# LU2ME112 Romarin - Conception d'un robot pour l'observation sous-marine
Le projet RoMarin est un module d’enseignement proposé en seconde année de Licence de Mécanique à la Faculté des Sciences et Ingénierie de Sorbonne Université.
Chaque année, jusqu’à 16 équipes de 2 étudiants, doivent concevoir, en partant de zéro, un drone sous-marin équipé de capteurs pour l’exploration de fond marins.
Ce module d’apprentissage par projet a été crée par Didier Lucor en 2008 en s’inspirant librement du projet SeaPearch du MIT.
Dans le cadre de la deuxième phase du projet, les étudiants sont amenés à faire évoluer l’équipement de leur robot afin de réaliser un objectif technique. Pour cela les étudiants peuvent laisser libre cours à leur imagination au moyen de logicels de conception assistée par ordinateur et fabriquer leurs propres mécanismes en utilisant des techniques d’impression 3D ou de découpe laser, ainsi que des environnements électroniques open-sources pour la robotique, tels que les plateformes Arduino, Raspberry Pi ou Beaglebone.
C’est ainsi que plus d’une soixante de réalisations ont pu voir le jour depuis 2017, telles que l’équipement d’un RoMarin d’un sonar (Sondeur sur Seine), la construction d’un planeur autonome (Glider), ou l’élaboration RoMarin wifi (RoMarin du futur). Certaines de ces réalisations ont fait l’objet d’expérimentations en mer à l’Observatoire Océanologique de Banyuls en juin 2018 et 2019.
# Nouvelle page
# Projet SonaROV : un robot sous-marin autonome
# **Présentation du projet**
#### **Informations**
- **Michal Drozd | Victor Rashed-Mohassel | Léo Élies**
- ** | | leo.elies@etu.sorbonne-universite.fr**
- **L2 Mécanique Mono-Intensif | L2 CMI Mécanique | L2 Mécanique Mono-Intensif**
- **01/03/2024 - 03/05/2024**
#### **Contexte**
**L'UE Romarin est un projet de L2 qui consiste à concevoir un ROV (ou *Remotely Operated Vehicle*). Dans une première partie du projet, la structure du robot a été construite, ainsi que l'installation de toute la partie électronique a été effectuée (moteurs, capteurs de pression, température et luminosité, construction d'une télécommande). Dans un second temps, nous nous sommes penchés sur l'amélioration de ce premier robot sous-marin. Le but du projet était alors d'acquérir une donnée envoyée par des capteurs, de la traiter pour pouvoir piloter les moteurs. Le robot pourrait détecter un objet dans l'eau et se diriger vers lui automatiquement sans l'intervention d'un opérateur. Nous avons décidé de collaborer avec un autre groupe, qui s'est chargé de concevoir une pince robotique, permettant d'attraper l'objet détecté.**
**Vous trouverez plus d'informations concernant le projet sur le site suivant : [https://romarinsu.wordpress.com/](https://romarinsu.wordpress.com/)**
#### **Objectifs**
- **Concevoir un système de détection d'objet**
- **L'assembler sur le robot (CAO)**
- **Réaliser l'asservissement du robot**
# **Étapes**
#### **1. Système de détection d'objets**
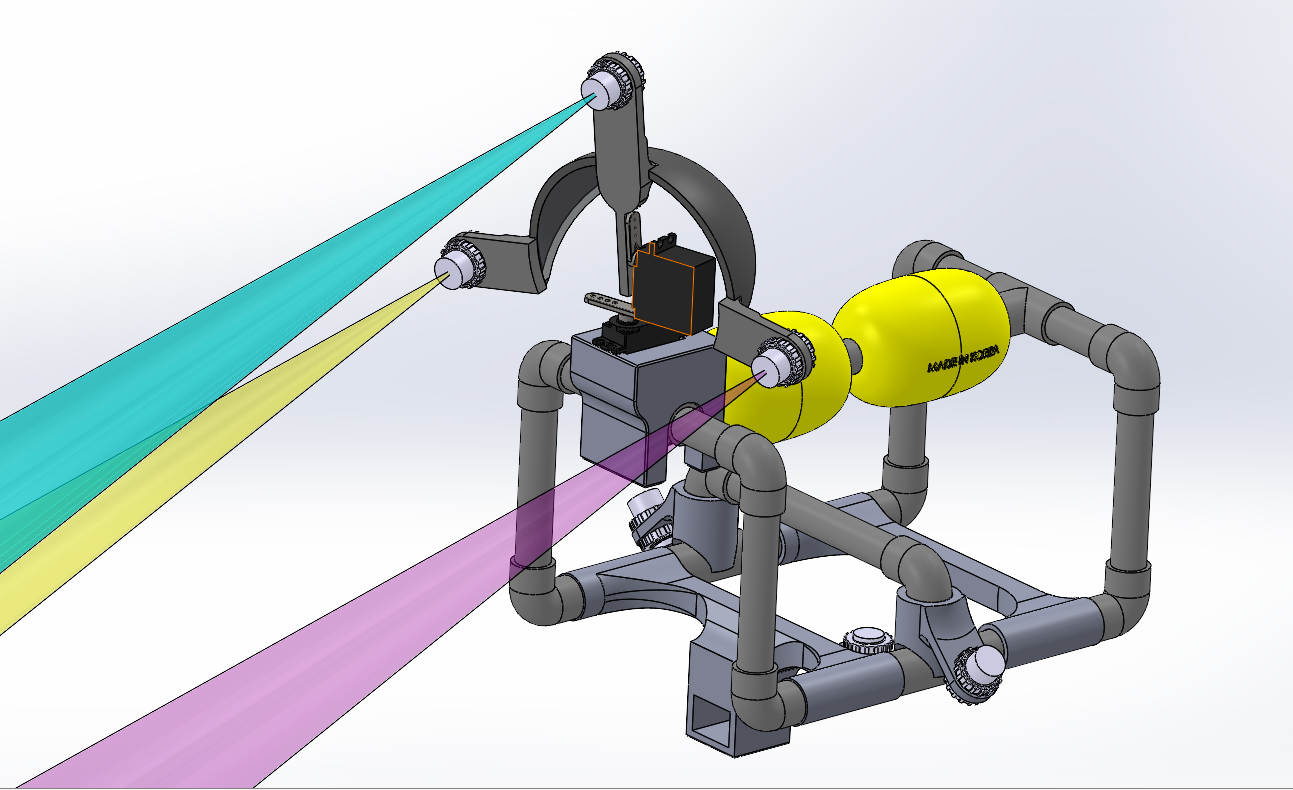
**Nous avons décidé d'utiliser des capteurs à ultrasons fonctionnant dans l'eau. À l'aide de deux servomoteurs nous avons construit un système qui balaie l'espace (de gauche à droite et de haut en bas). De cette manière, pour chaque point de l'espace nous obtenons une distance. Il est donc possible de reconstruire une pièce en 3 dimensions par exemple. Nous avons utilisé 3 capteurs afin d'améliorer la précision. Cette étape consistait à concevoir ce système sur le logiciel Solidworks.**
**Les capteurs latéraux font office de système anti-collision. Si une paroi, risquant de rentrer en collision avec le ROV est détectée, les moteurs sont coupés.**
**[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-05/eFximage.png)**
#### **2. Impression des pièces sur imprimante 3D**
**[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-04/20240404-191615.jpg)**
**[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-05/22cc1812-7998-4984-9ba0-22d015e53258.jpeg)**
#### **3. Réalisation de l'asservissement du robot**
**Le code a été réalisé en *Arduino.* Nous avons utilisé une carte Arduino UNO.**
# **Journal de bord**
##### **02/04/2024**
Impression du support triangulaire qui sert à la disposition des 3 capteurs.
Imprimante 3D : Raise 3D Pro 2 Plus
Matériau : PLA Noir
##### **13/05/2024**
Impression de la pièce permettant la liaison avec la pince robotique d’un autre groupe.
Imprimante 3D : Raise 3D Pro 2
Matériau : PLA Noir
##### **16/05/2024**
Modification du support triangulaire qui sert à la disposition des 3 capteurs et réimpression. L'ancien s'est cassé.
Imprimante 3D : Raise 3D Pro 2
Matériau : PLA Noir
## **Rapport détaillé**
**[https://romarinsu.wordpress.com/sonarov-2024/](https://romarinsu.wordpress.com/sonarov-2024/)**
# Projet legorov
Impression de piece de support en 3d nécéssaire à la réalisation d'une transmission par couplement magnétique