| [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-05/ngvscreenshot-2024-05-22-224013.png) | [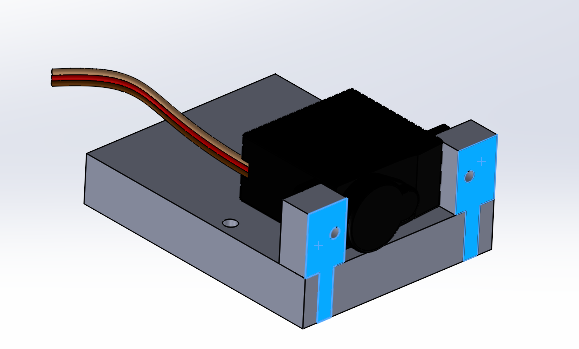](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-05/screenshot-2024-05-23-003150.png) |
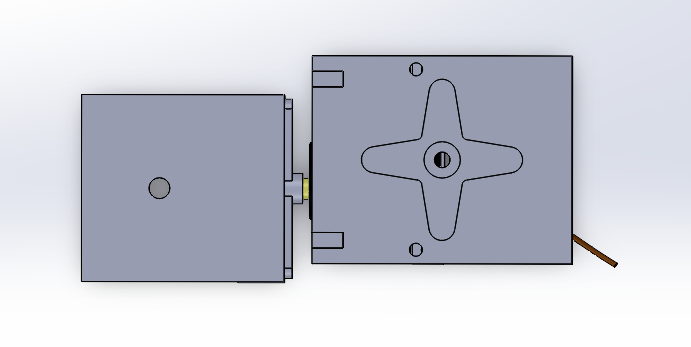
| **Figure 14 : Support servomoteur face du dessous** | **Figure 15 : "Freins" (en bleu)** |
| [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-05/screenshot-2024-05-23-002741.png) | [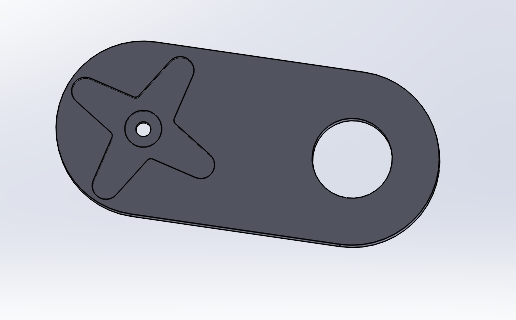](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2024-05/screenshot-2024-05-23-002809.png) |
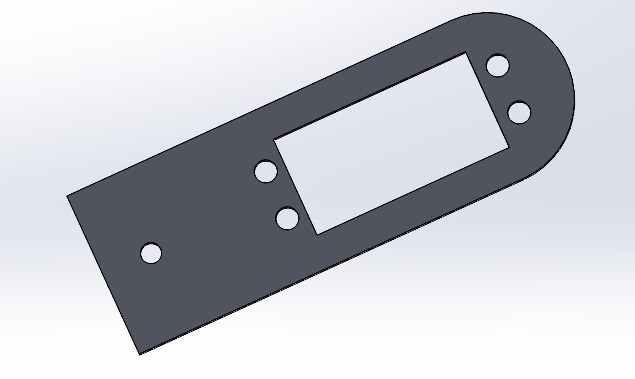
| **Figure 16 : Bras long** | **Figure 17 : Bras en extrémité** |