Faire une preuve de concept ou une maquette d’un projet que vous définirez vous-mêmes (choix du projet et thème: libres). Vous documenterez l'ensemble du processus
Inclure au moins deux technologies vues en atelier : conception et impression 3D / conception 2D et découpe laser / électronique numérique
Deux approches possibles : concevoir un objet qui ressemble à l’objet final (éventuellement à l'échelle) ou bien un système électronique qui simule le comportement de l’objet final (mais ça peut être les deux à la fois)
### Attendus de la documentation Les éléments suivants doivent apparaître dans la documentation de votre projet : - définition du projet (besoin, utilisateurs, fonctionnalité principale, fonctionnalités secondaires) - réflexions sur la problématique et veille sur l'existant - lean canvas - choix techniques - gestion de projet: "minimum viable product", planification et répartition des taches - croquis, dimensions - liste du matériel - fichiers de conception et étapes de création des fichiers (captures d'écran) / code - photos et analyse des tests, essais, erreurs - photos des étapes de réalisation du prototype, paramètres des machines - photos de l'objet final - réflexions de pistes d'amélioration ou d'évolution du projet - sources des tutoriels, inspirations, ressources utilisées (à insérer au fil de la documentation) Les projets de l'année précédente : [https://wiki.fablab.sorbonne-universite.fr/BookStack/books/projets-due-2022-2023/chapter/mu5mn045-projets-prototypage](https://wiki.fablab.sorbonne-universite.fr/BookStack/books/projets-due-2022-2023/chapter/mu5mn045-projets-prototypage) # New Page # Projet final : Essuie-glace pour lunette - Flora Anaelle Chanel Manele **Problématique :** Buée sur les lunettes en temps humide. **Solution :** Essuies-glaces qui se déclenchent automatiquement lorsque de la buée apparaît sur les lunettes. **Marché :** - Lunettes avec essuies-glaces intégrés - Lunettes anti-buée - Essuies-lunettes # Anaelle - Manele - Chanel Humidificator Nous avons créé un humidificateur qui s'active avec un bouton. Matériel utilisé : - 1 capteur : Grove - Water Automization - 1 ampoule (avec sa résistance) - 1 Arduino - 1 Shield - 1 bouton (avec sa résistance) - 4 fils conducteurs Difficultés rencontrées : - Difficulté à identifier l'état du capteur lorsque l'on appuyait sur le bouton - Solution = nous avons installé une LED qui s'allume lorsque le capteur est activé - Non compréhension du code au niveau de l'activation du LED : - Pour activer la LED lorsque le capteur s'active, on a d'abord noté **digitalWrite(led,HIGH)**, mais finalement il ne fonctionne que s'il est marqué **digitalWrite(led,LOW)** - Problème toujours pas compris Code : [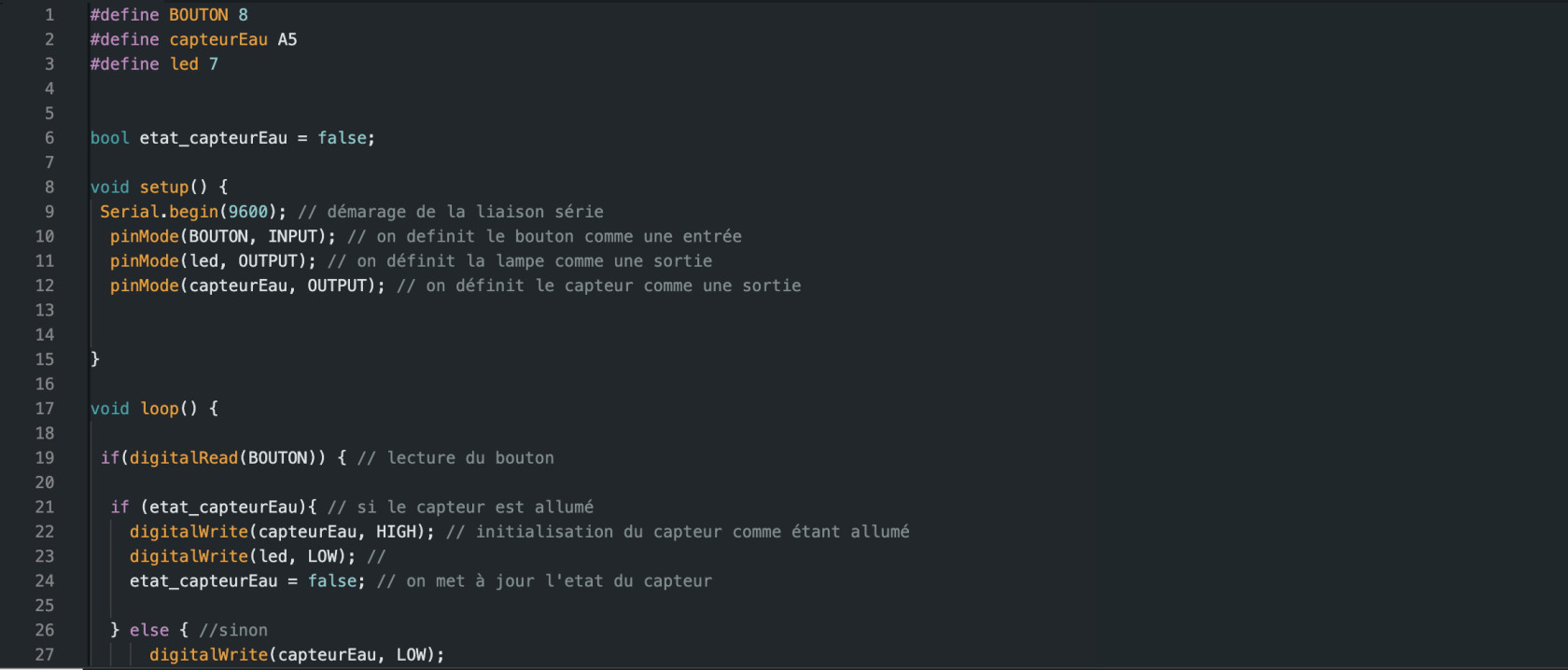](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-02/code-arduino-1.jpg) [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-02/code-arduino-2.jpg) Description du montage : - Nous branchons le Shield sur l'Arduino - Nous avons branché le capteur sur I2C - Nous connectons le bouton et sa résistance au port 5V, au GND et au port 8 - Nous connectons la LED et sa résistance au port 5V, au GND et au port 7 - Nous déposons le capteur sur une surface d'eau - Nous appuyons sur le bouton pour activer le système, le LED s'allume si le système est bien en marche Photos/video du montage Vidéo en pièce jointe ! [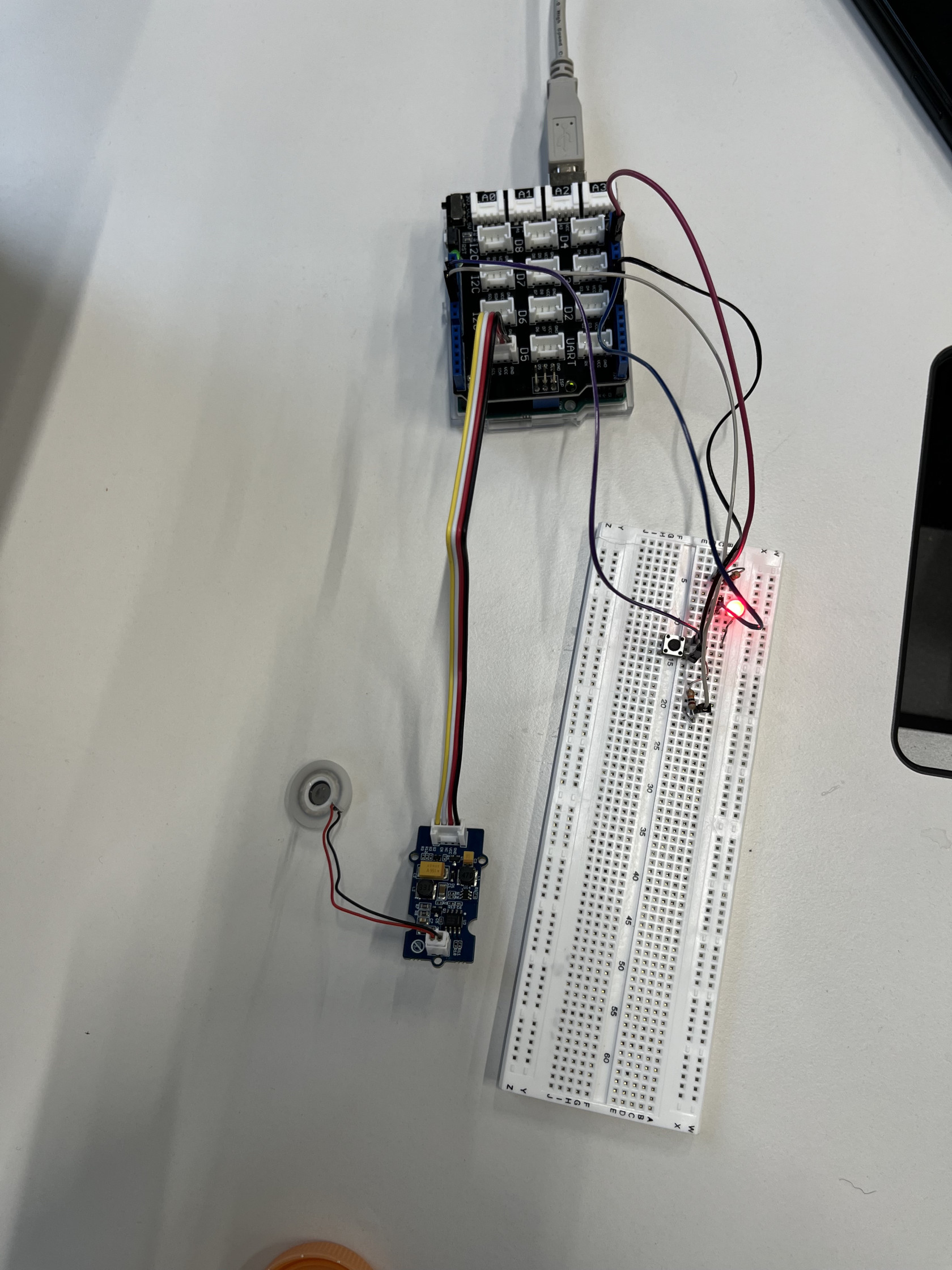](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-02/montage-arduino.jpg) # Billore Flora/ Ruffie Marine/ Meunier Jade **Détecteur de Son avec LED** Objectif : L'objectif de ce projet était de concevoir un système de détection de son à l'aide d'un capteur de son connecté à une carte Arduino, et d'utiliser des LED pour indiquer visuellement la présence ou l'absence de son. Plus précisément, nous voulions que la LED jaune reste allumée tant qu'un son était détecté, tandis que la LED rouge s'allumait lorsque aucun son n'était détecté. Matériel utilisé : Pour ce projet, nous avons utilisé les composants suivants : \- Une carte Arduino Uno \- Un capteur de son (microphone) \- Deux LED (une jaune et une verte) \- Des résistances pour limiter le courant traversant les LED \- Des fils de connexion pour connecter les composants entre eux Déroulement : Nous avons commencé par connecter le capteur de son à l'Arduino et à écrire un code de base pour détecter les variations du niveau sonore. Ensuite, nous avons ajouté les LED et écrit le code pour les contrôler en fonction de la détection du son. Une des principales difficultés rencontrées a été de calibrer le seuil de détection du son afin d'éviter les fausses détections. Nous avons dû ajuster ce seuil plusieurs fois pour obtenir un comportement fiable du système. Une autre difficulté était de gérer le fonctionnement des LED en fonction de l'état du capteur de son. Nous avons dû prendre en compte les différents scénarios possibles, notamment lorsque le son était présent en continu et lorsque le son était intermittent.| **Nom du dispositif** | **Description** | **Illustration** |
| **Systèmes d'irrigation goutte-à-goutte** | Ces systèmes, qui délivrent l'eau directement au niveau des racines via de petits tuyaux, sont très efficaces pour économiser l'eau. Ils peuvent être adaptés pour des installations intérieures ou extérieures. Toutefois, leur mise en place peut être complexe et laborieuse, nécessitant souvent des installations invasives comme le perçage ou le creusage | [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-04/MHNimage.png) |
| **Systèmes de mèches** | Utilisant des mèches absorbantes qui transfèrent l'eau d'un réservoir au sol à mesure que celui-ci s'assèche, ces systèmes sont simples à installer et à utiliser. Ils sont particulièrement adaptés pour arroser plusieurs plantes situées à proximité les unes des autres et pourraient être idéals pour un arrosage constant sans maintenance fréquente | [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-04/4vRimage.png) |
| **Pots auto-arrosants** | Dotés d'un réservoir d'eau sous le sol, ces pots utilisent la capillarité pour monter l'eau vers les racines des plantes lorsque nécessaire. Ils sont faciles à utiliser et nécessitent peu d'entretien, bien qu'ils puissent être onéreux et demandent un remplissage régulier du réservoir, surtout pour les grandes plantes ou dans des conditions climatiques chaudes | [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-04/d0Fimage.png) |
| **Matériaux d'absorption par capillarité** | Certains systèmes emploient des matériaux ou tissus qui s'imprègnent d'eau d'un réservoir et l'acheminent vers le sol du pot de la plante. Faciles à installer, ils fournissent une hydratation uniforme et continue, ce qui aide à prévenir le sur ou le sous-arrosage. Cependant, ils ne conviennent pas à toutes les espèces de plantes, surtout celles qui préfèrent un sol moins humide | [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-04/gpximage.png) |
| Date | Tâches |
|---|---|
| 02/04 | Réunion d'équipe |
| 02/04 | Vérification des matériaux pour le MVP |
| 02/04 | Conception du prototype initial du produit sous la forme de schéma |
| 03/04 | Développement du circuit électronique |
| 03/04 | Impression 3D du prototype de vase |
| 29/05 | Assemblage final des composants du vase |
| 29/05 | Test du système d'arrosage et de filtration |
| 30/05 | Finalisation et révision du MVP |
| 30/05 | Collecte des retours et des commentaires |