","الرينيوم","Рений","Renio"), 7, 6),
(76, "Os", ("Osmium","Osmium","锇","الأوزميوم","Осмий","Osmio"), 8, 6),
(77, "Ir", ("Iridium","Iridium","铱","الإيريديوم","Иридий","Iridio"), 9, 6),
(78, "Pt", ("Platinum","Platine","铂","البلاتين","Платина","Platino"), 10, 6),
(79, "Au", ("Gold","Or","金","الذهب","Золото","Oro"), 11, 6),
(80, "Hg", ("Mercury","Mercure","汞","الزئبق","Ртуть","Mercurio"), 12, 6),
(81, "Tl", ("Thallium","Thallium","铊","الثاليوم","Таллий","Talio"), 13, 6),
(82, "Pb", ("Lead","Plomb","铅","الرصاص","Свинец","Plomo"), 14, 6),
(83, "Bi", ("Bismuth","Bismuth","铋","البزموت","Висмут","Bismuto"), 15, 6),
(84, "Po", ("Polonium","Polonium","钋","البولونيوم","Полоний","Polonio"), 16, 6),
(85, "At", ("Astatine","Astate","砹","الأستاتين","Астат","Astato"), 17, 6),
(86, "Rn", ("Radon","Radon","氡","الرادون","Радон","Radón"), 18, 6),
(87, "Fr", ("Francium","Francium","钫","الفرانسيوم","Франций","Francio"), 1, 7),
(88, "Ra", ("Radium","Radium","镭","الراديوم","Радий","Radio"), 2, 7),
# Actinides
(89, "Ac", ("Actinium","Actinium","锕","الأكتينيوم","Актиний","Actinio"), 3, 10),
(90, "Th", ("Thorium","Thorium","钍","الثوريوم","Торий","Torio"), 4, 10),
(91, "Pa", ("Protactinium","Protactinium","镤","البروتاكتينيوم","Протактиний","Protactinio"), 5, 10),
(92, "U", ("Uranium","Uranium","铀","اليورانيوم","Уран","Uranio"), 6, 10),
(93, "Np", ("Neptunium","Neptunium","镎","النيبتونيوم","Нептуний","Neptunio"), 7, 10),
(94, "Pu", ("Plutonium","Plutonium","钚","البلوتونيوم","Плутоний","Plutonio"), 8, 10),
(95, "Am", ("Americium","Américium","镅","الأميريكيوم","Америций","Americio"), 9, 10),
(96, "Cm", ("Curium","Curium","锔","الكوريوم","Кюрий","Curio"), 10, 10),
(97, "Bk", ("Berkelium","Berkelium","锫","البركيليوم","Берклий","Berkelio"), 11, 10),
(98, "Cf", ("Californium","Californium","锎","الكاليفورنيوم","Калифорний","Californio"), 12, 10),
(99, "Es", ("Einsteinium","Einsteinium","锿","الآينشتينيوم","Эйнштейний","Einsteinio"), 13, 10),
(100, "Fm", ("Fermium","Fermium","镄","الفرميوم","Фермий","Fermio"), 14, 10),
(101, "Md", ("Mendelevium","Mendélévium","钔","المندليفيوم","Менделевий","Mendelevio"), 15, 10),
(102, "No", ("Nobelium","Nobélium","锘","النوبليوم","Нобелий","Nobelio"), 16, 10),
(103, "Lr", ("Lawrencium","Lawrencium","铹","اللورنسيوم","Лоуренсий","Laurencio"), 17, 10),
(104, "Rf", ("Rutherfordium","Rutherfordium","𬬭","الرذرفورديوم","Резерфордий","Rutherfordio"), 4, 7),
(105, "Db", ("Dubnium","Dubnium","𬭊","الدوبنيوم","Дубний","Dubnio"), 5, 7),
(106, "Sg", ("Seaborgium","Seaborgium","𬭳","السيبورغيوم","Сиборгий","Seaborgio"), 6, 7),
(107, "Bh", ("Bohrium","Bohrium","𬭛","البوهريوم","Борий","Bohrio"), 7, 7),
(108, "Hs", ("Hassium","Hassium","𬭶","الهسيوم","Хассий","Hassio"), 8, 7),
(109, "Mt", ("Meitnerium","Meitnerium","𬭸","الميتنيريوم","Мейтнерий","Meitnerio"), 9, 7),
(110, "Ds", ("Darmstadtium","Darmstadtium","𬭼","دارمشتاتيوم","Дармштадтий","Darmstadtio"), 10, 7),
(111, "Rg", ("Roentgenium","Roentgenium","𬭩","الرونتجينيوم","Рентгений","Roentgenio"), 11, 7),
(112, "Cn", ("Copernicium","Copernicium","𬭳","الكوبرنيسيوم","Коперниций","Copernicio"), 12, 7),
(113, "Nh", ("Nihonium","Nihonium","𬭭","النيهونيوم","Нихоний","Nihonio"), 13, 7),
(114, "Fl", ("Flerovium","Flérovium","𬭫","الفليروفيوم","Флеровий","Flerovio"), 14, 7),
(115, "Mc", ("Moscovium","Moscovium","𬭬","الموسكوفيوم","Московий","Moscovio"), 15, 7),
(116, "Lv", ("Livermorium","Livermorium","𬭳","الليفرموريوم","Ливерморий","Livermorio"), 16, 7),
(117, "Ts", ("Tennessine","Tennessine","𬭸","التينيسين","Теннессин","Tenesino"), 17, 7),
(118, "Og", ("Oganesson","Oganesson","𬭛","الأوجانيسون","Оганессон","Oganesón"), 18, 7)
]
def get_last_json(folder="."): # récupère le dernier .json crée dans le dossier
# récupére tous les fichiers .json dans le dossier
files = glob.glob(os.path.join(folder, "*.json"))
if not files:
return None # aucun fichier trouvé
# trie par date de modification (du plus récent au plus ancien)
files.sort(key=os.path.getmtime, reverse=True)
return files[0] # le plus récent
## Donne la configuration électronique en fonction du nombre d'électron Z donné.
def Config(Z):
orbitales = ["1s", "2s", "2p", "3s", "3p", "4s","3d", "4p", "5s", "4d", "5p", "6s","4f", "5d", "6p", "7s", "5f", "6d", "7p"]
max_elec = {"s": 2,"p": 6,"d": 10,"f": 14} #bombre max d'électrons par couche
config = []
reste = Z
for orb in orbitales: #Parcourt la liste des orbitales
l = orb[-1] #Identifie le type de sous-couche: s, p, d, f
n = min(max_elec[l], reste) #Compte le nombre d'électrons dans la sous-couche
config.append([f"{orb}",n]) #Sauvegarge dans la liste config de l'orbitale te de son remplissage
reste -= n #Retire le nombre d'électrons ajoutés à la sous-couche
if reste <= 0: #Fin du parcourt des orbitales quand il n'y a plus d'électrons à répartir
break
print('Configuration électronique :',config) #Affiche les résultats de configuration
return config #Renvoie les résultats de configuration sous forme de liste
## Trace le modèle de Borh d'un atome, avec son nom et son symbole, à but illustratif
def traceur1(Z,name,symbol) :
orbits = Config(Z) #Fait appel à la fonction Config() et stocke le résultat dans la variable orbits
population = [0 for i in range(7)] #Crée une liste de 0 (Longueur de 7) (les couches de 1 à 7)
for orb in orbits : #Parcourt la liste orbits
n = int(orb[0][0]) #Lit la couche orbitale "1" dans la notation "1s" par exemple
population[n-1]+=orb[1] #Ajoute le nombre d'électrons dans la coche correspondante
print('Population :',population) #Affiche la répartition de population par couche
fig, ax = plt.subplots() #Création du graphique
rayons=np.linspace(1,7,7,dtype=int) #Création d'une liste de 7 valeurs (pour les rayons des cercles)
for r, n_e in zip(rayons, population): #Parcourt les couches de 1 à 7 et la liste des rayons en même temps
if n_e!=0 : #Ne trace le cercle que si le nombre d'électrons est supérireur à 0
cercle = plt.Circle((0, 0), r, fill=False) #Créé un cercle de rayon r et de centre 0,0
ax.add_patch(cercle) #Ajoute le cercle sur le graphe
angles = np.linspace(0, 2*np.pi, n_e, endpoint=False) #Calcule les angles pour répartir les n électrons de la couche sur le cercle
x = r * np.cos(angles) #Ces deux lignes placent les électrons sur les cercles
y = r * np.sin(angles)
ax.scatter(x, y, s=50) # s=taille du point
nucleus = plt.Circle((0, 0), 0.2, color=(0,0,1)) #Crée le noyau
ax.add_patch(nucleus) #Ajoute le noyau
ax.set_aspect('equal', 'box') #Fait une boite carrée pour l'affichage du graphique
ax.set_xlim(-max(rayons)-1, max(rayons)+1) #Fixe les limites de l'axe x
ax.set_ylim(-max(rayons)-1, max(rayons)+1) #Fixe les limites de l'axe y
ax.set_xticks([]) #Enlève les graduations de l'axe x
ax.set_yticks([]) #Enlève les graduations de l'axe x
plt.title(f"Modèle de Bohr - {name} ({symbol})") #Titre
plt.show(block=False) #Affiche le graphique dans une nouvelle fenêtre et ne bloque pas la suite de l'execution su programme
## Trace le modèle de Borh d'un atome, et l'enregistre en png dans le dossier actif
def traceur2(Z,name) :
orbits = Config(Z)
population = [0 for i in range(7)]
for orb in orbits :
n = int(orb[0][0])
population[n-1]+=orb[1]
fig, ax = plt.subplots()
rayons=np.linspace(1,7,7,dtype=int)
for r, n_e in zip(rayons, population):
if n_e!=0 :
cercle = plt.Circle((0, 0), r, fill=False)
ax.add_patch(cercle)
angles = np.linspace(0, 2*np.pi, n_e, endpoint=False)
x = r * np.cos(angles)
y = r * np.sin(angles)
ax.scatter(x, y, s=50) # s=taille du point
nucleus = plt.Circle((0, 0), 0.2, color=(0,0,1))
ax.add_patch(nucleus)
ax.set_aspect('equal', 'box')
plt.axis('off') #Enlève les axes
ax.set_xlim(-max(rayons)-1, max(rayons)+1)
ax.set_ylim(-max(rayons)-1, max(rayons)+1)
ax.set_xticks([])
ax.set_yticks([])
plt.savefig(f'orb_{name}') #Sauvegarde la figure sous le nom 'orb_[nom de l'atome]'
plt.close() #Ferme la figure après l'enregistrement
buttons = {}
class PeriodicTableApp: #Création d'un objet
def __init__(self, master): #Fonction qui se lance automatiquement lors de la création de l'objet
self.master = master #Permet de combiner la fenêtre tkinter à l'objet
self.last_clicked = None #Création d'une variable pour stocker le dernier click effectué
for (num, sym, name, col, row) in elements: #Parcourt la liste des éléments
btn = tk.Button(master, text=sym, width=5, height=2, font=("Georgia", 11, "bold"),
command=lambda s=sym: self.on_click(s)) #Paramètres d'affichage du bouton
btn.grid(row=row, column=col) #Grille des boutons avec les coordonnées
buttons[sym] = btn
# sym_clicked = sys.argv[1] if len(sys.argv) > 1 else None
def on_click(self, symbol): #Fonction qui s'active lors d'un click sur un bouton
buttons[symbol].config(bg="red")
name='' #Crée une variable string vide
self.last_clicked = symbol #Stocke le symbole dans la variable
print("Clic sur :", symbol) #Affiche dans le terminal l'élément clické (symbol)
for i in range(len(elements)) : #Parcourt la liste d'éléments
if symbol in elements[i] and len(symbol)==len(elements[i][1]) : #Cherche le symbole clické dans la liste
name = elements[i][2][1] #Récupère le nom
print(name) #Affiche le nom
os.makedirs(f"{symbol}_box", exist_ok=True) #Créé un dossier dans le dossier actif en fonction du symbole
#Les lignes suivantes servent à copier un template .svg dans le dossier récement crée. Il convient de modifier les chemins comme necessaire.
# os.chdir(f"C:/Users/uilisateur/Desktop/SC_HM/prog/{symbol}_box") #Change le dossier actif à celui designé (celui de l'élément)
os.chdir(f"D:/fbalba/prog/{symbol}_box")
# src=f"C:/Users/uilisateur/Desktop/SC_HM/prog/BasedBox15mm.svg" #Création de stings avec des emplacements de fichiers
src=f"D:/fbalba/prog/BasedBox15mm.svg"
# dst=f"C:/Users/uilisateur/Desktop/SC_HM/prog/{symbol}_box/{symbol}_box.svg"
dst=f"D:/fbalba/prog/{symbol}_box/{symbol}_box.svg"
shutil.copy(src,dst) #Commande pour copier le fichier choisi dans le nouvel emplacement
for i in range(len(elements)): #Parcourt la liste des éléments
if symbol in elements[i] and len(symbol)==len(elements[i][1]) : #Cherche le symbole clické dans la liste
traceur1(elements[i][0],elements[i][2][1],elements[i][1]) #Execute les fonctions traceur avec les bons arguments
traceur2(elements[i][0],elements[i][2][1])
tree = ET.parse(f"{symbol}_box.svg") #Charge un fichier .svg et permet de travailler avec en python
root = tree.getroot() #Necessaire pour modifier le fichier
ns = {"svg": "http://www.w3.org/2000/svg"} #ns=Namespace : Dictionnaire qui contient des spcéciations concernant les .svg
ET.register_namespace("", ns["svg"]) #Permet au code d'utiliser le namespace
for i in range(len(elements)):
if symbol in elements[i] and len(symbol)==len(elements[i][1]) :
if len(elements[i][1])==1 : #Change la taille de police selon la longueur du symbole
symb = ET.Element("{http://www.w3.org/2000/svg}text", { #Mise en forme du texte voulu, ici le symbole
"x": "25.1", # X position
"y": "33", # Y position
"font-size": "17",
"font-family": "Elephant",
"fill": "black",
"text-anchor": "middle"
})
symb.text = f"{elements[i][1]}"
root.append(symb)
else :
symb = ET.Element("{http://www.w3.org/2000/svg}text", {
"x": "25.1", # X position
"y": "33", # Y position
"font-size": "14",
"font-family": "Elephant",
"fill": "black",
"text-anchor": "middle"
})
symb.text = f"{elements[i][1]}"
root.append(symb)
for j in range(len(elements[i][2])): #Ajoute les noms dans les différentes langues
ypos=54+4*j
text = ET.Element("{http://www.w3.org/2000/svg}text", {
"x": "56.74", # X position
"y": str(ypos), # Y position
"font-size": "4",
"font-family": "Elephant",
"font-weight": "bold",
"fill": "black",
"text-anchor": "middle"
})
text.text = f"{elements[i][2][j]}"
root.append(text)
eng=ET.Element("{http://www.w3.org/2000/svg}text", { #Ajoute le numéro atomique
"x": "25.1",
"y": "38",
"font-size": "4.5",
"font-family": "Elephant",
"fill": "black",
"text-anchor": "middle"
})
eng.text = f"{elements[i][2][0]}"
root.append(eng)
num=ET.Element("{http://www.w3.org/2000/svg}text", { #Ajoute le numéro atomique
"x": "25.1",
"y": "103",
"font-size": "17",
"font-family": "Elephant",
"fill": "black",
"text-anchor": "middle"
})
num.text = f"{elements[i][0]}"
root.append(num)
number=ET.Element("{http://www.w3.org/2000/svg}text", { #Ajoute le mot "Number"
"x": "25.1",
"y": "87",
"font-size": "6",
"font-family": "Elephant",
"fill": "black",
"text-anchor": "middle"
})
number.text = "Number"
root.append(number)
with open(f"orb_{name}.png", "rb") as f: #Ajoute le modèle de Bohr enregistré dans le dossier actif
orb_data = f.read()
encoded_orb = base64.b64encode(orb_data).decode("utf-8")
orb = ET.Element("{http://www.w3.org/2000/svg}image", {
"x": "80",
"y": "80",
"width": "200",
"height": "200",
"href": f"data:image/png;base64,{encoded_orb}"
})
root.append(orb)
watermark=ET.Element("{http://www.w3.org/2000/svg}text", { #Ajoute le texte "Fait avec Python"
"x": "130",
"y": "125",
"font-size": "10",
"font-family": "Elephant",
"fill": "black",
"text-anchor": "middle"
})
watermark.text = "Fait avec Python"
root.append(watermark)
tree.write(f"{symbol}_box.svg", encoding="utf-8", xml_declaration=True)
# os.chdir(f"C:/Users/uilisateur/Desktop/SC_HM/prog") #Remet le dossier parent comme actif
os.chdir(f"D:/fbalba/prog")
# os.startfile(f"C:/Users/uilisateur/Desktop/SC_HM/prog/{symbol}_box/{symbol}_box.svg") #Ouvre le fichier .svg qui vient d'être modifié
os.startfile(f"D:/fbalba/prog/{symbol}_box/{symbol}_box.svg")
JSON_PATH = None
while JSON_PATH is None:
JSON_PATH = get_last_json()
time.sleep(0.1)
with open(JSON_PATH, "r", encoding="utf-8") as f:
data = json.load(f) #lit le fichier .json
root = tk.Tk() #Permet de créer la fenêtre
root.configure(bg="white")
root.title("Tableau Périodique") #Nom de la fenêtre
app = PeriodicTableApp(root) #Permet à l'objet PeriodicTableApp de s'afficher dans la fenêtre
sym_clicked = data.get("symbol", None).strip()
print(sym_clicked)
#print(buttons)
if sym_clicked in buttons:
root.after(1000, lambda: buttons[sym_clicked].invoke()) #simule un clic sur le bouton correspondant
root.mainloop() #Fait fonctionner la fenêtre jusqu'à sa fermeture
print("Valeur finale :", app.last_clicked) #Affiche la denière case clickée lors de la fermeture