Régulation du niveau d'eau dans une cuve (GROUPE I)
Membres du groupe :
- Jean EL NADDAF
- Amina ROUABHIA
- Laetitia SADMI
- Mohamed-Ali HAMZA
- Redha MELHEB
- Silya BAZIZI
Cursus : Master 2 Chimie - Parcours ingénierie chimique
Date : 15/10/2024
Contexte :
La gestion des ressources en eau est un défi majeur dans les domaines industriel, agricole et domestique. Le contrôle du niveau d'eau dans des réservoirs ou des cuves est une problématique essentielle pour garantir une utilisation optimale et éviter des problèmes tels que le débordement, la pénurie ou les dysfonctionnements des équipements associés. Dans l'industrie, des systèmes similaires sont utilisés pour gérer les fluides dans des procédés critiques, tandis qu'en agriculture, ils permettent une gestion efficace de l'irrigation. Dans les contextes domestiques, ces systèmes servent à automatiser des tâches comme le remplissage des réservoirs d'eau de pluie ou des piscines.
Avec l'évolution des technologies de mesure et de contrôle, des solutions innovantes comme les capteurs ultrasoniques et les microcontrôleurs (par exemple, Arduino) offrent des alternatives fiables, abordables et programmables pour résoudre ces problèmes. Ces dispositifs permettent une automatisation accrue tout en réduisant les coûts énergétiques et les besoins en maintenance.
Objectif :
Ce projet vise à concevoir et développer un système automatisé de régulation du niveau d’eau dans une cuve. L’objectif principal est de maintenir un niveau d’eau optimal en utilisant un capteur ultrason pour mesurer en temps réel la hauteur du liquide, une pompe pour ajuster le niveau, et une carte Arduino pour gérer les données et commander les équipements.
Les objectifs spécifiques sont les suivants :
-
Mesurer le niveau de liquide dans la cuve à l’aide d’un capteur ultrasonique.
-
Réguler le niveau d’eau en activant ou désactivant une pompe pour atteindre et maintenir un niveau défini.
-
Permettre à l’utilisateur de définir un niveau cible pour le liquide dans la cuve.
-
Implémenter un circuit de recirculation d’eau pour simuler un système fonctionnel.
-
Ajouter une LED d’alerte qui s’allume lorsque le niveau d’eau approche un seuil très haut, agissant comme une première alerte contre les débordements.
-
Afficher des messages d’état sur un écran LCD pour informer en temps réel de la situation, comme "Niveau haut" ou "Niveau bas".
-
Utiliser un orifice placé au bas de la cuve pour permettre une vidange par gravité, avec un débit proportionnel à la hauteur du liquide.
Matériel utilisé :
- Arduino UNO (+ adaptateur 12 V)
- Breadboard
- Tuyaux x2
- Câbles électriques (f-f, m-m, f-m) x45
- Fer à souder
- Pompe 12V
- Batterie 9V
- Module relais ( on/off)
- Écran LCD 16x2 I2C
- Diode électroluminescente (LED)
- Résistance 10 kΩ
- Capteur ultrason (HC-SR04)
- Condensateur
- Support (en bois et en PMMA)
- Cuves en plastiques (réservoirs et stockage) x2
- Pistolet à colle
- Perceuse
- Soudeuse
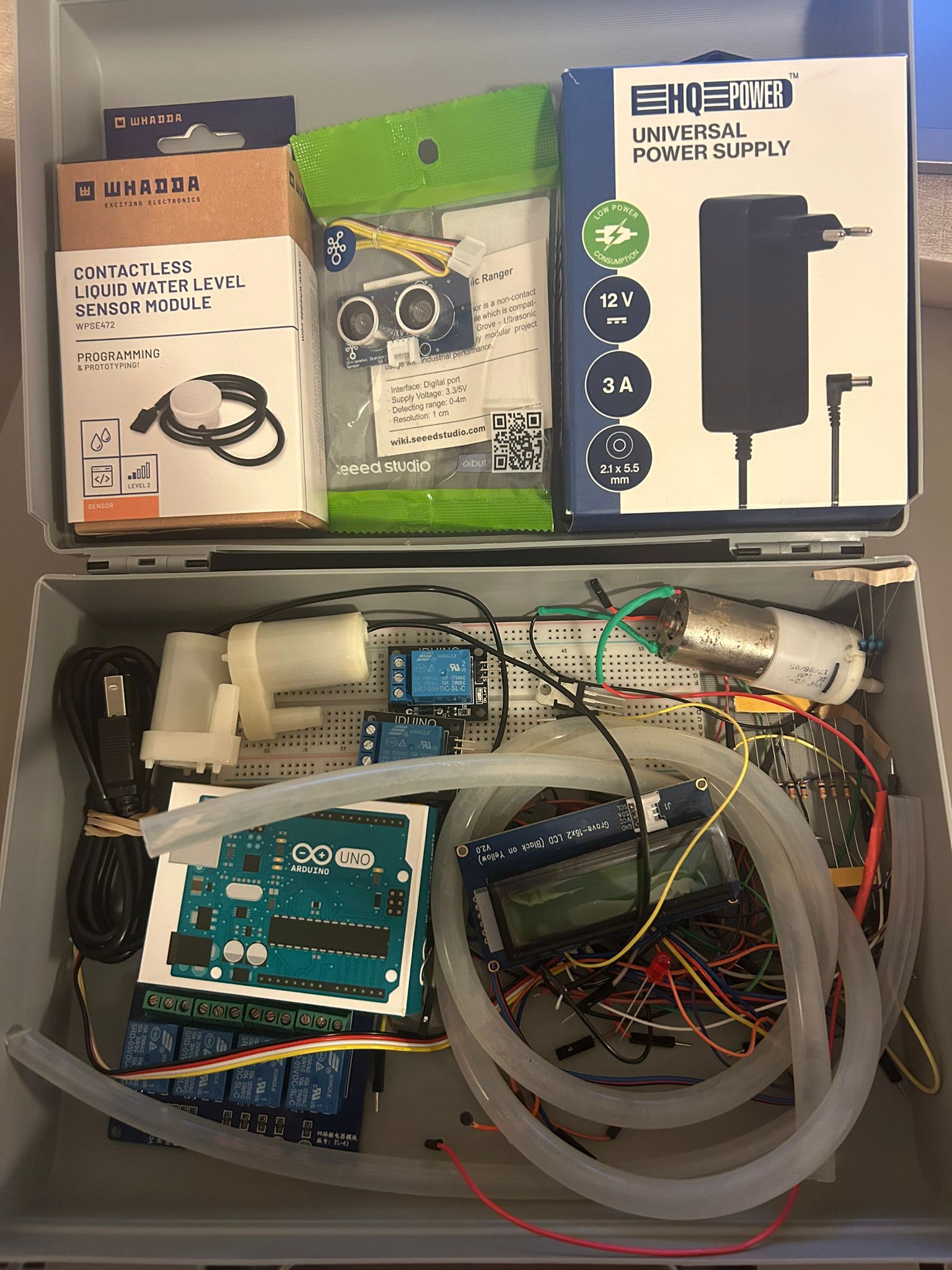
Figure 1 : Ensemble du matériel utilisé
Machines utilisées :
- Découpeuse Laser Trotec Speedy 360
- Découpeuse Laser Trotec Speedy 100
- Plieuse CRClarke
Construction
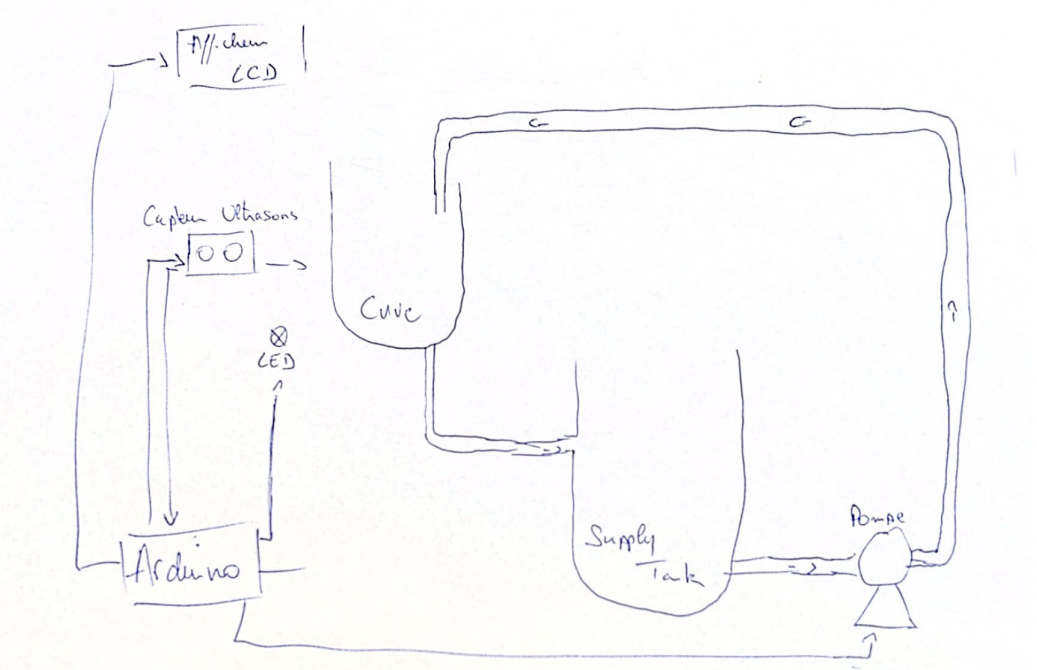
Figure 2 : Schéma structuré de départ
Dans le cadre de ce projet, plusieurs étapes sont fondamentales pour parvenir à la réalisation finale. Voici les différentes phases du processus :
Phase 1 : Mise en place du montage électronique en utilisant une carte Arduino.
Phase 2 : Recherche, adaptation et simulation d’un code Arduino sur la plateforme Tinkercad pour valider le fonctionnement.
Phase 3 : Assemblage d’un système destiné à réguler le niveau d’eau dans une cuve.
Phase 4 : Mise en œuvre finale : remplissage des réservoirs avec de l’eau dans un circuit fermé, suivi de tests approfondis pour valider le système.
Phase 5 : Démonstration finale du projet.
Journal de bord :
07/10/2024 : Attribution des projets
Intitulé du projet : Régulation du niveau d'eau dans une cuve
15/10/2024 :
-
Réunion de groupe : discussion et échange d’idées
-
Prise de contact avec la tutrice.
-
Etablissement d’un plan de travail et répartition des tâches
-
Listing du matériel nécessaire
21/10/2024 :
-
Finalisation de la liste du matériel nécessaire
-
Transmission de la liste à la tutrice
28/10/2024 :
-
Récupération du matériel
04/11/2024 :
-
Brainstorming et essai de la simulation sur Tinkercad
10/11/2024 :
- Organisation d'une réunion en visioconférence : discussion sur l'avancement du projet, prospection du matériel nécessaire et élaboration d'un plan de travail pour les prochaines étapes.
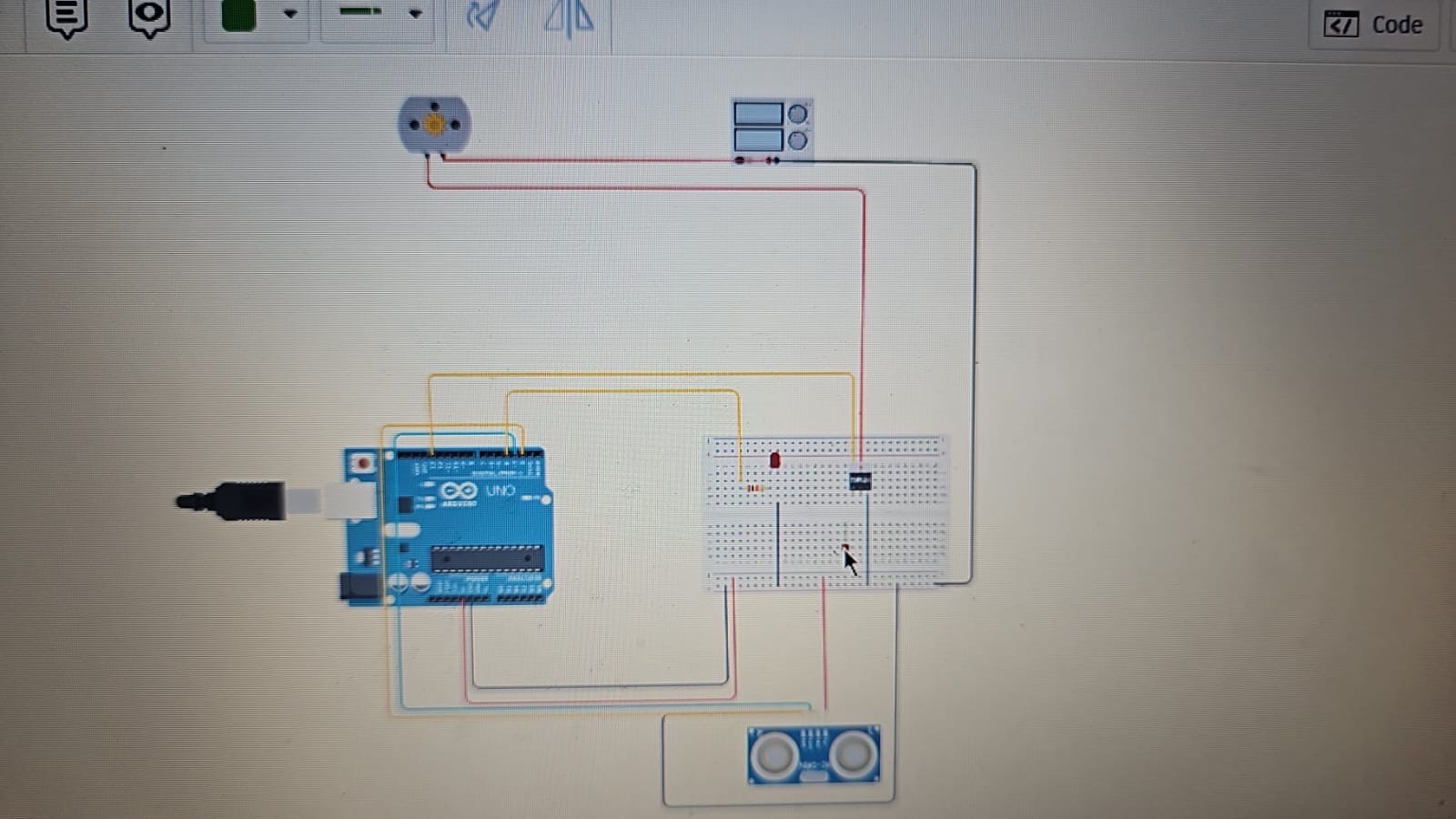
- Finalisation de la simulation sur Tinkercad : programmation et validation des branchements.
- Ajout d'une photo ou capture d'écran de la simulation réalisée sur Tinkercad.
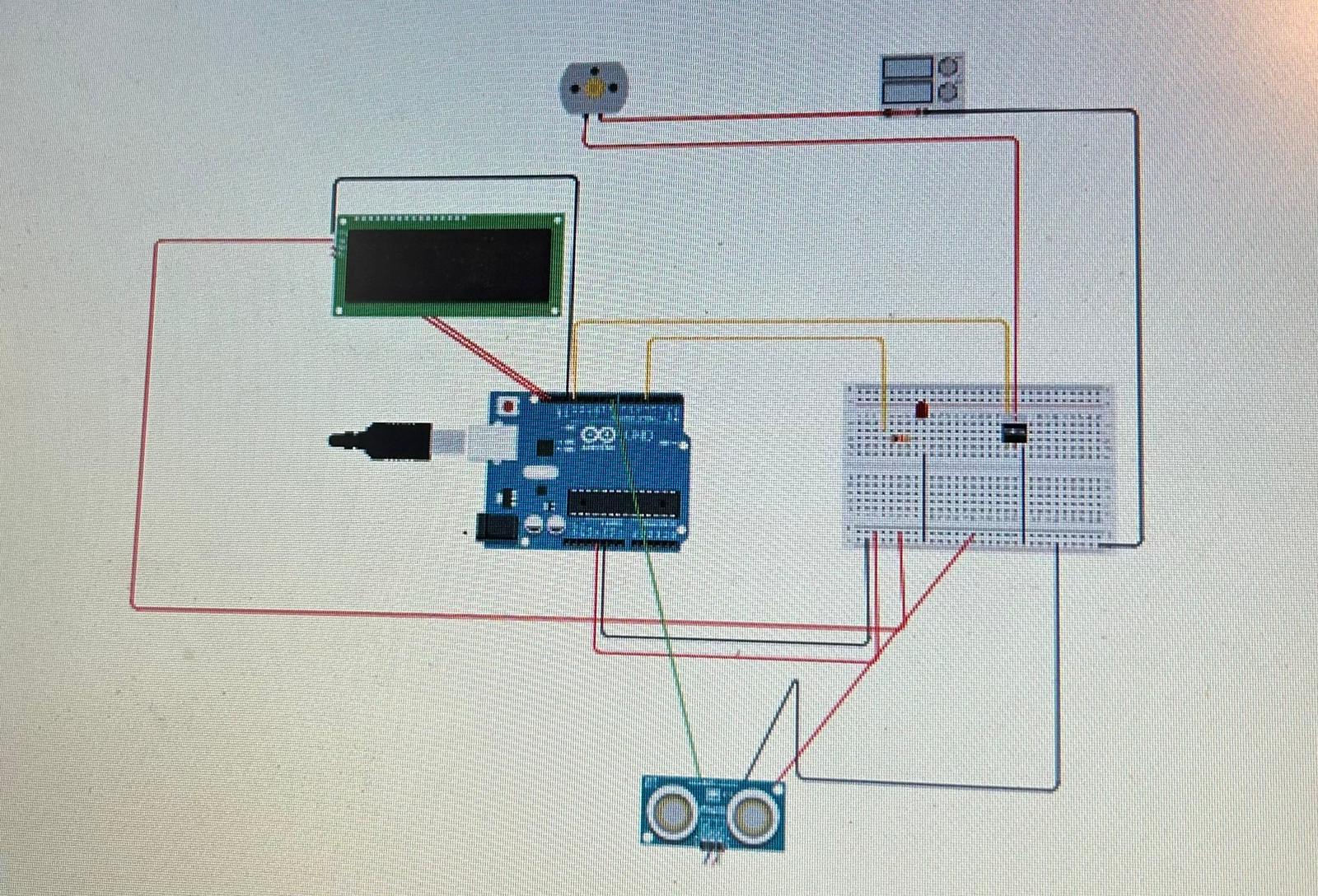
Figure 4 : Montage Tinkercad final
13/11/2024 :
-
Réunion de groupe
-
Préparation de schéma pour le montage
-
Ajustement support
-
Etablissement d’une liste supplémentaire de matériel
-
Transmission de la seconde liste à la tutrice
28/11/2024 :
-
Récupération du matériel manquant
05/12/2024 :
Réunion de groupe :
- Organisation d'une réunion pour coordonner les tâches et discuter de l'avancement du projet.
Branchements et essais du capteur :
- Réalisation des connexions nécessaires pour tester le capteur.
- Modification du code : bien que le code fonctionnait correctement dans Tinkercad, il s'est avéré incompatible avec le capteur physique à notre disposition, nécessitant des ajustements.
Préparation du support de la cuve d'eau :
-
- Découpage du support destiné à accueillir la cuve d'eau.


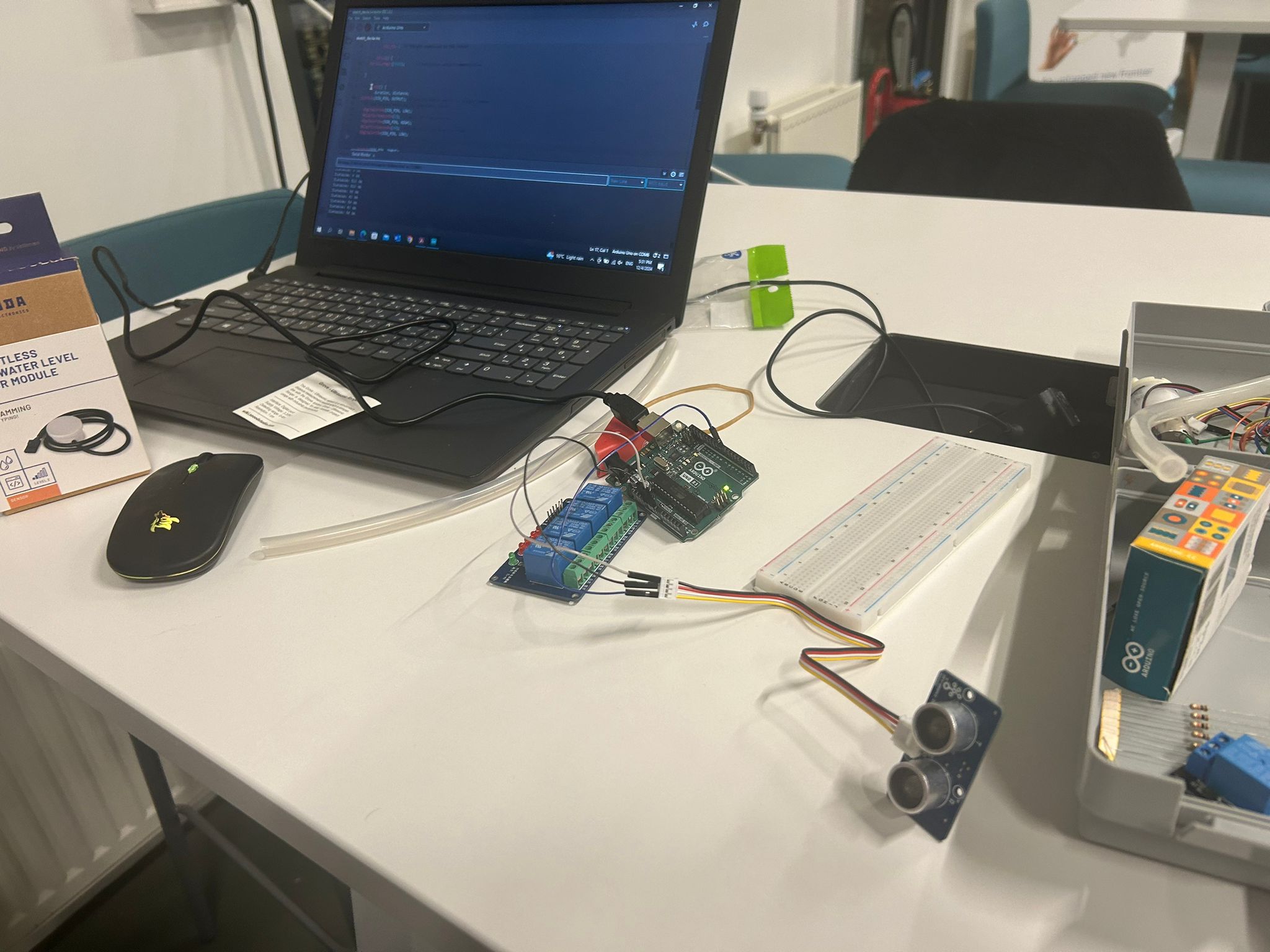
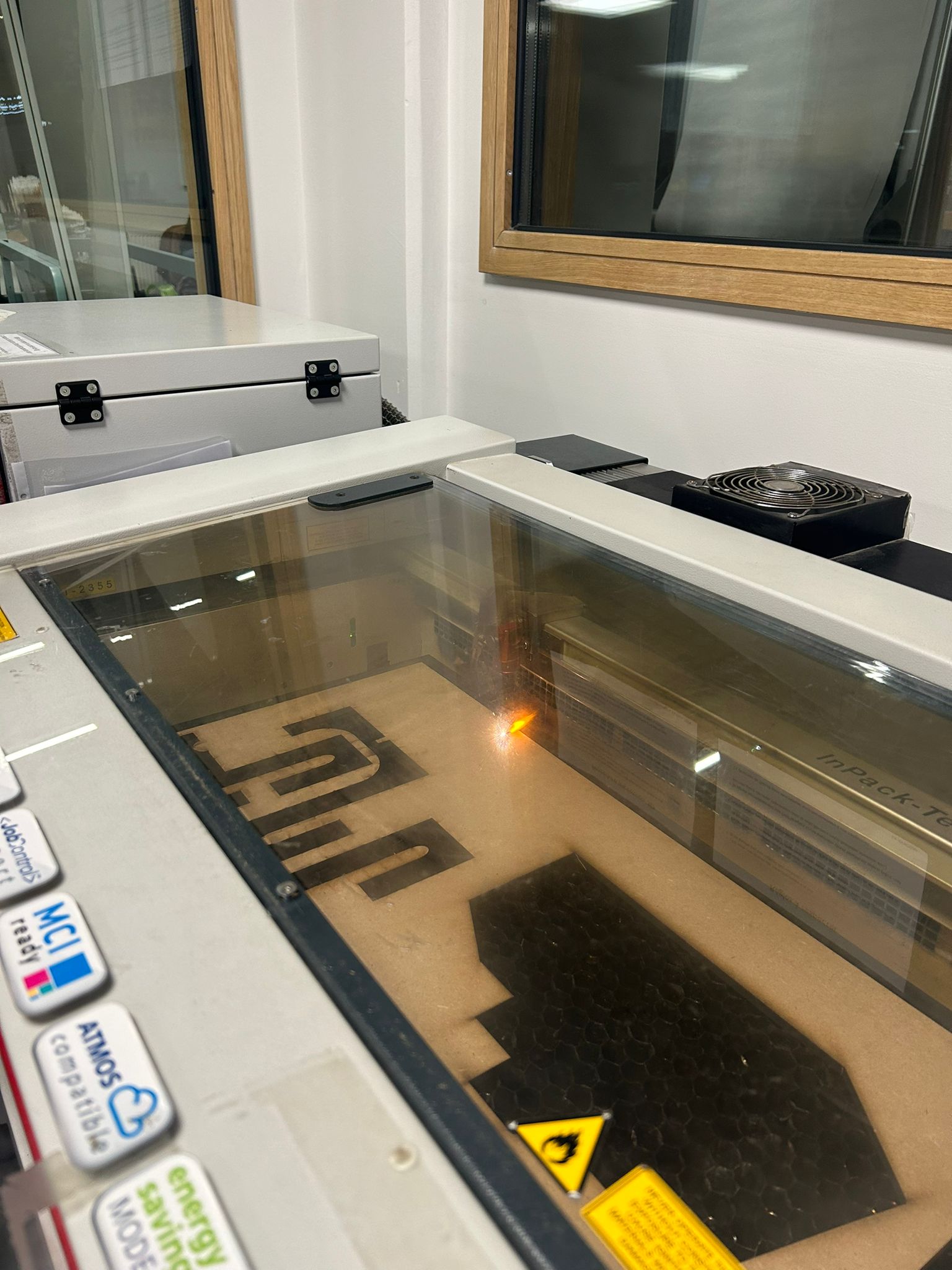
Figure 5 : Avancement du 05/12
11/12/2024 :
Branchements et essais de l'écran LCD :
- Réalisation des connexions nécessaires pour tester l'écran LCD.
- Téléchargement et installation de la bibliothèque appropriée pour le Grove - LCD RGB Backlight.
- Tests concluants de l'écran LCD en combinaison avec le capteur à ultrasons.
Préparation de la cuve d'eau :
- Fixation du support de la cuve d'eau.
- Installation du tuyau d'eau sur la cuve.
18/12/2024 :
Finalisation du code :
- Programmation des fonctionnalités liées à la pompe et à la LED.
Réalisation des branchements :
- Connexion de tous les équipements (LED, capteur ultrason, écran LCD, pompe).
- Observation d'une absence de réponse de la pompe malgré les branchements effectués.
Préparation du support :
- Prise des dimensions et préparation du support pour le montage final.
Dysfonctionnements identifiés :
-
- Détection d'un problème causé par un code défectueux lié au capteur, impactant le fonctionnement global
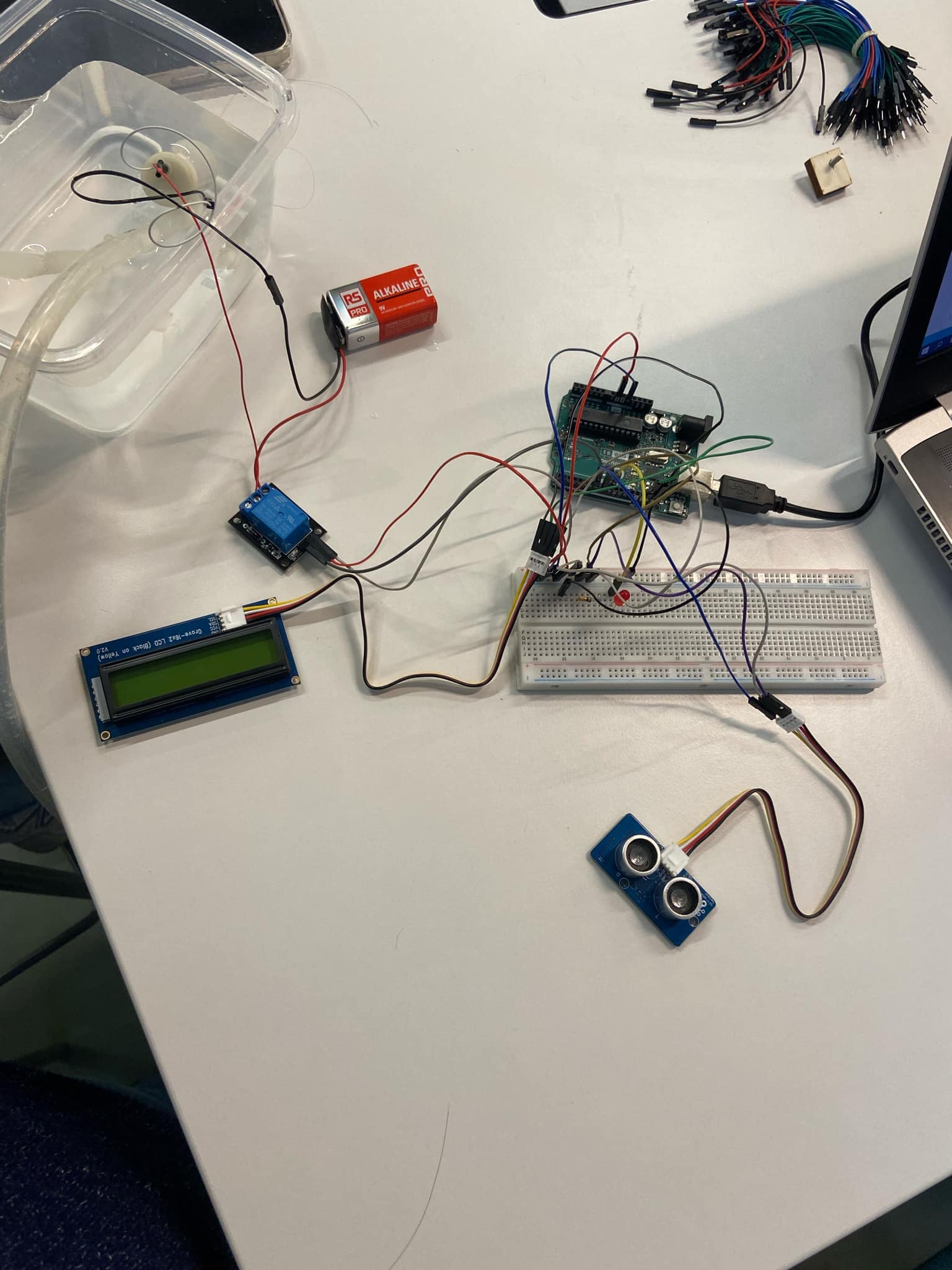 Figure 6 : Réalisation des branchements
Figure 6 : Réalisation des branchements
20/12/ 2024 :
Réunion de groupe en ligne :
- Organisation d'une réunion virtuelle pour coordonner les tâches et échanger sur l'avancement du projet.
Tests individuels des composants :
- Réalisation d'essais pour chaque composant en utilisant le code spécifique correspondant.
Diagnostic et solution :
-
- Identification d'un dysfonctionnement sur un côté de la breadboard.
- Adaptation en utilisant la partie fonctionnelle de la breadboard pour poursuivre les connexions et les tests.
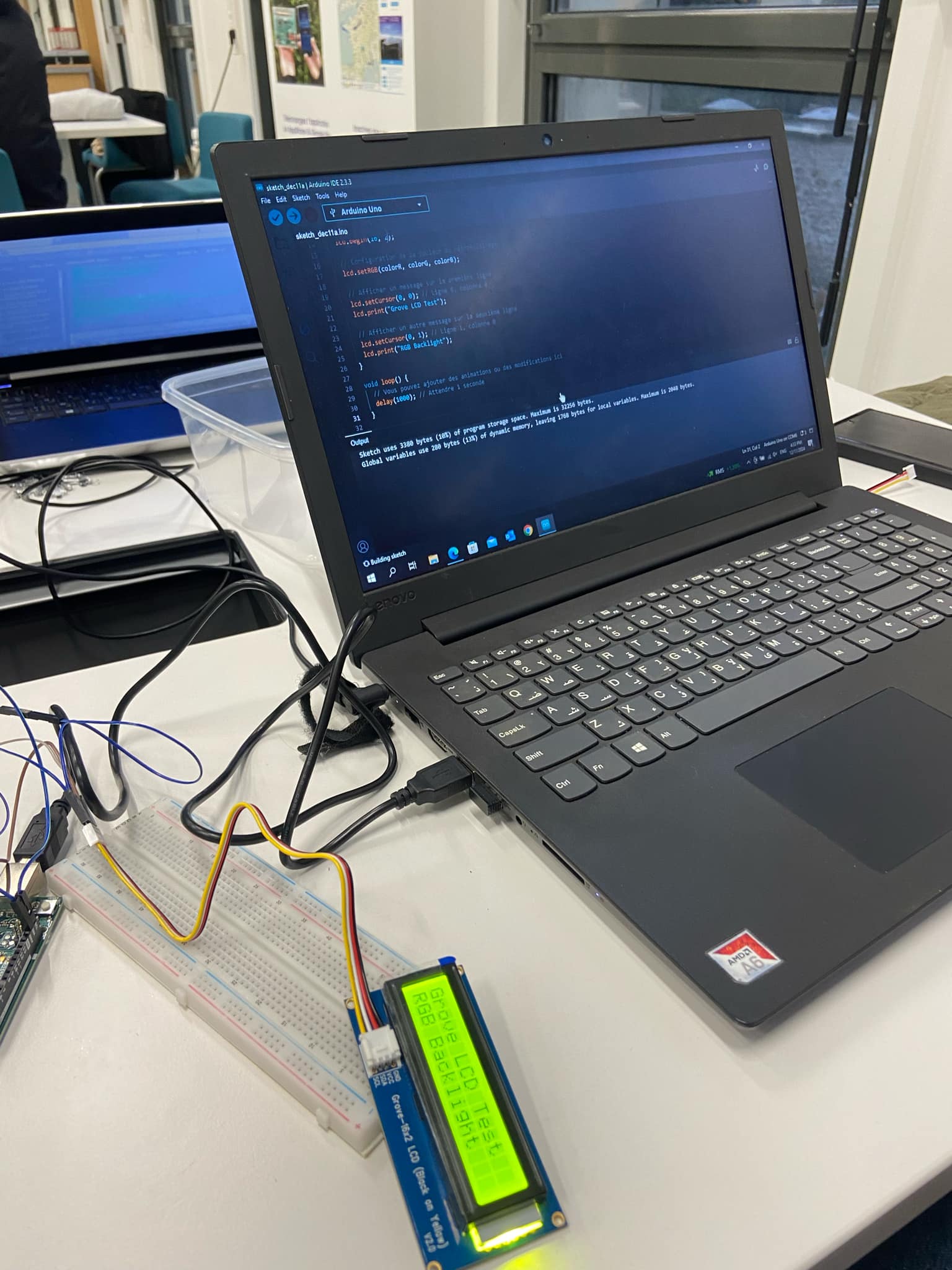
Figure 7 : Tests individuels des composants
08/01/2025 :
-
Réalisation du support de capteur :
- Découpe du support du capteur à l'aide de la machine TROTEC.
- Pliage du support à l'aide de la machine CRClarke.
Début du montage :
- Fixation des cuves d'eau sur le support principal.
- Perçage du support principal pour permettre le passage des câbles électriques nécessaires aux raccordements des différents équipements (pompe et afficheur) ainsi que des tuyaux.
- Installation de l'afficheur LCD et de la LED.
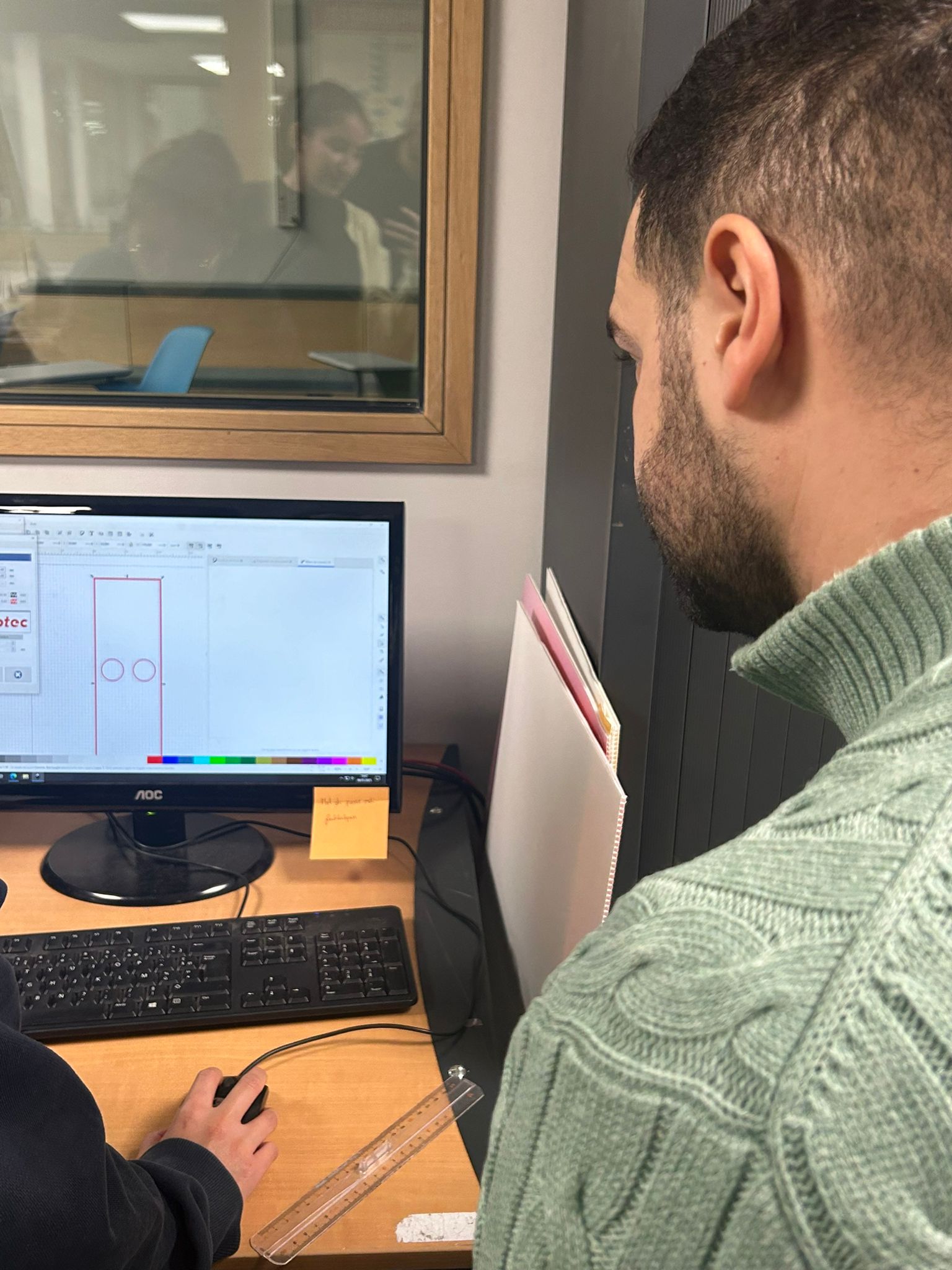




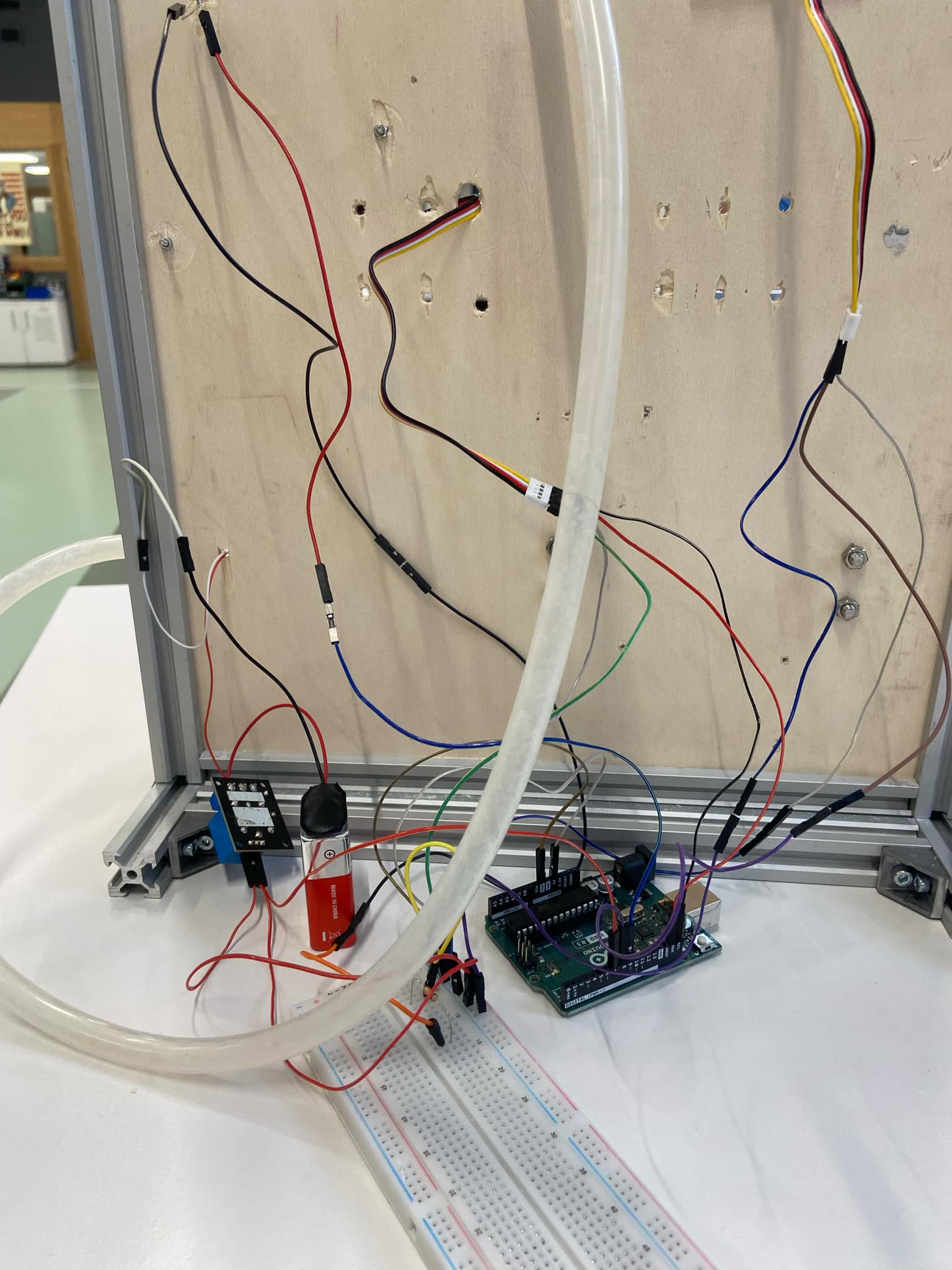
Figure 8 : Avancement du 08/01
15/01/2024 :
- Soudage des câbles électriques à la LED à l'aide d'un fer à souder.
- Poursuite du montage :
- Fixation du support de l'Arduino, du module relais, et de la breadboard à l'arrière du support initial.
- Gravure des noms et du thème du projet sur une planche en bois pour une finition esthétique.
- Test du code sur le montage et validation du bon fonctionnement.
Figure 9 : Avancement du 15/01
16/01/2024 :
Finalisation, résolution de problèmes et apport de touche finale au montage :
- Réalisation de gravures sur deux planches distinctes pour inscrire les noms et le thème, afin d'améliorer l'esthétique globale du montage.
- Identification et résolution de problèmes de code rencontrés lors de la mise en œuvre ; cependant, certains problèmes subsistent et nécessitent une analyse approfondie.
- Exploration d'une méthode de moyenne glissante à intégrer dans le code pour améliorer les performances et la précision.
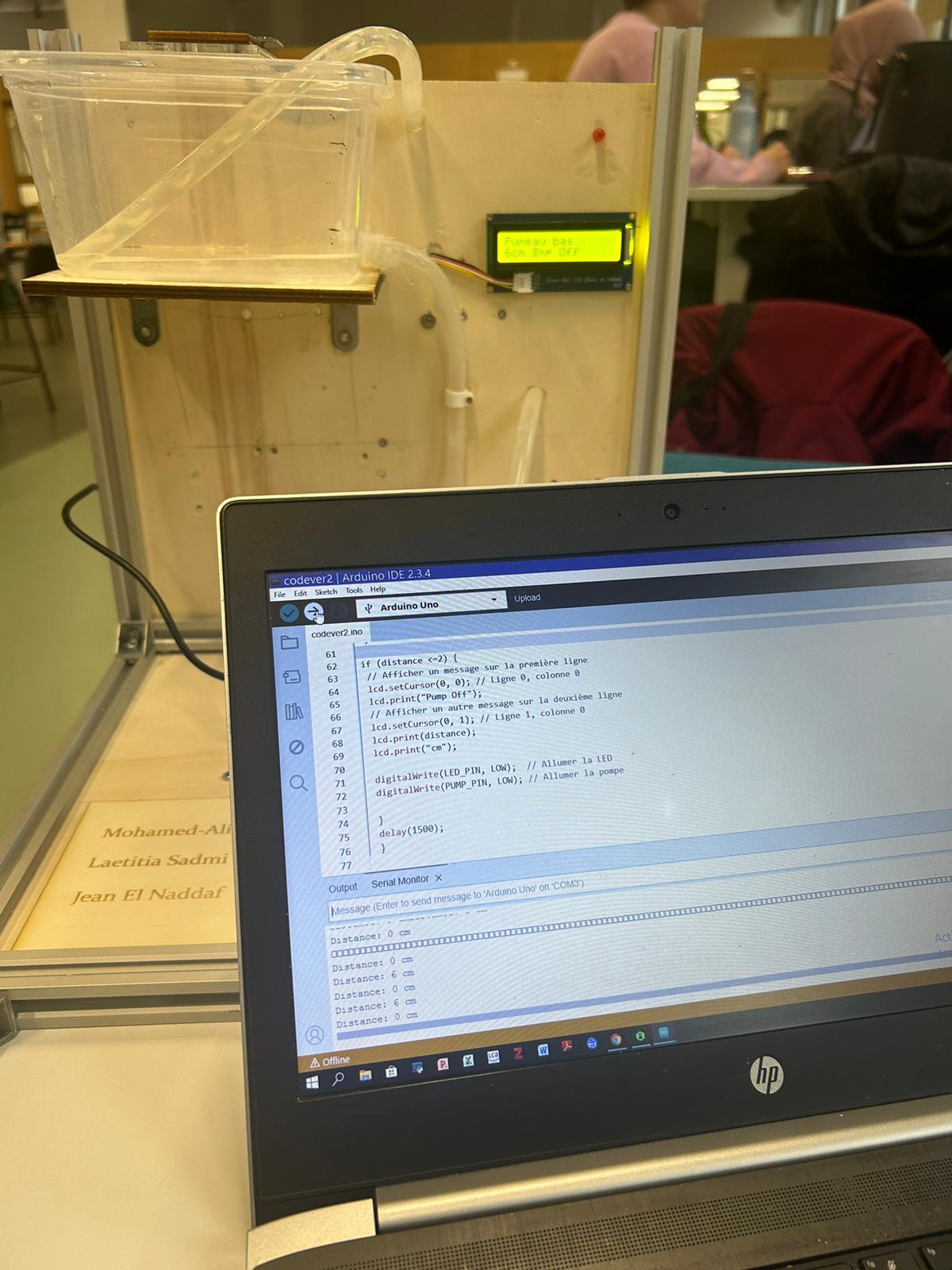


Figure 10 : Avancement du 16/01
17/01/2024 :
Tentatives de résolution des problèmes de code identifiés lors de la séance précédente en appliquant la méthode de la moyenne glissante.
La régulation est désormais pleinement fonctionnelle.
Nouvelle problématique rencontrée :
Un dysfonctionnement de l'affichage sur l'écran LCD a été identifié, causé par l'utilisation d'une bibliothèque incompatible.
Rôle de la moyenne glissante dans notre projet :
Dans notre projet, les mesures du capteur à ultrasons étaient fortement perturbées par les vibrations et les interférences générées par la pompe à eau, ce qui rendait les données imprécises et instables.
Dans un premier temps, nous avons opté pour une moyenne classique, consistant à calculer la moyenne arithmétique d'un ensemble de valeurs captées sur une période donnée. Bien que cette méthode ait permis de réduire partiellement les fluctuations, elle ne s'adaptait pas suffisamment à notre système de régulation.
Pour améliorer la précision, nous avons ensuite implémenté une moyenne glissante. Celle-ci calcule en temps réel la moyenne des n dernières valeurs mesurées, en actualisant constamment les données au fur et à mesure des nouvelles lectures. Cette méthode s’est avérée plus efficace, car elle permet de lisser les variations tout en suivant les évolutions rapides des mesures.
En comparant les deux approches, nous avons constaté que la moyenne glissante offrait des données plus précises et stables, tout en réduisant significativement l'impact des perturbations de la pompe à eau sur les relevés du capteur.
Code final :
#include <Wire.h>
#include "rgb_lcd.h"
// Initialisation de l'écran LCD
rgb_lcd lcd;
// Définition des couleurs RGB
const int colorR = 255; // Rouge
const int colorG = 0; // Vert
const int colorB = 255; // Bleu
#define SIG_PIN 8 // SIG pin connected to the sensor
#define LED_PIN 9 // Pin 9 connecté à la LED
#define PUMP_PIN 7 // Pin 7 connecté à la pompe
#define WINDOW_SIZE 10 // Taille de la fenêtre pour la moyenne glissante
float measurements[WINDOW_SIZE]; // Tableau pour stocker les mesures
int index = 0; // Index actuel dans le tableau
int count = 0; // Nombre de mesures ajoutées (jusqu'à WINDOW_SIZE)
float sum = 0; // Somme des valeurs dans le tableau
void setup() {
Serial.begin(9600);
// Initialisation de l'écran avec 16 colonnes et 2 lignes
lcd.begin(16, 2);
// Configuration de la couleur du rétroéclairage
lcd.setRGB(colorR, colorG, colorB);
pinMode(LED_PIN, OUTPUT); // Initialise la broche 9 comme sortie
pinMode(PUMP_PIN, OUTPUT); // Initialise la broche 7 comme sortie
}
void loop() {
lcd.clear();
float duration, distance;
float movingAverage;
lcd.clear();
// Envoi de l'impulsion de trigger à l'ultrason
pinMode(SIG_PIN, OUTPUT);
digitalWrite(SIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(SIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(SIG_PIN, LOW);
pinMode(SIG_PIN, INPUT);
duration = pulseIn(SIG_PIN, HIGH);
// Conversion de la durée en distance (cm)
distance = duration * 0.034 / 2.0;
// Mise à jour du tableau circulaire pour la moyenne glissante
sum -= measurements[index]; // Retirer la valeur actuelle du tableau de la somme
measurements[index] = distance; // Ajouter la nouvelle mesure au tableau
sum += distance; // Ajouter la nouvelle mesure à la somme
index = (index + 1) % WINDOW_SIZE; // Passer à l'index suivant (circulaire)
if (count < WINDOW_SIZE) {
count++; // Incrémenter le nombre de mesures jusqu'à atteindre WINDOW_SIZE
}
// Calcul de la moyenne glissante
movingAverage = sum / count;
Serial.print(movingAverage);
Serial.println(" cm");
if (movingAverage >= 4) {
digitalWrite(LED_PIN, HIGH); // Allumer la LED
digitalWrite(PUMP_PIN, HIGH); // Allumer la pompe
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Pump On");
}
else if (movingAverage <= 2 && movingAverage > 0.7) {
digitalWrite(LED_PIN, LOW); // Éteindre la LED
digitalWrite(PUMP_PIN, LOW); // Éteindre la pompe
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Pump Off");
}
else if (movingAverage <= 0.7 && movingAverage >= 0) {
lcd.clear();
delay(50);
}
else if (movingAverage <= 4 && movingAverage > 2) {
lcd.clear();
}
delay(750);
}
Lien drive vers une vidéo démonstrative : https://drive.google.com/drive/folders/1Vl2MxxTgznQfRN5DDF0JkZ3zPN5uSHpV?usp=sharing
24/01/2024 : Date prévue pour la présentation du montage et du code finalisés.
Conclusion
Au fil des semaines, ce projet nous a confrontés à divers défis, notamment des incompatibilités entre les simulations sur Tinkercad et le matériel physique, des erreurs dans le code nécessitant des ajustements, ainsi que des difficultés liées à l’assemblage et au fonctionnement des composants. Ces obstacles, bien que parfois complexes et exigeants, ont représenté une occasion précieuse de développer nos compétences en résolution de problèmes et d’affiner notre approche méthodique face aux imprévus.
Travailler en équipe sur ce projet nous a également permis d’améliorer notre coordination et de mieux répartir les responsabilités, tout en apprenant à collaborer de manière efficace et structurée. Chaque étape, de la conception initiale à la démonstration finale, a contribué à enrichir notre compréhension des systèmes automatisés et des outils technologiques accessibles, tels que les microcontrôleurs et les capteurs.
Bien qu’il s’agisse d’une maquette simplifiée dans un cadre pédagogique, ce projet nous a offert un aperçu réaliste des défis que l’on peut rencontrer dans des projets industriels réels. Il a également illustré l’importance de la rigueur, de l’adaptabilité et de la créativité dans la mise en œuvre de solutions techniques.