Objectif : Imprimer une pièce en 3D capable de contenir de l'eau sans risque d'écoulement
Le plus parlant a été pour nous de choisir une pièce similaire à un bateau afin répondre à la problématique imposé qui était de réaliser une pièce étanche. Nous avons pris comme inspiration un modèle de bateau sur Thingiverse afin de réaliser un autre modèle personnel suivant cette inspiration. [](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/1710) ##### Fichier solidworks Nous avons utilisé le logiciel de modélisation 3D SolidWorks pour conceptualiser notre pièce. Voici le rendu final de cette modélisation. [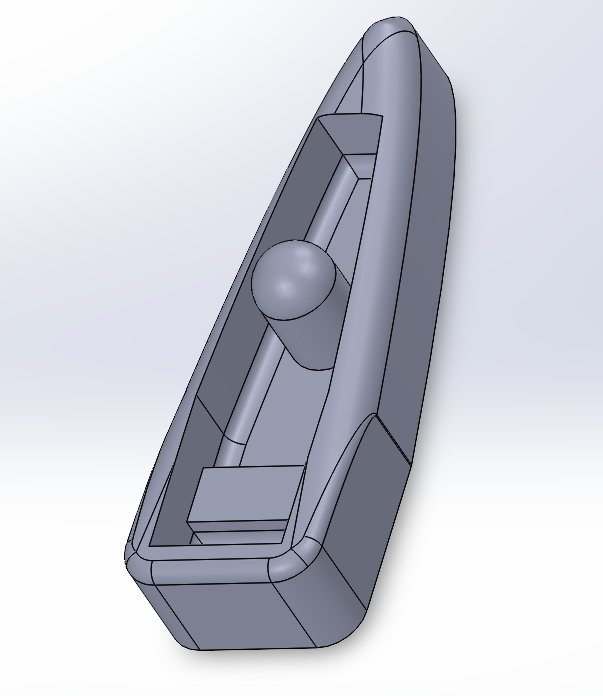](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/YcAimage.png) [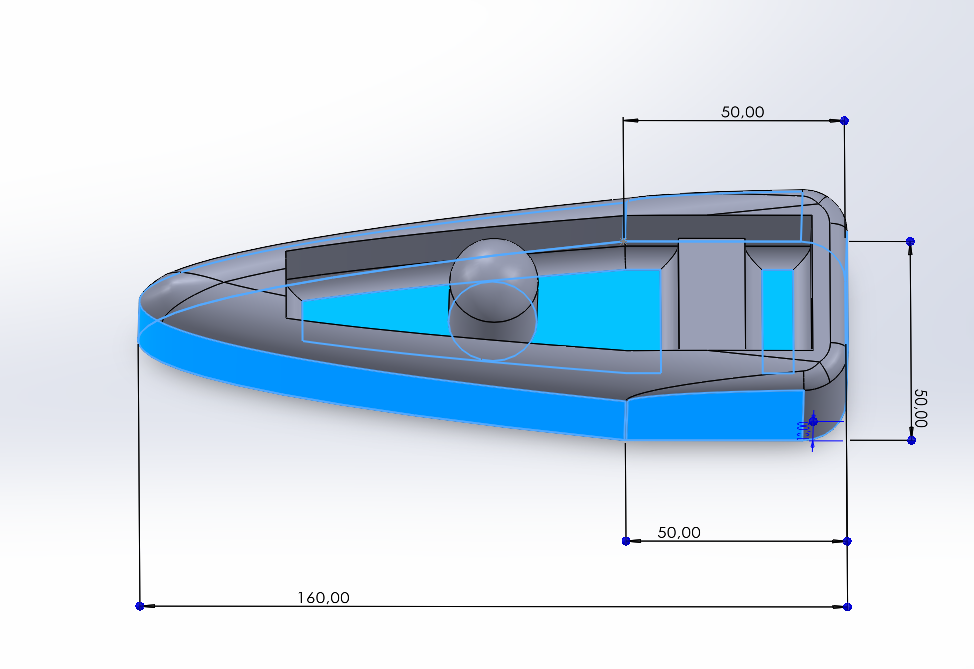](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/RDximage.png) ##### Conception Nous avons choisi de réaliser des parois assez épaisses pour la coque du bateau et le fond afin de pouvoir réaliser plusieurs couches lors du tranchage de l'objet et ainsi le rendre plus hermétique qu'avec seulement deux parois, ce qui est le réglage standard. Nous avons ensuite décidé d'ajouter le plus de congé possibles à l'intérieur du bateau afin d'avoir le moins d'arrêtes saillantes possibles, car ces dernières sont plus propices aux infiltrations. ##### Matériau Nous avons utilisé du PETG. Ce type de filament est intéressant à utiliser car il possède une bonne résistance à l'eau, il est solide et a une meilleure étanchéité comparée au PLA que nous avons utilisé lors de notre première impression. Celui-ci a également une excellente résistance aux chocs et à l'humidité, idéal pour un usage aquatique. ##### Tranchage \[Slicing\] Nous avons utilisé PrusaSlicer pour préparer le fichier G-code après avoir exporté notre fichier en STL depuis Solidworks. Les régalages que l'on a choisi sont les suivants :| **Paramètre** | **Valeur utilisée** | **Note technique** |
| **Hauteur de couche** | *0.2mm* | Une couche plus fine augmente la précision mais multiplie les risques de micro-fuites et le temps d'impression s'avère plus long. |
| **Périmètres (murs)** | 4 | Crucial pour l'étanchéité. Plus de murs empêchent l'eau de traverser et contre les micro-fuites. |
| **Température de la buse** | *250/255°C* | Assure une pièce plus solide et étanche imperméable à la pression de l'eau. |
| **Remplissage** | *20%* | Augmentation du remplissage pour l'étanchéité. |
Le conseil de l'équipe
Pensez aux congés pour l'impression ! # Conteneur sphérique étanche Membres : Paul CAMUS , Mathias DARIU Nous sommes des étudiants en M1 du parcours ROB de la mention automatique, robotique (AR) à Sorbonne Université. Dans le cadre de l'UE UM4RBM20, il nous a été demandé, afin de se familiariser avec l'impression 3D, de créer une pièce étanche. Nous avons décidé de nous diriger vers une sphère coupée en son milieu qui pourra se refermer à l'aide d'un filetage. Pour rendre notre objet vraiment étanche, nous rajouterons aussi un joint en silicone dans une gouttière entre les 2 parties de sphère une fois rassemblées pour s'assurer de l'étanchéité. Pour ce projet, nous avons décidé de tester 2 méthodes. #### **Méthode 1 : Filetage à plat** ##### **SolidWorks** Cette méthode est la plus simple car il suffit de construire une sphère et de la creuser par révolution avec une esquisse dans laquelle les parties plates feront offices de surface pour le filetage. [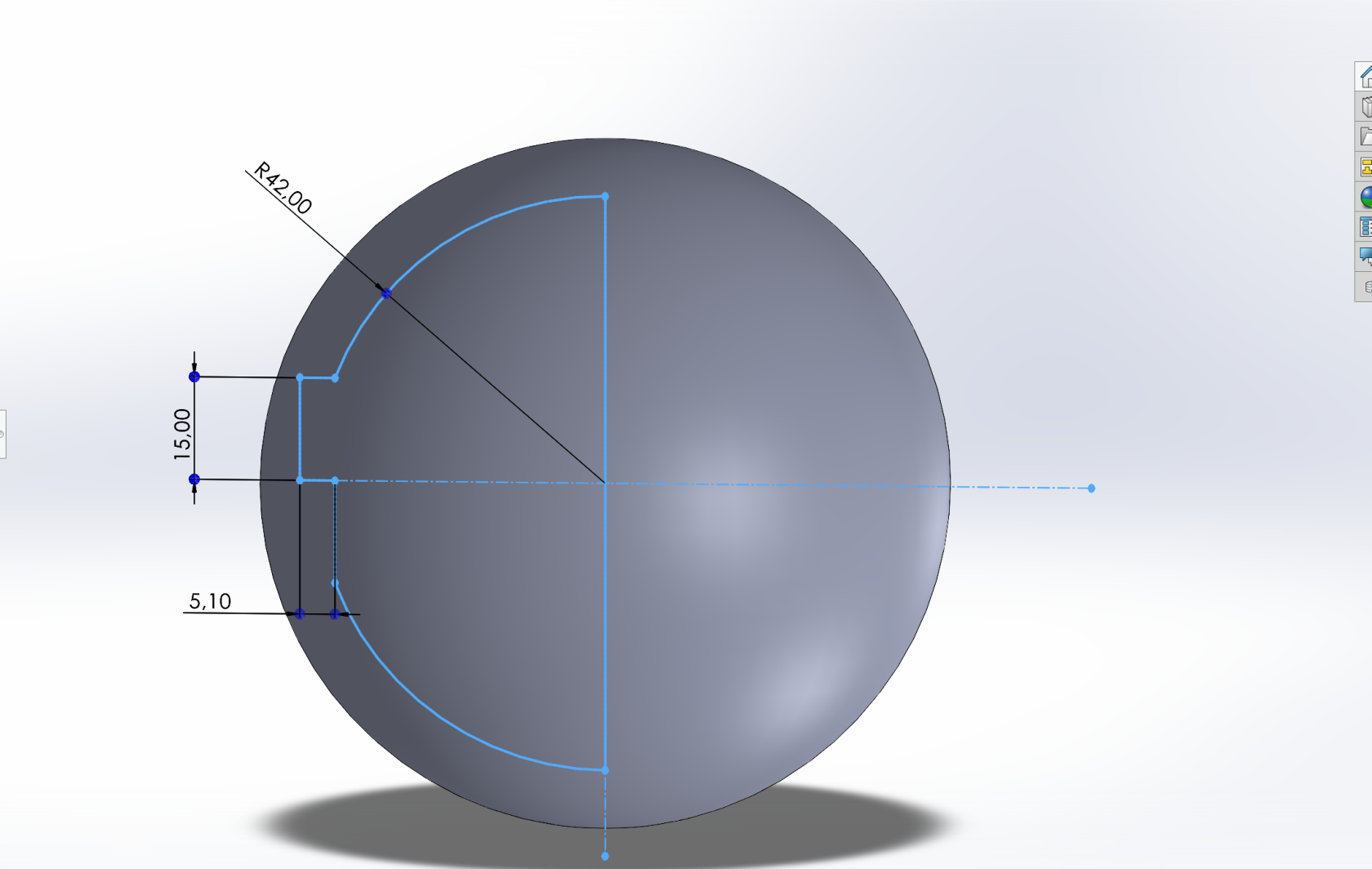](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/5hnimage.png) On rajoute ensuite des 2 côtés un filetage/taraudage M90x6.0 pour que ce ne soit pas trop fin pour l'impression. On pense aussi à décaler les entités de sorte à laisser 0.1mm de chaque côté. Enfin, on rajoute la gouttière plus petite que le joint cylindre de 1.8mm de diamètre pour qu'il puisse s'écraser et s'étaler correctement à l'intérieur de cette dernière. [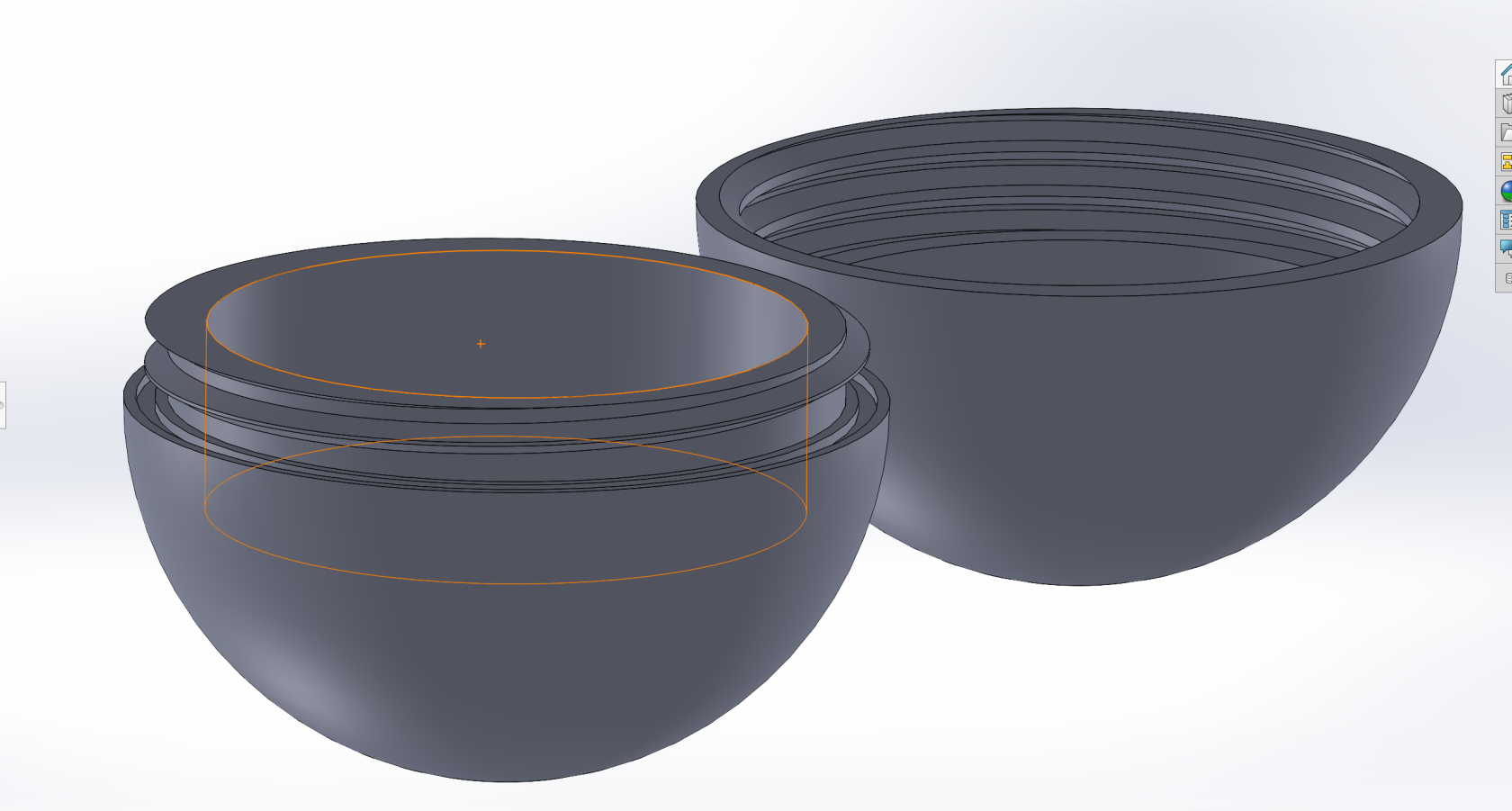](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/akJimage.png) ##### **PrusaSlicer** Le plus gros du travail est à faire sur ensuite sur le slicer pour assurer, d'une part, l'étanchéité et, d'autre part, le succès de l'impression notamment pour ce qui les filetages qui sont délicats à imprimer en 3D. Tout d'abord, nous avons fait le choix d'utiliser du PETG qui est meilleure en terme d'étanchéité. Ensuite, pour s'assurer que l'impression du taraudage soit un succès, nous avons diminuer la hauteur de couche au niveau de ce dernier et aussi à la base de la sphère pour avoir un rendu lisse, chose pas évidente avec une sphère. [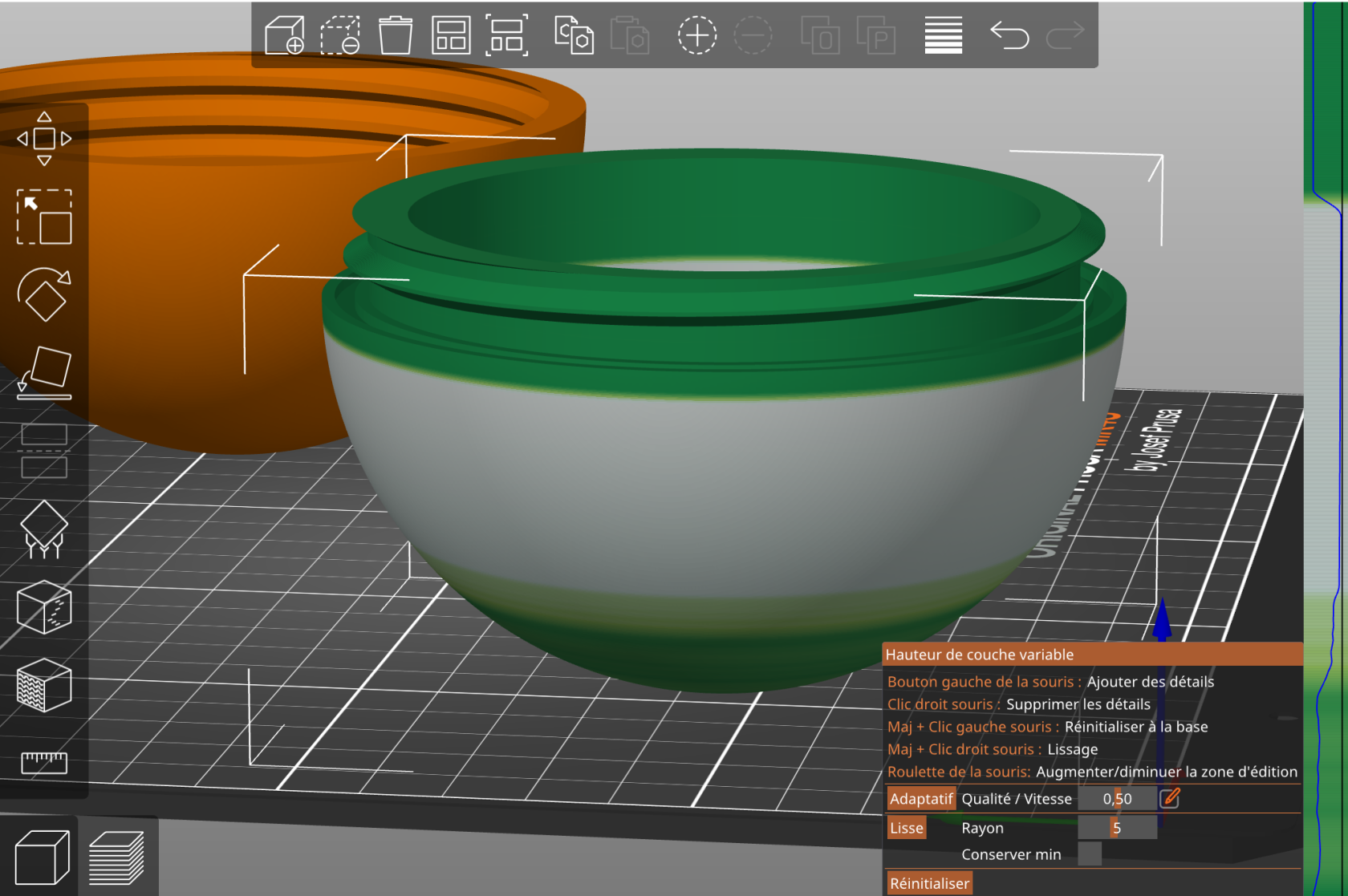](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/1z4image.png) Enfin, nous avons aussi fait en sorte que l'imprimante imprime chacune des demi-sphères une par une comme on peut le voir dans la visualisation des trajectoires de la buse sur la photo ci-dessous. Ce choix nous permet d'imprimer notre objet comme si nous étions sur 2 imprimantes différentes sans pour autant en monopoliser 2. [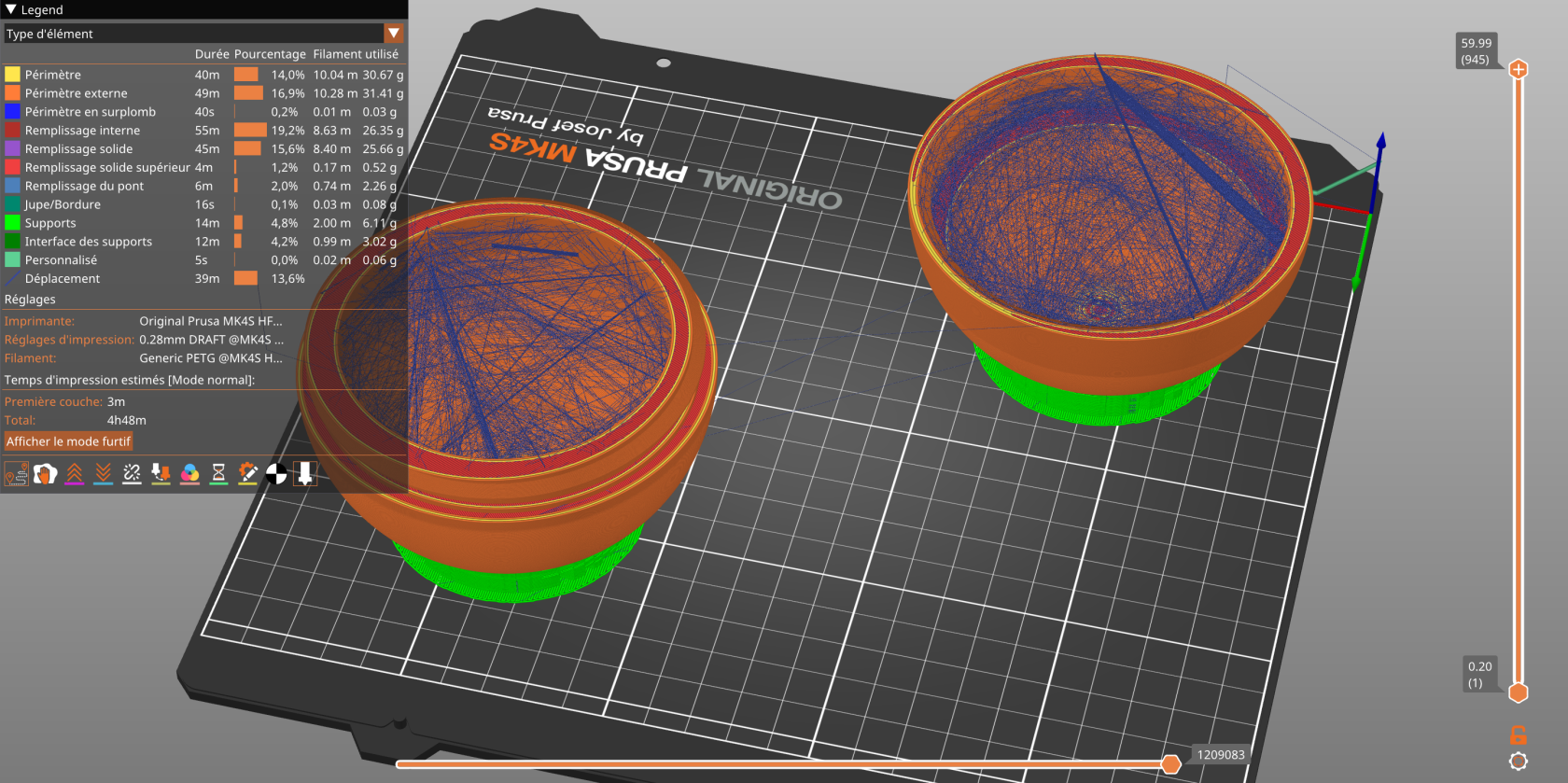](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/MoOimage.png) Il s'est avéré que l'impression a raté (2 fois) ... Pour une raison qui nous est inconnue, les 2 fois, après la création du support la base de la sphère commence puis se détache des supports (pourtant générés par le logiciel) provoquant ainsi une impression chaotique car en déposant le plastique chaud, la buse bouge la sphère. #### **Méthode 2 : Filetage incliné** # Sablier à Liquide Étanche Membres : Chloé SALAMEH, Clément MESPOUILLES Nous sommes des étudiants en M1 du parcours ROB de la mention automatique, robotique (AR) à Sorbonne Université. Dans le cadre de l'UE UM4RBM20, il nous a été demandé, afin de se familiariser avec l'impression 3D, de créer une pièce étanche. L'objectif de ce projet est de concevoir et fabriquer un sablier fonctionnant avec un liquide, entièrement imprimé en 3D. Cela a pour but de se pencher sur : 1. **L'assemblage :** Création de deux coques creuses et courbées s'emboîtant parfaitement via des piliers, intégrant un système d'entonnoir interne pour réguler l'écoulement du liquide lors du retournement. 2. **L'étanchéité :** Paramétrage spécifique de l'impression 3D et post-traitement pour empêcher toute fuite d'eau à travers les couches de plastique. #### Étape 1 : Modélisation CAO (SolidWorks) La conception du sablier repose sur deux moitiés qui viennent s'emboîter. - **Le mécanisme interne :** Un système d'entonnoir a été modélisé au centre pour éviter que le liquide ne se propage d'un coup lors du retournement. - **Le système d'emboîtement :** Des piliers viennent s'insérer dans des logements. - **Tolérance finale retenue :** Un jeu de **0,5 mm sur le diamètre** entre la partie mâle et femelle a été nécessaire pour permettre l'emboîtement tout en laissant la place aux surépaisseurs de l'impression. [ 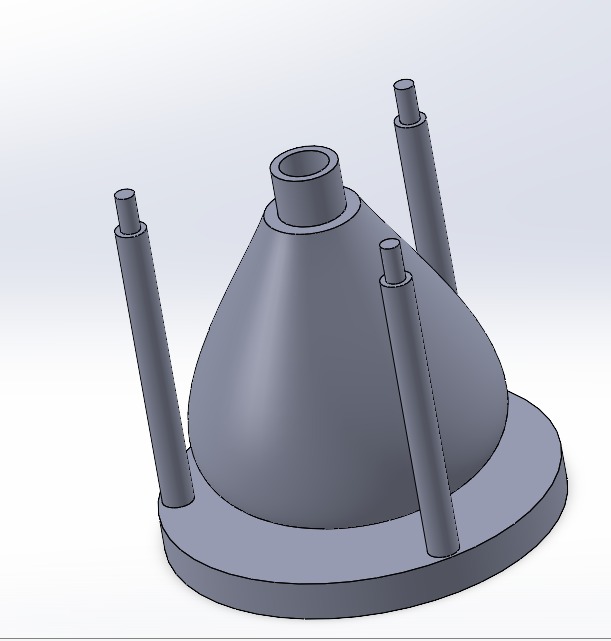](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/whatsapp-image-2026-03-31-at-20-43-25.jpeg)[ 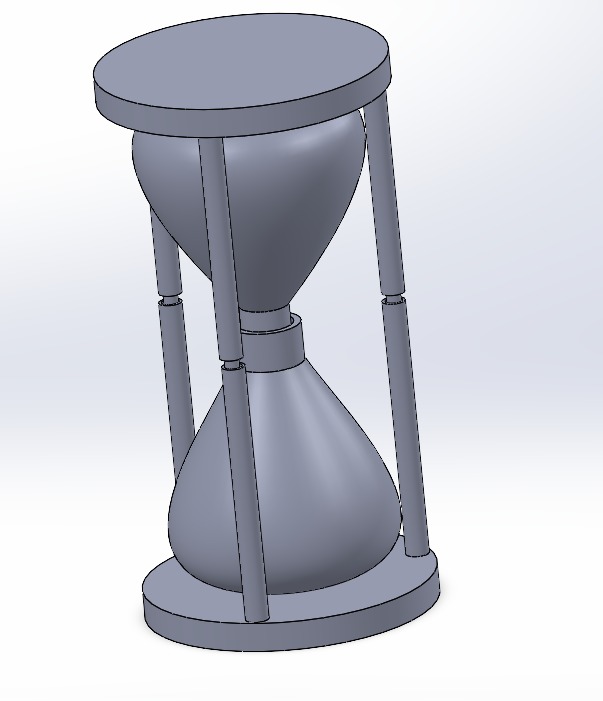](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/whatsapp-image-2026-03-31-at-20-54-28.jpeg) **Le mécanisme de régulation (entonnoir) :** Nous avons intégré un double entonnoir inversé à la jonction des deux réservoirs pour guider le liquide vers un canal central calibré, évitant un écoulement chaotique ou un blocage dû à la tension superficielle lors du retournement. [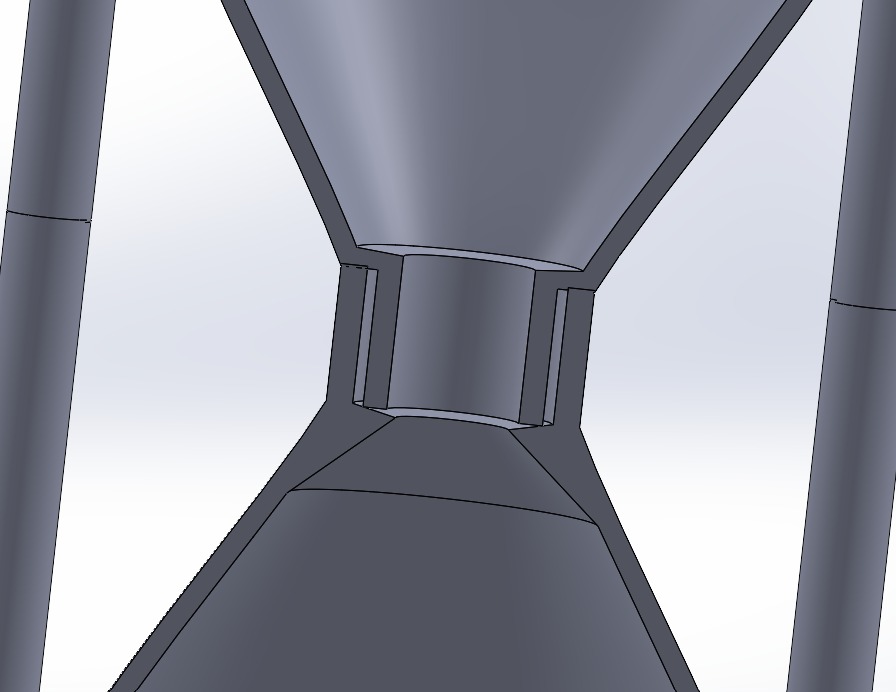](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/whatsapp-image-2026-03-26-at-23-08-43.jpeg) #### Étape 2 : Paramétrage du Slicer (PrusaSlicer) Le choix du filament s'est porté sur le **PETG au lieu du PLA**. En effet, le PETG offre une fusion beaucoup plus forte entre ses couches d'impression, ce qui le rend naturellement bien plus étanche et résistant à l'eau que le PLA. Cependant, pour rendre la pièce parfaitement étanche dès la sortie de l'imprimante, le profil par défaut ne suffit pas. L'eau trouve toujours son chemin. Voici les réglages appliqués sur le profil `0.20mm QUALITY` : - **Périmètres et couches pleines :** Augmentation à **4 ou 5 périmètres** (murs) et **5 à 6 couches pleines** en haut et en bas. Plus il y a de matière, plus le chemin de l'eau est bloqué. - **Multiplicateur d'extrusion (Flow Rate) :** Monté à **1.05**. Cette légère sur-extrusion permet d'écraser le plastique et de boucher la micro-porosité entre les lignes. - **Position de la couture :** Réglée sur **Aléatoire (Random)**. Une couture alignée crée une micro-fissure verticale propice aux fuites. [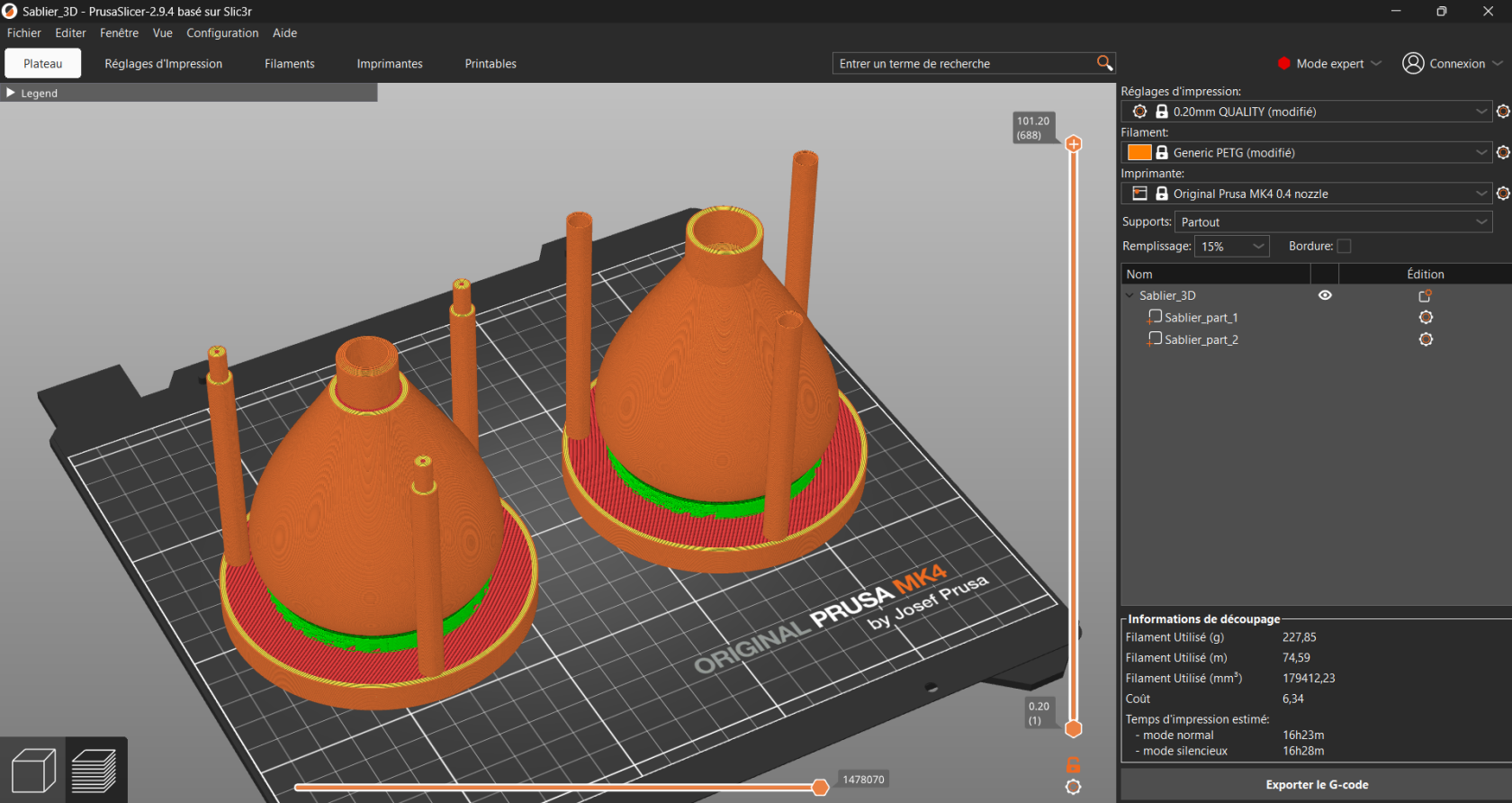](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/4g6image.png) #### Étape 3 : Résultat et Analyse L'impression a été réalisée en PETG en suivant les paramètres d'étanchéité optimisés. - **Étanchéité et qualité** : Le choix du PETG, avec un Flow Rate de 1.05, a donné des parois très lisse, signe d'une excellente fusion inter-couches. Les tests sur la partie inférieure de la pièce ont confirmé une étanchéité parfaite, validant notre stratégie de tranchage (slicing). - **Limites de notre projet** : Un manque de matière en fin de bobine a provoqué l'arrêt prématuré de l'imprimante avant la finalisation des couches supérieures. Nous n'avons donc pas pu tester physiquement l'emboîtement final des deux parties et la robustesse des piliers de jonction. [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/pieces-sablier.jpg) En superposant simplement les pièces, on remarque tout de même que la forme obtenue est similaire à celle escomptée, ce qui peut donc être qualifié de visuellement réussi : [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/sablier.jpg) # Tapa Tupper Membres : Ines BOUIZEGARENE et Alba Mayi ACOSTA Parcours: Mention AR - Parcours MeDH / ERASMUS #### Contexte Dans le cadre de notre UE XAO et FabLab, nous avions pour exercice de réaliser une pièce étanche. Nous avons décidé de réaliser un tupperware miniature avec un couvercle flexible. #### Modèle 3D Nous avons modélisé notre boite de tupperware sur *Solidworks*. La boîte a deux pièces: un couvercle flexible et un bas rigide. Afin d'assurer au maximum que la fermeture de la boite soit étanche, les pièces s'emboîtent autour d'une bordure arrondie sur le couvercle et d'une rainure sur le bas. Toutes les arêtes internes du bas sont aussi arrondies à l'aide de congés afin que l'eau ne s'infiltre pas à travers les coins. [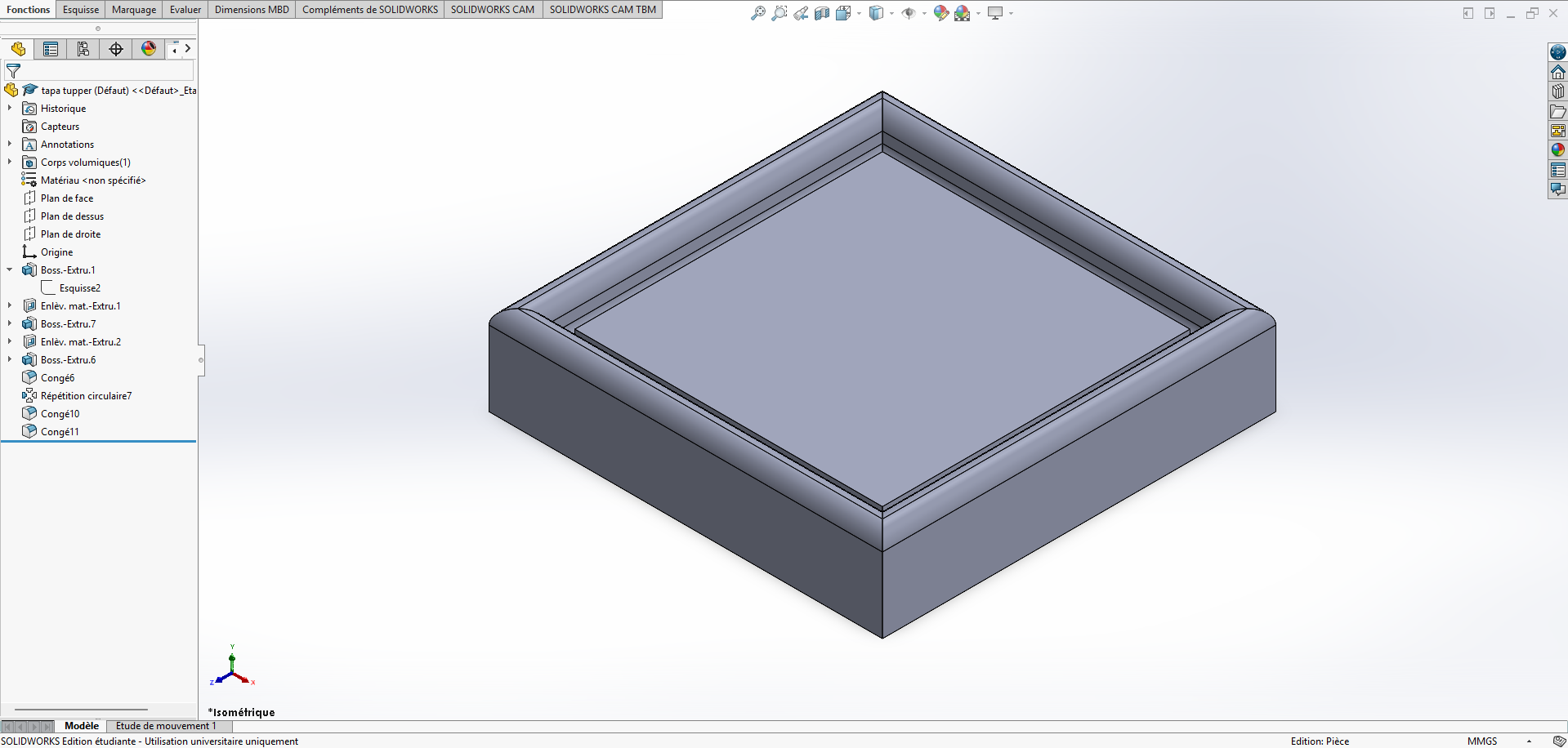](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/capture-decran-2026-03-30-230029.png) [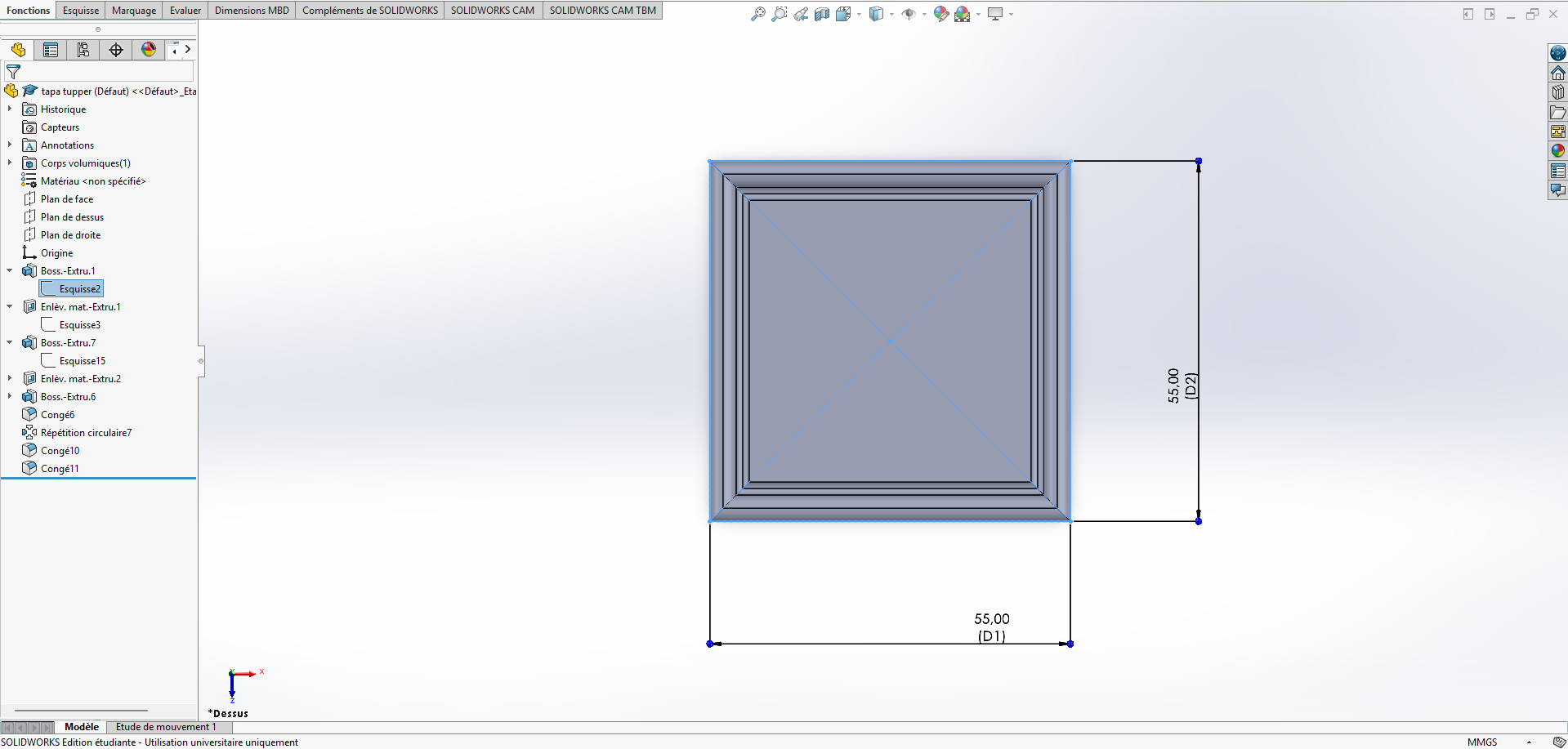](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/capture-decran-2026-03-30-230346.png)[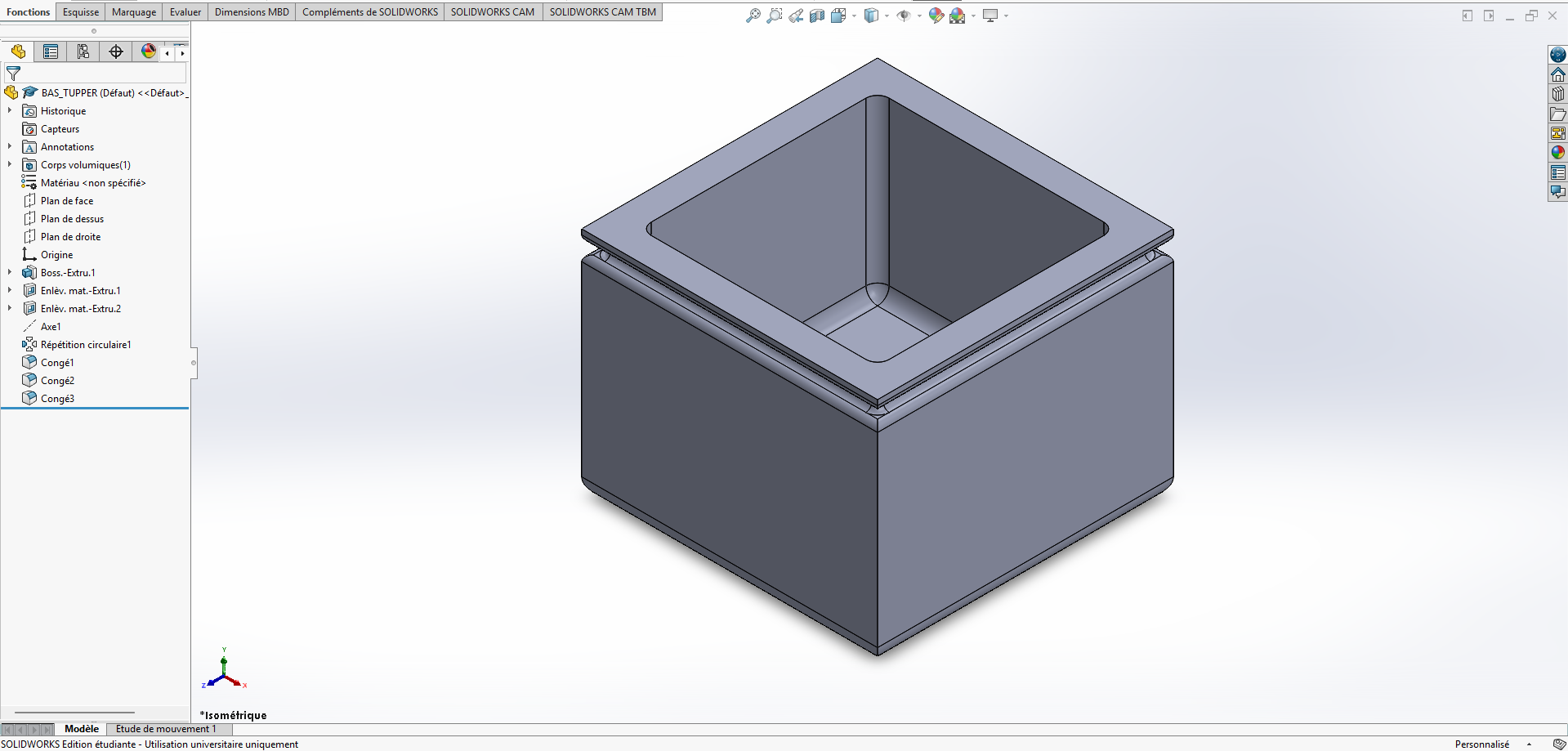](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/capture-decran-2026-03-30-225558.png)[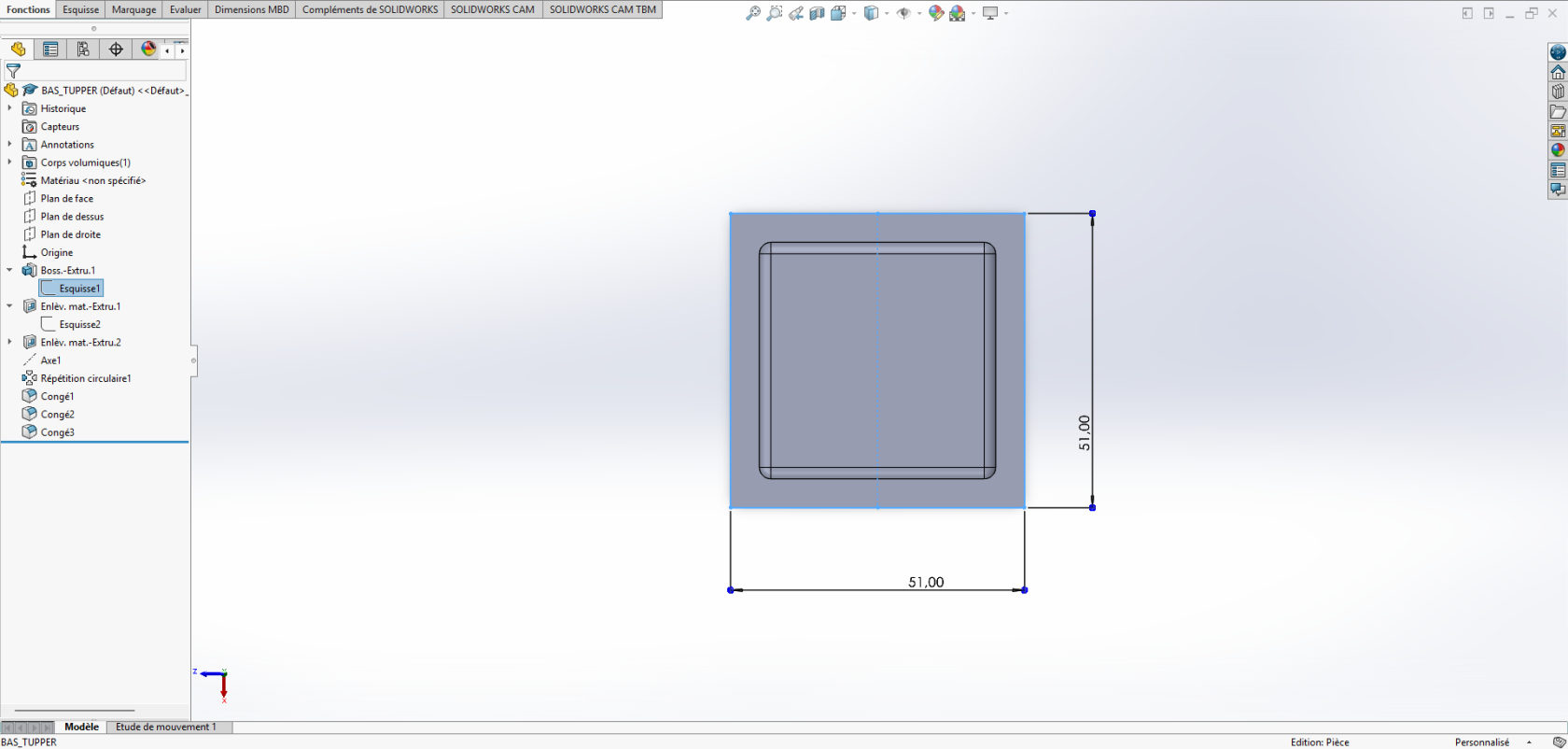](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/capture-decran-2026-03-30-230516.png) Les fichiers \*.STL de nos pièces peuvent être retrouvés en pièces jointes. #### *Slicing* et Impression ##### Bas de la boîte Nous avons réalisé le slicing sur PrusaSlicer pour le bas. Nous avons choisi d'utiliser du filament PETG comme recommandé durant notre cours. C'est un filament communément utilisé pour des pièces exposées à de l'eau (e.g. bouteille en plastique). Nous avons utilisé les imprimantes Prusa MK4S disponible au FabLab SU. Nous avons surtout joué sur la hauteur des couches, ce qui a fait que l'impression a pris plus longtemps.| **Paramètre** | **Valeur** | **Remarque** |
| Hauteur des couches | 0.1mm | Réduit les interstices entre les couches |
| Taille | 75mm x 75mm x 50 mm |
| Hauteur de couche | 0.2 mm |
| Filament | PLA |
| Nombre de couche | 5 |
| Remplissage | 20 % |
| Temps d'impression | 1h36m |
***Afin de répondre au besoin de créer un objet étanche à l’aide de l’impression 3D,** **nous avons décidé d’imprimer une mini poubelle.***
> ***Présentation du produit fini:*** > > [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/20260331171309-206-311.jpg)  ##### **Partie SolidWorks :** **La mini poubelle est composée de six éléments :** - Une tige de 60 mm de longueur et de 3 mm de diamètre ; - Une tige de 48 mm de longueur et de 2,5 mm de diamètre ; - Deux roues d’un diamètre total de 22 mm, d’une épaisseur de 5 mm, avec un trou central de 3 mm de diamètre ; - Le corps de la poubelle, modélisé avec une ouverture supérieure de 48 mm de longueur, 49,5 mm de largeur et 87,5 mm de hauteur, avec un évidement interne de 4 mm d’épaisseur des parois et un angle de dépouille de 2° vers le bas ; - Le couvercle, de dimensions 44 mm × 45,5 mm × 10 mm, relié au corps de la poubelle par une tige de 48 mm de longueur et de 2,5 mm de diamètre, fixée dans un trou de 3 mm de diamètre prolongé de 10 mm vers l’extérieur, permettant ainsi la rotation du couvercle. ##### [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/20260327005429-191-311.png)[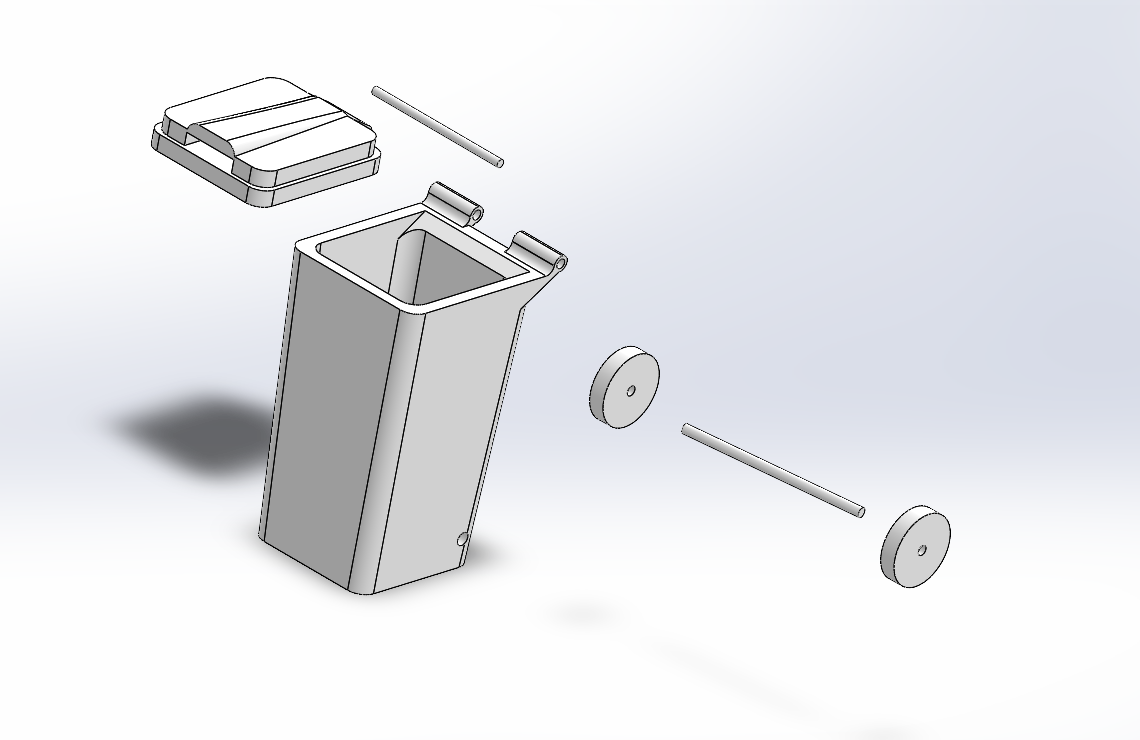](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/2026-03-31-171416.png) ##### **Partie PrusaSlicer:** Nous avons choisi d’utiliser l’imprimante MK4S et d’imprimer en matériau PLA. La densité de remplissage globale de la poubelle est de 15 %, mais nous avons augmenté celle des deux axes à 70 % afin d’améliorer leur rigidité et de réduire le risque de rupture. Par ailleurs, pour ces deux axes, nous avons ajouté un bordure de 5 mm lors de l’impression afin de garantir leur bonne adhérence au plateau d’impression.** ** [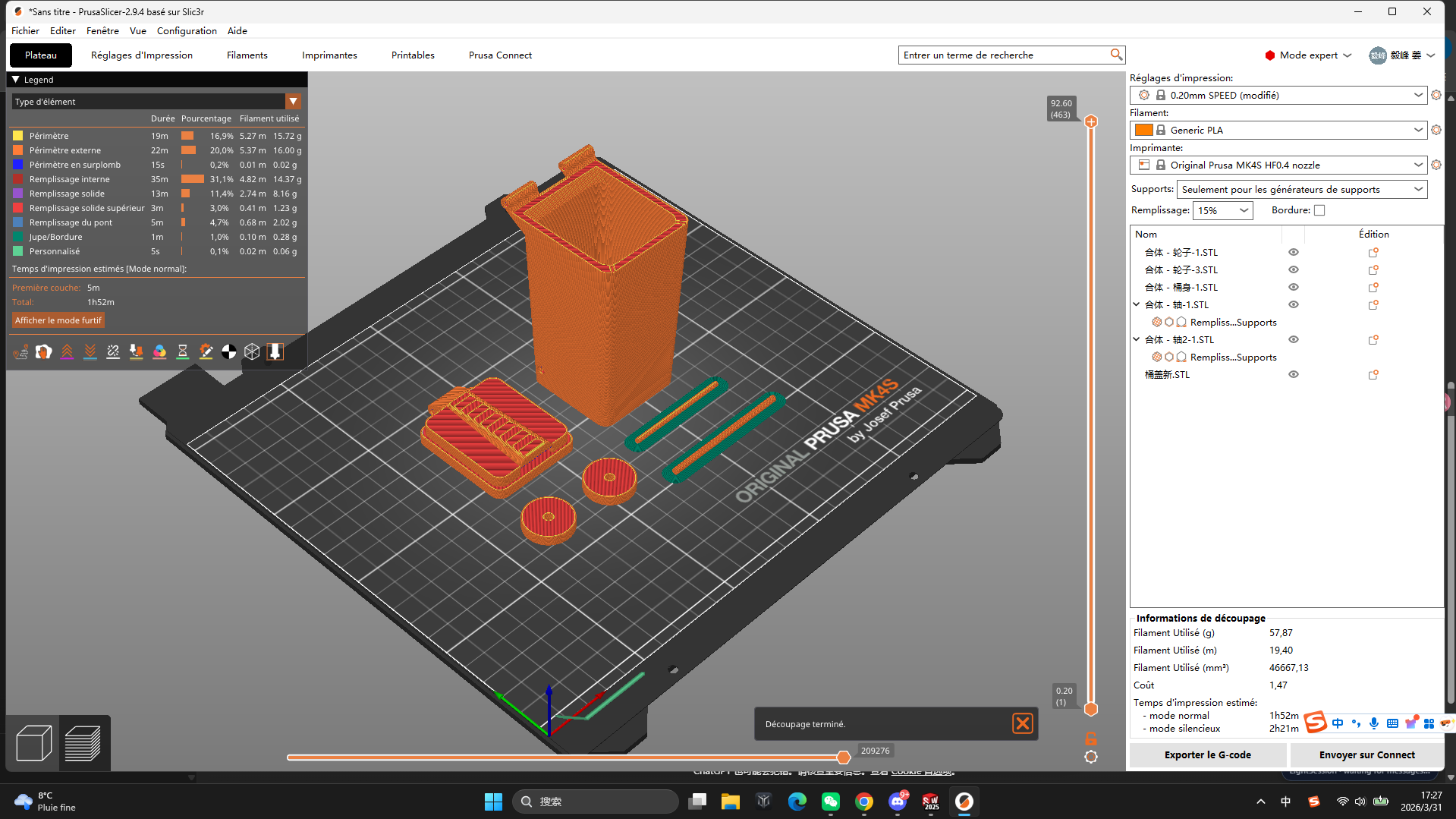](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-03/2026-03-31-172745.png) # Mascotte Rob Membres : Paul CAMUS , Mathias DARIU Nous sommes des étudiants en M1 du parcours ROB de la mention automatique, robotique (AR) à Sorbonne Université. Dans le cadre de l'UE UM4RBM20, il nous a été demandé, afin de se familiariser avec la découpe laser, de créer un objet à partir de la découpeuse. Nous avons décidé de faire un robot avec une grosse tête et un petit corps "goofy". Pour cela, nous avons utilisé ce [patron ](https://boxes.hackerspace-bamberg.de/IntegratedHingeBox?language=en)de coffre. Noté la fente rouge présente sur le dessous du coffre qui permettra l'introduction d'un morceau en forme de T pour permettre l'articulation goofy avec le corps du robot. [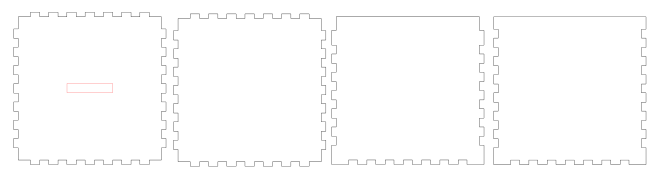](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-04/uM9image.png) [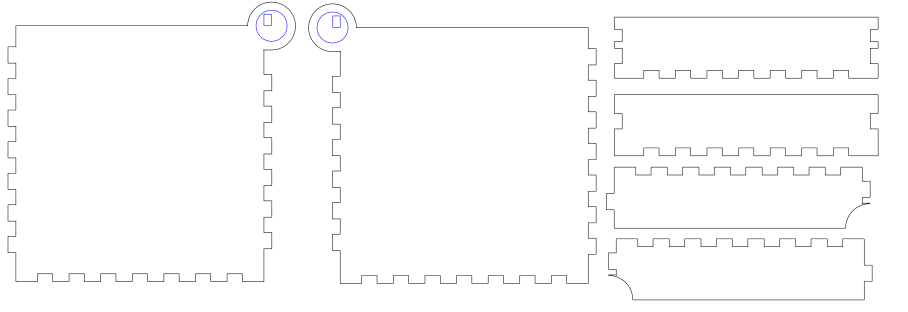](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-04/SB3image.png) Pour ce qui est du corps, le patron suivant a été utilisé. [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-04/cAScorps.svg) On peut remarquer plusieurs petites fente, une qui est utiliser pour connecter la tête au corps, et les autres pour permettre d'ajouter des bras et de jambes. Important de noter que le corps et x2 plus petit que la tête pour vraiment percevoir l'effet "goofy". Pour finaliser notre mascotte, l'image suivante et le patron (qui ma foi sont dessinés avec grande maîtrise) des jambes, bras ainsi que du connecteur entre la tête et le corps. [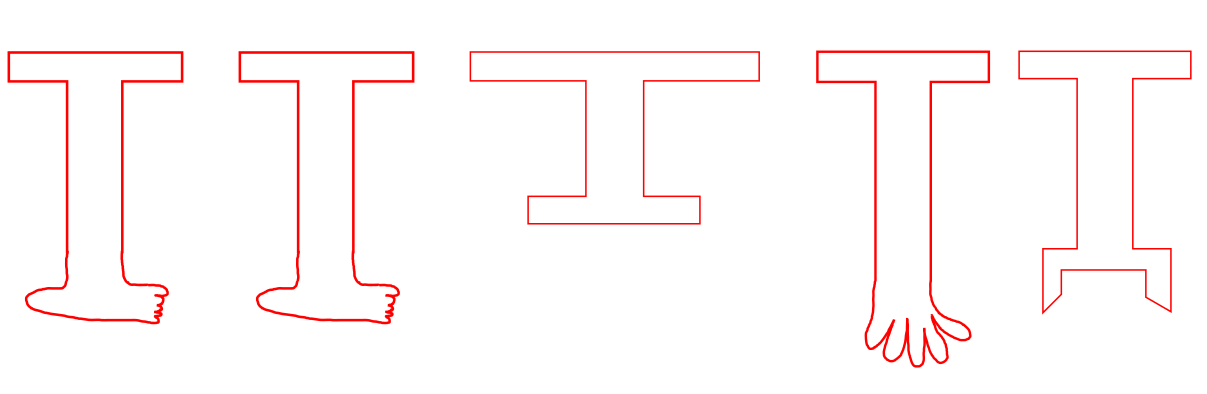](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-04/patron-connecteurs.png) On a donc, 2 jambes, 1 bras normal et 1 bras pincher. Le tout combiné, nous donne cette magnifique mascotte.[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-04/mascotte-rob-qui-flotte.jpg) [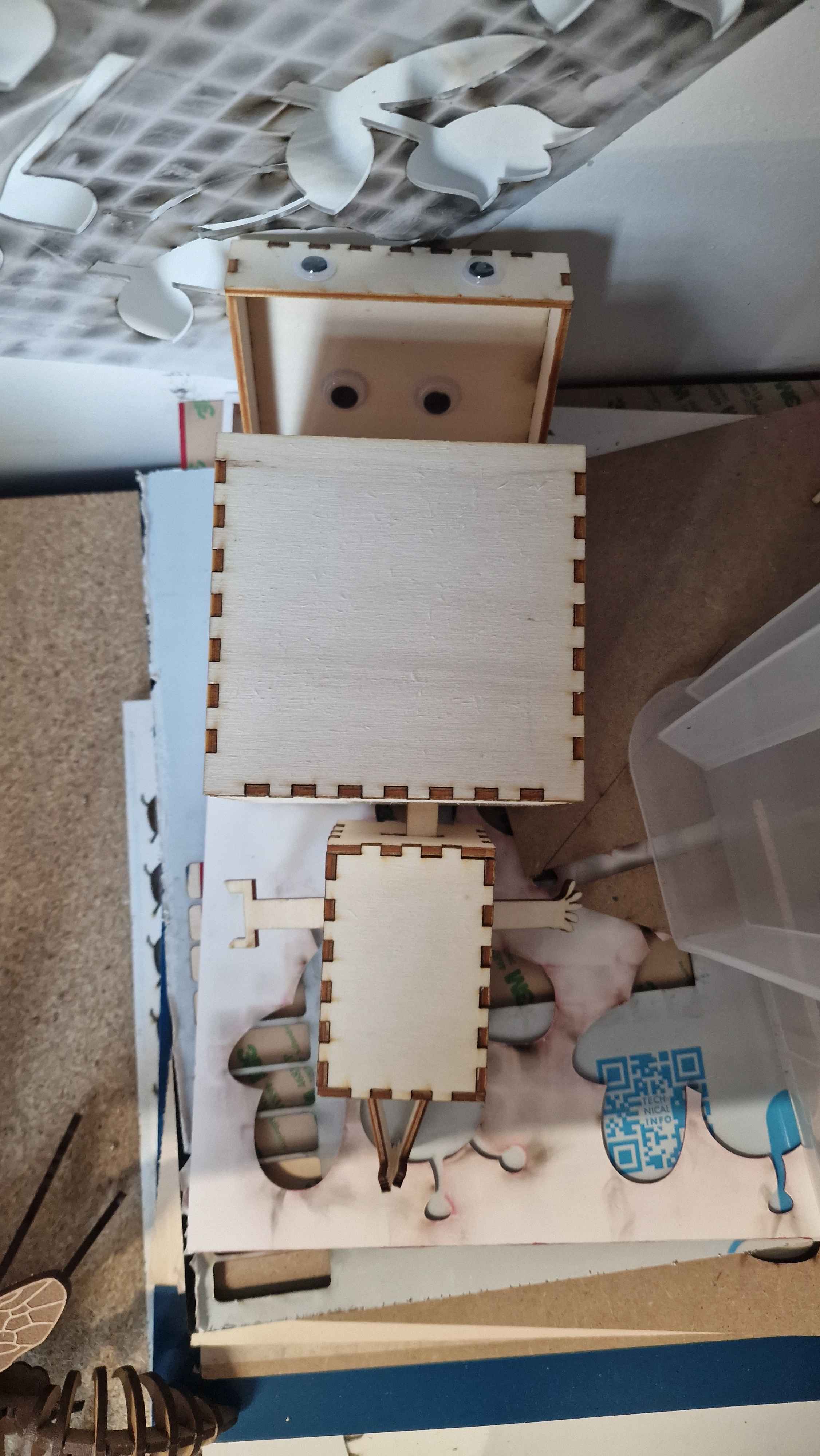](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-04/mascotte-rob-dechue.jpg) Important: Pour l'insertion des membres ainsi que du connecteur, il sera probablement nécessaire de légèrement couper l'un des coins supérieurs de façon à faciliter l’insertion. # PhoneHolder ### Informations - Indusan KUGATHASAN et Thierry Huang -Objectif : Imprimer au laser un ensemble emboitable
Le **joint d'Oldham** est un mécanisme de couplage, son but et de **relier 2 arbres rotatifs.** En d'autres termes, on transfert la rotation d'un arbre vers un autre. La particularité du joint d'Oldham est qu'il permet un accouplement entre deux arbres non coaxiaux.
[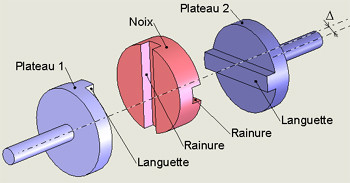](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-04/joint-oldham-strucuturez.jpg)[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-04/joint-oldham.gif) (Images et animation récupérés sur le site suivant : [https://turgotlimoges.scenari-community.org/STI2D/Ressources%20STI2D/TP\_WORKS%C2%A0/res/06\_transm\_transfo\_mvt.eWeb/export/visu156.html](https://turgotlimoges.scenari-community.org/STI2D/Ressources%20STI2D/TP_WORKS%C2%A0/res/06_transm_transfo_mvt.eWeb/export/visu156.html)) On peut remarquer sur l'animation de droite que nos 2 arbres ne sont **pas coaxiaux** et que le joint d'Oldham avec son mécanisme reliant **2 liaisons glissières,** permet de transférer la rotation du premier arbres vers le second tant que la distance entre les axes est petite. Ce système de couplage est notamment utilisé dans les cadres industriels. #### **Conception** Nous avons tout d'abord commencé par concevoir un modèle 3D de la pièce mécanique afin de s'assurer de son bon fonctionnement avec le design que l'on avait en tête. L'assemblage se composera des 2 pièces et du support présentés ci-dessous. [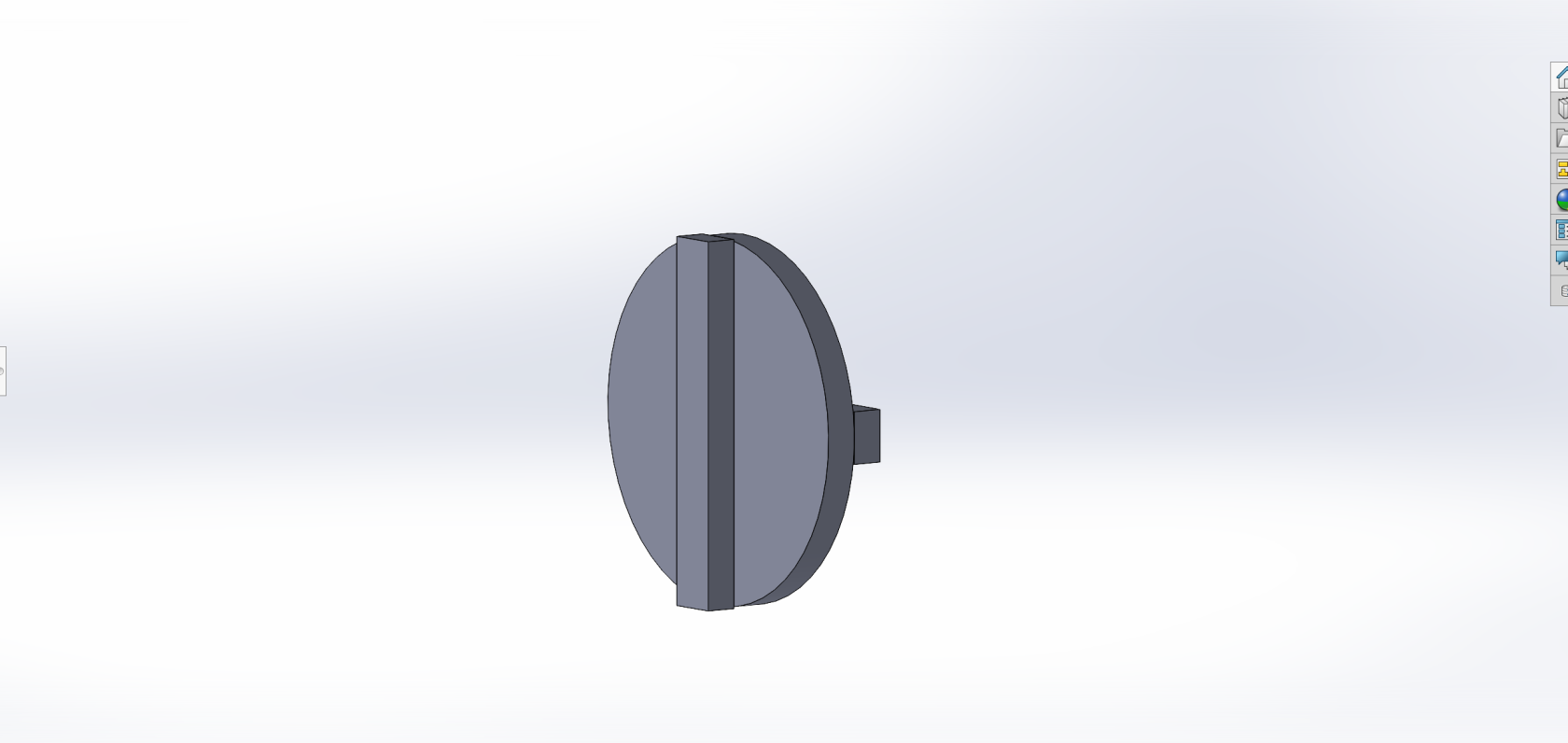](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/tyaimage.png)[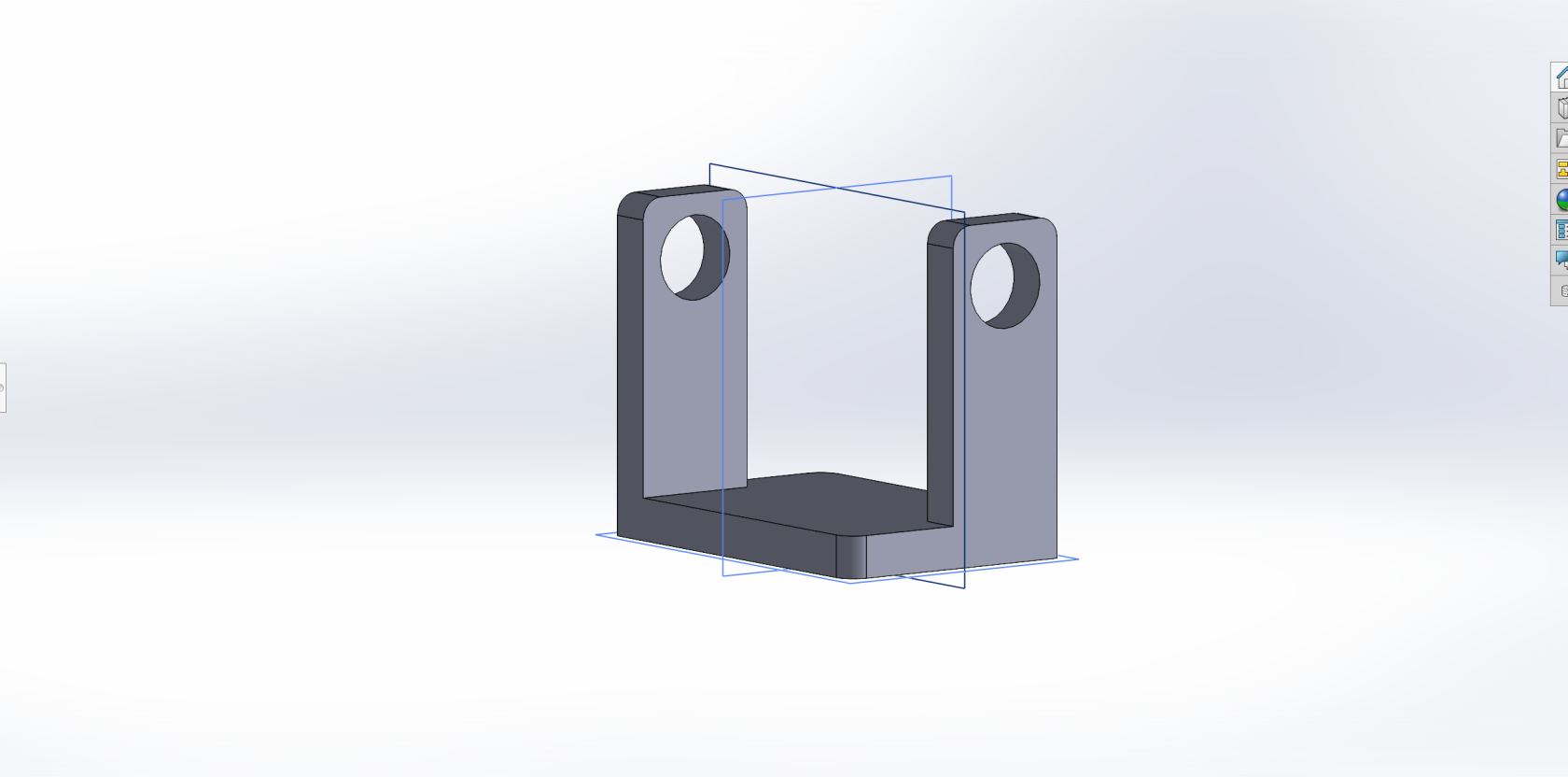](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/lngimage.png)[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/PHSimage.png)[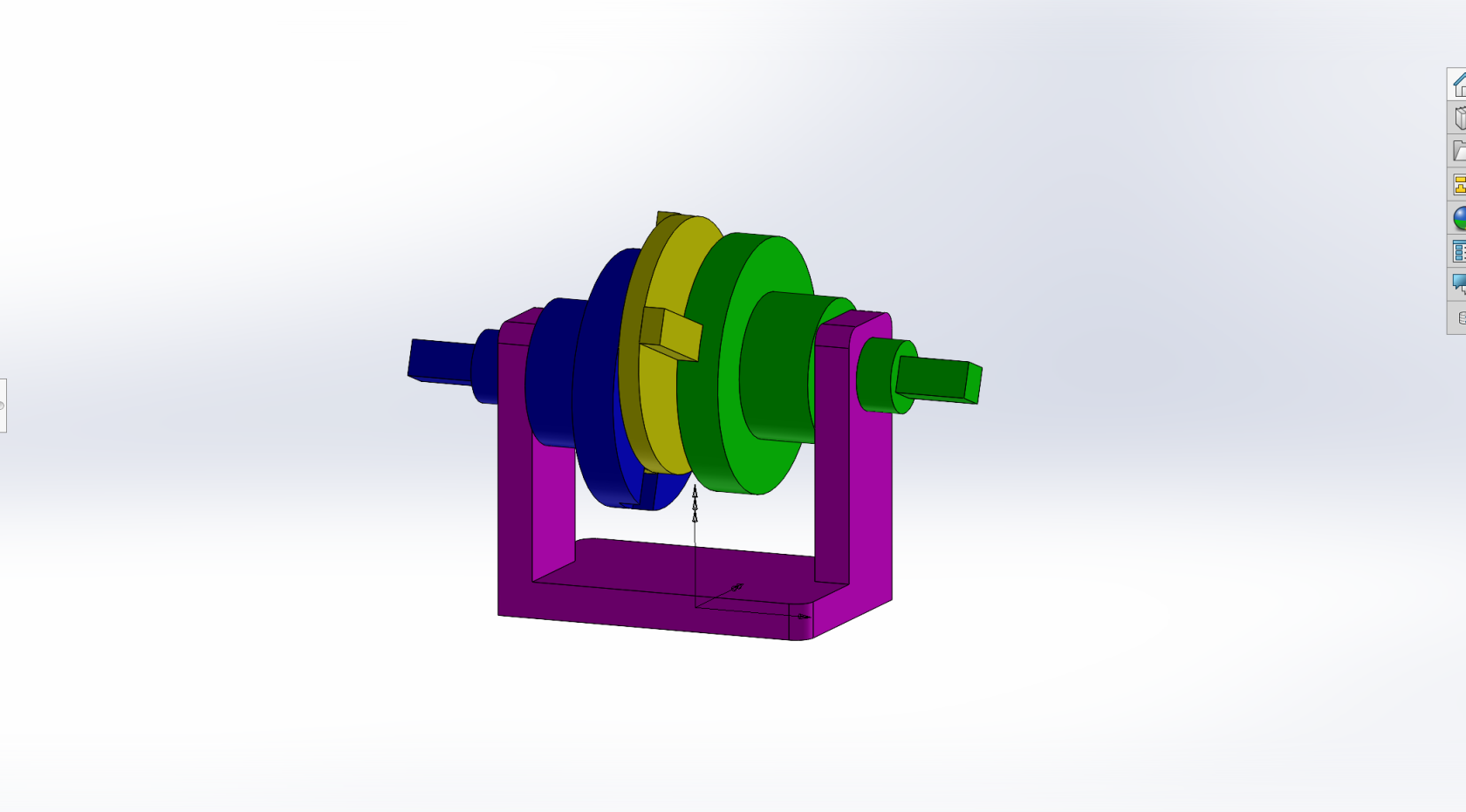](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/Xiuimage.png) Toutes ces pièces sont retrouvables en PJ de cette documentation. Grâce à l'assemblage de la figure en bas à droite, nous avons pu simuler la **mise en mouvement du mécanisme** en intégrant les **propriétés mécaniques du bois.** L'analyse ayant été excellente, nous avons décidé de confirmer notre projet. L'un des **avantages de la fraiseuse** pour réaliser ce joint est qu'il n'était pas nécessaire de réaliser un modèle 3D entier de la pièce mais uniquement les **motifs à creuser dans le bois** et **connaître les profondeurs de creusage**. Ainsi, les fichiers DXF [oldham\_centre.DXF](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/1782), [oldham\_extremite.DXF](https://wiki.fablab.sorbonne-universite.fr/BookStack/attachments/1783) trouvables en PJ de cette page sont relativement rudimentaires. En effet, la première pièce permet à la fois de faire les 2 plateaux et la noix et la seconde permet de faire les parties à supporter par les supports. Nous avons utilisé du contre-plaqué 30mm et les mesures de creusages suivantes :| Pièce | Plateau Droite | Plateau Gauche | Noix (partie 1) | Noix (partie 2) | Extrémité Droite | Extrémité Gauche | Repose support |
| Profondeur languette (en mm) | 15 | 15 | -15 | -15 | -15 | -15 | 2 |
**Cette dernière précision est primordiale pour assurer la bonne transmission, nous avons donc été très vigilent quant à la position des languettes lors du vissage !**
Malgré la simulation, nous avions des doutes quant aux **problèmes de frictions** que le matériau pourrait apporter à un tel mécanisme. Nous avons donc pris soin de **poncer scrupuleusement** les pièces et de **frotter les pièces entre elles** pour habituer le bois à ce mouvement et poncer encore un peu les parties importantes. ### **3. Les Supports** Nous avons fait le choix de les concevoir par **découpe laser** car il s'agit du moyen le plus **rapide et fiable**. Les fichiers DXF des 2 parties du support sont disponibles dans les PJ de la page, ainsi que les pièces de l'assemblage SolidWorks présentées ci-dessous. Nous avons utilisé du **MDF 6mm** qui est plus **rigide et compacte**, qualités dont nous avions besoin pour assurer que le support de **'tangue'** pas trop. Enfin, nous avons fait attention à bien prendre en compte le **diamètre du laser** en prenant une marge de **0.1mm** dans les trous de jointures des 2 pièces afin de réduire au maximum le jeu entre les 2 pièces. [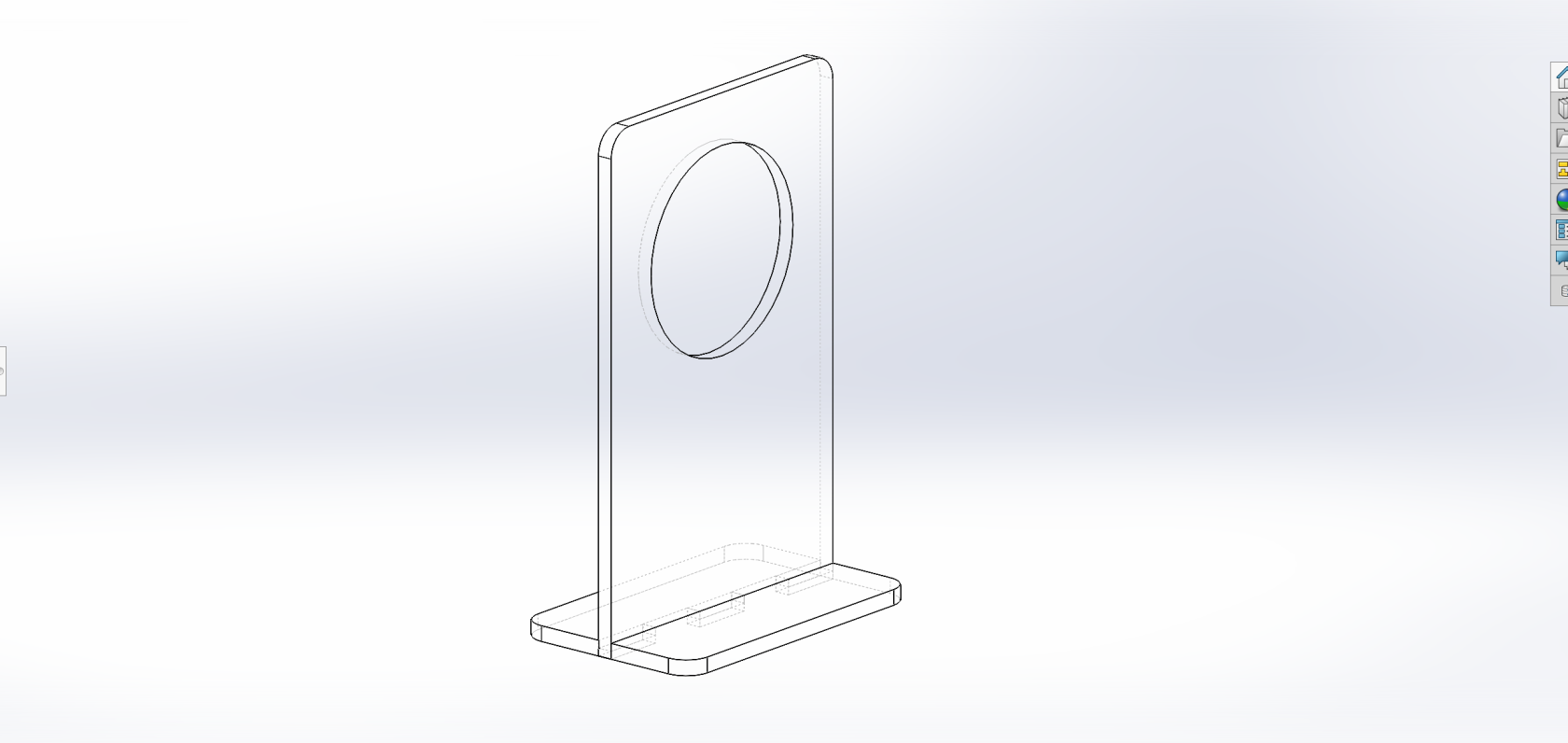](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/a3vimage.png) ### **3. La Manivelle** La manivelle à été conçue par **CAO** sur SolidWorks, puis imprimée en 3D. Le modèle de la manivelle est disponible aussi disponible dans les PJs de la page. La pièce a été imprimée de façon à ne pas utiliser de support (la partie plate sur le plateau de l'imprimante) et nous avons pris soin d'ajouter un **léger offset de 0.2mm** pour le trou qui connecte la manivelle à l'arbre pour **assurer la liaison.** [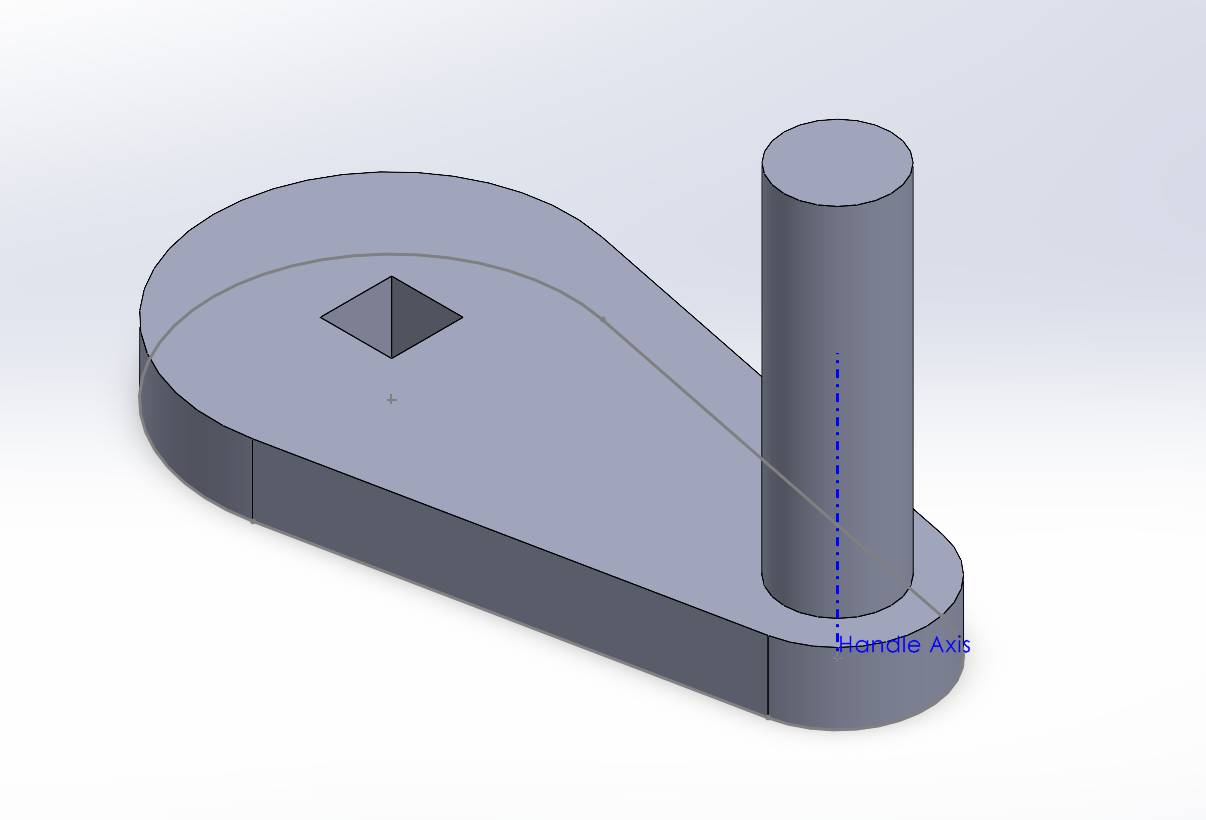](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/manivelle.png) ### **4. Montage Complet** [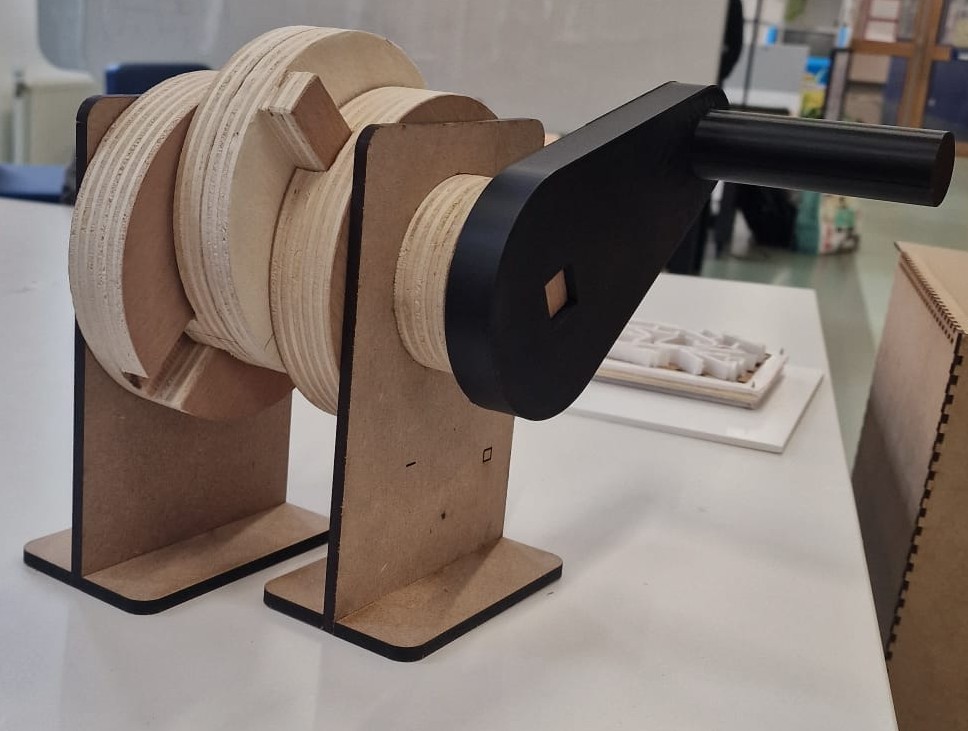](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/azwmontage.jpeg) Le mécanisme fonctionne correctement pour des écarts d'axe de rotation de l'ordre du centimètre. ### **5. Améliorations** #### **5.1 Les supports****Problème**
Nous voulions pouvoir **agir sur la distance entre les 2 axes de rotation** du mécanisme de manière simple, c'est pourquoi nous avons opté sur des supports détachés plutôt que des supports reliés comme nous l'avions imaginé lors de la conception du modèle 3D présenté plus haut. Néanmoins, cela apporte son lot de problème. Premièrement, **la stabilité**, en effet, comme les supports ne sont fixés à rien, lorsqu'on utilise le mécanisme tout bouge et cela perturbe son bon fonctionnement en décalant par exemple le parallélisme nécessaire des plateaux. Deuxièmement, **le moment fléchissant et le jeu avec la socle** de la partie verticale. En effet, le MDF 6mm est la plus grosse épaisseur que nous avions eu à disposition mais le fait est que lorsqu'on met en mouvement le mécanisme, il se tord et se balance légèrement ce qui gène beaucoup la transmission de la rotation.**Solutions**
##### **1) Pièce unique** Faire le compromis d'une distance entre les 2 axes de rotation fixe contre un gain énorme en stabilité en utilisant un socle commun pour les 2 supports. ##### **2) Impression 3D + Pièce unique** C'était l'idée d'origine afin de pouvoir choisir l'épaisseur des supports et ainsi contrôler le moment fléchissant de la partie verticale, mais comme expliqué plus bas, les problèmes logistiques des imprimantes 3D font que cela aurait été très contraignant pour nous surtout que les supports sont gros nécessitant donc un temps d'impression important. ##### **3) Socle multi-positions par fraisage** La dernière solution qui permettrait de garder la possibilité de changer l'écart entre les axes de rotation ET de réduire le moment fléchissant de la partie verticale serait de faire un gros socle avec plusieurs fentes pour pouvoir emboîter à différents endroits la partie verticale, elle aussi faite par fraisage pour gagner en épaisseur. #### **5.2 L'axe pour la manivelle****Problème**
Le carré de bois d'entraînement du mécanisme auquel nous sommes censés insérer la manivelle (voir image) s'est révélé être assez fragile après les tests de résistance d'un de nos camarades. En effet, nous avons utilisés du contre-plaqué mais les efforts appliqués sur cet axe sont parallèles à la superposition des couches de bois. Ainsi, si l'utilisateur force trop sur la manivelle, l'axe se désolidarise de la structure. [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/extremite.jpeg)**Solution**
La seule solution que nous pouvons envisager serait d'utiliser un autre type de matériau comme le métal. En effet, la pièce étant découpée par fraisage, il n'est pas possible de trouver un angle de découpe qui permettrait d'avoir les couches de bois perpendiculaires aux efforts. #### **5.3 Impression 3D****Problèmes**
A l'origine, nous devions réaliser les supports en impression 3D pour justement éviter le premier problème évoqué dans cette section mais la popularité et les délais d'attente de ces dernières étant tels, nous aurions eu du mal à respecter les délais de rendu de projet.**Solutions**
Nous avons donc opter pour la découpeuse laser quitte à devoir faire des compromis sur la stabilité de notre structure. #### **5.4 Taille de la manivelle****Problèmes**
La manivelle est légèrement disproportionée et nous sommes donc contraints de la tourner au bord d'une table sinon elle taperait contre cette dernière.**Solutions**
La solution est assez évidente, il faudrait réduire les dimensions de la manivelle. # Mélangeur de cartes **Membres** : MESPOUILLES Clément, SALAMEH Chloé ##### **Contexte** Dans le cadre de l'UE UM4RBM20, il nous a été demandé de concevoir et de fabriquer un système mécanique complet en utilisant au moins **deux machines distinctes** du Fablab. Ce projet nous permet de maîtriser différentes techniques de fabrication, d'anticiper les interactions entre des matériaux différents et gérer une chaîne de conception allant de la CAO jusqu'au montage final. ##### **Modèle** Le modèle choisit est un mélangeur de cartes à manivelle, qui combine la découpe laser pour les engrenages plats, et l'impression 3D pour les différentes pièces. [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/teLimage.png) [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/OZUimage.png)[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/xnAimage.png) Fonctionnement mécanique : - L'utilisateur actionne une manivelle manuelle, initiant une rotation, - Un système d'engrenages (train d'engrenages) distribue cette puissance vers deux axes de rotation distincts situés de chaque côté du dispositif, - Sous l'effet de la rotation, les deux axes/arbres entraînent les cartes situées dans deux compartiments latéraux (par friction), - Les cartes tombent au milieu, dans un tiroir qu'on a ajouté au modèle. ##### **Modélisation sur SolidWorks** La structure du mélangeur a été faite autour d'une architecture en "sandwich". Le châssis principal est constitué de deux grandes plaques latérales parallèles. Ces deux armatures servent de support externe pour la rotation du train d'engrenages, et de maintien interne pour tous les sous-ensembles du distributeur (bacs à cartes, rampes inclinées, tiroir de récupération). [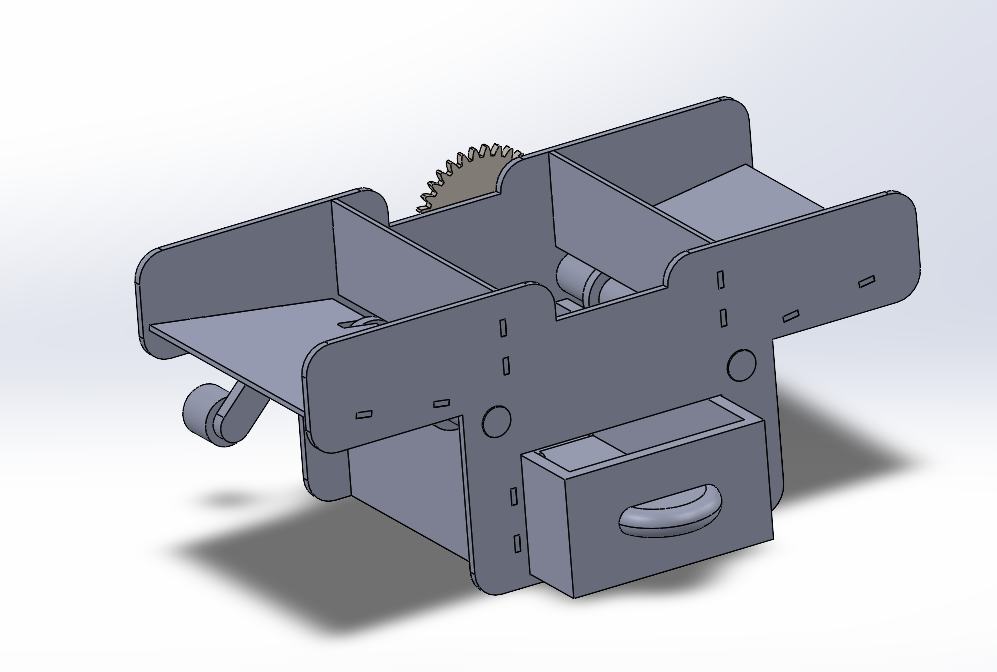](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/bu4image.png) **[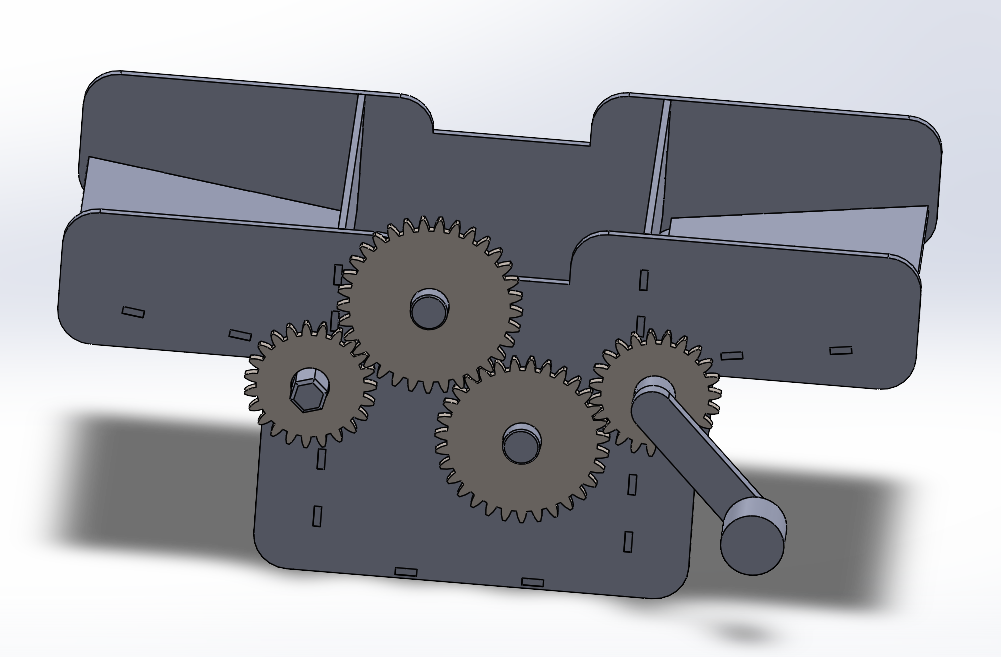](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/Cp8image.png)** **[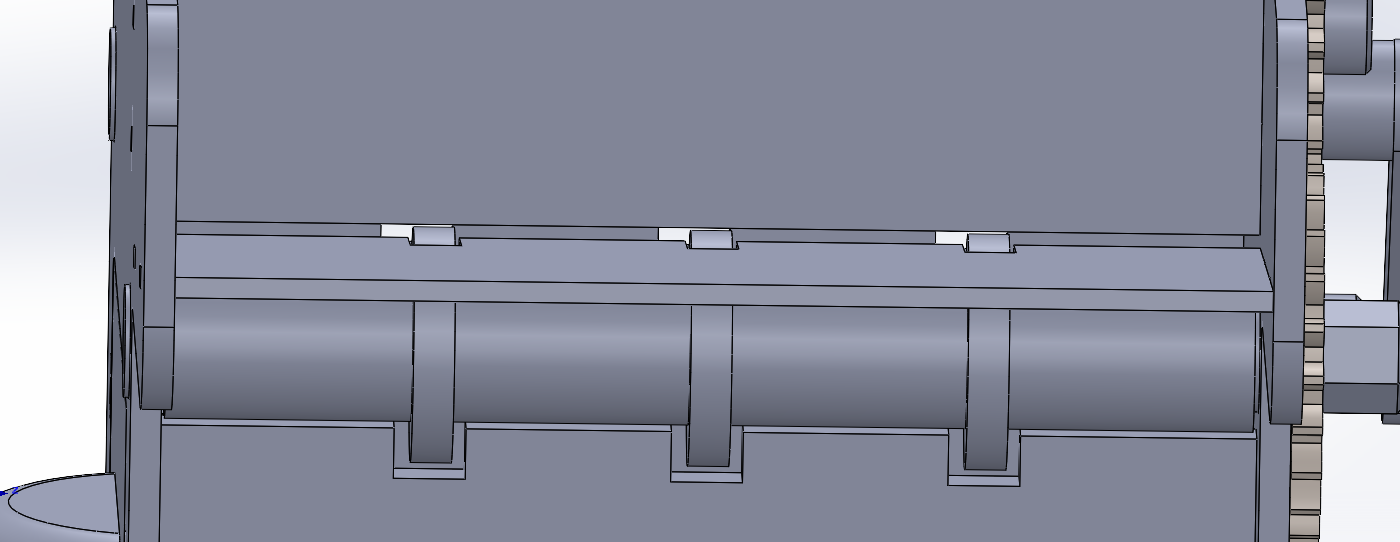](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/04Ximage.png)** **Méthode d'assemblage par emboîtement (Tenon-Mortaise)** : Pour relier les pièces internes aux deux plaques principales sans avoir recours à de la colle ou de la visserie, nous avons opté pour un assemblage mécanique par emboîtement. Des "pavés" (tenons rectangulaires) ont été modélisés aux extrémités de chaque pièce interne. Ces pavés viennent s'insérer dans des encoches (mortaises) traversant les deux grandes plaques latérales. Ce choix de modélisation présente plusieurs avantages, déjà lors du montage, les pièces trouvent naturellement leur position exacte. De plus les efforts mécaniques (notamment les vibrations liées à la manivelle) sont répartis sur les tranches des pièces et non sur des points de colle. [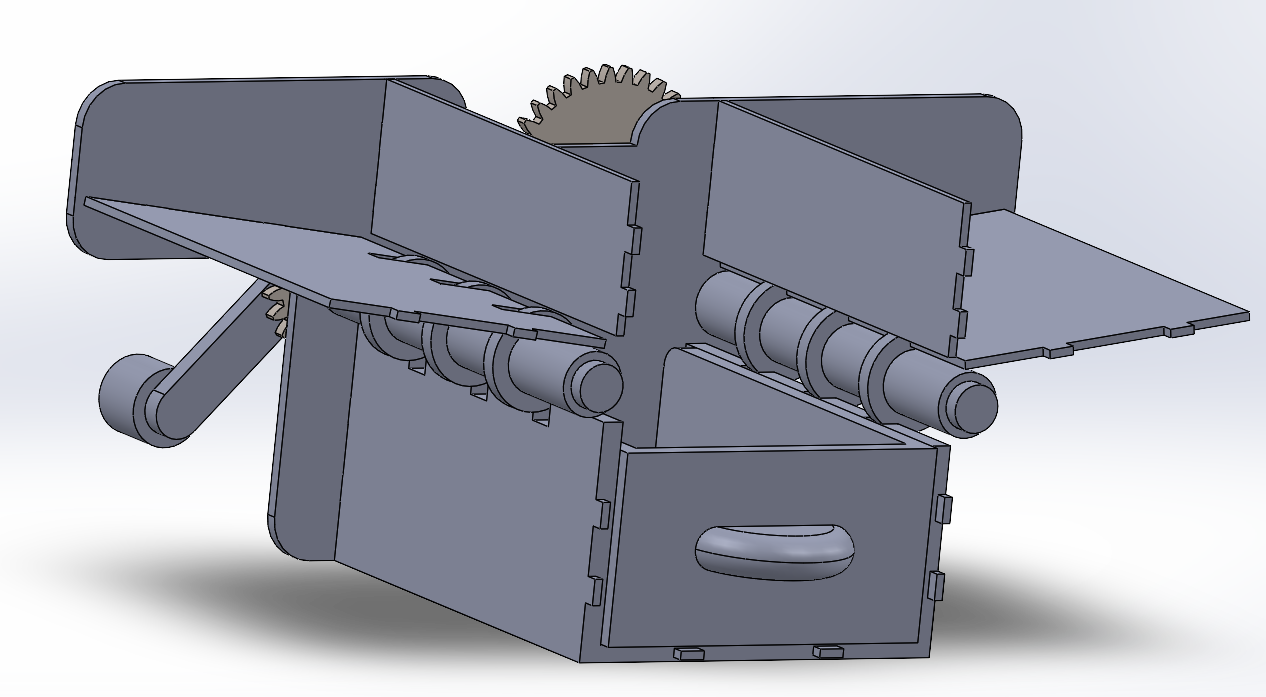](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/Y6Wimage.png)[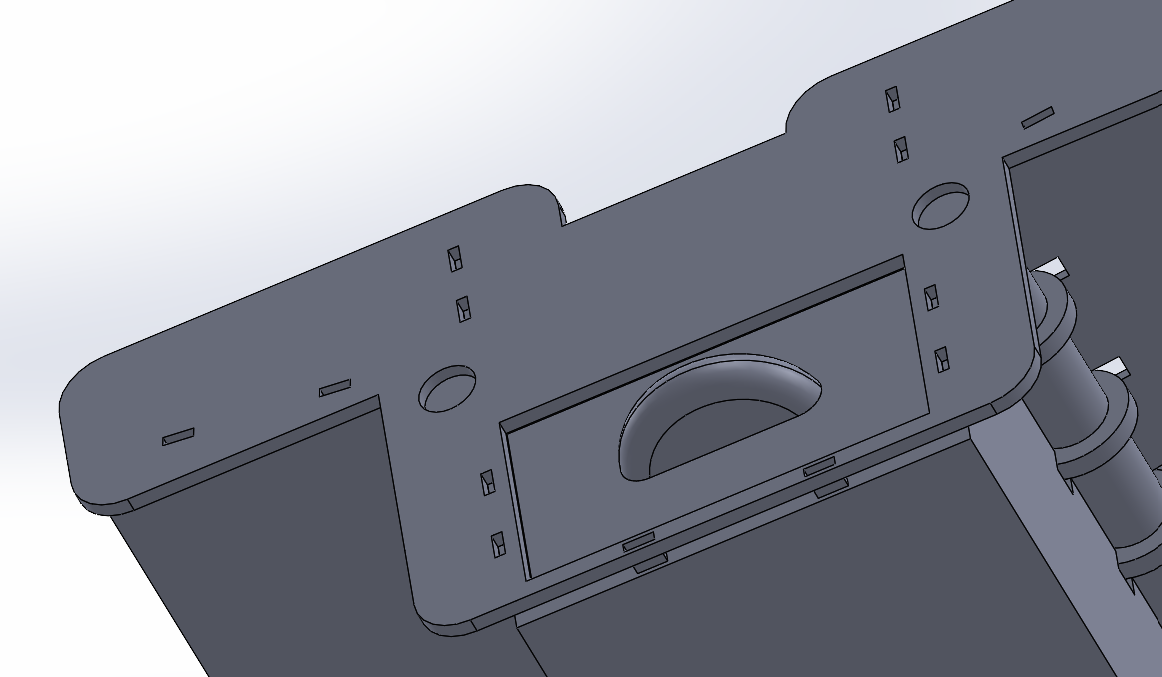](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/eMMimage.png) ##### **Tolérances géométriques et dimensionnelles** La combinaison de deux procédés de fabrication différents (l'impression 3D PLA et la découpe laser de contreplaqué) a nécessité des tolérances et des jeux fonctionnels pour chaque type de liaison. **1. Assemblage structurel (Impression 3D / Impression 3D) :** Pour l'emboîtement des tenons dans les mortaises de l'armature, nous avions prévu sur CAO une tolérance de **0.05 mm** sur chaque face (soit un jeu total de 0.2 mm) pour obtenir un assemblage théoriquement glissant et qui ne s'enlève pas facilement. Cependant, l'utilisation du profil d'impression "0.20mm SPEED" sur la Prusa MK4S a créé de légers renflements dans les angles des pièces en raison des accélérations de la tête d'impression, bien que ce réglage a été utilisé seulement sur les grandes pièces porteuses (avec les mortaises) et non sur les petites pour les tenons. En conséquence, le jeu théorique s'est transformé en un **ajustement serré**. - **Résultat pratique :** L'assemblage physique a nécessité l'utilisation d'un maillet pour insérer les tenons. Bien que non prévu initialement, ce serrage a rendu la structure finale extrêmement rigide et quasi définitive, supprimant tout jeu parasite qui aurait pu nuire à la distribution des cartes. [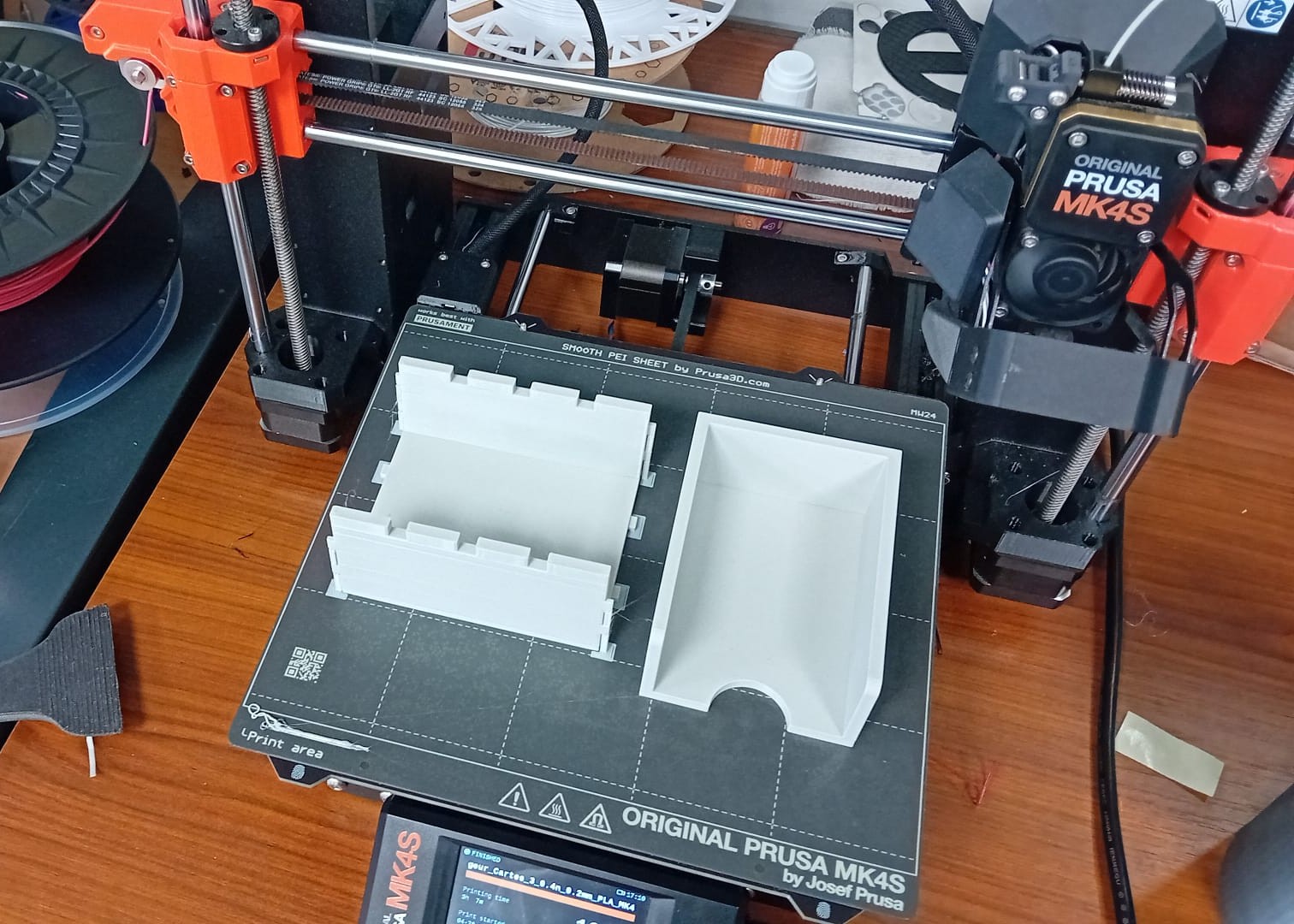 ](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/photo2.jpeg)[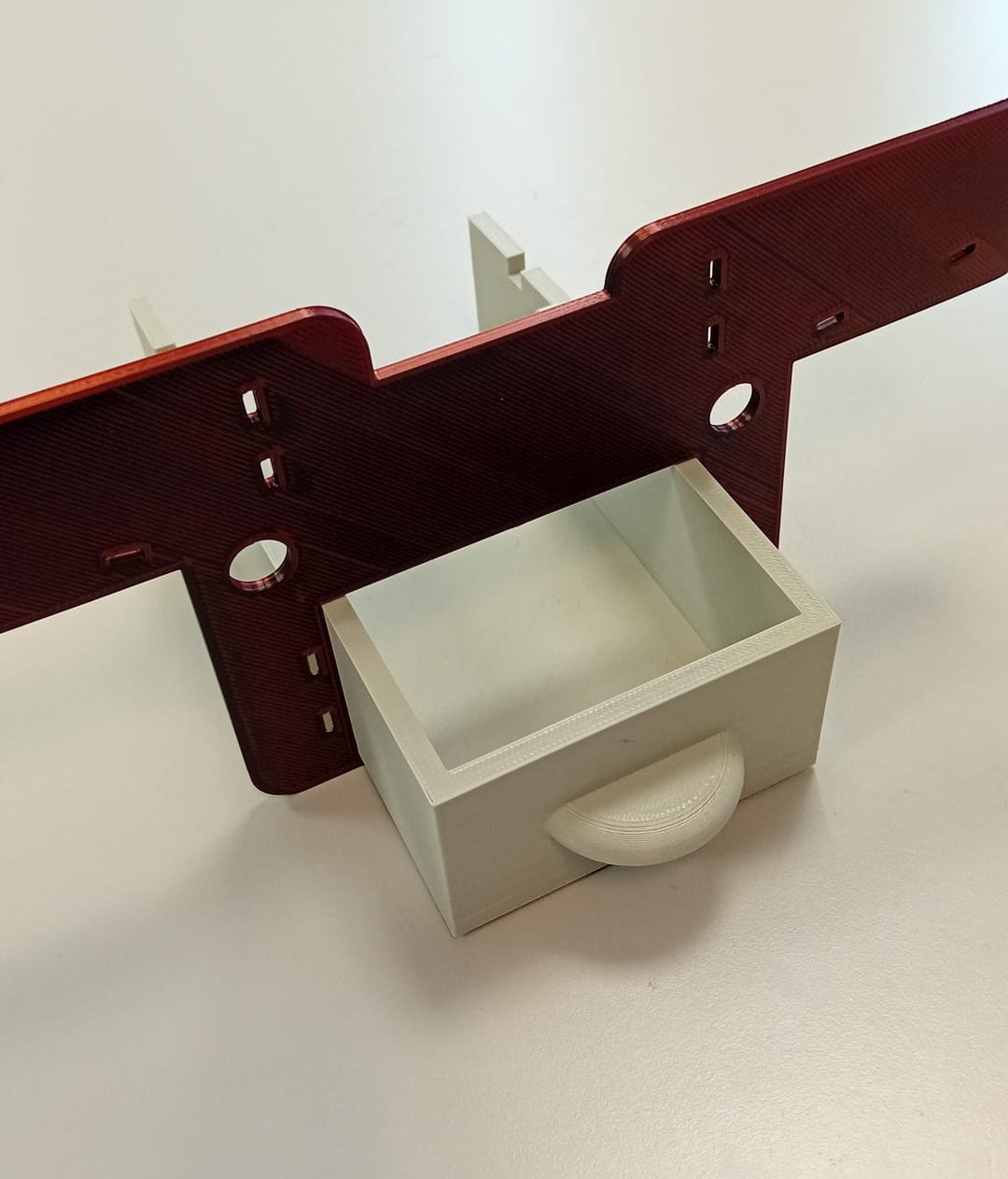](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/photo1.jpeg) [ ](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/photo2.jpeg)[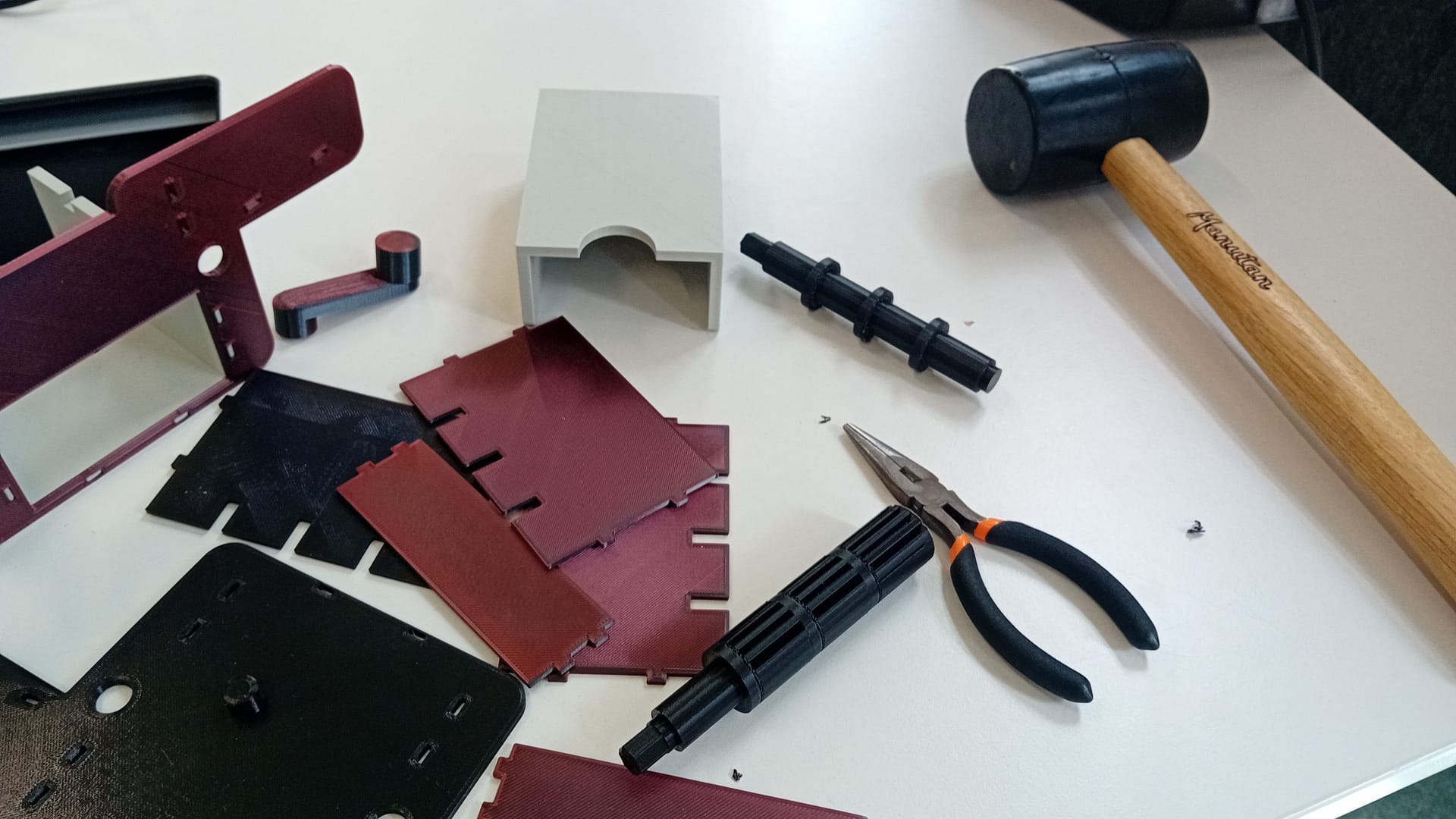](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/photo3.jpeg) **2. Transmission du couple (Arbre 3D / Engrenage Laser) :** Pour transmettre la rotation de la manivelle aux roues sans glissement, nous avons abandonné l'axe cylindrique au profit d'un **profil hexagonal**. - L'arbre imprimé en 3D a été modélisé avec un hexagone régulier (cercle de **11.0 mm**). - L'engrenage découpé au laser devait recevoir cet axe. Connaissant la saignée de la découpeuse laser qui brûle environ 0.1 mm de matière sur chaque bord, le trou hexagonal a été modélisé en CAO à **10.8 mm**. - Une fois découpé, le trou faisait exactement 11.0 mm réels, permettant un ajustement bloqué en force sur l'arbre en plastique, garantissant que l'engrenage entraîne parfaitement l'arbre de mixage. [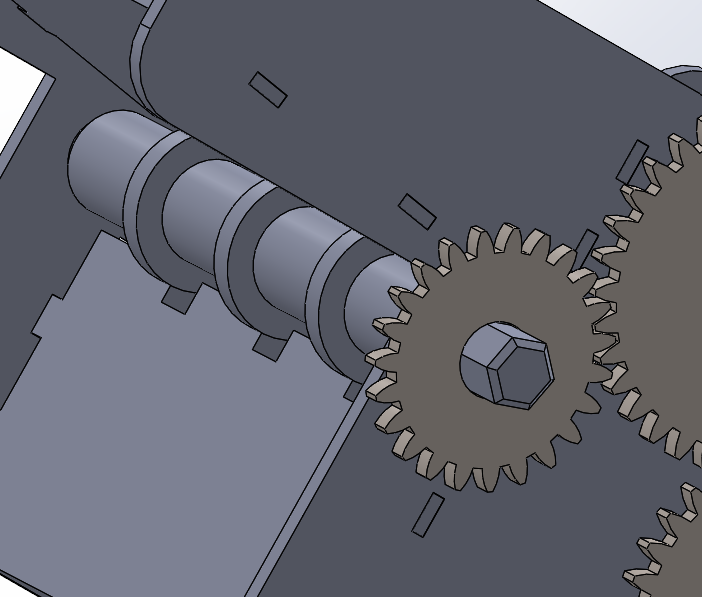](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/KBiimage.png) **3. Guidage en rotation :** Les arbres de transmission doivent traverser l'armature principale en PLA tout en tournant librement. Pour créer ce palier lisse fonctionnel : - La section traversante de l'arbre a été modélisée sous forme cylindrique stricte à **11.0 mm** de diamètre. - Le trou de passage dans l'armature a été modélisé à **11.3 mm**. La légère rétractation thermique du PLA après impression nous a laissé un jeu réel d'environ 0.15 mm, créant un ajustement "glissant juste" : l'arbre tourne de manière très fluide sans pouvoir se désaxer. Un épaulement a été ajouté sur l'axe interne pour servir de butée et empêcher l'arbre d'être tiré vers l'extérieur. [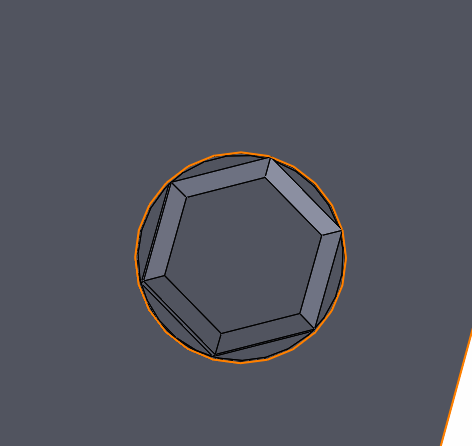](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/gONimage.png)[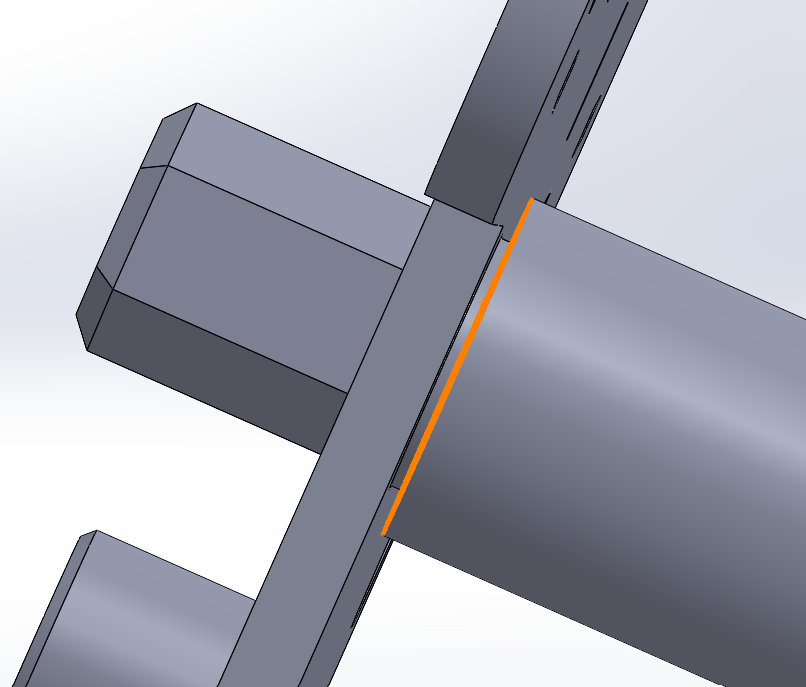](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/YG7image.png) **4. Maintien axial des engrenages (Système élastique) :** Étant donné que le train d'engrenages est positionné à l'extérieur de la boîte en porte-à-faux sur les arbres, il fallait s'assurer que les roues ne se déboîtent pas sous l'effet de la rotation de la manivelle. Pour verrouiller la position axiale de manière simple et démontable, nous avons intégré un système de maintien par élastique. Celui-ci vient créer une tension continue qui plaque les engrenages contre la paroi de l'armature, sécurisant ainsi l'ensemble du système de transmission. ##### **Système d'Engrenages** Le défi principal de cette étape était de concevoir un train d'engrenages capable de relier la manivelle aux deux distributeurs de cartes. Contrainte de positionnement : Pour préserver la structure globale de l'assemblage, on a dû conserver la position des deux axes extérieurs qui entraînent les cartes. Pour assurer la transmission du mouvement, on a quand même la liberté de positionner les axes internes. Pour obtenir un engrenage fonctionnel, on utilise la formule fondamentale liant le module (m), le nombre de dents (Z) et le diamètre primitif (d) : d = m \* Z Toutes nos roues partagent un **module de 1.5** et une **largeur de face (face width) de 3 mm**, correspondant à l'épaisseur de nos plaques de bois. Le nombre de dents de chaque roue a été déterminé par une méthode itérative basée sur la formule : a = m\*(Z1+Z2)/2 avec a : la distance entre les roues (l'entraxe), et Zi : le nombre de dents de la roue i Sur notre assemblage SolidWorks, nous avons d'abord mesuré la distance précise entre les axes des roues de l'assemblage. Et en isolant Z dans la formule de l'entraxe, nous avons cherché le nombre de dents idéal. Puisqu'un engrenage ne peut pas avoir une fraction de dent, nous avons parfois dû ajuster très légèrement la position des trous internes (de l'ordre de quelques dixièmes de millimètres) pour qu'ils correspondent parfaitement à un nombre de dents entier (31 et 33). Par exemple : Pour un entraxe mesuré de 40,5 mm (en x et y), on résout 40.5 = 1.5\*(23 + Z\_int)/2, ce qui nous donne 31 dents. *[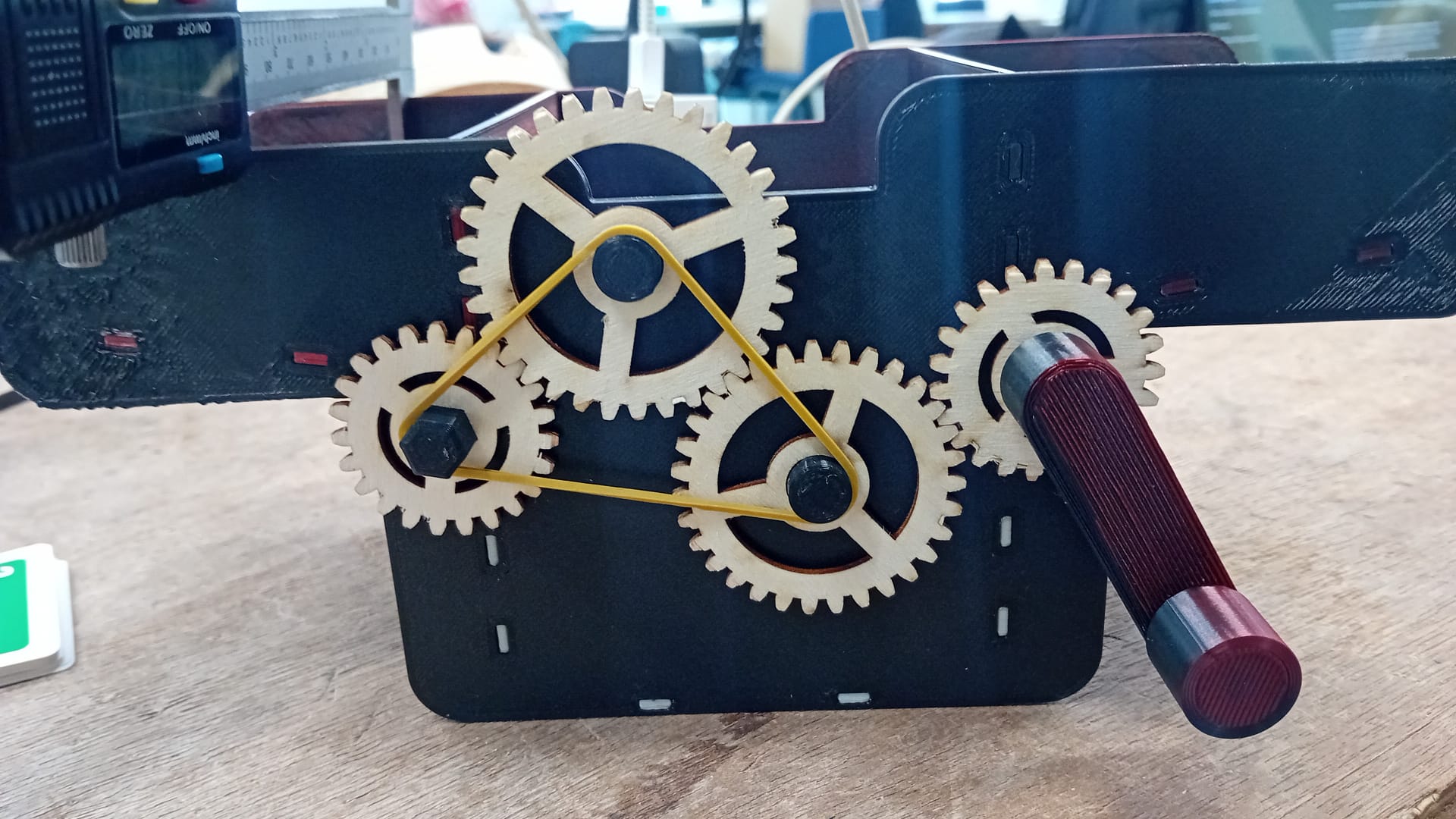](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/whatsapp-image-2026-05-04-at-14-27-55.jpeg)* ##### **Découpage laser** La découpe laser enlève de la matière : le faisceau brûle une fine largeur de matériau lors de son passage. Pour obtenir un assemblage précis, notamment pour le système d'engrenages et les liaisons avec les arbres de transmission, nous avons dû anticiper cette "perte de matière". Pour que les dents des engrenages s'engrènent parfaitement sans jeu excessif et que l'ajustement sur l'arbre soit "serré", nous avons augmenté le diamètre des roues de 0.2mm. Ceci nous a permit d'avoir une transmission du mouvement fluide sans glissement parasite. *[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/inkscape.png)* En calibrant précisément la focalisation de la buse laser et en compensant le trait de coupe, nous avons obtenu une découpe des engrenages dans du contreplaqué de 3 mm. ##### **Problèmes rencontrés** Une fois l’assemblage physique terminé, les premiers tests de fonctionnement ont révélé des dysfonctionnements au niveau de la fonction principale du système : la distribution des cartes. Malgré une rotation fluide et robuste du train d'engrenages, le transfert des cartes vers le tiroir central ne s'effectue pas comme prévu. Nous avons identifié trois problèmes mécaniques distincts : - **Défaut d'inclinaison et blocage :** L'angle d'inclinaison initial des compartiments latéraux s'est avéré inadapté. La gravité ne permet pas au paquet de cartes d'exercer une pression suffisante sur les arbres de transmission. Par conséquent, les cartes ne se dirigent pas naturellement vers la fente de sortie et restent bloquées dans leur bac. - **Manque d'adhérence :** Lors de l'activation de la manivelle, l'arbre de transmission imprimé en PLA lisse glisse à la surface de la carte inférieure sans parvenir à l'entraîner. Le coefficient de frottement cinétique entre le plastique rigide et le carton pelliculé des cartes est beaucoup trop faible pour générer le mouvement. - **Défaut de distribution unitaire :** Le but d'un mélangeur est de faire tomber les cartes une par une et à tour de rôle. Même en compensant manuellement l'inclinaison pour forcer le contact avec l'arbre, le système ne parvient pas à isoler une seule carte : soit le paquet entier glisse, soit plusieurs cartes passent en même temps du même côté. ##### **Résultats et améliorations** En prenant en compte les problèmes constatés, ce projet doit être considéré comme un **prototype V1**. Si la partie de transmission de puissance (châssis, tolérances d'assemblage, calcul et découpe des engrenages) est une réussite, la partie fonctionnelle de distribution nécessite une itération de conception. Pour transformer ce prototype en un mélangeur de cartes pleinement fonctionnel, les améliorations suivantes doivent être apportées : **Optimisation de l'angle d'attaque :** Pour pallier le problème de descente des cartes, nous avons modélisé et imprimé en 3D des supports d'inclinaison lors de nos tests. Bien que cela améliore le contact carte/arbre, cela reste insuffisant. Pour une V2, il faudra intégrer directement à la CAO du châssis un angle de pente beaucoup plus prononcé (idéalement autour de 45° à 60°) pour que le poids du paquet plaque constamment la première carte contre le rouleau distributeur. **Augmentation du coefficient de friction des arbres :** Pour régler le glissement de l'arbre sur les cartes, il faudrait modifier la surface de contact. Plusieurs solutions sont envisageables : - Usiner des gorges sur l'arbre en PLA pour y insérer des **joints toriques en caoutchouc**. - Imprimer des bagues texturées en **filament flexible (TPU)** qui viendraient s'emboîter en force sur l'arbre hexagonal. - Ajouter une fine bande d'adhésif antidérapant sur la zone de contact. **Calibrage de la fente de sortie :** Pour que les cartes tombent une par une. L'ouverture par laquelle la carte est expulsée du bac doit être repensée pour agir comme un "filtre". Il faudra concevoir une fente dont la hauteur est strictement supérieure à l'épaisseur d'une carte, mais inférieure à l'épaisseur de deux cartes (soit environ 1,5 fois l'épaisseur d'une carte standard). L'ajout d'une petite bavette flexible (en TPU ou en plastique fin) au-dessus de cette fente permettrait de retenir le reste du paquet pendant que le rouleau antidérapant n'entraîne que la carte située tout en dessous. # Flipper Mécanique **Membres** **:** Guillerme Dimitri / Guillet-Riconda Alexandre / Alba Mayi ### **Contexte** La dernière étape de l'UE UM4RBM20 est de fabriquer un assemblage complet avec comme consigne d'y inclure un système mécanique et d'utiliser au moins deux machines distinctes du Fablab. Nous avons choisis de réaliser un flipper mécanique en utilisant la découpeuse laser pour la base, les parois et les obstacles et l'impression 3D pour le système mécanique. ### **Modélisation/Assemblage de la base** La première étape a été de modéliser la base et les parois de notre flipper. Pour cela il a fallut définir la taille de notre flipper et déterminer où allaient être les différents trous pour y fixer les batteurs, le mécanisme qui les accompagnent et le trou permettant de propulser la bille. On a aussi ajouté des trous au niveau de la base qui permettrons de définir les positions où devront atterrir les billes pour gagner. Les distances ici sont très importantes car elle doivent permettre par la suite d'avoir des pièces mécanique fonctionnelles qui s'assemble bien à la fois entre elle mais aussi à notre base et parois. ##### **BOXES.PY** Pour modéliser la base et permettre une bonne fixation de celle-ci au parois nous sommes passé par le site boxes.py, qui permet de modéliser toutes sortes de boites en assemblant des planche de bois entre elles coupées au préalable à la découpeuse laser. On a choisis comme type de boite ABox, auquel on a ajouté les dimensions souhaités de notre flipper, une épaisseur de 6mm pour s'assurer de la solidité et baissé légèrement le coefficient de brûlage (à 0,1 mm par défaut) pour bien pouvoir emboiter les différentes parties entre elle. Enfin, on a sauvegarder le tout en un fichier compatible avec la découpeuse laser (.svg ou .dxf) [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/image.png) ##### **INKSCAPE** Ensuite, il a fallu modifier la position des mortaises (encoches au niveau des parois pour assembler la base aux parois). L'objectif est d'avoir assez de place en dessous pour pouvoir par la suite y ajouter le mécanisme des batteurs mais aussi de s'assurer que les parois du flipper soient assez haute pour que la bille ne sorte pas du flipper. Pour cela on a utiliser le logiciel Inkscape en utilisant l'échelle mis à disposition que l'on a bien mis en mm. Il a aussi fallu rajouter les différents trous qui allaient être fait par la découpeuse laser en faisant bien attention a respecter les positions et diamètre définis au préalable, en utilisant les fonctions et échelle de ce même logiciel. [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/z3Gimage.png) ##### **Découpe laser** La prochaine étape a été de découper le tout à la découpeuse laser. Vu que la taille de notre Flipper était trop grande pour une seule découpe, on a effectué plusieurs découpe en séparant les différentes parties de notre flipper. Pour ce qui est du matériel et des réglages utilisés, on a pris du CP peuplier 6mm et tout les traits ont été changés en rouge (découpe) sauf les lettres W, I et N qui ont été mise en bleu (gravure). Le but du jeu est donc de réussir à mettre les 3 billes dans les 3 trous. Il ne restait plus qu'a assembler la base et les parois entre elles ! ### **Batteurs et système mécanique** Le principe utilisé ici a été choisis après avoir fait quelque recherche sur le fonctionnement des différents modèles de flipper. On a opté pour un système totalement mécanique provenant d'une short youtube trouvé en ligne : [https://youtube.com/shorts/p8Knw\_GUiiI?si=Rb\_-jECKjR0I4MDs](https://youtube.com/shorts/p8Knw_GUiiI?si=Rb_-jECKjR0I4MDs) Seulement, on voit sur cette vidéo seulement l'assemblage du flipper qui est lui fait entièrement en Impression 3D ce qui soulève 2 questions, quelle taille doit on prendre pour chaque pièce composant le mécanisme et est-ce que le fait de combiner des pièces en PLA et en bois ne posera pas un problème de frottement ? Pour ce qui est des tailles des différentes pièces, on s'est basé sur les distances de notre flipper en adaptant les pièces pour qu'elle puisse bien se fixer entre elle est dans les trous du flipper. Pour ce qui est des frottements, on a choisis de modifier un peu le principe du mécanisme pour avoir des pièces qui frottent le moins possible à la partie en bois. il faut aussi faire attention a réduire un peu le diamètre des pièce qui vont passer à travers les trous de la base et des parois. ##### **Modélisation Solidworks** On a donc effectué toute ces pièces sur le logiciel Solidworks. Le mécanisme est donc composé de 3 pièces de chaque coté du Flipper. [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/UTtimage.png) [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/7NVimage.png) [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/9SBimage.png) On a par la suite imprimée ces différentes pièces avec une imprimante 3D en faisant bien attention d'ajouter des bordures et supports. ##### **Fonctionnement** On met dans un premier temps le batteur dans l'un des 2 trous de la base, on fixe ensuite en dessous de la base la 2ème pièce avec l'encoche (en orange sur la photo) qui servira à déplacer le batteur lorsqu'on le déplace. Ensuite on ajoute le poussoir dans le trou correspondant sur les parois latérales et la dernière étape est de fixer un clou avec 2 élastiques qui serviront pour bloquer le poussoir et faire revenir le batteur dans la position de repos après que l'on ai poussé. Le poussoir étant bloqué, il ne frotte pas sur la base en bois ce qui permet un mouvement fluide. #### [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/whatsapp-image-2026-05-04-at-19-34-26.jpeg) ### **Obstacles Sur la Base** [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/qIjimage.png) [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/KOVimage.png) La première étape sur SolidWorks a été de dessiner les contours de toutes nos pièces à plat. Nous avons pour cela créé une nouvelle Esquisse sur un plan de référence. Selon les formes requises, nous avons utilisé différents outils : Les formes géométriques simples : Pour concevoir le triangle central, les blocs rectangulaires, ainsi que les petites pièces en "V" destinées à caler les billes, nous avons utilisé les outils Ligne et Rectangle. Les éléments circulaires : Pour les obstacles de type "bumpers" ronds situés sur le plateau, nous avons utilisé l'outil Cercle. Les murs : Pour les murs extérieurs de guidage présentant des formes ondulées, nous avons fait appel à l'outil Spline. Cet outil nous a permis de tracer des courbes fluides et continues en ajustant des points de contrôle, garantissant ainsi une bonne circulation de la bille. La première capture d'écran montre 3 éléments importants au bon fonctionnement du flipper. La rampe de lancement à gauche d'où part la bille, les couloirs qui permettent de ramener la bille au batteurs ( les 2 premières pièces en partant du haut ) ainsi que les deux triangles associés qui permettent à la bille de rouler sans sortir du couloir. Les triangles servent aussi à créer un rebond en amont des batteurs et ainsi la bille peut rouler entre les deux batteurs. La deuxième capture d'écran montre toute les pièces dans un second temps. Les deux murs aux bords en forme de vague ferment la structure pour que la bille ne puisse tomber qu'entre les deux batteurs. Les autres pièces ont été collés sur la structure de manière à créer un jeu ludique. Nous avons ensuite tout extrudés, puis sauvegarder ces pièces sous un fichier dxf adaptée à la découpe laser. Nous avons réalisé toutes les pièces deux fois et les avons collés les unes sur les autres pour que la balle ne saute pas au dessus des obstacles quand on joue. ### **Propulsion bille** [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/cc6image.png) Pour la propulsion de la bille on avait au préalable fais des trous dans nos supports en bois afin d'y placer la pièce ci dessus. La partie circulaire au bout de la pièce permet de bloquer le propulseur, à lequel on a ajouté un ressort. Il suffit de tirer le propulseur vers nous pour envoyer la balle dans le flipper. ### **Résultat** **[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/whatsapp-image-2026-05-05-at-14-13-47.jpeg)** Le flipper mécanique fonctionne très bien et le résultat est satisfaisant. Les billes sont propulsés correctement dans le couloir de lancement, elles sont assez légères pour bien être renvoyées par les batteurs et elles se posent très bien dans les trous prévus à cet effet. ### **Perspective d'amélioration** Il faudrait refaire les gravures qui n'ont pas réussis pour que l'utilisateur comprenne instinctivement que le but est de mettre les billes dans chacun des trous. La bille peut se coincer en haut de notre structure, on pourrait déplacer une des pièces pour éviter ceci. Il y'a un trou un peu trop grand sous le propulseur (dû à une mauvaise manip avec la découpe laser, lorsque on a fait ce trou on c'est basé sur ce que l'on voyait dans l'écran de la découpeuse mais ça ne correspond pas exactement aux vrais distances). Il faudrait penser à un moyen de le combler. Enfin pour la pièce avec le ressort et les 2 pièces servant à faire bouger les batteurs on pourrait ajouter une pièce permettant d'empécher ces 3 pièces de se bloquer dans le flipper. Pour l'instant on à juste collé des petites chutes en bois au bout mais ce n'est pas optimal car la colle n'est pas adapté pour coller une pièce en PLA et du bois. # Maison ### Informations - VALENTIN Amélie, SZOPKA Pola, MOCUMBI TOMÁS Thindeka -| Réglages d'impression | 0.20mm SPEED |
| Filament | Generic PLA |
| Remplissage | 15% |
| Temps d'impression | environ 12h30 |
| Projet Fablab 2025/2026 M1 Rob |
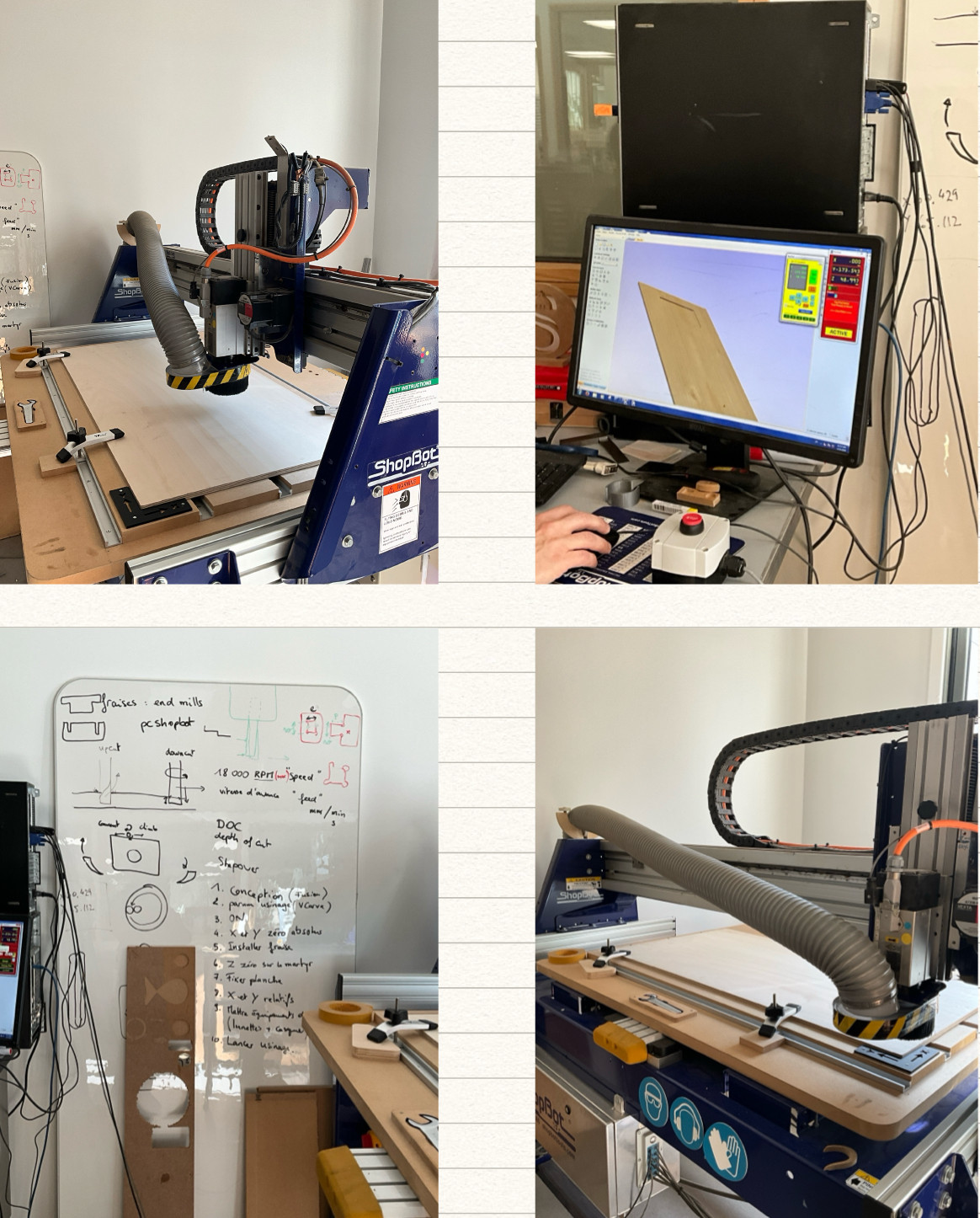
Objectif : Concevoir un panneau multifonctions en utilisant un ensemble des outils présentés au Fablab.
Ne pas oublier de mettre les équipements de protection (lunettes et casques) et gardez l'arrêt d'urgence en main.
Une fois prêt, on sauvegarde et on lance l'usinage.Restez attentif à tout bruit désagréable à l'oreille, en cas de risque enclencher l'arrêt d'urgence.
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/img-1598.jpg) [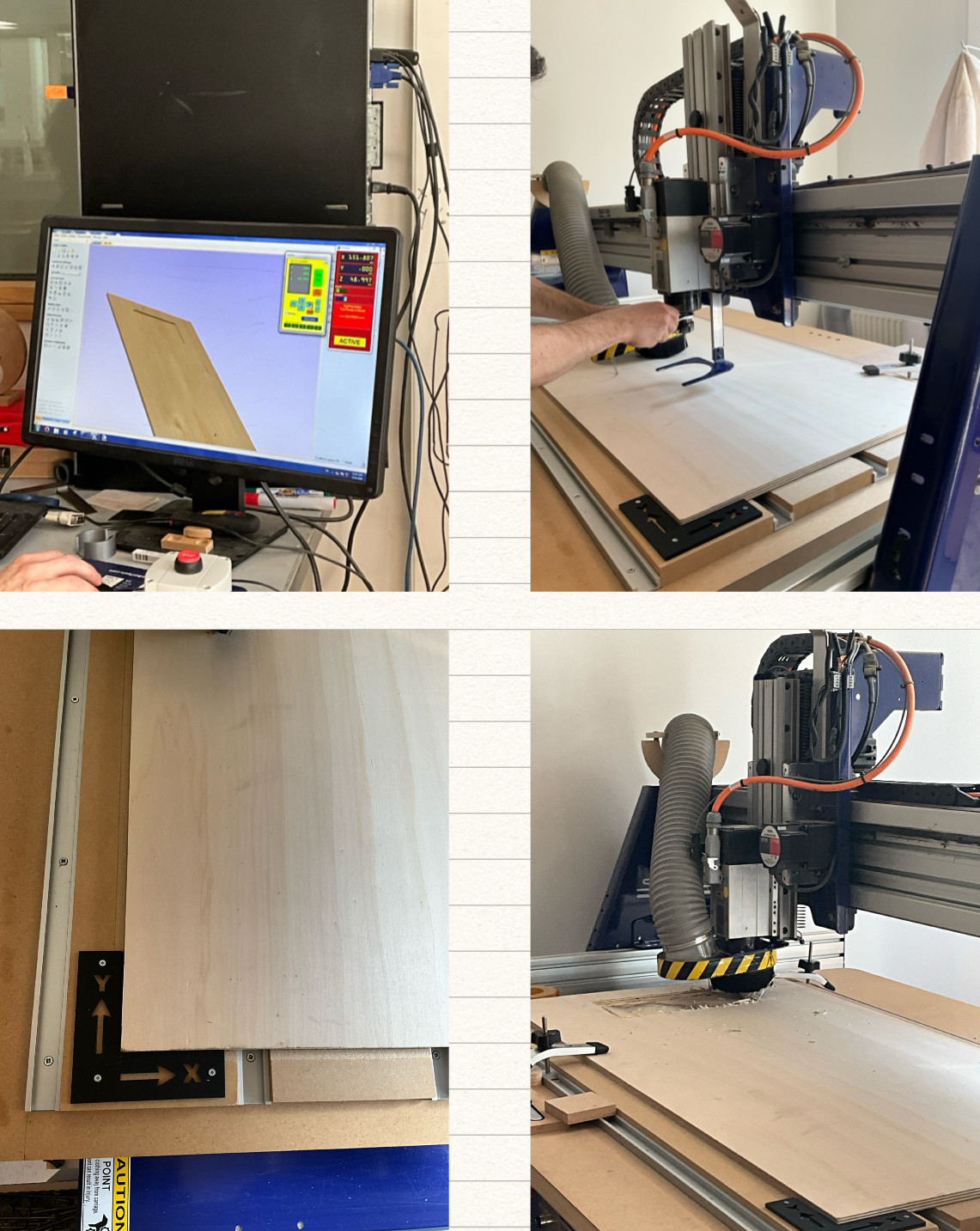](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/img-1599.jpg) [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/img-1600.jpg) Après découpe, on a poncé la découpe pour un résultat optimal. ##### Découpe laser Maintenant que notre base est dessinée, on découpe et grave le portrait que l'on va insérer dans la poche. Le dessin a été au préalable fait sur un logiciel de dessin en se basant sur une photo avec quelques détails complexes pour voir la complexité de la gravure au laser. La gravure a été faite sur de contreplaqué 3mm pour bien s'emboîter, et on a imprimé un contour que l'on a collé tout autour de la gravure pour cacher les imperfections de la fraiseuse numérique. [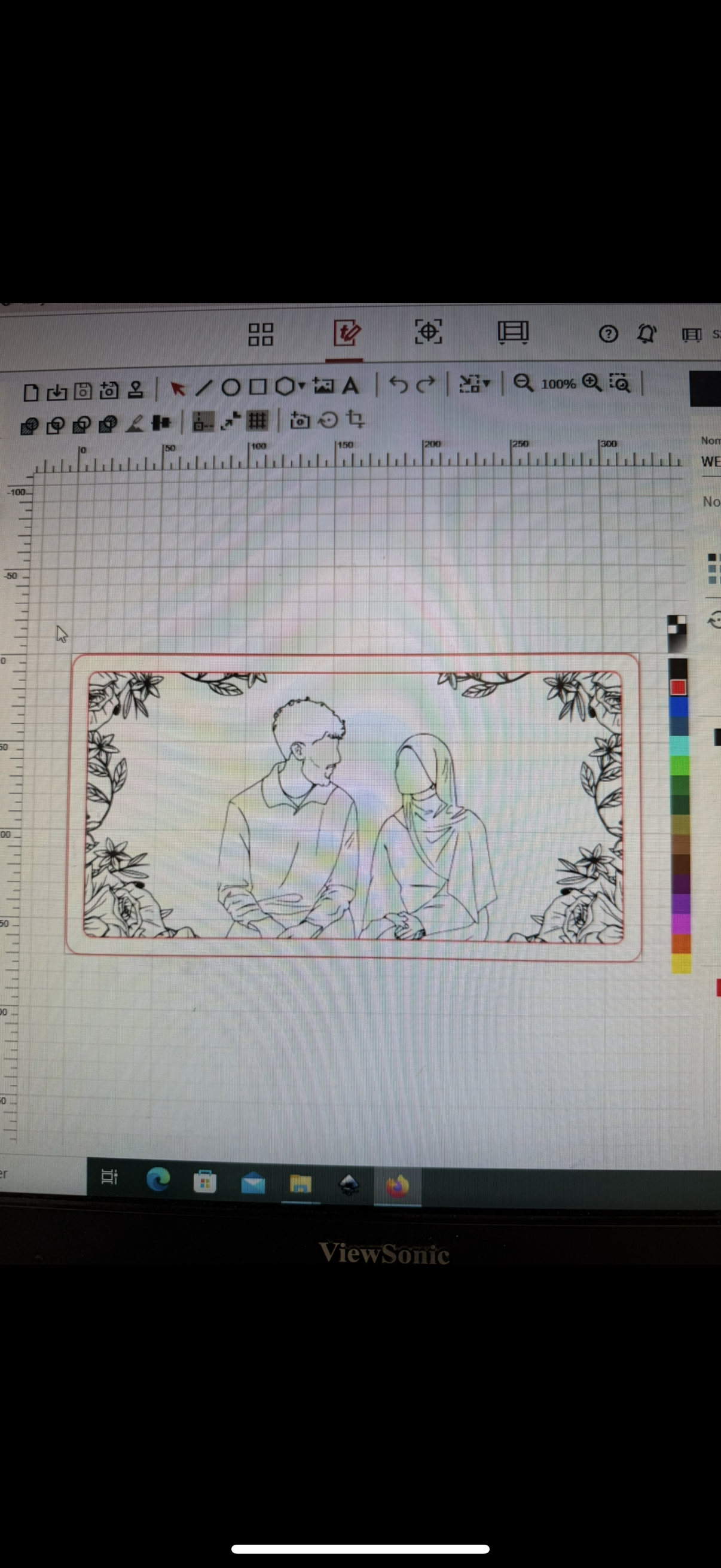 ](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/j62img-7369.PNG)[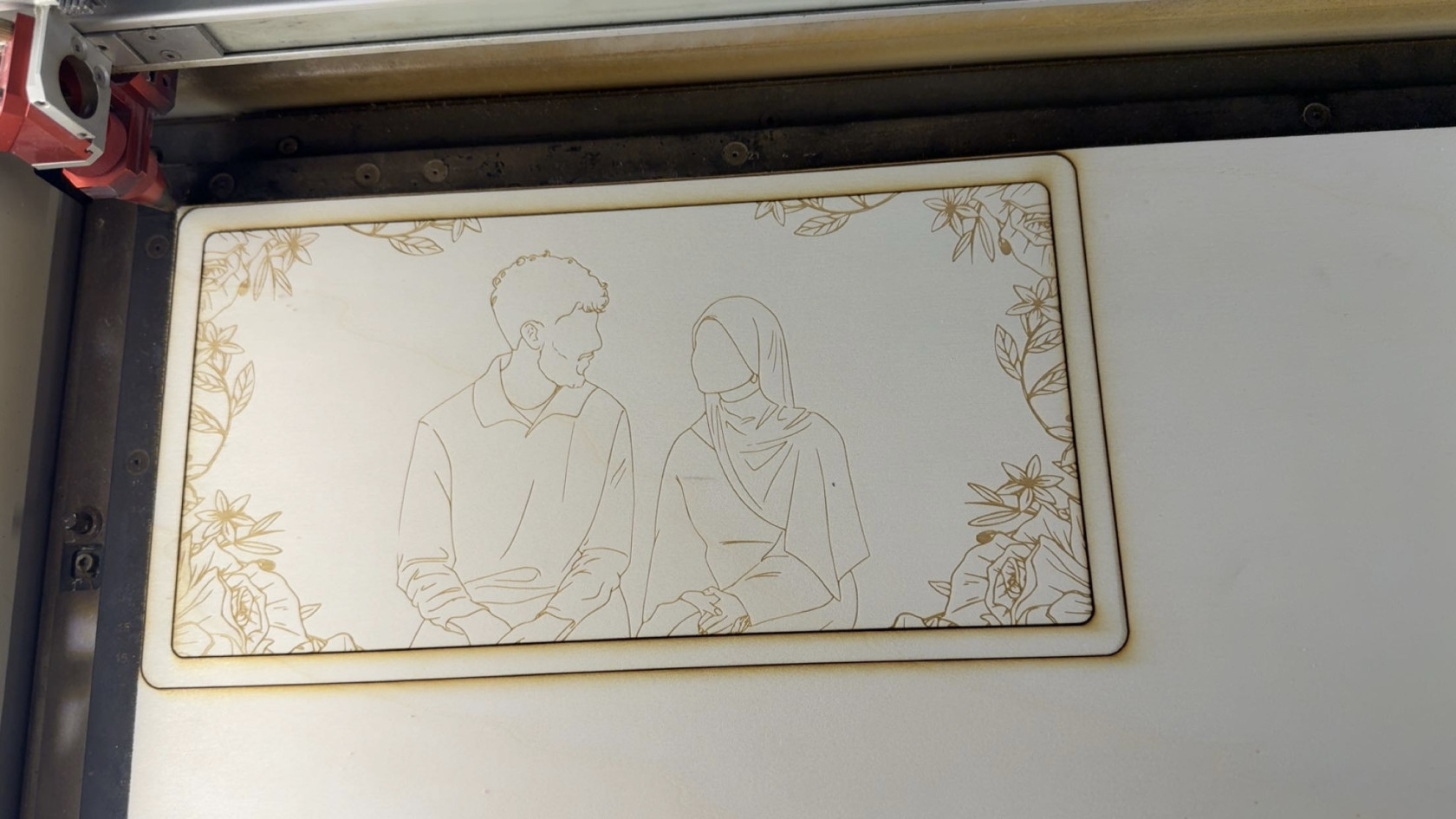](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/img-7368.jpg) #### Boîte à Kodak L'idée était de confectionner 4 boîtes ouvertes dans lesquelles on stockerait les appareils photo jetables. Les appareils seraient accessibles et à bonne hauteur pour les utilisateurs. On a pour cela récupéré les dimensions d'un appareil photo kodak classique et procédé à la confection de l'étui. ##### Guide montage Nous avons utilisé le logiciel de modélisation 3D SolidWorks pour conceptualiser notre pièce. Voici le rendu final de cette modélisation. [ ](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/eZ6image.png)[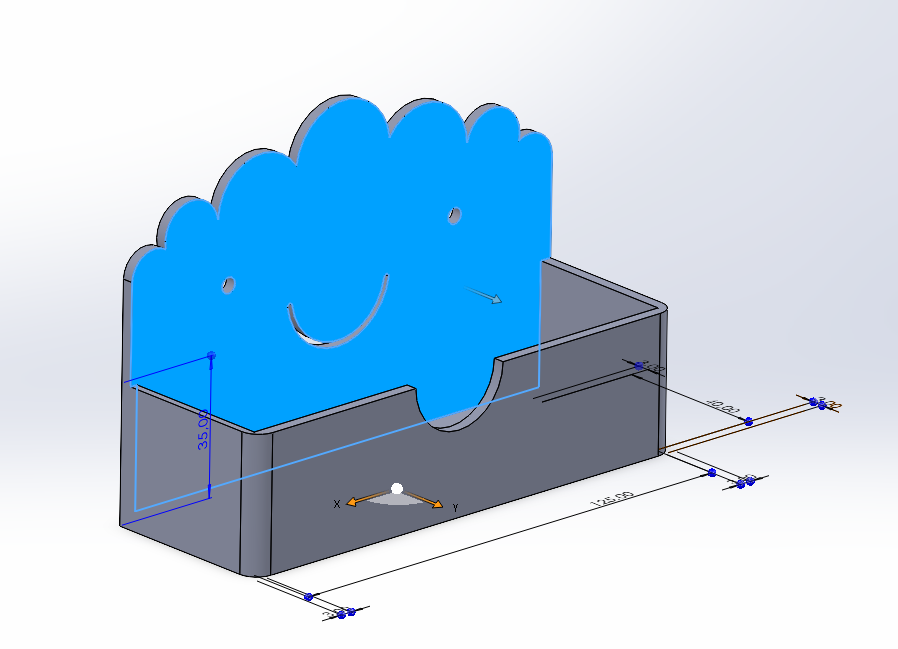](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/E2Cimage.png) ##### Conception Nous avons confectionné sur le logiciel Solidworks quatre boîtes de polaroid de 12,5\*40cm taille adéquate pour un Kodak classique. ##### Matériau Nous avons utilisé du PLA acheté et imprimé avec une Bambulab X1C. Ce type de filament est le plus judicieux ici car nous n'avons pas de contraintes particulières liées aux conditions d'utilisation à part une bonne résistance des pièces à l'usure, donc le PLA se présente comme le meilleur choix générique. ##### Tranchage \[Slicing\] Nous avons préalablement réalisé une impression test sur une imprimante 3D Prusa M4KS avec les paramètres suivants en utilisant le logiciel PrusaSlicer pour le tranchage. :| **Paramètre** | **Valeur utilisée** | **Note technique** |
| **Hauteur de couche** | *2mm* | Hauteur de couche standard qui garantit une bonne qualité de finition. |
| **Périmètres (murs)** | 2 | Périmètre standard car pas besoin spécifique ou d'étanchéité. |
| **Température de la buse** | *230°C* | Température de buse standard. |
| **Remplissage** | *10%* | Nous avons mis une faible densité de remplissage étant donné que c'était un test pour vérifier les dimensions avec le kodak. |
| **Paramètre** | **Valeur utilisée** | **Note technique** |
| **Hauteur de couche** | *2mm* | Hauteur de couche standard qui garantit une bonne qualité de finition. |
| **Périmètres (murs)** | 2 | Perimètre standard car pas besoin spécifiques ou d'étanchéité |
| **Température de la buse** | *230°C* | Température de buse standard |
| **Remplissage** | *15%* | Densité d'impression standard |
Assurez-vous que le côté imprimé de la pièce de verrouillage soit aligné à plat contre le côté de la boîte. Les bords supérieurs chanfreinés sont conçus pour s'ajuster parfaitement sur la broche chanfreinée.
#### Grand assemblage On fixe l'ensemble des boîtes polaroids et la boîte à pince sur la planche en visant des vis M4 de longueur 20mm. [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/q7Jimg-7373.jpg)[ ](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/yzJimg-7374.jpg) L'arrière des vis a été refermé avec des chutes de MDF récupéré au Fablab pour éviter que l'on se blesse avec l'arrière des vis. Les chutes de MDF sont un bon exemple de récupération de matériau et de conception plus respectueuse de l'environnement. [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/oNQimg-7377.jpg)  On a ensuite fixé les trois fils au centre de la planche où l'on accrochera l'ensemble des photos avec nos pinces. Le résultat est comme ce qui était attendu ! Un mécanisme à engrenages permet l'utilisation conforme de l'ensemble de l'oeuvre et plusieurs outils et machines du fablab ont été utilisés. [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/img-7380.jpg) # doigt robotique pour Projet fablab, UM4RBM20 **Membres** : Xiaoyu Sun ; Franciszek Guzek ##### **avant-propos** Ce projet s’inspire des travaux présentés dans l’article scientifique Integrated linkage-driven dexterous anthropomorphic robotic hand [https://www.nature.com/articles/s41467-021-27261-0](https://www.nature.com/articles/s41467-021-27261-0) ##### **Introduction:** Ce projet nous permet de maîtriser différentes techniques de fabrication, d'anticiper les interactions entre des matériaux différents et gérer une chaîne de conception allant de la CAO jusqu'au montage final. Nous nous concentrons sur la conception et la realisation d’un doigt robotique inspiré de cette approche. L’objectif est de proposer un mécanisme reproductible en FabLab. Nous objectif sera de proposer un mécanisme d'un doigt robotique en FabLab, combinant : - une structure simple à fabriquer, reliant différentes techniques de fabrication - une transmission mécanique efficace avec des matériaux différant ( notamment bois et pla ) Ce travail sert à nous familiariser et a implémenter les technique de conceptions au sein du fablab. ##### **Le projet:** Le doigt robotisé réalisé à liaisons mécaniques (linkage-driven) s’inscrit dans la continuité des travaux présentés dans l’article *Integrated linkage-driven dexterous anthropomorphic robotic hand* publié dans Nature Communications (Kim et al., 2021). Il reprend le principe d’un mécanisme à liaisons permettant de générer plusieurs degrés de liberté à partir d’une transmission mécanique compacte, sans recourir à des systèmes de câbles complexes. Le mécanisme du doigt repose sur une combinaison de structures parallèles et en série, permettant de reproduire les mouvements d’un doigt humain avec seulement quelques actionneurs. Cette architecture présente l’avantage de proposer une transmission de mouvement efficace et compacte, tout en conservant une bonne capacité de génération de force et de précision. En s’appuyant uniquement sur des éléments rigides, le mécanisme gagne en robustesse et en fiabilité par rapport à des solutions utilisant des câbles ou des tendons. Par exemple les bras présentés dans l'article présenté est tout autant capable d' écraser une canette ou de tenir un œuf sans le casser. ##### **Modélisation sur Solidworks:** [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/s5limage.png)[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/yTuimage.png) l'objectif a été de modéliser toutes les parties du doigt et de l'assembler pour pour voir sa faisabilité. Nous avons mis un peu de jeu entre les pieces et avons crées que 2 types de joints sans filletages pour se faciliter le montage. ##### **1ere Impression 3d : ** Notre première approche a été de disposer toutes les pièces sur le même plateau: [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/AE5image.png) Certaines petites pièces se sont rapidement décollées du plateau, probablement à cause d’une surface d’adhérence insuffisante, tandis que les pièces plus grandes ont commencé à se déformer légèrement (warping). Avec un temps d’impression long, ces défauts se sont amplifiés et une pièce décollée a fini par être déplacée par la buse se collant à une autre pièce, perturbant créant un problème en chaine. Cette première tentative nous a montré qu’il est préférable de séparer les impressions selon la taille et la fonction des pièces afin d’améliorer la fiabilité et la qualité finale. De plus nous avons ajouté des supports organiques faciles à enlever que les ponts suicides et donnant un meilleur résultat (Moins de contact avec les pièces ) pour les parties nécessitant des supports ainsi que des radeaux pour chaque pièces pour éviter les décollements. Car nous allions diviser l'impression en plusieurs plateaux, nous avons jugé utile d'aggrandir la taille des pièces de 150% directement sur prusa slicer. ##### **2eme impression 3d ( réussie):** nos plateaux utilisés [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/Fqnimage.png)[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/bnnimage.png) nos résultats d'impression (les pieces ont étés imprimées plusieurs fois en cas de mauvaise manipulation et de casse) [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/Aonimage.png)[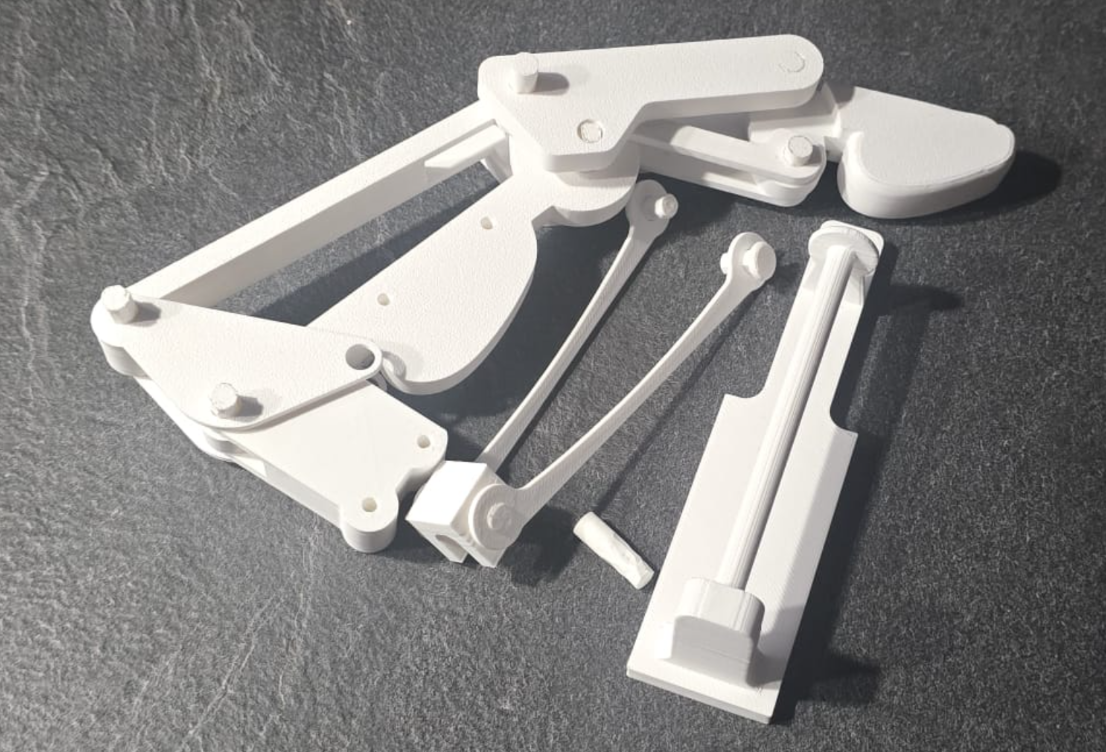](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/zjwimage.png) Ces deux impressions se sont bien déroulées et on donnés des résultats satisfaisants, à noter qu'on pourrait ajouter une option de ponçage pour avoir une surface plus fluide, nous pouvons aussi réaliser un post traitement tel que de la lubrification du rail afin d'améliorer le glissement ( nous le ferons si nécessaire avant la présentation). [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/DL8image.png) image de l'autre plateau de la découpe faite en parallèle ##### **Découpe LASER** Afin d’évaluer les interactions entre des pièces imprimées en PLA et des éléments en bois, nous avons choisi de réaliser certaines jointures du doigt robotisé par découpe laser. Cette approche permet de produire rapidement des pièces en bois avec une bonne précision et des surfaces plus lisses que l’impression 3D, notamment pour les zones de contact et de glissement. En comparant ces assemblages hybrides (PLA + bois) avec des versions entièrement imprimées. Nous allons transformer les pièces les plus adaptés de solidworks ai format svg. Nous avons utilisé le contreplaqué de peuplier de 3 mm en intégrant directement les dimensions et les jeux nécessaires à l’assemblage. Nous avons aussi pensés à prendre le bord de la plaque de cp-3mm par soucis d'économies. Au vu du projet, seule la fonction de découpe etait necessaire. La machine a été paramétrée avec une puissance de 35 % et une vitesse de 1,2 %, ce qui a permis d’obtenir une découpe complète en un seul passage tout en limitant les défauts sur les arêtes. [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/gveimage.png)[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/1Jaimage.png) ##### **Résultat:** [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/Q3Pimage.png)[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/L3Wimage.png) **Amélioration**: une pièce désigné un peu trop grande bloque le fonctionnement attendu du doigt, les outils utilisé dans le fablab nous a permis de verifier le problème de notre prototype, là ou solidworks ne permet pas réellement de voir ces problemes. # BOITE CANARD VOLANT Membres : Morgane ARCHAMBAUD, Uxue AIZPURUA UBEDA et Sofia CHAMILLARD ### **Introduction** Étudiantes en Master 1, parcours ROB, de la mention Automatique, Robotique (AR) à Sorbonne Université, nous avons réalisé ce projet dans le cadre de l'unité d'enseignement UM4RBM20. L'objectif était de confectionner un objet comportant un mécanisme composé d'un assemblage et nécessitant l'utilisation d'au moins deux machines présentes au fablab et vues en cours (imprimante 3D, découpeuse laser, découpeuse jet d'eau ou encore la fraiseuse). Notre choix de projet est le suivant : Un canard en bois, positionné sur une boîte à manivelle, lui permettant de battre des ailes. Nous avons fait ce choix car nous voulions un projet qui corresponde à notre mascotte (un canard), nous voulions également mener un projet amusant bien qu'assez difficile à concevoir. Nous avons effectué quelques recherches pour trouver des inspirations et nous avons trouvé par exemple l'image suivante : [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/zz.PNG) Notre choix s'est porté sur un canard à réaliser à la découpeuse laser, un mécanisme (permettant le mouvement du canard) à l'imprimante 3D, et enfin une boîte en bois, à la scie. Les défis de ce projet étaient les suivants : - La découpeuse Laser : Le choix du matériau, l'épaisseur de ce dernier et l'assemblage, sans utiliser le site : [Boîte universelle - Boxes,](https://boxes.hackerspace-bamberg.de/UniversalBox?language=fr) en modélisant tout sur SolidWorks, ajouter une tolérance suffisante pour permettre l'assemblage des pièces. - L'imprimante 3D : Modéliser les pièces sur Solidworks, ajouter assez de jeu pour l'assemblage des pièces, choisir les bons paramètres d'impression pour avoir un temps d'impression et une solidité des pièces optimisée.OB×OD=OA2−AB2=constante
[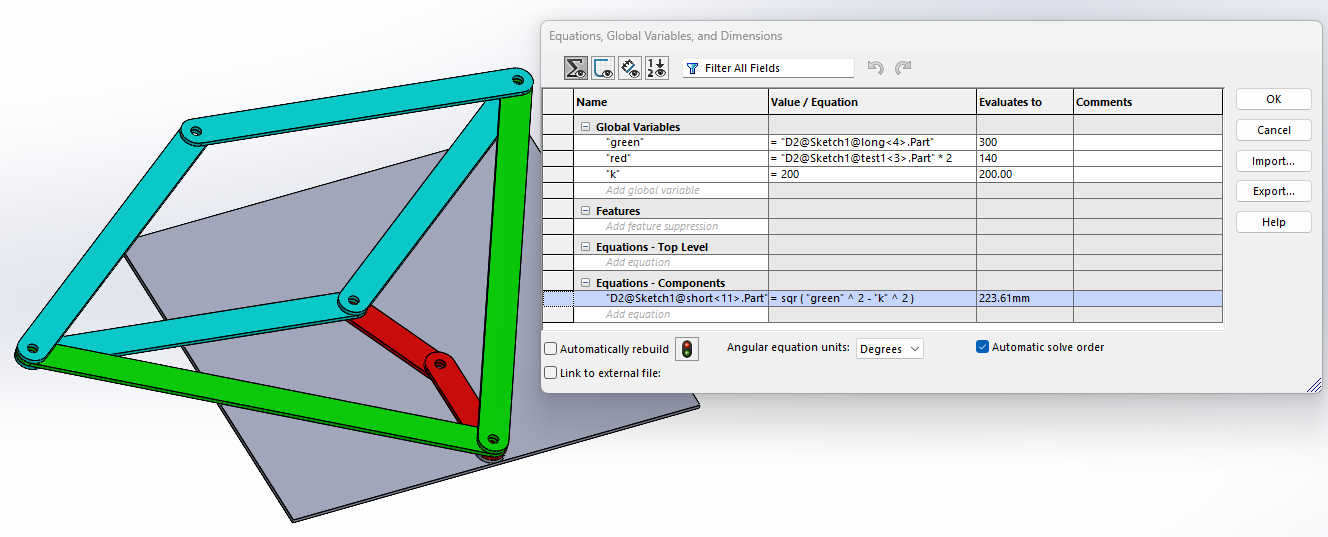](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/screenshot-2026-05-05-031017.png) Dans SolidWorks, on a défini les dimensions avec trois variables globales : `green` (*les grandes tiges = 300 mm*), `red` (*les petites tiges du losange = 140 mm*) et `k` = *200 mm.* La longueur de la tige courte est ensuite calculée automatiquement :short = √(green² − k²) = √(300² − 200²) ≈ 223,61 mm
C'est cette relation qui garantit que le point D trace une **ligne parfaitement droite** quand B tourne. Dans le montage, deux points restent fixes : le point O (ancrage principal) et le centre du cercle décrit par B. Voici une simulation sur [Geogebra](https://www.geogebra.org/m/QYxwdNmC). ### **Preuve de concept** [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/whatsapp-image-2026-05-05-at-12-20-45.jpeg) On a d'abord tout modélisé sur SolidWorks pour vérifier que ça marchait en simulation et effectivement, la trajectoire était parfaitement droite. On est ensuite passés à la pratique en découpant tout le mécanisme au laser. Globalement, ça fonctionnait : la trajectoire était à peu près droite.Mais le problème était clairement visible : **trop de jeu dans les articulations**.
Les jointures avaient été imprimées en 3D avec un peu de jeu exprès pour éviter que ça coince, sauf qu'avec 6 axes dans la chaîne, tous ces petits jeux s'accumulent.
En touchant juste légèrement l'organe terminal, on pouvait le faire bouger de **2 à 3 cm** vers le haut ou vers le bas c'était vraiment inutilisable. [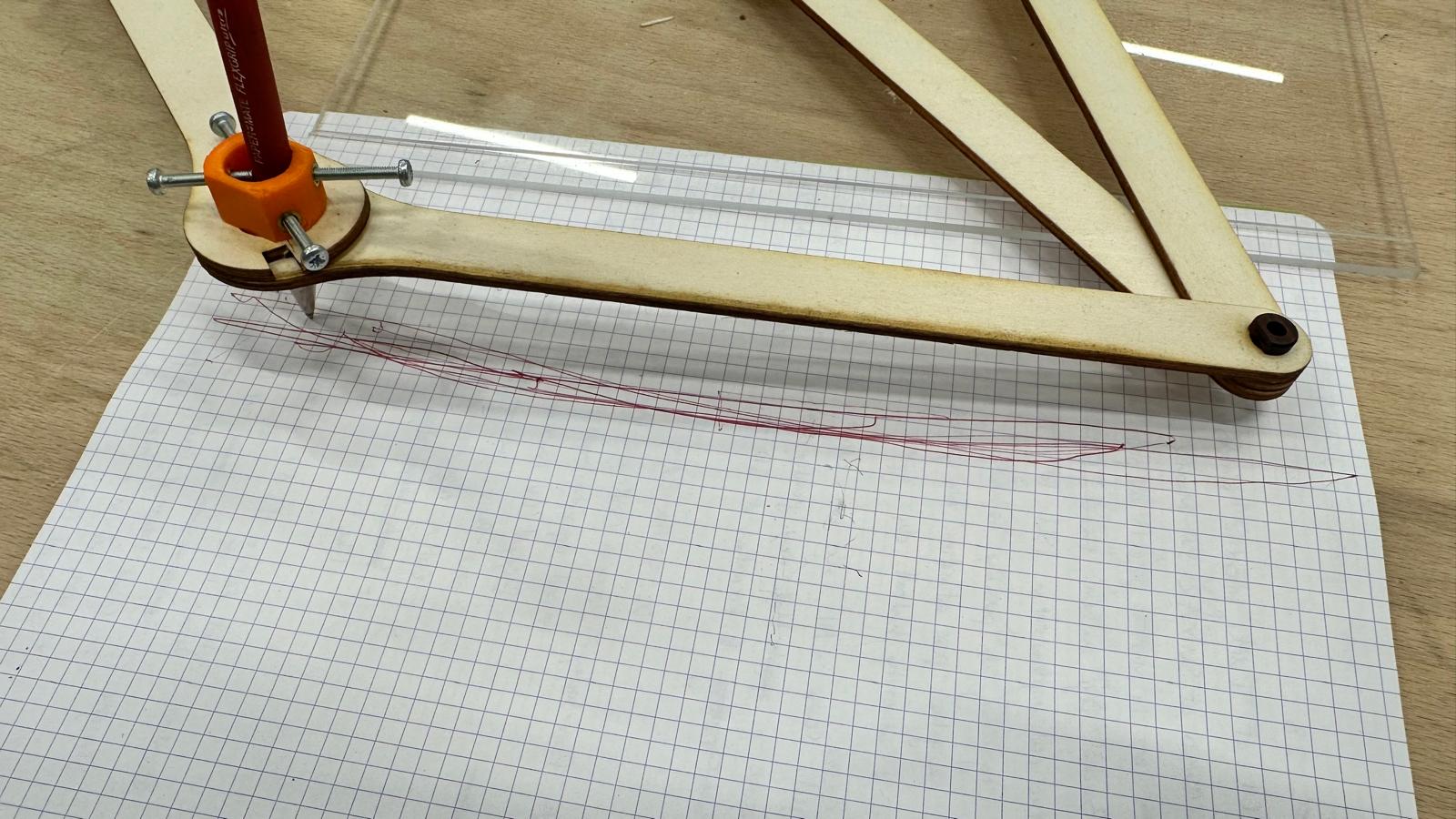](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/whatsapp-image-2026-05-05-at-12-20-45-1.jpeg) ### **Solution : les roulements à billes** [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/whatsapp-image-2026-05-05-at-00-53-41.jpeg)[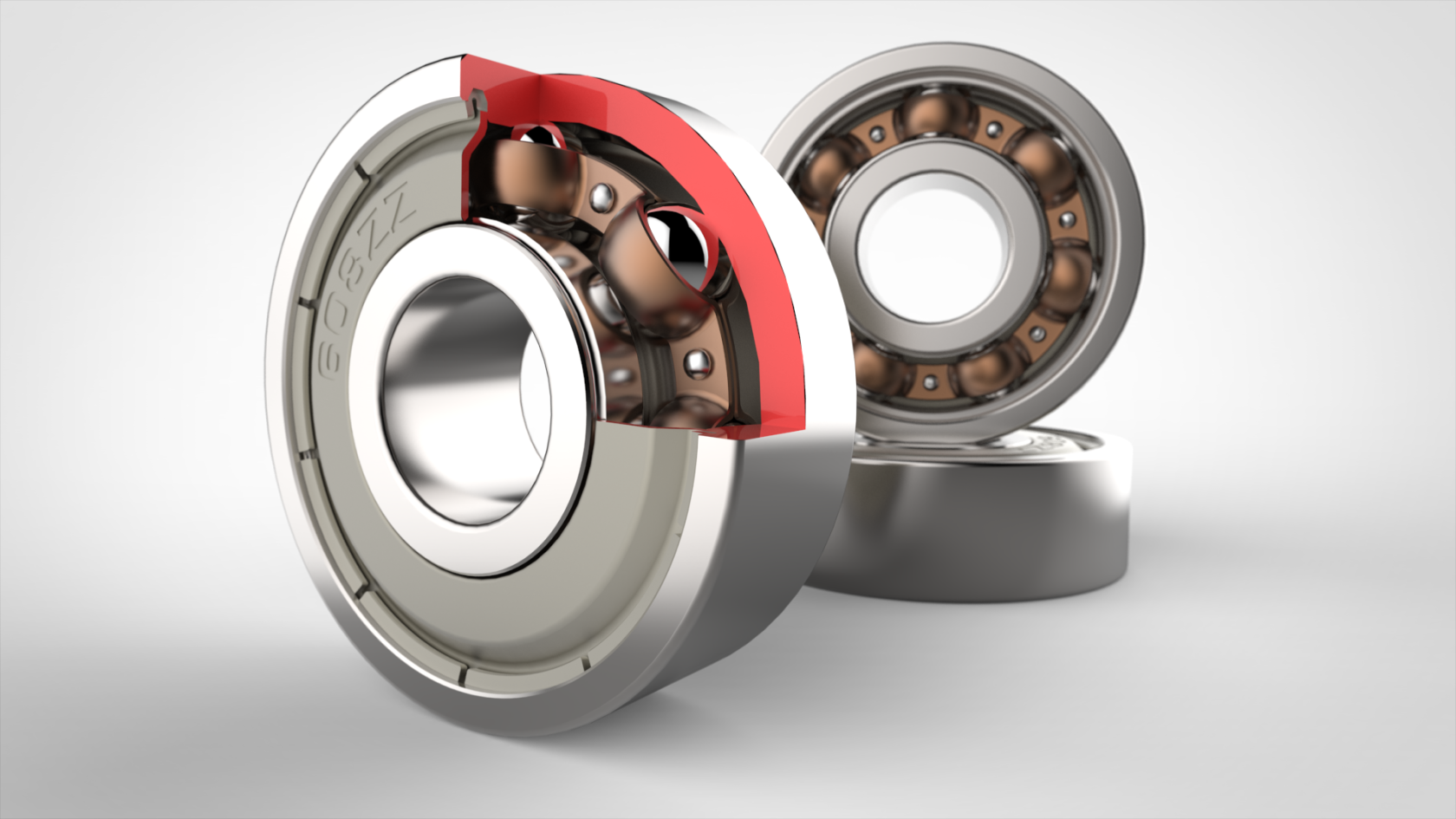](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/tz101.png) L'idée nous est venue à la salle de sport. On regardait les machines fonctionner sous des charges importantes sans vibrer ni avoir de jeu apparent, et on a réalisé qu'elles utilisaient des roulements à billes. Un roulement à billes, c'est une pièce qui permet à deux éléments de tourner l'un par rapport à l'autre grâce à des billes coincées entre une bague intérieure et une bague extérieure.**Résultat** : très peu de frottement, et surtout quasi aucun jeu radial exactement ce dont on avait besoin.
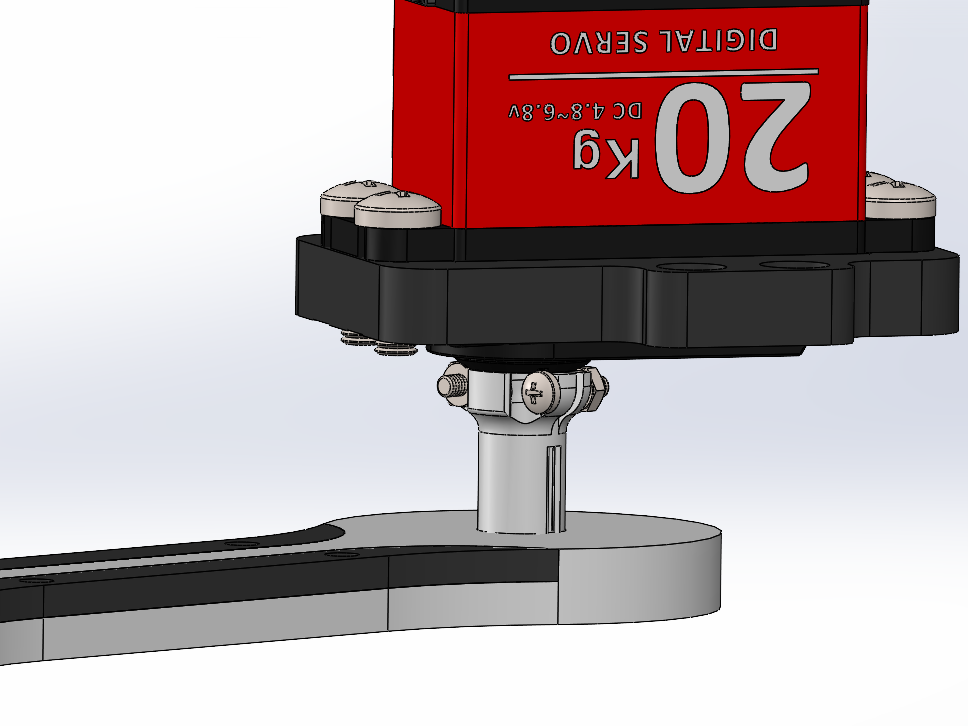
#### Conception des supports de roulement Pour que les roulements soient maintenus correctement, on a conçu une pièce qui appuie en permanence sur les deux bagues du roulement, comme un petit effet ressort, pour supprimer tout jeu. On a imprimé plusieurs versions avec des diamètres légèrement différents *(21,00 / 21,25 / 21,50 / 21,75 / 22,00 mm)* pour trouver le bon compromis entre assemblabilité et absence de jeu. On a utilisé des roulements **608ZZ**. [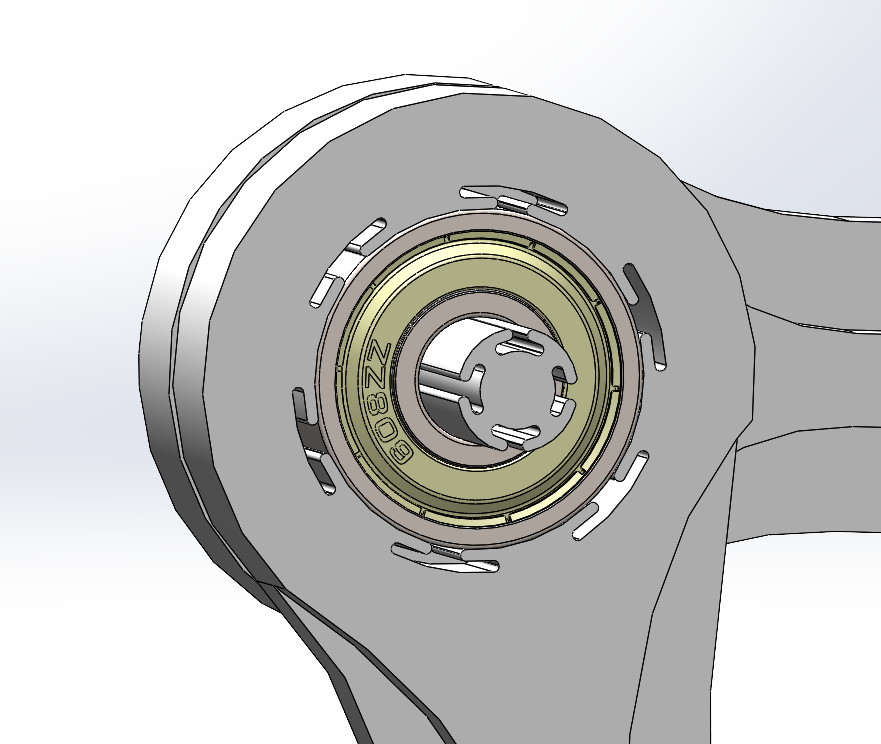](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/screenshot-2026-05-05-010506.png)[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/OkZwhatsapp-image-2026-05-05-at-01-08-29.jpeg) #### Reconstruction du mécanisme Une fois qu'on avait trouvé les bonnes cotes, on a reconstruit tout le mécanisme avec les roulements à billes à chaque articulation. La géométrie reste exactement la même que pour la preuve de concept, seules les jonctions entre axes ont changé. [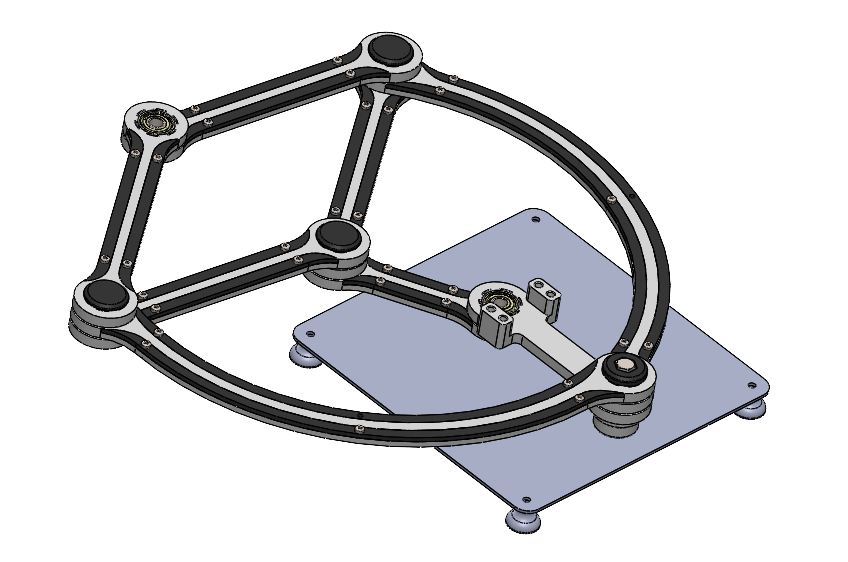](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/yhRimage.png) #### Intégration du servomoteur Pour faire tourner le mécanisme, on a intégré un **servomoteur digital 20 kg** (*DC 4,8–6,8 V*). Cette partie a demandé de résoudre deux problèmes séparément :**Fixer le moteur à la base :** On a designé un support moteur imprimé en 3D qui vient entourer le servo. Pour le maintenir, on a utilisé la technique du **boulon noyé** on noie un écrou dans la pièce pendant l'impression pour pouvoir visser directement dedans. Ce support est ensuite fixé à la tige fixe du mécanisme via des inserts filetés.
[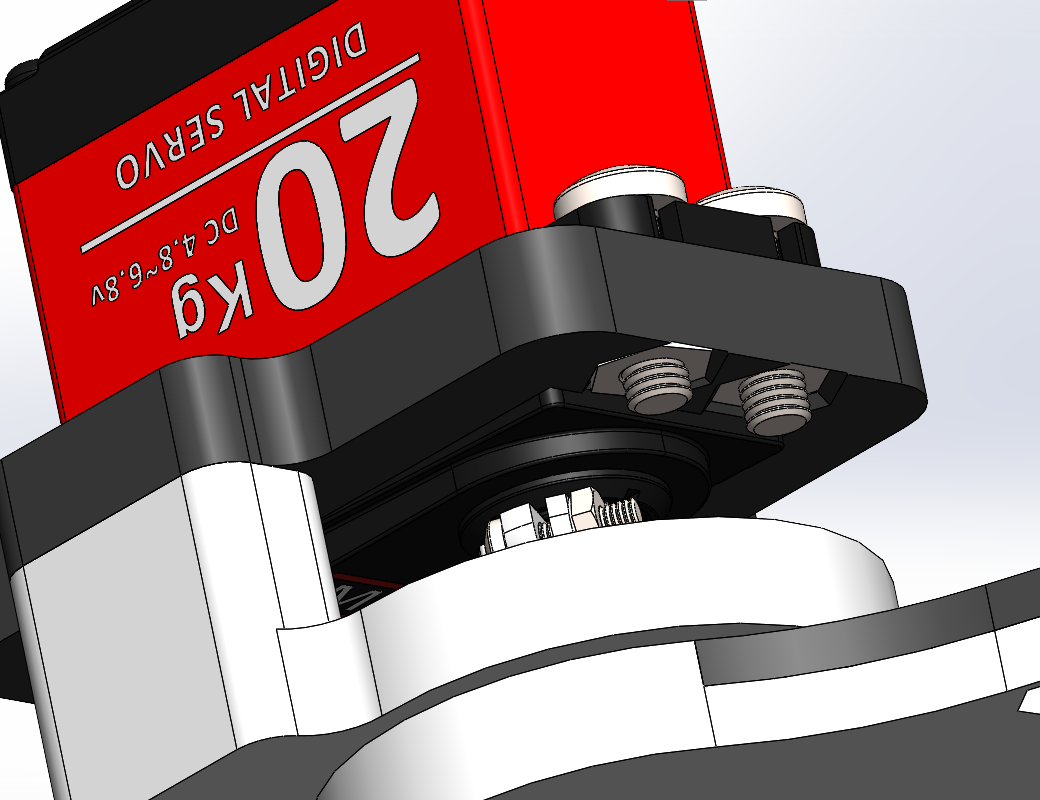](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/screenshot-2026-05-05-013117.png)[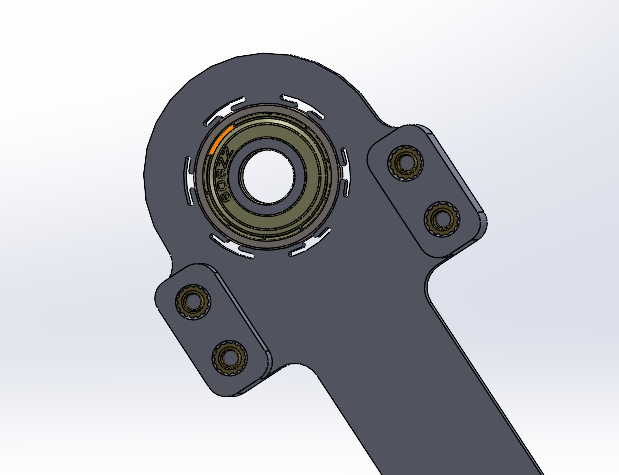](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/screenshot-2026-05-05-012751.png)**Transmettre le mouvement :** La pièce la plus difficile à concevoir, c'est celle qui fait le lien entre l'arbre du moteur et la tige mobile. Il fallait qu'elle se fixe sans jeu sur l'arbre du servo, qu'elle transmette correctement le couple, et qu'elle soit à la fois petite et solide. La solution finale se serre sur l'arbre avec une vis et un boulon, et s'encastre directement dans la tige mobile.
[](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/screenshot-2026-05-05-014057.png) Un premier problème qu'on a eu : la pièce cassait pendant les tests. En fait, on l'avait imprimée à la verticale, donc les couches d'impression étaient parallèles à l'effort de rotation et c'est précisément là que ça cassait. En la réimprimant **à plat**, les couches sont perpendiculaires à l'effort, et là ça a tenu sans problème. [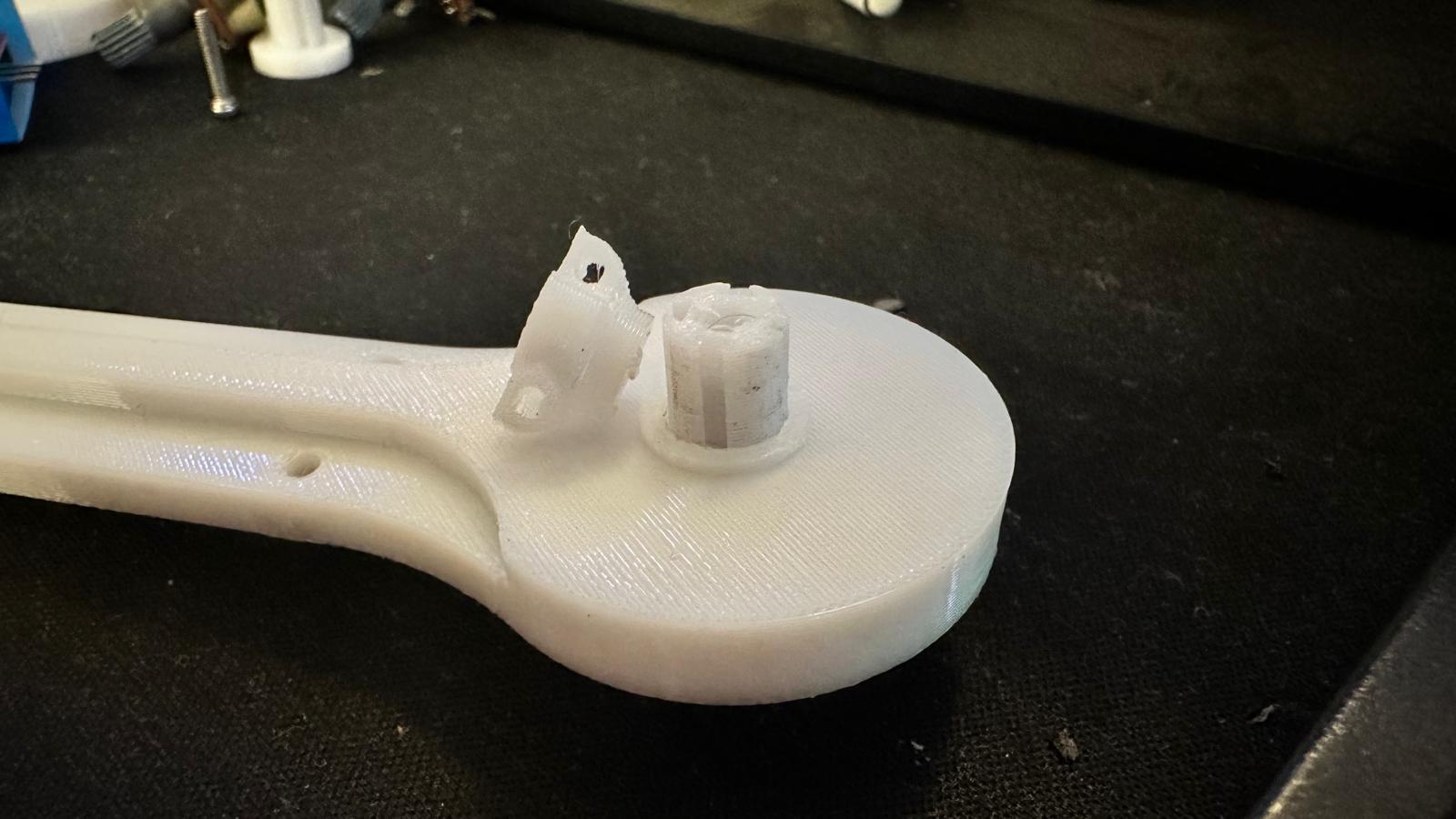](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/whatsapp-image-2026-05-05-at-01-35-46.jpeg)[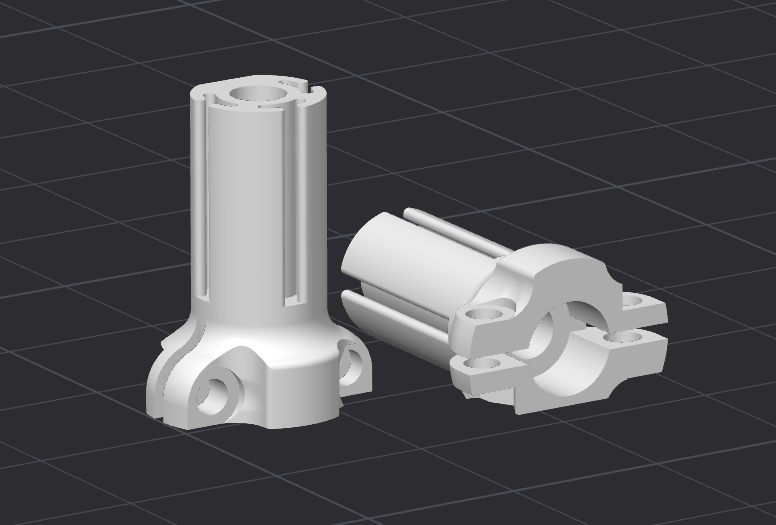](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/screenshot-2026-05-05-014624.png) ### **Design final mécanique** Voici le rendu SolidWorks final de la partie mécanique : le servomoteur sur son support central, le mécanisme complet avec les roulements à chaque nœud, et la tige terminale pour accueillir le stylo. [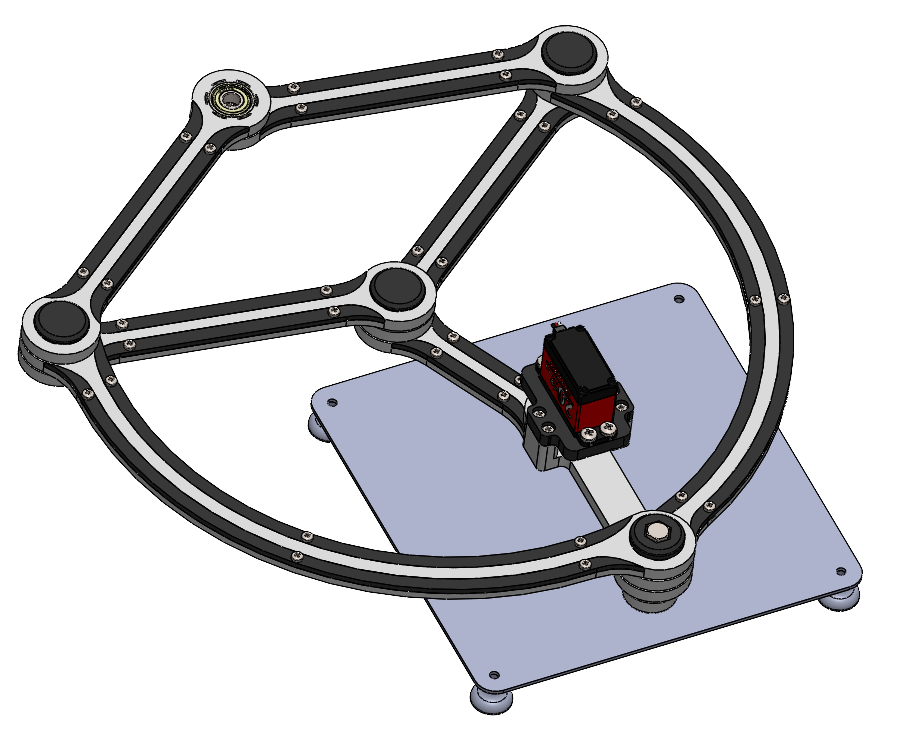](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/Ie9image.png) ### **Partie électronique** #### Architecture du système On a utilisé un **Arduino UNO R4** comme microcontrôleur, avec : - Un **potentiomètre** (A5) pour contrôler l'angle du servo manuellement - Un **écran LCD I2C** 16×2 (SDA-A4/SCL-A5) pour afficher l'angle en temps réel - Un **interrupteur à clé** (pin 7) pour allumer/éteindre le système (ajouté pour le fun) - Le **servomoteur** (pin 9) #### [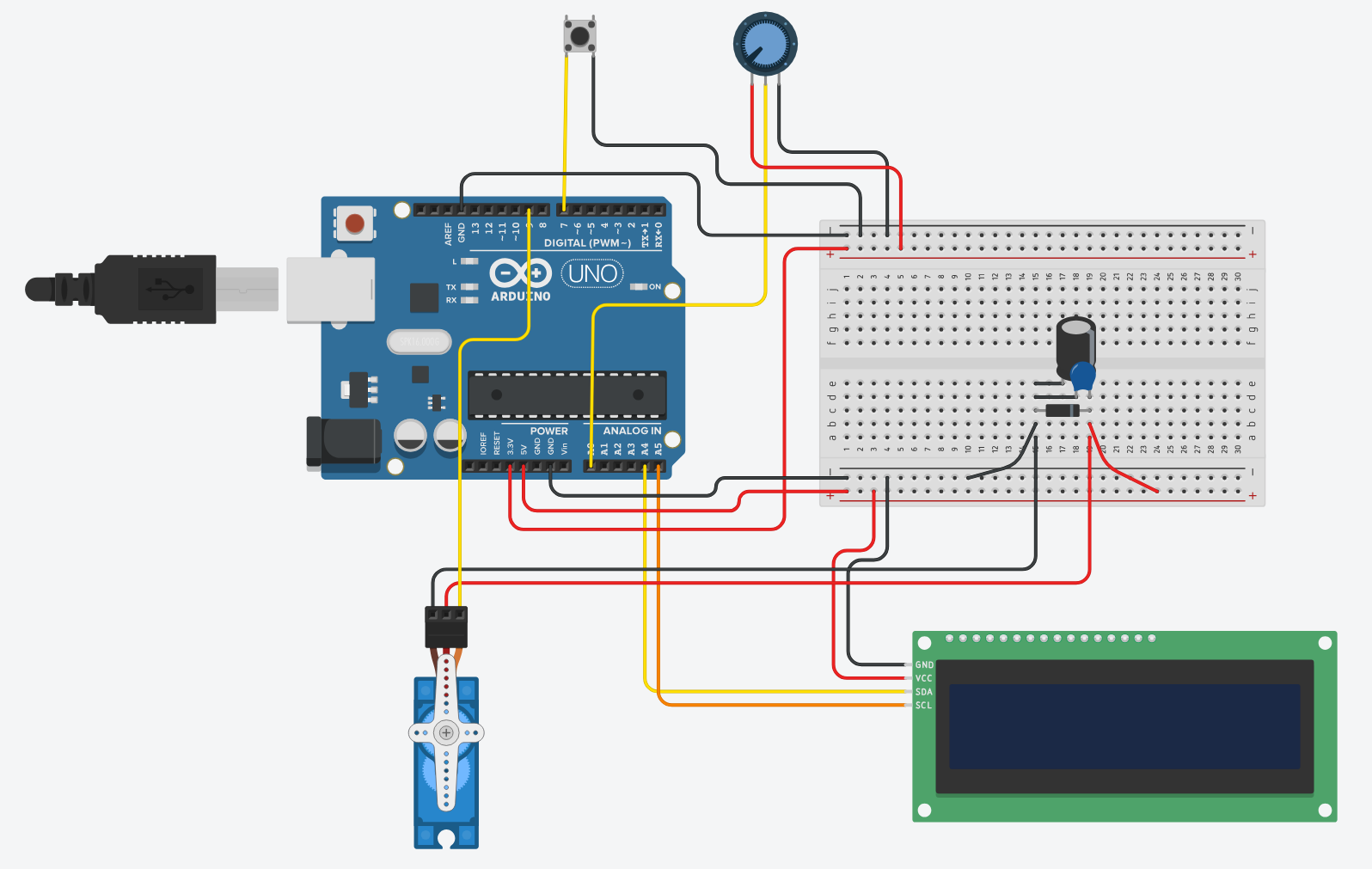](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/Tg8image.png) #### Composants de filtrage et protection On a ajouté quelques composants passifs pour rendre le circuit plus stable.Une **diode de roue libre** protège l'Arduino des pics de tension inverse que peut générer le servo quand il change de sens.
Un **condensateur électrolytique** (~100–470 µF) sur la ligne d'alimentation du servo lisse les appels de courant au démarrage et évite les resets intempestifs de l'Arduino.
Un **condensateur céramique** (~100 nF) en parallèle filtre les parasites haute fréquence.
#### Boîtier électronique Pour ranger proprement tout l'électronique, on a découpé au laser une boîte en contreplaqué. Le panneau avant est incliné et accueille l'écran LCD (fixé par quatre vis), le potentiomètre est accessible sur le côté, et le bouton-clé est monté en façade. Les assemblages en finger joints assurent la rigidité de l'ensemble. [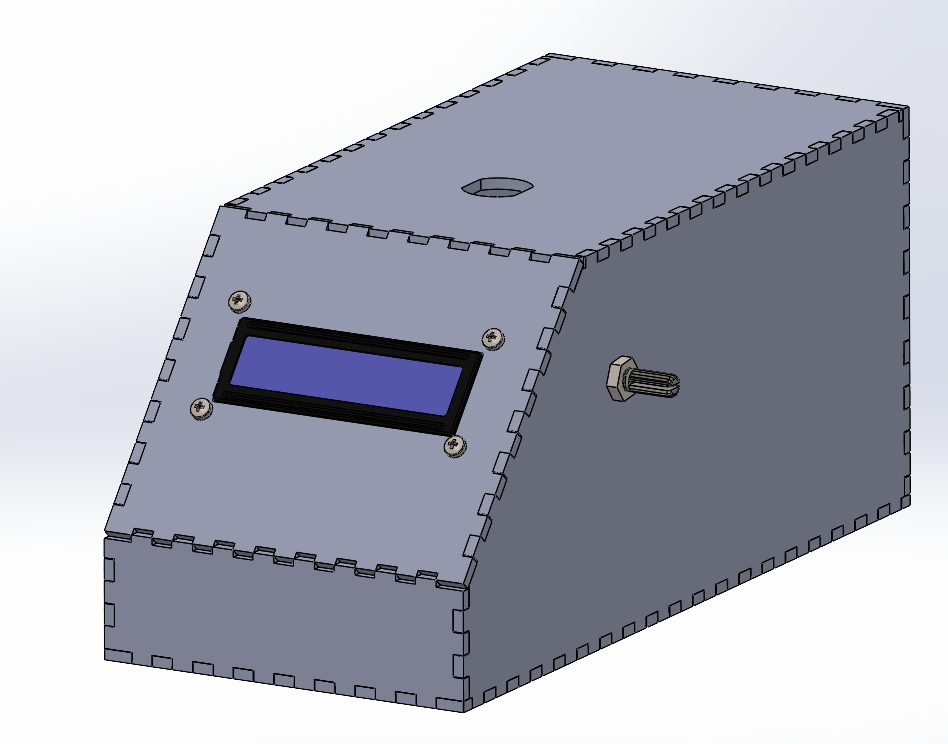](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/screenshot-2026-05-05-024148.png) [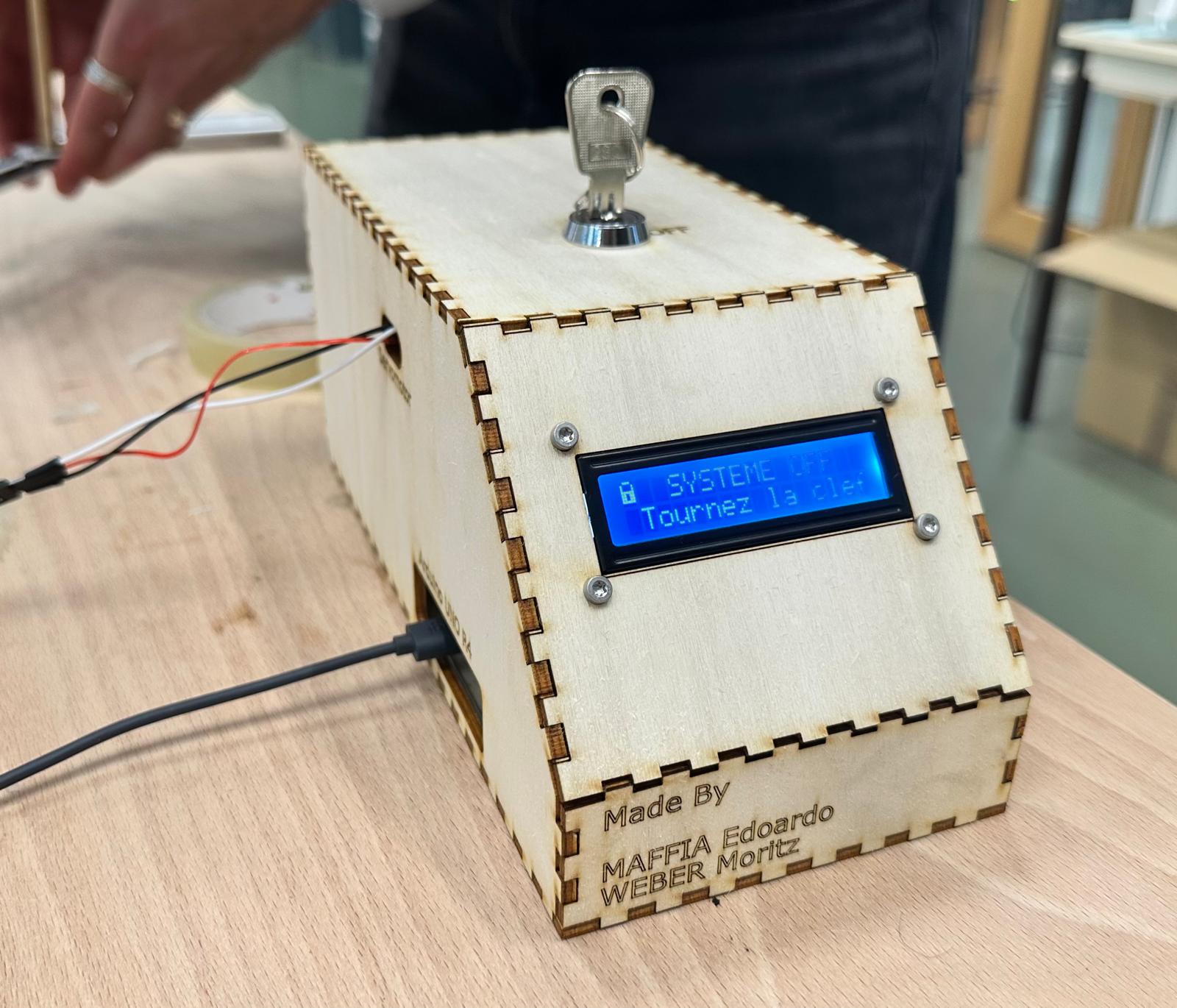](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/ypgwhatsapp-image-2026-05-05-at-12-20-45-2.jpeg) ### **Résultats et améliorations** [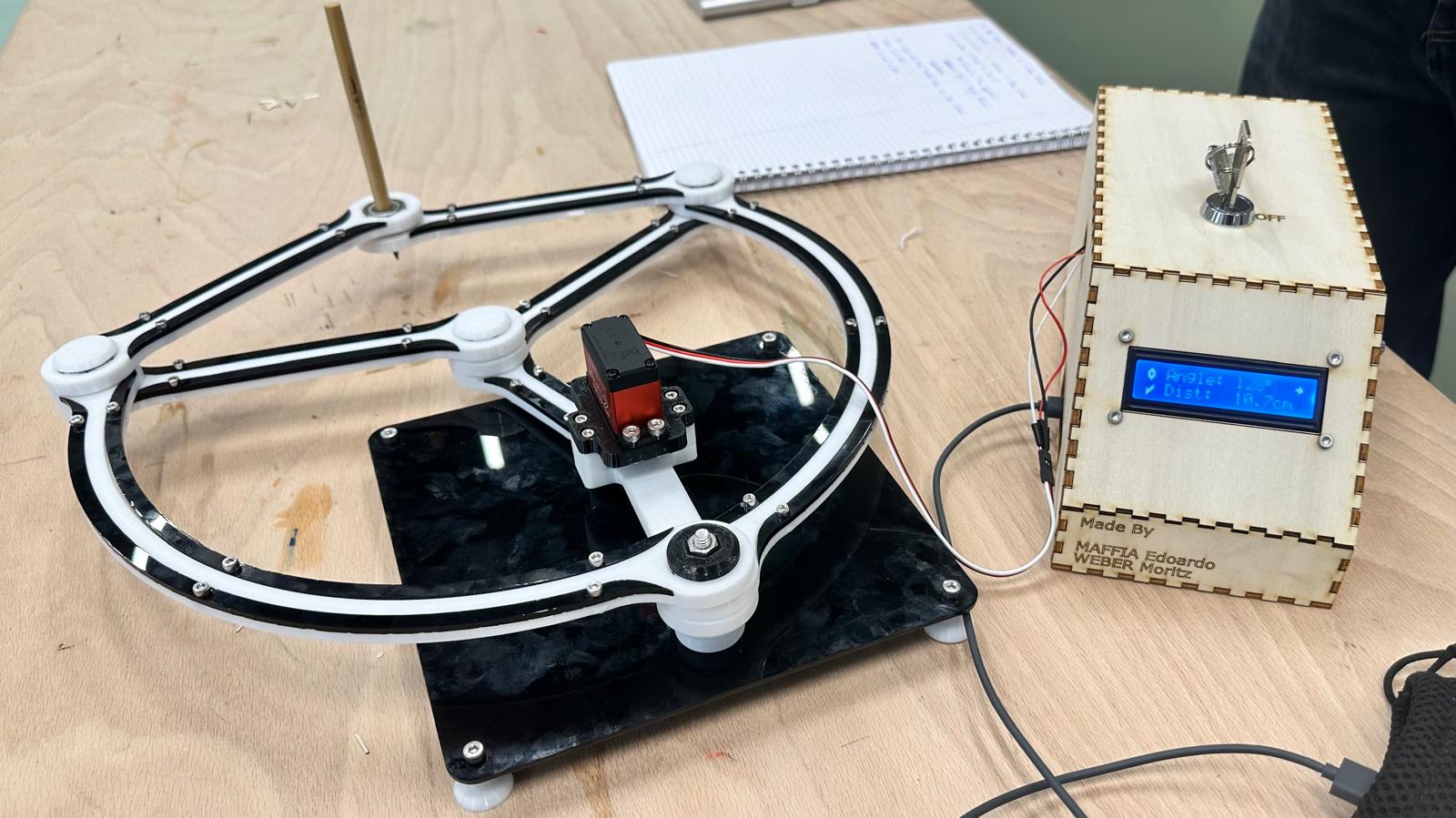](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/whatsapp-image-2026-05-05-at-12-20-44.jpeg) #### Bilan Les résultats sont **bien meilleurs** qu'avec la preuve de concept. Les traits sont beaucoup plus droits, les vibrations ont clairement diminué, et le mécanisme tourne nettement plus facilement. Il reste quand même un peu de jeu au niveau de l'organe terminal la fixation du stylo ce qui nuit encore légèrement à la précision du tracé (+-2 mm). [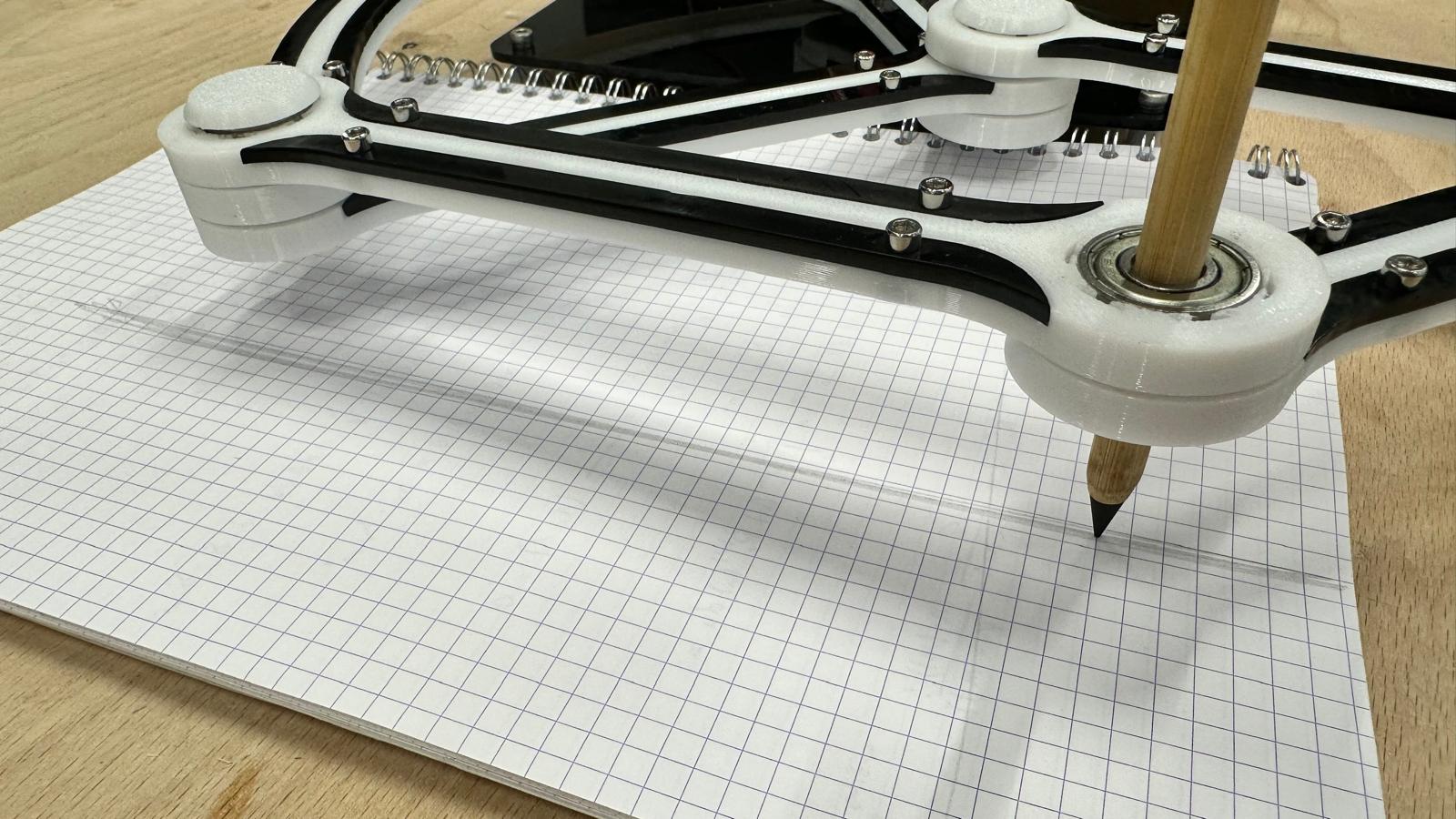](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/whatsapp-image-2026-05-05-at-12-38-33.jpeg) #### Ce qu'on améliorerait**Électronique :** Passer d'une breadboard à un **PCB dédié** pour éviter les courts-circuits et avoir un montage plus propre et fiable
**Motorisation :** Utiliser un **moteur pas à pas** plutôt qu'un servo, pour un contrôle angulaire plus précis et sans dérive
**Organe terminal :** Trouver un système de fixation rigide pour le stylo afin d'éliminer le jeu restant et avoir un tracé vraiment propre
### Fichiers et Documentation Pour celles et ceux qui souhaitent aller plus loin, consulter le code source ou contribuer, notre travail est disponible sur GitHub. Vous pouvez y retrouver l’ensemble des ressources, de la documentation ainsi que les différentes versions du projet : 👉 [Edoardo-Maffia03/Mecanisme-de-Peaucellier-Lipkin](https://github.com/Edoardo-Maffia03/Mecanisme-de-Peaucellier-Lipkin) [](https://wiki.fablab.sorbonne-universite.fr/BookStack/uploads/images/gallery/2026-05/lHrframe.png) N’hésitez pas à parcourir le dépôt, proposer des améliorations ou simplement découvrir les coulisses de notre réalisation. # Smart Wi-Fi RC Car : Intégration Mécatronique Multimodale ### Conception hybride (Impression 3D & Laser) pilotée par ESP32: #### 1. Présentation du Projet Ce projet final consiste en la création d'un véhicule robotisé autonome, pilotable via n'importe quel ordinateur connecté au même réseau Wi-Fi. L'originalité du projet réside dans sa structure hybride : un châssis technique imprimé en 3D et une carrosserie structurelle découpée au laser.| **Domaine d'Application** | **Machine / Outil** | **Logiciel** |
| **Impression 3D** | Prusa MK4S | SolidWorks / PrusaSlicer |
| **Découpe Laser** | Trotec Speedy 360 | Inkscape / SolidWorks |
| **Électronique** | ESP32 & L298N | Arduino IDE |
| **Date** | **Activité** |
| **7 avril** | Initialisation et présentation des consignes |
| **14 avril** | Réflexion sur le projet et répartition des rôles |
| **22 avril** | Retrouvailles pour concevoir les pièces sur SolidWorks |
| **29 avril** | Retrouvailles au Fablab pour imprimer et découper le 1er batch |
| **4 mai** | Retrouvailles au Fablab pour imprimer et découper le 2e batch |
| **Part Category** | **Infill Percentage** | **Perimeter Count** | **Engineering Purpose** |
| **Bodywork & Wings** | 5% | 2 | Weight reduction & low center of gravity. |
| **Tires** | 10% | 3 | Surface durability & weight balance. |
| **Rims** | 20% | 5 | Structural support for center-lock hubs. |
| **Mechanisms & Axles** | 30% - 40% | 5 | Impact resistance & thread durability. |