Séance 3 : Dessin 2D, 3D, impression 3D et découpe laser
Lors de cette séance, nous avons découvert certains logiciels libres et gratuits de dessin et modélisation 3D. Des tutoriels pour chacun de ces logiciels sont disponibles sur le Wiki du FABLAB ou sur Internet.
La logiciel principalement utilisé pour la découpe laser est le logiciel **Inkscape**. Afin que le dessin réalisé soit exploitable, il faut s'assurer que l'épaisseur du trait soit toujours de 1px. En ce qui concerne la couleur des traits, le rouge correspond à la découpe alors que le noir fait référence à la gravure. Le plus important lors de l'utilisation de ce logiciel est de contrôler les dimensions et le positionnement des différents objets. Le format lu par les découpes laser est le **format SVG**.
Nous avons réalisé ce dessin lors de notre découverte du logiciel.
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2023-03/screenshot-20230206-101417.png)
Nous avons ensuite été initiées à 2 logiciels de modélisation 3D : **OpenSCAD** et **FreeCAD**. Ces logiciels sont utilisés dans le cadre d'impressions 3D. Pour cela, il est important de savoir que le format lu par les imprimantes est le **format STL**. Nous nous limiterons à l'utilisation du workbench **Part** dans FreeCAD. Afin de se familiariser avec les outils des deux logiciels, nous avons essayé de réaliser un cube de 50mm de côté troué par 3 cylindres de 20mm de diamètre.
Sur OpenSCAD :
```C++
difference() {
cube(50,center=true);
translate([0,0,-25]) cylinder(h=50,r=20);
rotate([90,0,0]) translate([0,0,-25]) cylinder(h=50,r=20);
rotate([0,90,0]) translate([0,0,-25]) cylinder(h=50,r=20);
}
```
[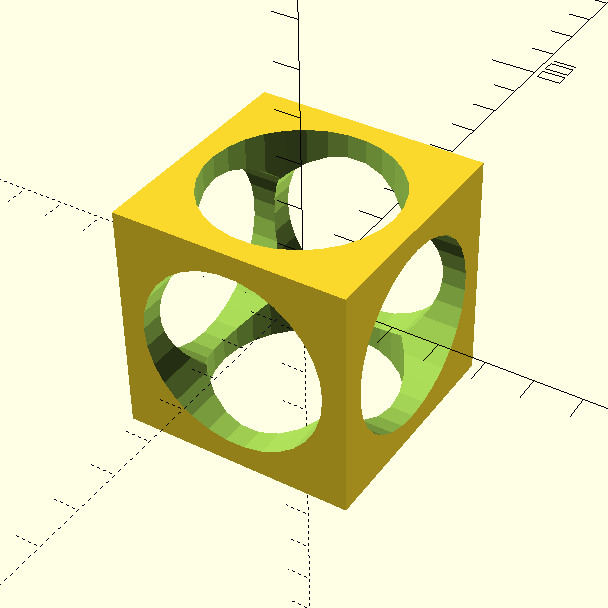](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2023-02/cylindrical-cube.png)
Nous avons ensuite pu voir un peu plus en détails comment faire fonctionner les différentes machines du FABLAB.
Pour les imprimantes 3D, le logiciel utilisé est **IdeaMaker**. Il est toujours important de réfléchir au remplissage d'un objet lors de son impression. Il faut aussi penser à l'épaisseur du fil utilisé (+ c'est fin + c'est précis mais + c'est long), à l'orientation de l'objet sur le support.