Projet "STRIDER"
Informations
- DOUAOUI Adam, ANNETTE Philippe, CELLIER Maximilien, BEAUBIJAT Alexandre
- adam.douaoui@etu.sorbonne-universite.fr
- L2 Mono-mécanique intensif/classique
- 29 novembre 2024 - en cours
Contexte
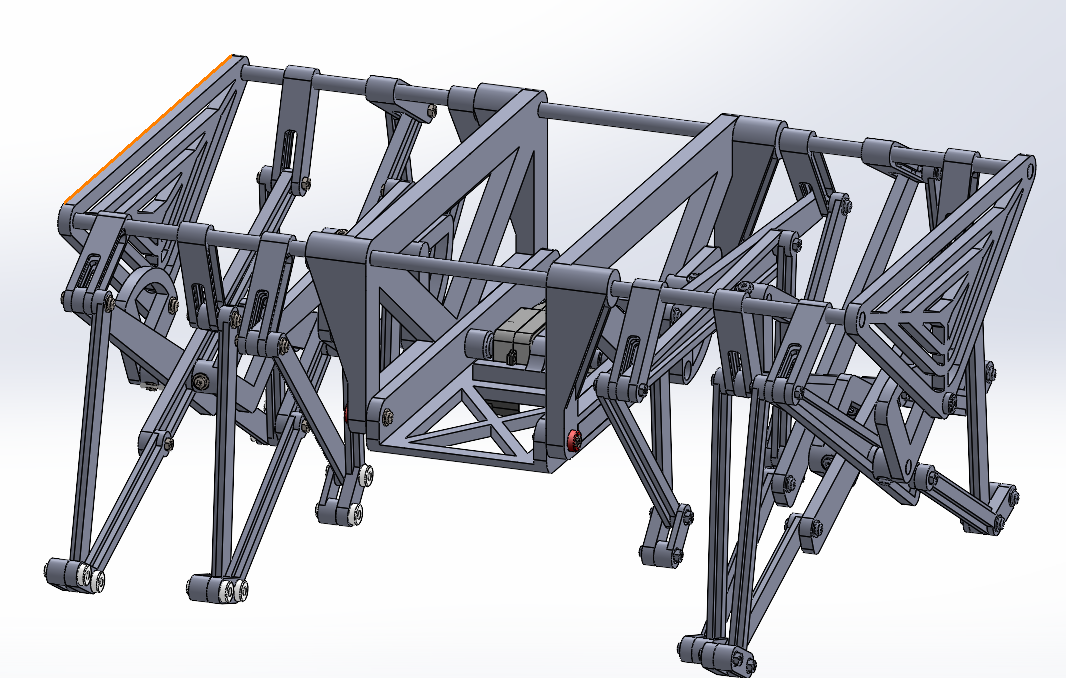
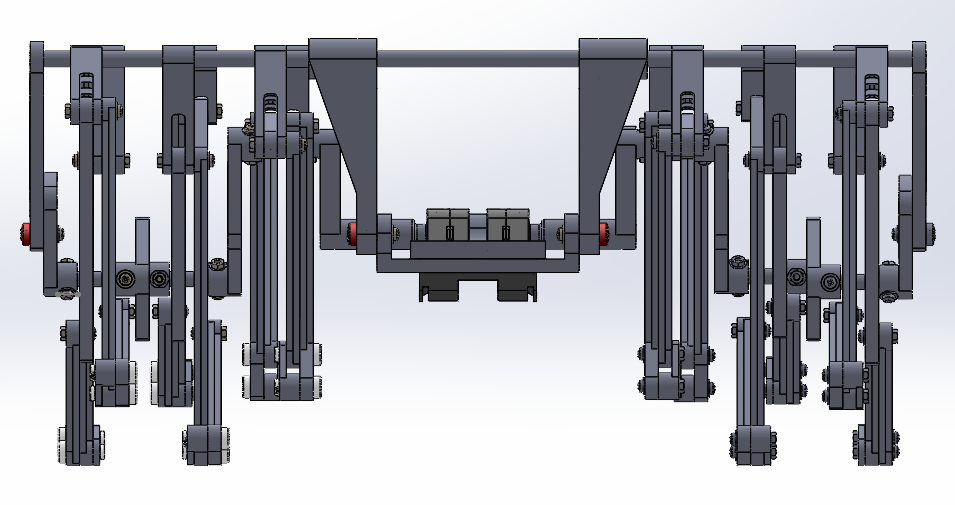
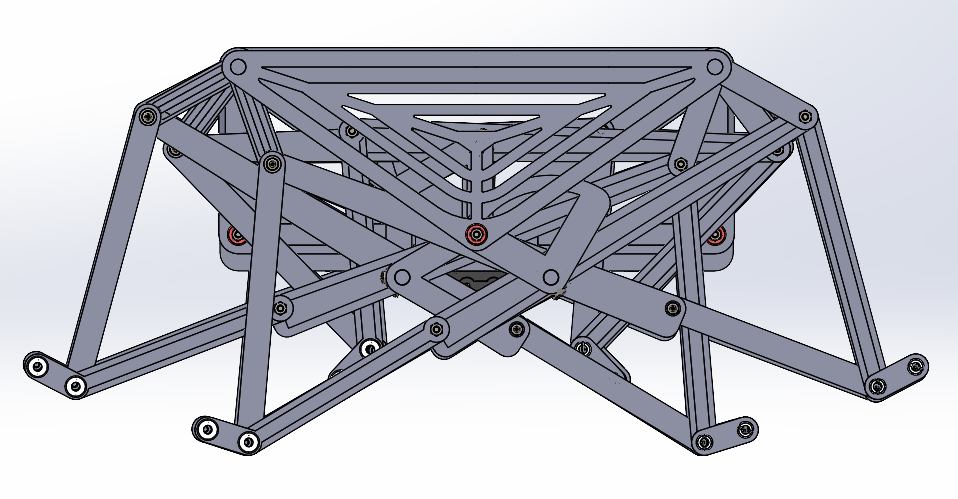
Le projet de cette UE consiste à prototyper un robot marcheur conçu et simulé sur SolidWorks. Nous avons réalisé une variante du mécanisme de Jansen. Cet hexapode est basé sur une variante du mécanisme Jansen qui a la particularité d'avoir une grande stabilité.
Objectifs
L'objectif de ce projet est de concevoir un robot marcheur et de réaliser son prototypage en assemblant les pièces conçues au Fablab. Nous avons fait le choix de fabriquer la plupart en PLA à l'exception de certaines fixations pour lesquelles on utilisera des vis.
Matériel
- PLA 1.75mm (noir, Galaxy black)
Machines utilisées
- Original Prusa MK4S
Construction
En cours
Journal de bord
Avancée du projet à chaque étape, difficultés rencontrées, modifications et adaptations (facultatif pour les petits projets)
29/11/2024
Premier jour au Fablab, nous avons réalisé un premier test qui s'est avéré concluant en imprimant une pièce d'un pied. Cette réussite nous a permis de passer directement à l'impression de l'ensemble des pièces nécessaires à la construction de deux pattes. Nous avions pris de soin de rajouter des supports et une jupe pour assurer le bon déroulement de l'impression selon les conseils des Fab managers.
02/12/2024
L'impression fut également une réussite ce qui nous a conduit à lancer l'impression de la partie horizontale châssis et des manivelles ainsi que de leurs axes.
03/12/2024
Nous avons tenté d'associer les axes et manivelles, fraichement imprimés avec succès. Cependant, les axes des dites manivelles étaient trop épais et se sont brisés au cours de la tentative d'assemblage. Nous avons alors pris la décision de réimprimer les axes avec une épaisseur moins importante et d'augmenter leur remplissage de 60% à 80% pour assurer leur solidité.
05/12/2024
Nous avons modifier les fichiers STL et ainsi pu lancer l'impression.
No Comments