**Étape 1 : *S'approprier Arduino ainsi que le projet avec la modélisation de notre appareil à photogrammétrie.***
**Étape 2 :** *Réflexion/Réalisation des premières* *pièces par modélisation 3D ainsi qu'un travail de recherche sur le code du moteur pas à pas.*
**Étape 3 :** *Modification et ajustement des pièces du projet et réalisation du code pour la (les) caméra(s).*
**Étape 4 :** *Assemblage de toutes les pièces modélisées ainsi que des deux codes, afin de réaliser les premiers tests.*
**Étape 5 :** *Réaliser les premiers tests avec un objet à prendre en photo avec un logiciel de photogrammétrie permettant la réalisation de l'objet en 3D.*
**Étape 6 :** *Paramétrer une application permettant la réalisation des photos.*
##### **Étape 7 :** *C'est déjà un beau projet* #### Matériel - Carte Arduino Uno - Module caméra ArduCam mini 5MP Plus OV5642 - Moteur NEMA - Motor shield (--> branchement pour le moteur et la caméra) - Câblages - Logiciel de modélisation 3D #### Résultats Lors de ce dernier semestre de licence nous avons eu la chance travailler sur un projet sur la photogrammétrie, le but étant de réaliser le maximum d'étapes prédéfinies (pas obligatoirement la fin du projet). #### Journal de bord**Attention : Les valeurs inscrites sont les valeurs erronées et le fichiers FCStd a été réduit en hauteur**
Fichiers STL et FCStd de la pièce décrite : [Coulommiers-Support.stl](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/1842) [Coulomier final.FCStd](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/1841) **ARDUINO** Familiarisation réalisation avec le logiciel Arduino et d'un premier montage : - Matériels : - Arduino Uno + câble USB de liaison Arduino/Ordinateur - Câbles de connexion - Moteur pas à pas 28 BYJ-48 - Schéma de connexion : [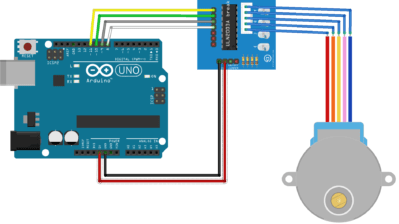](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-02/montage-step-motor-28byj-48.png) - Code : - Ce code permet au moteur de réaliser une rotation dans le sens des aiguilles d'une montre, attendre 1 seconde(s), puis de faire une rotation dans le sens contraire des aiguilles d'une montre, puis de nouveau attendre 1 s. ``` #include--> Prochaine étape : Réaliser le montage avec ajout d'un potentiomètre permettant de contrôler la vitesse de rotation ainsi que le sens (--> potentiomètre vers la droite= sens des aiguilles d'une montre ; potentiomètre à gauche = sens inverse )
Après plusieurs échecs, et des changements de codes, succès de la manipulation. Notre moteur se déplace de l'angle 0 à l'angle 90, puis à celui 180 avant de revenir à 0 et de recommencer sa boucle. Après chaque déplacement celui-ci fait une pause de 1 s. Notre moteur avance degré par degré.
--> Prochaine étape : Modification de notre code pour réaliser un mouvement de 20° en 20° avec 1 s de délai entre chaque déplacement.
J'ai cramé la batterie brique de 12 V... Surement un problème dans mon montage.
Réalisation d'un autre montage avec le moteur NEMA 17, moteur pas à pas de 12 V : - Matériels : - Arduino Uno + câble USB de liaison Arduino/Ordinateur - Câbles de connexion - Moteur Shield - Moteur NEMA 17 pas à pas - Schéma de connexion : [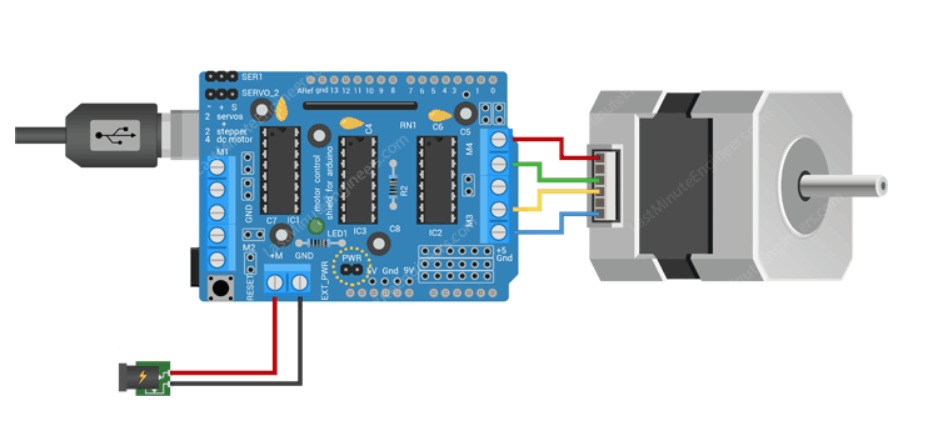](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/bn5capture-decran-2026-03-20-102959.jpg) - Code : - Ce code permet au moteur de réaliser une rotation dans le sens des aiguilles d'une montre, attendre 1 seconde(s), puis de faire une rotation dans le sens contraire des aiguilles d'une montre, puis de nouveau attendre 1 s. ``` #includeCe 2ème code est très probablement mieux mais manque de fluidité de mouvement : il ne réalise pas forcément tout le temps 20° degré mais parfois moins et de manière saccadé. Il réalise donc 11 pas pour faire les 20° demandées ; pause de 2 secondes ; puis reprends pour faire un tour complet de 20 par 20 ; pause de 10 s.
Ce code rend le moteur extrêmement bruyant en plus du mouvement saccadé.
[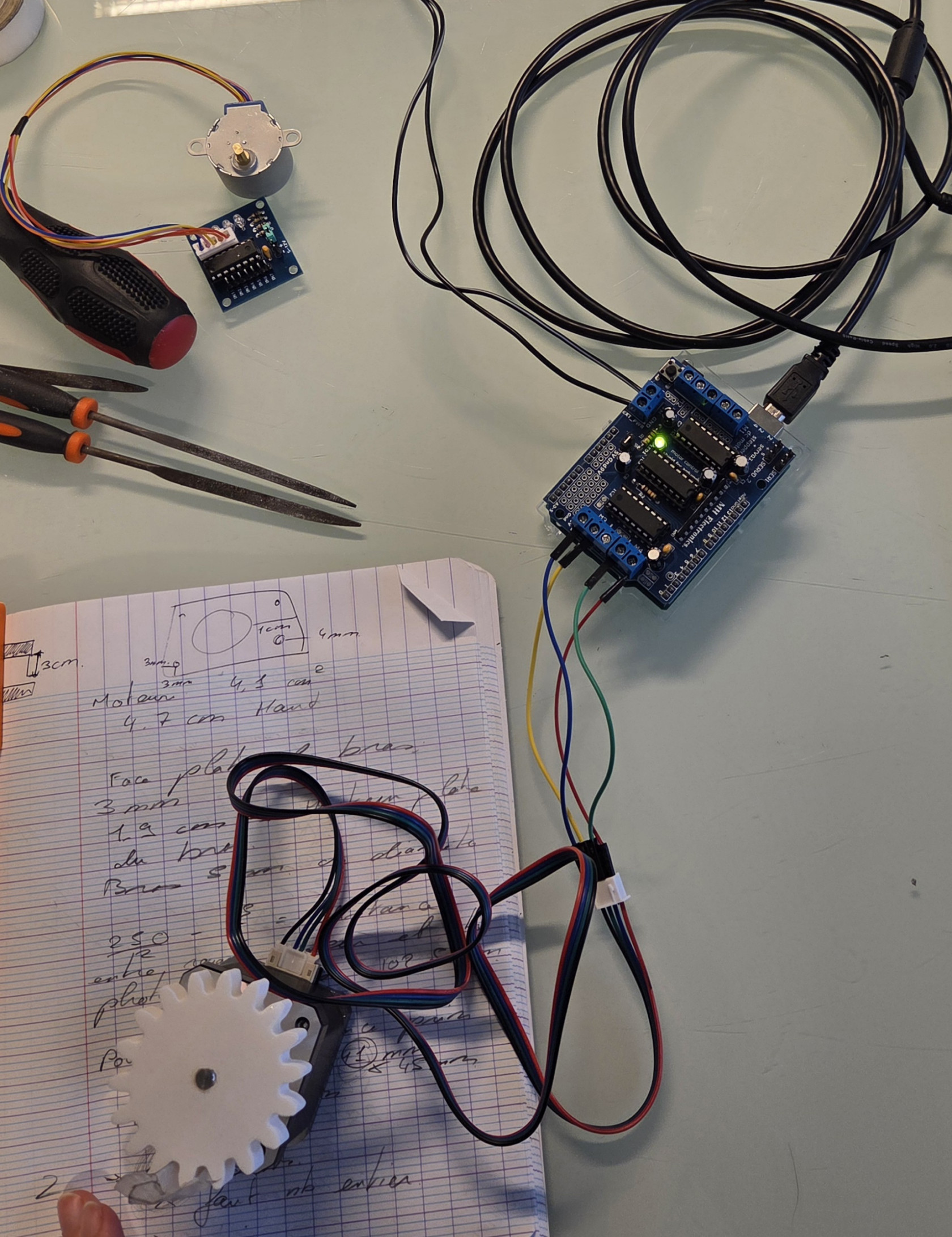](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/20260227-155241.jpg)[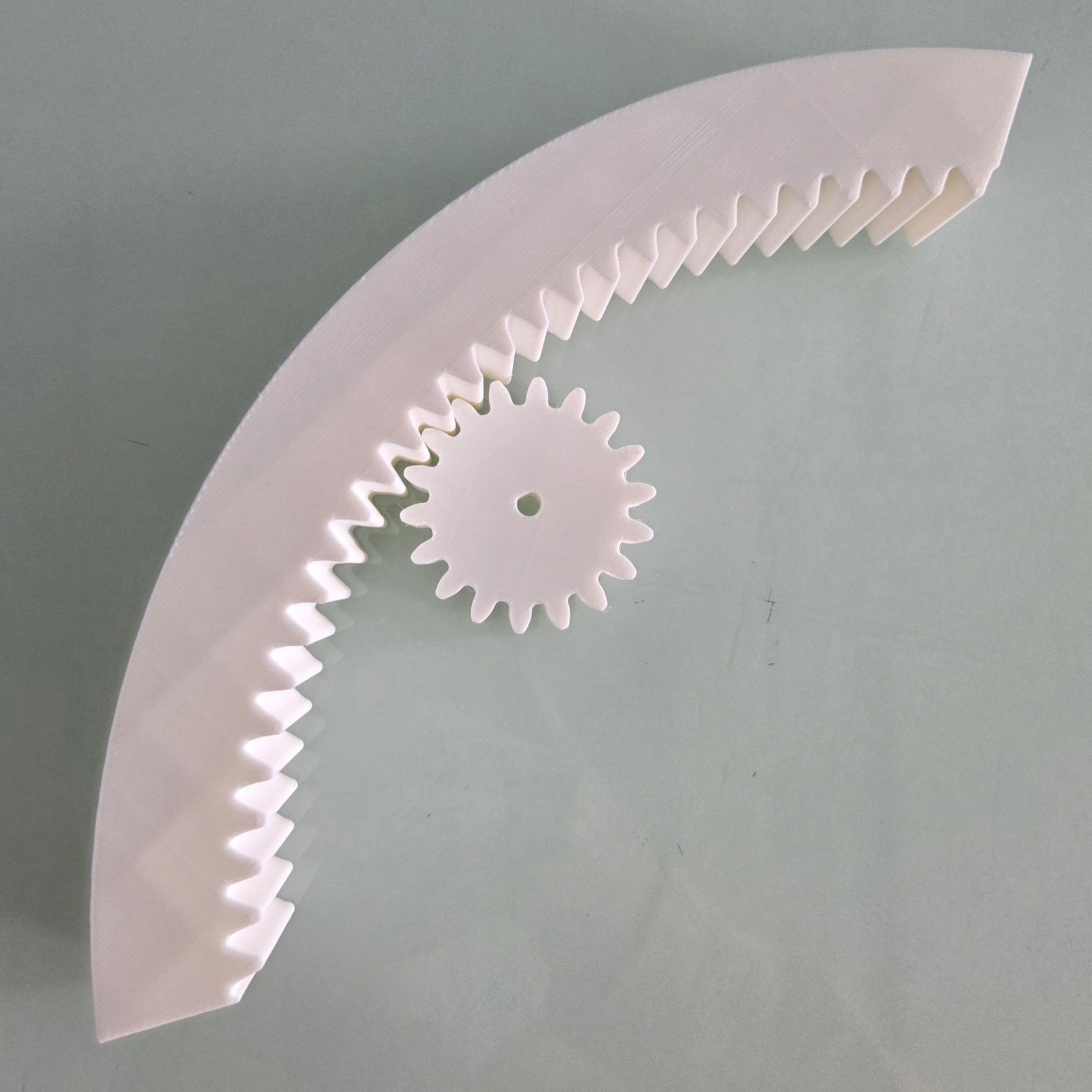](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/20260227-134741.jpg)*62 pas x 18 positions = 1 116 pas # 1 111 pas ! => possibilité d'alternance entre 62 et 61 pas pour obtenir pile 360° *
- - Pour éviter que le moteur soit saccadé on peut voir pour augmenter la vitesse de déplacement/ ou la diminuer. ``` #includeToujours un problème de fluidité, voir pour améliorer le 1er code ou le 2ème.
Test de différentes vitesses : 5 et 30 plus ou moins OK, toujours saccadé et bruyant --> voir microstep ?
*Recherche pour les caméras : **Arducam Shield Mini 5MP Plus** :* - Montage possible : [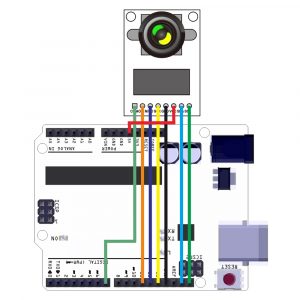](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/arduinoconnection-300x300-cablage-camera.jpg) - - Carte SD nécessaire ? - Dans ce montage, le module caméra 5MP serait utilisé avec une carte Arduino UNO pour capturer des images à intervalles réguliers. Sans carte microSD, les photos ne peuvent pas être stockées directement sur le système embarqué. - À la place, les données de l'image au format JPEG seront envoyées via la liaison série (USB) vers un ordinateur. L'Arduino déclenche une prise de vue, transmet les données binaires correspondantes, puis attend 30 secondes avant de recommencer (pour notre projet). - Comme l'Arduino Uno possède une mémoire limitée, il est nécessaire de réduire la résolution des images afin d'assurer un fonctionnement stable. --> utilisation d'une autre carte ? - Les images reçues sur l'ordinateur peuvent ensuite être reconstruites et visualisées à l'aide d'un programme externe, par exemple en Python.**Prochaine séance -->** Test de 25 - 5° pour améliorer la fluidité + CAMÉRAS ! redemander les bibliothèques.
**Le bras a due être sectionné pour l'impression !**
Fichiers STL et FCStd de la pièce décrite : [Bras.stl](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/1838) [Bras.FCStd](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/1837)**!!!! Comprendre les caméras !!!!**
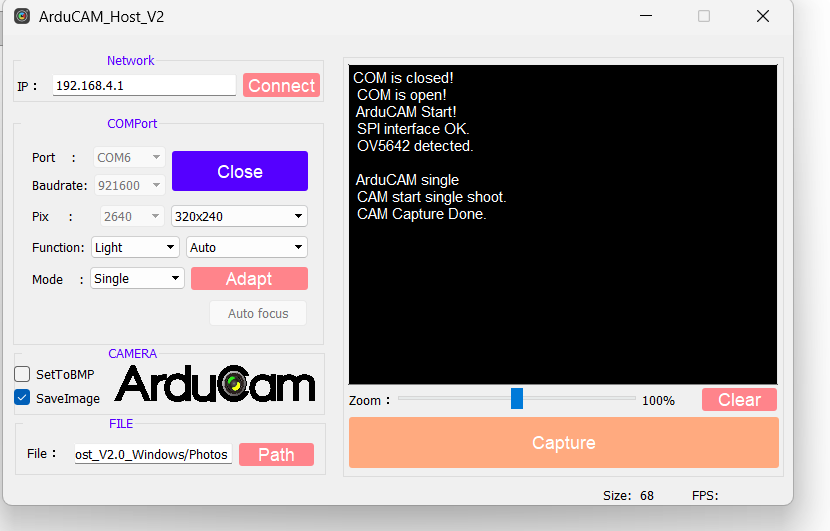
- Matériels : - Arduino Uno + câble USB de liaison Arduino/Ordinateur - Câbles de connexion - Module caméra Mini 5MP Plus OV5642 - Schéma de connexion : [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/arduinoconnection-300x300-cablage-camera.jpg) - Code : - Essais avec énormément de codes différents, beaucoup de difficultés pour ce qui est de comprendre l'utilisation des différentes fonctions lié à la caméra.**D'après le logiciel on arrive à prendre des photos (ArduCam Host App --> photo ci-dessous)**
**Où sont les photos !?** C'est le plus gros des problèmes, réussir à retrouver les photos et savoir si celle-ci se sont réellement enregistrées ou non, ou si plus généralement on arrive vraiment à prendre des photos.
**Pour la prochaine séance -->** résoudre le problème : où sont les photos ?!?
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/capture-decran-2026-03-27-163719.png)**Objectif : se débarrasser du problème CAMÉRA ! Où sont les photos sur l'ordinateur ? Les photos sont-elles prises ?**
[https://www.arducam.com/camera-modules/5mp-ov5642/](https://www.arducam.com/camera-modules/5mp-ov5642/) Fab a du fil à retordre Le code photo fonctionne, il est possible de prendre des photos !!!!!! On sait où elles sont !**Nos différents problèmes avec les photos maintenant qu'on sait où elles sont :**
- Au bout d'un certain nombre de photos, il n'est plus possible d'en prendre (D'après Claude c'est un problème de FIFO où Host App/Arduino essaye de lire la photo avant qu'elle ne soit prise). - Il faut trouver un moyen d'automatiser les photos pour un tour complet de coulommiers. - Reste à savoir si fonctionne avec deux caméras. **Partie conception 3D : Révision du coulommiers** La première version du coulommiers avait un léger problème de dimension. Notamment avec ses 20 centimètres de haut. En réalité, le coulommiers ne nécessite que 4 centimètres de haut. Autre problème auquel faire face... 60 centimètre de diamètre sort du plateau d'impression de l'imprimante 3D. Ainsi le nouveau coulommiers ne fait "que" 4 centimètre de haut, est monté sur un un plateau support de 5 millimètres de diamètre permettant le roulement de la pièce arrière. La structure montante du coulommiers est creuse, permettant d'user de moins de plastique. Le coulommiers a été modélisé en quart, avec des pièces mâles femelle basales permettant un montage en puzzle. Ces structures sont ainsi disposées pour limiter un maximum au support moteur de rouler sur des failles. Cependant la partie mâle dépasse toujours du support d'impression. La pièce est encore à revoir. Durant cette révision, le plateau support sera retravaillé afin de limiter au mieux l'usage de plastique. Fichiers STL et FCStd de la pièce décrite : [Coulommiers rerererererererevisité-Cut.stl](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/1836) [Coulommiers rerererererererevisité.FCStd](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/1835) [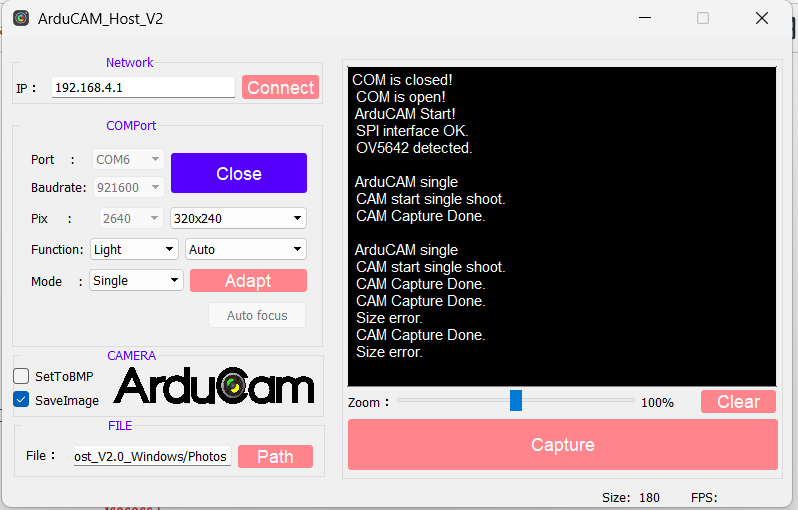](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/04-blabla.png)***!!!! Rappel important !!!!* : Nous avons désormais des photos et on sait où on peut les retrouver !**
**Les différents problèmes de la dernière fois qu'on a réussi à régler :**
- En reprenant le code de la dernière fois pour faire les photos, ce n'était pas possible de faire des photos multiples. On a donc chercher un autre code, que l'on a par la suite légèrement modifier afin de prendre plusieurs photos a la suite. Grâce à ce code on a donc pu prendre plusieurs photos d'affiler sans problème de FIFO mais également d'un sens à automatiser pour réaliser un tour complet du Coulommiers. On peut régler le nombre de photos que l'on veut réaliser et le temps d'attente donc entre chacun d'entre elles.**LES SOUCIS :**
- On ne sait pas si c'est toujours possible d'avoir deux caméras pour le bras. - Il va falloir combiner le code du moteur avec le code de la caméra en réfléchissant au problème suivant : une ou deux Arduino ? Comment faire avec le Shield motor ? Est ce que la caméra acceptera l'alimentation en 12 V nécessaire pour le moteur ? (Parce que pas de possibilité de changer de Shield motor --> seul compatible avec le 12 V pour le moteur NEMA) Arduino maitre/esclave ? - Il faut revoir le mouvement du moteur sur le Coulommiers terminé pour être sur de ses différents déplacement et degré de rotation : seulement une partie pour le moment. - Faire premier test de montage des différentes pièces de notre Tournicayou**Pour la prochaine séance -->** Test d'ajouts de pin sur le Shield moteur pour brancher donc le motor NEMA et la caméra dessus avec les pin analytiques + Imprimer un Coulommiers entier pour pouvoir réaliser les tests moteurs sur tout le tour du Coulommiers et par la suite combiner code moteur et code caméra !
**Notre joli coulommiers est arrivé, il est tout beau et tout coloré !** (Photo ci-joint)
**Nos pitits problèmes de la séance : 1er vrai test montage de notre "Tounicayou"**
**Nécessité de re modélisation de certaines pièces** Aujourd'hui nous avons essayé de monter les différentes pièces toutes ensembles. Plusieurs problèmes se sont alors présentés à nous: - Les puzzles (Coulommiers) ont des marges d'erreurs sur estimées. Il faudrait à l'avenir les repenser afin de faciliter le montage. Toutes les complémentarités sont à revoir, nonobstant, celle entre le socle moteur et la pièce arrière est primordiale. - La pièce arrière avait été pensée pour avoir une roue permettant de faire encoche avec le coulommiers, permettant alors de maintenir le tout sans branlements. Il faudrait donc, soit retirer la buté, soit redesigner la pièce dans son ensemble. - Le support moteur est à retravailler. Imaginé au départ comme nécessitant une pièce complémentaire pour être stable, il devra dorénavant obtenir une stabilité autonome. L'idée sera d'ajouter des butes sur le bord distal au foyer du coulommiers. Plusieurs modèle de butes seront testés. - Le coulommiers en lui même ne sera pas modifié, mais des explications supplémentaires quant à sa conception peuvent être ajoutées. Le principe du coulommiers est de permettre une rotation d'un bras photographique autour du support -substituant la rotation du support lui même-. Les dents sont sur la surface interne du coulommiers **Pourquoi ? -->** Pour permettre un ancrage par le rouage et une autre encoche à la surface opposée. L'idée de rouage sur sur le coté haut du coulommiers a été proposée. Elle ne nous semble que peu adéquate au projet. En effet, elle poserait plus de problèmes, nécessitant deux encoche, et un rouage circulaire à la Citroën. IMPOSSIBLE. [ *Le coulommiers tout coloré et Lucas* ](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/20260417-133720.jpg)*[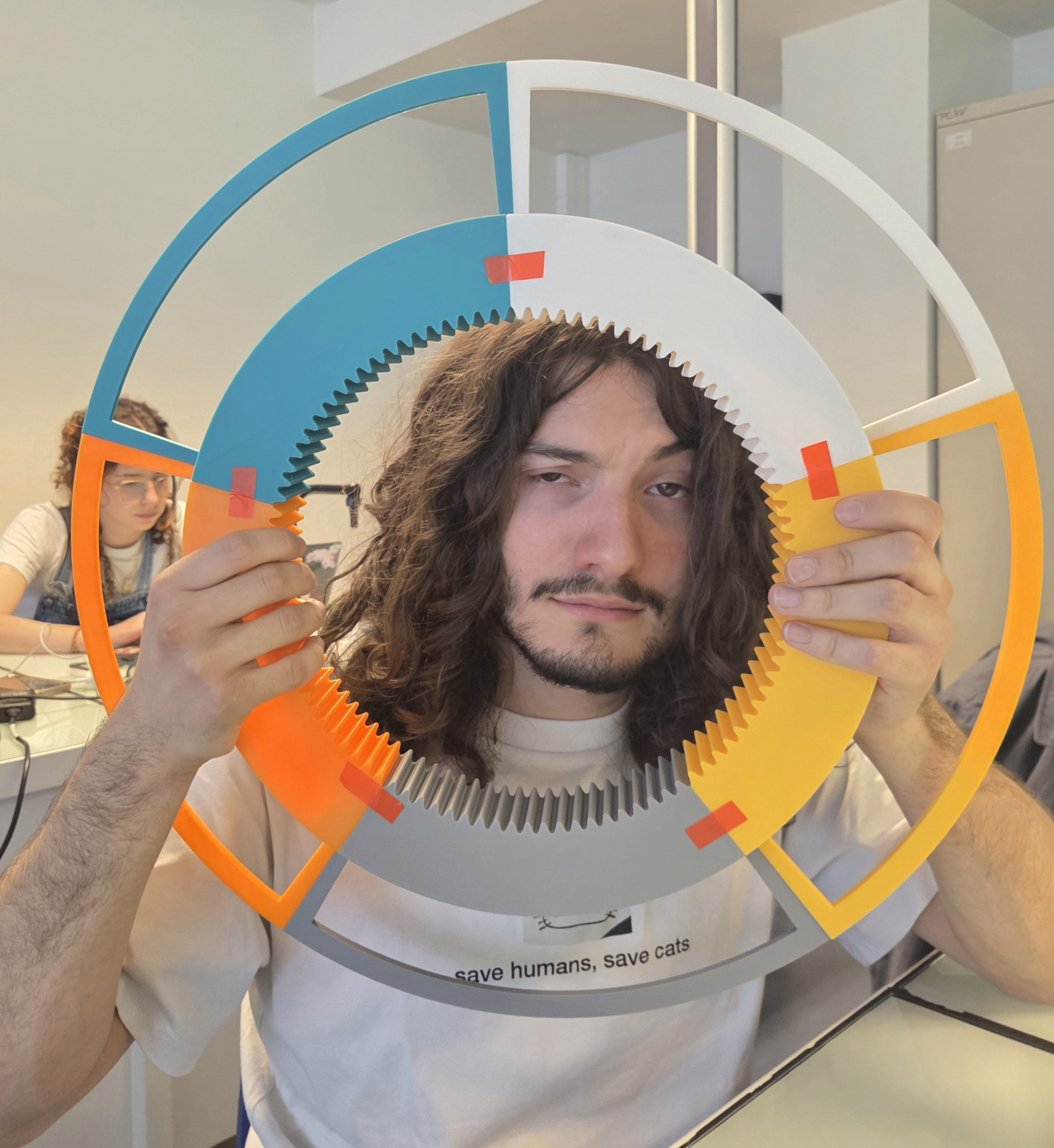](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/20260417-1537470.jpg)* [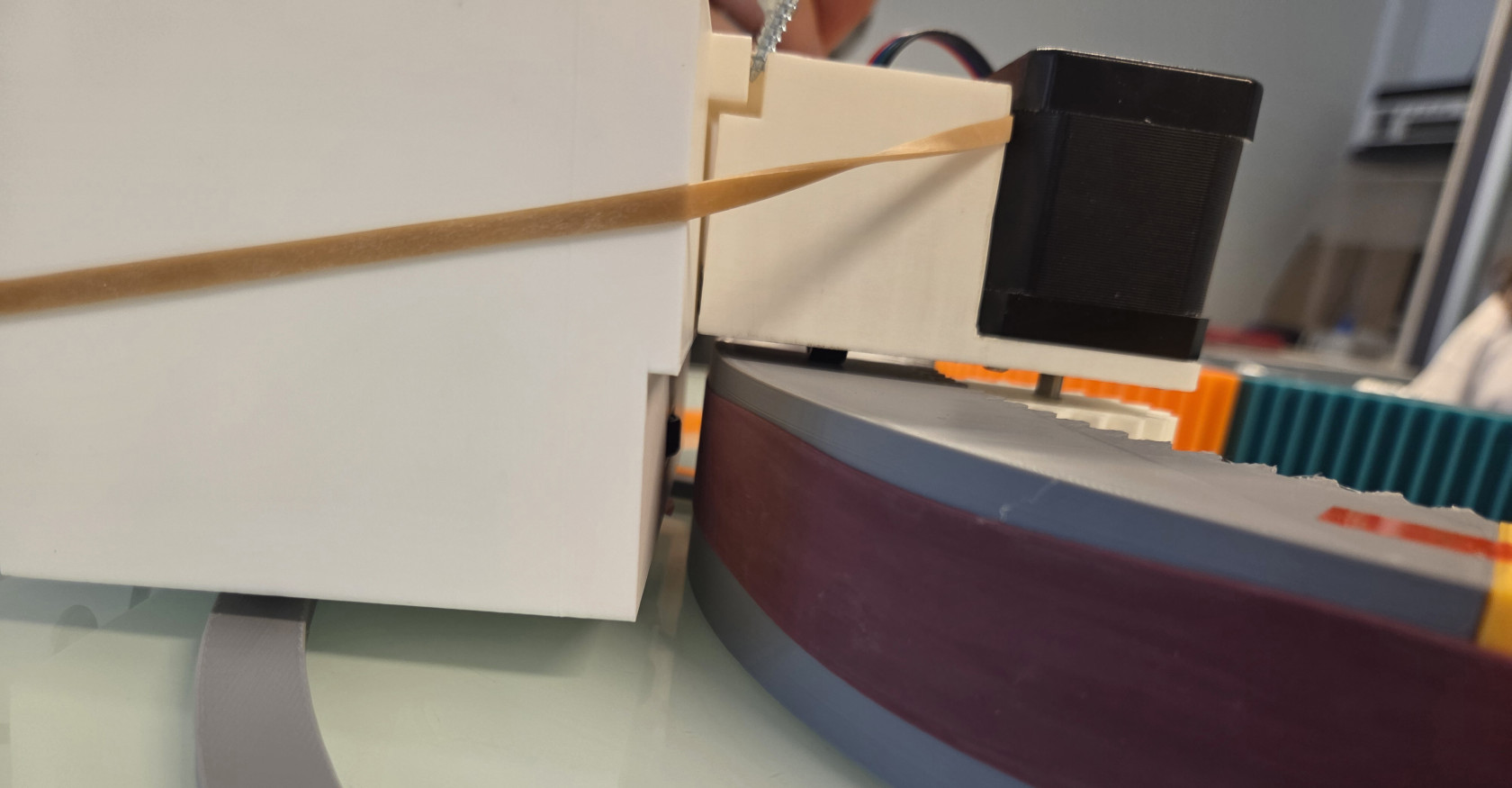](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/20260417-154904.jpg)**PR = photo résistance**
#### **** **[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/CSyimage.png)Montage 1 :** Gérer le moniteur - Lecture d’intensité **Matériel :** Une PR + une résistance reliée à Arduino (utilisation du serial monitor) **But :** Mesure d’intensité de la lumière : **Intensité d'entrée 1 = forte - Intensité d'entrée 2 = moins forte** **Résultat :** Selon l'intensité lumineuse 1 ou 2 il y a une mesure du voltage (V out) par Arduino différente et avec le Serial Monitor on obtient une valeur d’intensité de sortie différente. **[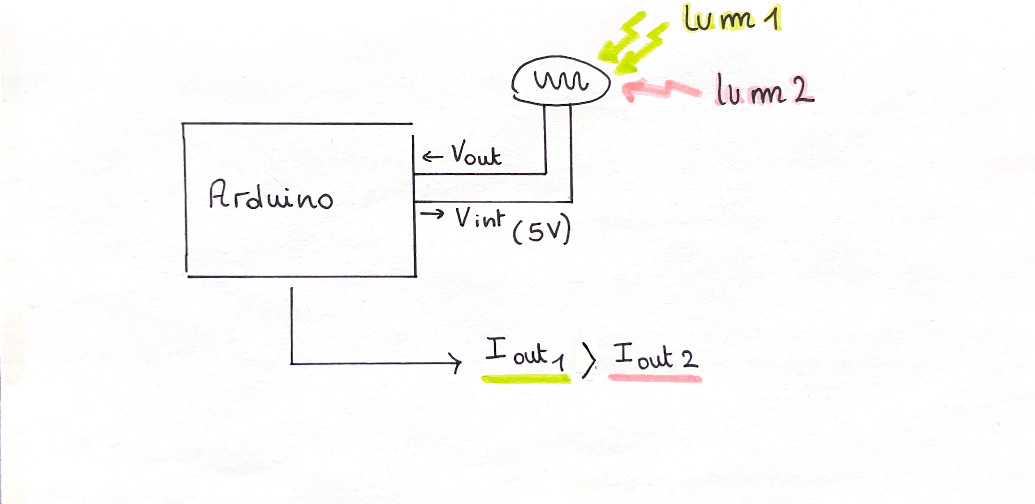](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-02/img-2162.jpg)** **Montage 2 :** Compteur intelligent **Matériel :** 2 PR (+résistances) en parallèles reliées à Arduino + une diode **But :** Création d'un montage plus complexe avec plusieurs photo résistances pour mimer l'effet de l'érosion. On souhaite montrer que si la PR 2 reçoit de la lumière et pas la PR 1 la donnée n'est pas fiable **Si diode s’allume = donnée reçue** **Attentes :** **- Si lumière sur PR 2 =** diode ne s'allume pas **- Si lumière sur PR 1 =** diode s’allume **- Si lumière sur PR 2 et Photo résistance 1 =** diode s’allume **[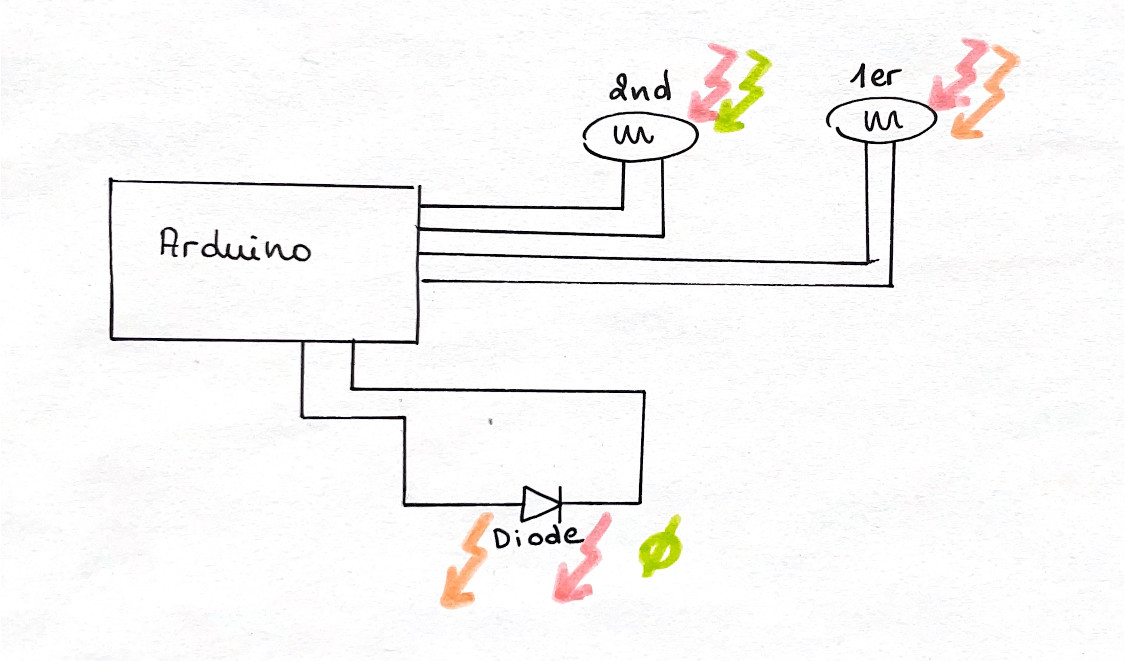](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-02/img-2161.jpg)** **Montage 3 : **Mesure de référence de l’intensité ambiante **Matériel :** 2 PR (+résistances) en parallèles reliées à Arduino + une diode + une PR de ref **-> Ajout de la PR de ref qui est la mesure de luminosité ambiante de référence sous l’eau.** **But : **Elle permet de fixer une valeur seuil qui définit la luminosité sous l’eau pour pouvoir analyser les données par la suite : \- permet de savoir si c’est la nuit ou le jour - permet de savoir que faible luminosité est due à une mauvaise météo ### **Séance 1 (30 Janv) : ** **[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/CSyimage.png)Compréhension approfondie du projet avec notre responsable de projet et découverte de ARDUINO et premier montage.****La photorésistance (LDR) fonctionne en diminuant sa résistance électrique proportionnellement à l'intensité lumineuse qu'elle reçoit : + de lumière - de résistance = plus le courant circule // - de lumière = = de résistance = courant limité.**
**Quel seuil optimal définir pour les photorésistances de notre capteur afin d'assurer une bonne détection de la lumière dans l'eau ?**
### **Séance 2 (6 Fev) : ** #### **[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/CSyimage.png)** - **Séance lecteur intelligent :** nous nous sommes lors de cette séance familiarisé avec le Serial Monitor. - **Expérience :** lire les données de notre LDR.**Pour avoir les valeurs lu par analogRead() il faut ouvrir le Serial Monitor**
### **Séance 3 (13 Fev) : ****Les LDRs sont branchés en analog in (A0,A1,...) : LDR donne une tension variable entre 0 et 5V. Les broches analogiques lisent ces tensions avec analogRead() et renvoient une valeur de 0 à 1023.**
**Les broches digitales ne lient que HIGH (1) ou LOW (0) : on branche les diodes dessus**
**Matériel utilisé** **- ** Une carte Arduino. - Deux LED (diodes lumineuses) : LED 1 et LED 2. - Deux photorésistances (LDR) : LDR 1 et LDR 2. - Des résistances pour les LDR et les LED (100 Ω ). #### **** **[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/CSyimage.png)** - **Première expérience : **Nous avons essayé de programmer le montage pour que la LED 1 s’allume quand on cache la LDR 1, et que la LED 2 s’allume uniquement quand on cache en même temps la LDR 1 et la LDR 2.**Nous n'avons pas réussis la 1ère expérience, on l'a donc simplifié **
- **Deuxième expérience :** Nous avons simplifié le programme pour que, quand on cache la LDR 1, la LED 1 s’allume, et quand on cache la LDR 2, la LED 2 s’allume.**Nous n'avons pas réussis à faire marcher notre 2ème expérience.**
### **Séance 4 (20 Fev) : ****Résistances en fonction de la couleur des diodes : Vert = 10 kΩ ; Rouge = 1kΩ ; Bleu = 220 Ω **
**Objectif du montage 1 :** Ajouter un transistor NPN au circuit avec une seule LDR et une seule LEDIl faut deux transistors dans le circuit.
Il faut des résistances de 10Ω avec les transistors
Problématique : Le nombre de capteurs LDRs dépasse le nombre d'entrées analogiques disponibles sur le microcontrôleur. Pour lire individuellement chaque capteur sans multiplier les câbles et les entrées, nous avons mis en place une stratégie de lecture alternée.
Nous avons structuré les capteurs en deux groupes distincts, sur deux bordes différentes. Chaque broche analogique de l'Arduino est reliée à deux LDRs (la LDR A du groupe 1 et la LDR A du groupe 2).
Pour éviter que les deux capteurs n'envoient leur signal simultanément sur la même broche, l'alimentation est envoyée sélectivement. Le but étant pour cela d’utiliser les transistors en tant que interrupteur. Pour visualiser l'expérience nous avons ajouté des LEDs.Contrainte technique : Le module RTC utilise le protocole de communication I2C, ce qui mobilise impérativement les broches A4 (SDA) et A5 (SCL) de l'Arduino.
-Impact sur le design : Ces broches ne sont plus disponibles pour la lecture analogique des LDR, ce qui confirme l'importance de notre stratégie de multiplexage sur les autres broches analogiques restantes.
**2. Correction Transistors** Lors des tests précédents, les transistors ne jouaient pas leur rôle d'interrupteurs électroniques.Le circuit a été revu pour s'assurer que le courant passe vraiment dans transistors. Ils servent désormais de verrous pour n'alimenter qu'une seule "borde" à la fois.
**3. Nouvelle architecture des bordes** Le système est désormais segmenté en trois unités fonctionnelles : - Borde de Référence : Regroupe les éléments centraux (Module RTC, LDR de référence pour calibrer la luminosité ambiante, transistor) - Borde 1 & 2 : Unités de mesure déportées comprenant chacune une LDR de mesure, sa résistance et son transistor de pilotage.**Le code ne marche pas**
**=>** Nous en avons déduit qu'il n'était pas possible de changer la variable **etatActuel **n'était pas modifiabledirectement dans les cases, car nous restons bloqués dans le 1er case.| **\#** | **Problème** | **Conséquence** |
| 1 | **Guillemets dans l'enum** : enum {"Verif\_RTC", "NUIT", ...} | Les états deviennent des chaînes de caractères au lieu d'identifiants → ne compile pas |
| 2 | **Guillemets dans les cases** : case "Verif\_RTC" : | Le switch ne peut pas comparer des chaînes → transitions impossibles |
| 3 | **Variables déclarées sans { } dans les case** | Erreur de compilation *"crosses initialization"* |
| 4 | **Accolade } manquante** dans le else de Test\_Bord\_2 | Les cas suivants (Erreur\_FATALE, default) deviennent imbriqués et invisibles pour le switch |
| 5 | **Accolade } en trop** à la fin du fichier | Structure du programme cassée |
| 6 | **enum incohérent** : contient Test\_LDR\_REF (inutilisé) mais pas Erreur\_FATALE (utilisé) | Le compilateur ne reconnaît pas Erreur\_FATALE |
| 7 | **Variable valeurREF redéclarée** dans plusieurs cases sans isolation | Conflit de noms |
Code corriger ! **MAIS PAS TESTE**
Contraintes de design : La barrette doit épouser la forme courbe du tube (diamètre interne). Il faut prévoir des passages pour le câblage en dessous et créer des barrières opaques entre les LDR pour éviter qu’une lumière entrante ne fausse les détection de lumières des LDR qui sont encore dans le substrats.
Nouvelle approche de la FONCTION SWITCH/CASE
**Explication du code :** - On vérifie la RTC a chaque boucle À chaque cycle, on lit toutes les LDR de référence d'un coup selon celle qui capte de la lumière ou non on choisit directement le case dans lequel on va allerAzote = atm protectrice ( peut être à mettre dans le tube)
Le code pas encore testé
### **[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/CSyimage.png)** **2e objectif :** Faire la barette sur tinkercad [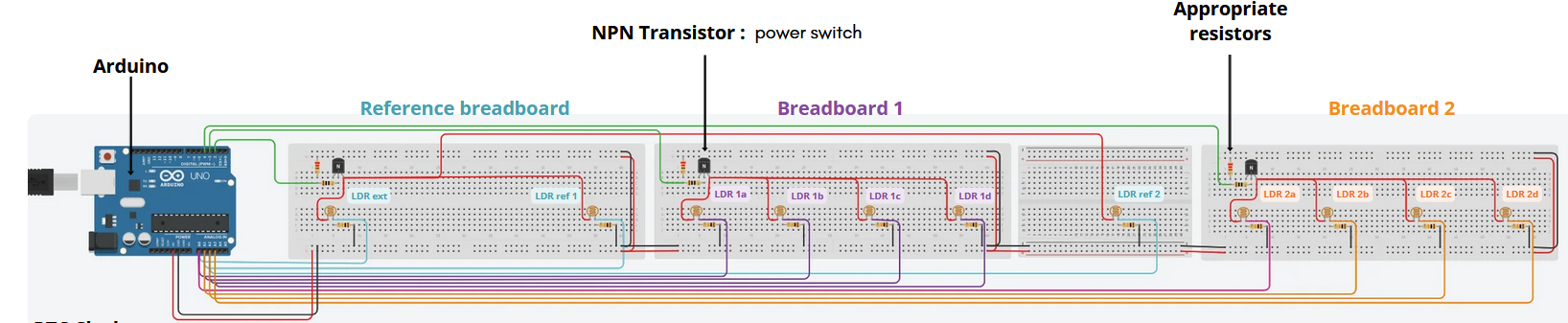](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/ltjimage.png) Lien d'accès https://www.tinkercad.com/things/bg5KvYUesNw-modelisation-du-circuit?sharecode=Q8lX\_LgqGzzxe0RfGgDLXN3qSim1PLlqWWHRYsVJsXc