PROJET ROB3 (Mattéo, Mathis, Manu, Victor, Maxence, Athar, Maxime) .
Schwarzy
Répartition des rôles :
- Responsable informatique : Maxence
-
Pôles informatique : Maxence, Manu, Mathis
-
Responsable électronique: Mattéo
- Pôle électronique : Matthéo, Victor
-
Responsable mécanique : Maxime
- Pôle mécanique : Maxime, Athar
-
Chef de projet : Victor
- Responsable batterie :Athar
- Responsable moteur : Matthéo
- Responsable Planning : Mathis
Pôles informatique :
- Stratégies pour réaliser l'objectif : (position des capteurs pour localiser les différents obstacles/objets)
- Test du capteur ultrason avec la carte arduino
- Modification du programme arduino pour avoir une meilleur précision de la distance
- Test des moteurs CC (un puis deux)
- Test du servomoteur

Pôle électronique :
- Determination du câblage pour les moteurs
Les moteurs ont besoin d'être alimenté en 12V DC de plus ils communiquent via le bus CAN(les bornes H et L sur le shield ). Les trois moteurs sont branchés en série, ils s’alimentent mutuellement grâce aux 2 ports V+ et V- sur chaque moteur (comme montré sur le schéma du câblage). La carte arduino peut-être alimentée directement en 12V via la prise jack
- Determination du câblage des capteurs et actionneurs : les pins des capteurs et de la pince ont été définis comme tel:
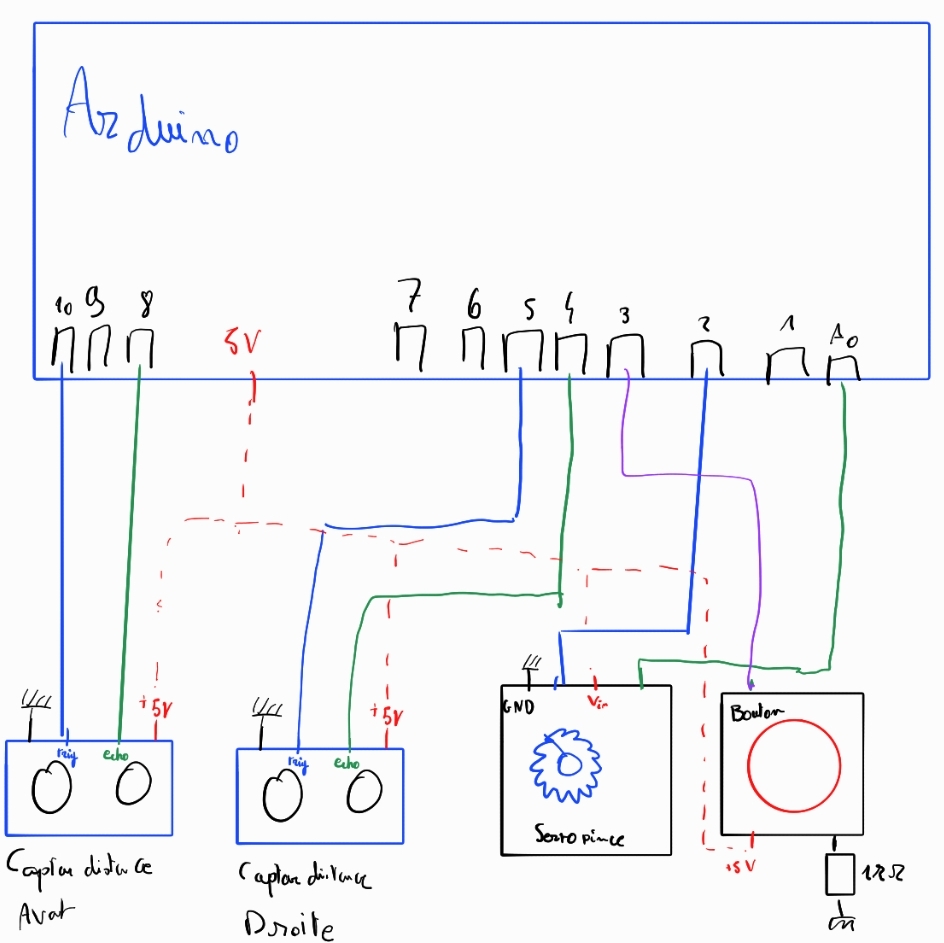
Le plus compliqué a été de gérer le 5V commun. Pour se faire nous avons utilisé des wago personels.
Des soudures on été faites pour relier certains câbles et les agrandir. Nous avons envisagé d’utiliser une labdec pour simplifier les branchements, mais nous n’avions pas assez de place.
Pôle mécanique :
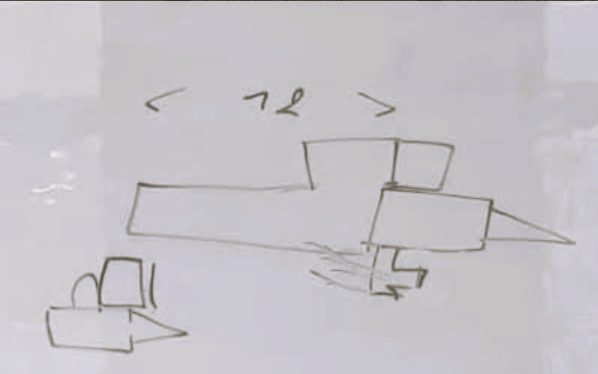
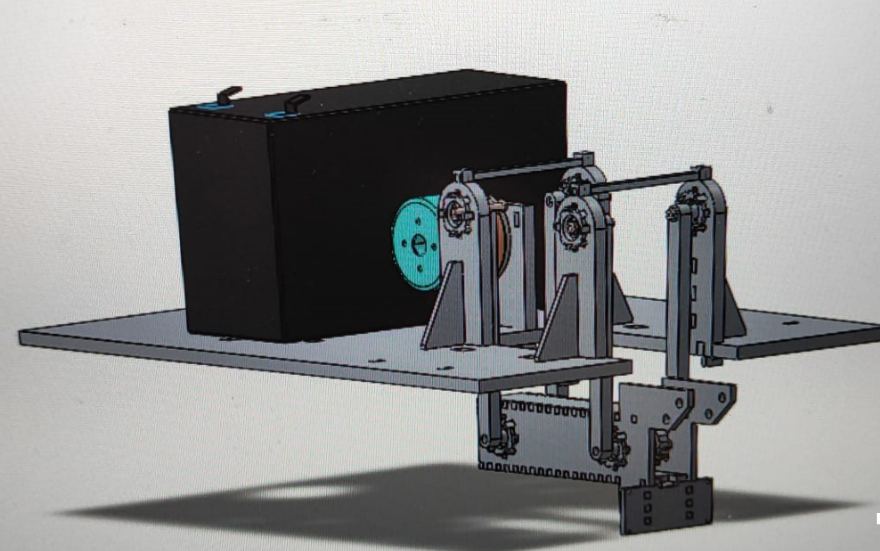
- Imagination du Robot :
Tout d'abord il faut prendre en compte le cahier des charges et concevoir plusieurs schémas de robots et choisir une des propositions.

On a choisi de nous inspirer d'un bélier (l'arme de siège) pour concevoir le robot.
- Conception de la pince :
Ensuite on conçoit la pièce centrale du Robot. On a imaginé une pièce cubique facilitant le passage des fils et renforçant la structure. Cette pièce est équipée de la pince plastique et d'un capteur.
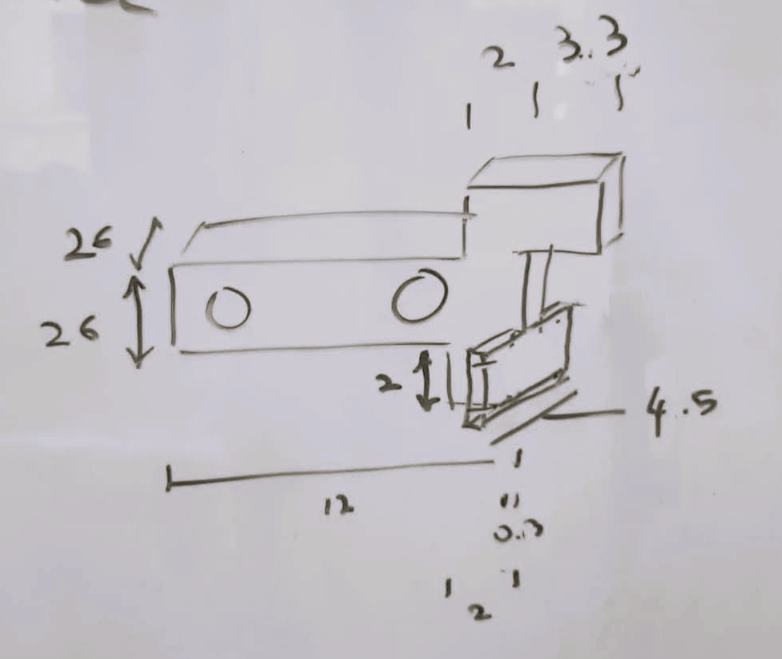
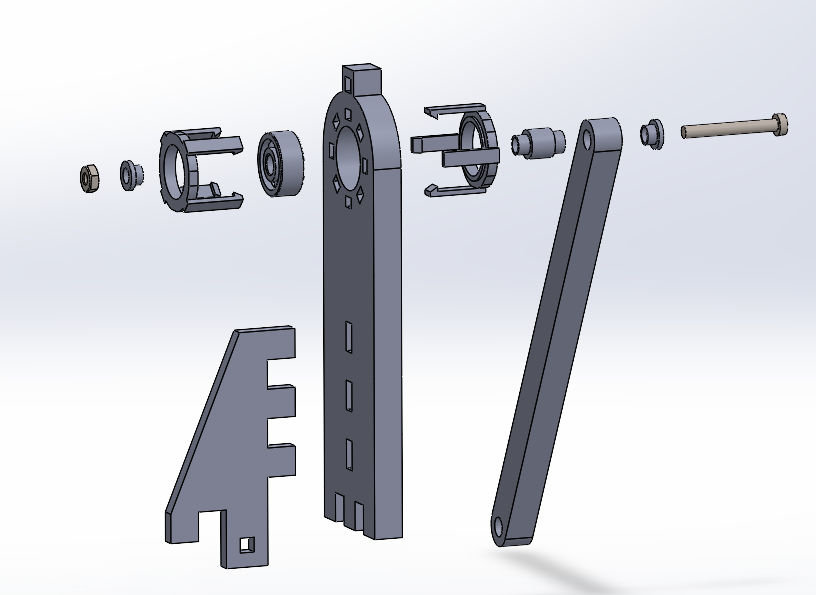
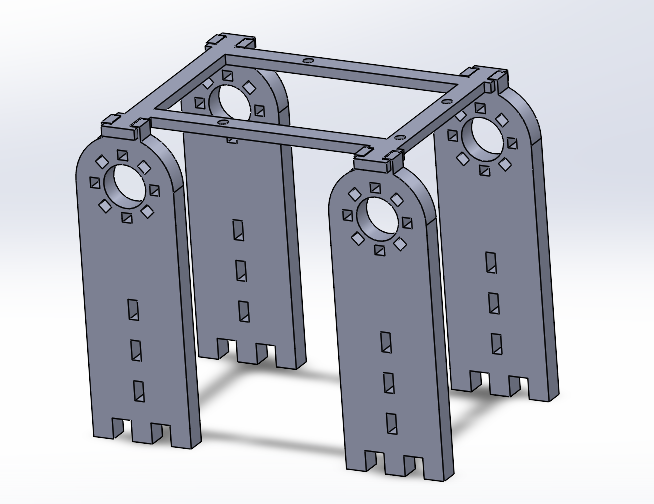
- Conception des bras et pilier :
On a conçu le système avec roulements qui connecte le bras et une autre pièce, ce système est le même au deux extrémités de celui-ci (la pince et le pilier).
On a conçu 4 piliers leur bras pour que la pince est un mouvement stable.
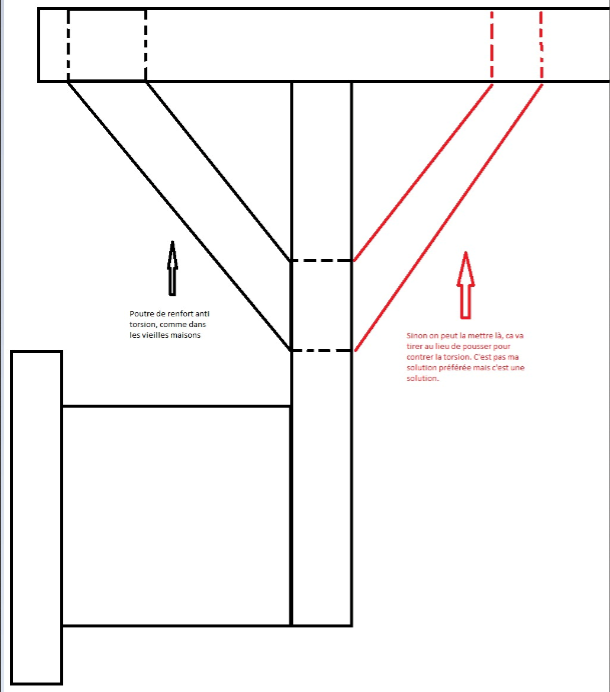
On a rajouté des renforts en haut et en bas des piliers.
- Ajout des Roues :
On a d'abord ajouté les roues avec leur moteur à l'avant au milieu des piliers puis on a rajouté la roue folle à l'arrière. Il a fallu faire attention à la différence de hauteur entre les différentes roues pour que le plateau reste parallèle au sol et au passage des fils.
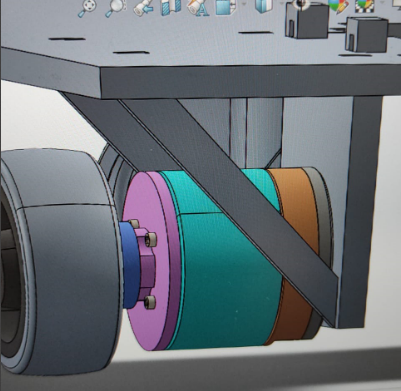
Notre première idée de renfort ne marchait pas car la partie cyan tourne, Il y aurait trop de frottement.

Donc nous avons imaginé un système de renfort plus classique

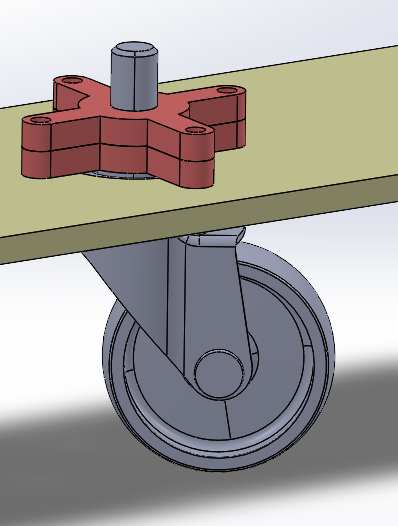
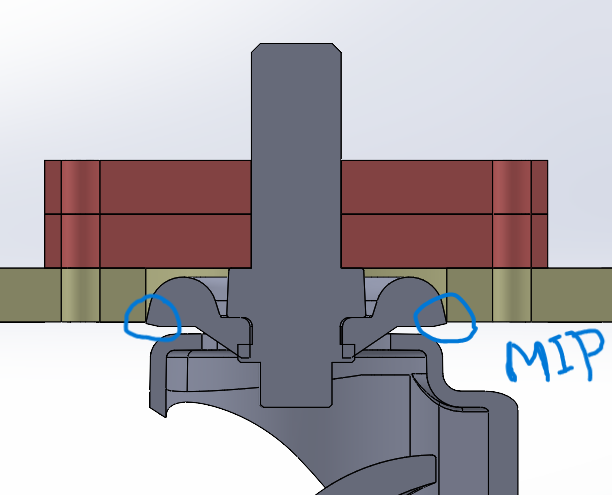
Pour la roue folle on a choisi de faire la MIP
- Ajout du moteur pour le bras :
On a choisi de déporter le moteur, on ne l'a pas mis à la place d'un pilier. On a utilisé un système d'engrenage et le même système de support que celui des roues.

- Ajout de la batterie et de la carte Arduino :
- Optimisations :
Rajout de barres entre les roulements pour rajouter de la stabilité, transformant les deux liaisons rotule en une pivot.
Séances :
Séance 1 :13/02/2025
- Répartitions des rôles
- Découverte des différents pièces + multiples tests
- Commencement du Planning
Séance 2 : matinée 06/03 :
Diagramme de Gantt
Modélisation Solidworks Pratiquement terminée
AF : motoriser moteur et pince (capteur US déjà fait)
Info
Ils ont une idée de l’algorithme qui devra être implémenté. Ils doivent commencer à le coder pour le tester.
Faire marcher les moteurs et la pince en fournissant les codes arduinos à l’équipe électronique.
Ils veulent tester le capteur pour évaluer sa précision et voir si on peut effectivement l’utiliser de la façon prévue dans l’algorithme qu’ils ont préparé.
Ils ont besoin de le tester leur code en situation réelle.
Ils ont changé de code arduino pour faire marcher le capteur. La nouvelle version est plus précise car elle traite la distance en mm, au lieu de la traiter en cm auparavant.
Modélisation / Méca
Ils ont modélisé les différentes pièces du robot : le châssis, le bras ainsi que son système d’activation avec l’un des 3 moteurs et un engrenage. [rajouter d’autres pièces éventuellement]
Procédé choisit pour la conception des pièces du robot (hors moteurs, pince, capteurs et roues) : découpage laser de pièces de bois aggloméré.
Modèle pour le recul du robot en fonction de l’angle du bras : comme le bras à une trajectoire circulaire, sa position change lorsque l’on l’actionne. On fait donc avancer ou reculer le robot lors du mouvement du bras pour qu’il reste à la même position. Besoin de déterminer une relation entre l’angle de levée du bras et du recul du robot pour compenser.
Prise en main de la découpe laser, essai pour déterminer les incertitudes de la découpe, et définir le "serrage" voulu pour les pièces. Impression des premières pièces du modèle ensuite.
Question : le guidage du mouvement est-t-il fonctionnel ? Le fait d’avoir 4 liaisons / guidages pour une seule transmission de mouvement via l’engrenage est efficace ?
Électronique :
Faire fonctionner les moteurs, la pince.
Moteur : on a lu la documentation du branchement. On a réussi à le faire tourner. On adapte le code pour faire fonctionner 3 moteurs en série ensemble. Code TP de Maurel
Bouton (interrupteur) : branchement trouvé et effectué par Matis (doc arduino)
Pince : Manu, doc et branchement Arduino
Séance 3 en autonomie, 13 mars (aprem) :
Mécanique
Imprécisions finies, commencer à imprimer les pièces, calculer rotation des roues et déplacement (Atthar et Maxime)
Informatique & Électronique
Mattéo : faire fonctionner les moteurs en série
Manu : faire fonctionner la pince. Implémenter un code qui permet de contrôler la pince en fonction d’une distance voulue en cm, et pas par rapport à un angle.
Scéance 4 20/04
Scéance 5 : 15/05/2025
Pôles informatique :
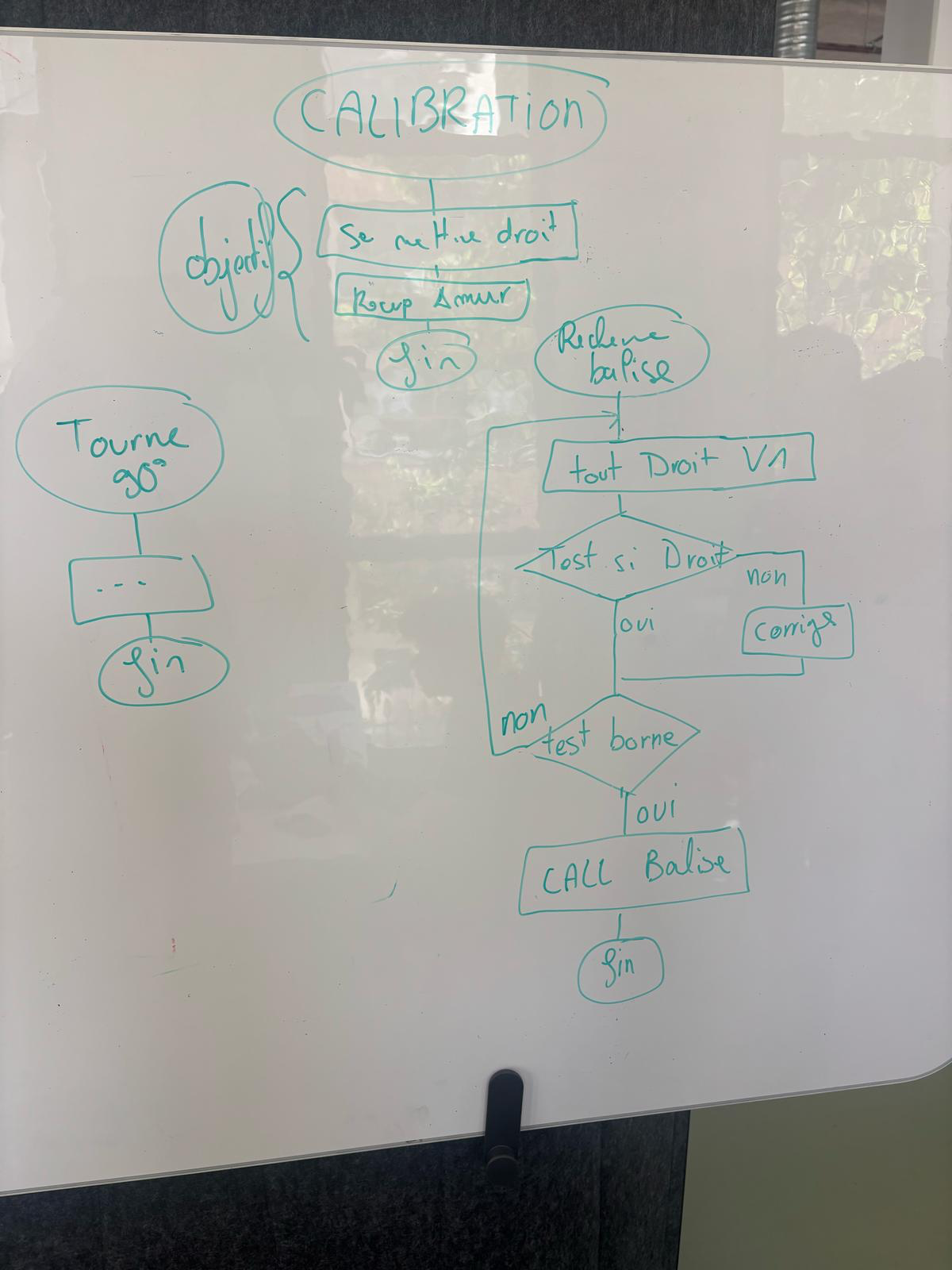
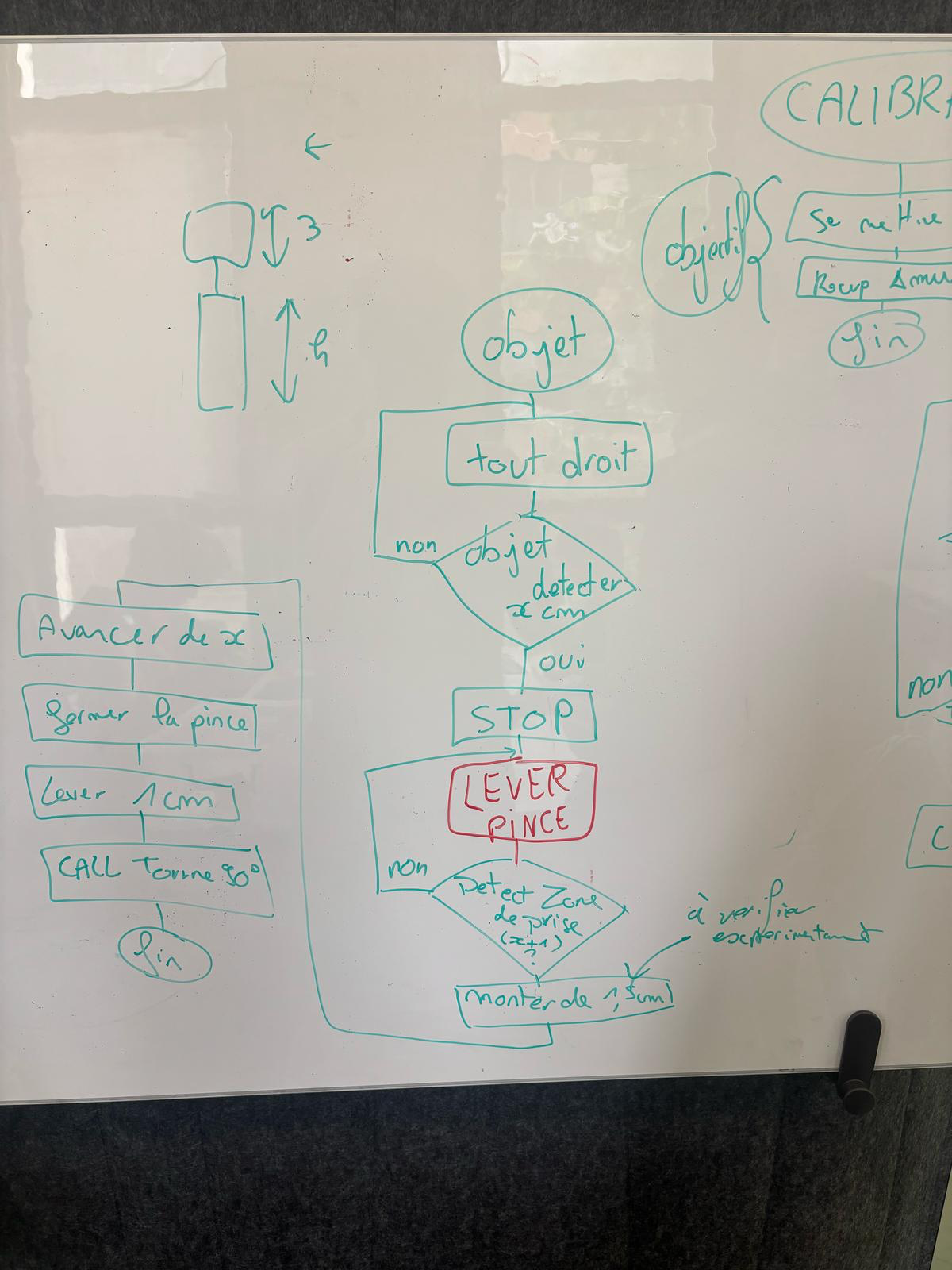
- Organigramme du programme principal
- Organigramme des sous programme
- Répartition des fonctions à réaliser:
- Tourner à 90° // Mathis
- Ouverture et fermeture de la pince // Fait par Manu
- Recherche Balise // Maxence
- Odometrie // Mathis
- Calibration // Manu
- Objet // Maxence
- Compensation mouvement bras // Mathis

 0
0
Pôle électronique :
- Debridage des moteurs + ajout de vel max
- Relier tous les câbles des servo moteurs + les deux capteurs aux VCC et GND
- Relier les câbles de data au pins que voulais le pôle informatique
Pôle mécanique :
Constat d’une erreur avec la conception de la pièce support du capteur (problème de côté avec les vis). Autre problème avec hauteur du capteur -> changement de fonctionnement dans le code pour la détection du haut du totem. On commence la "recherche" de la poignée du totem en partant du bas (au lieux de partir du haut).
Activité 22/05/2025
Pôle informatique :
- Test de fonctionnement des trois moteurs ( le robot peut avancer et lever son bras )
- Recherche de la valeur du couple nécessaire au moteur pour lever le bras tout en haut
- Continuation des fonctions odometrie, tourner à 90°, avancer, ect.. pour les modifier suite à leur non fonctionnement
Pôle électronique :
- mise en place des branchements
Pôle mécanique :
- essais d’améliorer le lever de bras avec un élastique pour soulager le moteur, puis finalement le moteur a un couple suffisamment pour maintenir le bras lever
Activité 04/06/2025
Pôle informatique :
- mise en commun des différents code réalisés par chacun des membres du pôle informatique
- test des fonctions
- après plusieurs essais, et de mesure, amélioration de la fonction pour avance
- fonction odometrie n’a pas l’air de fonctionner correctement et elle est utilisée pour tourner à 90° donc création d’une fonction plus expérimentale ou on va faire tourner le robot à une certaine vitesse pendant un certain temps pour obtenir 90°.
- test de la fonction qui permet de lire
Pôle électronique :
- amélioration des branchements wago
- mise en place du bouton sur le robot
- recharge de la batterie ainsi que test du fonctionnement avec uniquement la batterie
Pôle mécanique :
- amélioration et conception de nouvelles pièces pour un meilleur maintien de la batterie
Activité 05/06/2025 : Passage
Pôle informatique :
Debogage
Pôle électronique :
Ressoudage de cable débranché/ cassé
No Comments