Mélissa Marty
Modèle de documentation à remplir
Nom du projet : Puppy pot
Coordonnées :
- Nom / Prénom : Marty Mélissa
- Adresse mail : Melissa.Marty@etu.sorbonne-universite.fr
- Cursus : Master 1 Management de l’innovation
Introduction
- Date de début : 14/01/2026
- Date de fin estimée : 14/01/2026
- Objectifs : Découvrir le logiciel PrusaSlicer, apprendre à paramétrer un fichier G-code et préparer l'impression d'un objet complexe/utile.
- Contexte : Première séance de prise en main des machines du Fablab et choix d'un modèle sur Printables.
Matériaux / Outils / Machines
- Logiciels : PrusaSlicer (pour le découpage/slicing)
- Plateforme : Printables (pour trouver le modèle 3D)
- Imprimante prévue : Imprimante FDM (type Prusa i3 MK3S+ ou MK4)
- Matériau prévu : PLA (Diamètre 1,75 mm)
- Outils de finition : Spatule (pour le décollage futur)
-> Première séance du vendredi 16 décembre 2025 : Découverte des outils à impression 3D (PrusaSlicer)
Séance découverte de l'usage de l'impression 3D et de comment imprimer des modèles. Découverte du logiciel PrusaSlicer et importation d'un objet via printable du logiciel 3D afin d'imprimer un objet. L’objectif de la première séance était de découvrir le FABLAB et les bases de l’impression 3D à travers le logiciel PrusaSlicer et les imprimantes Prusa MK4S.
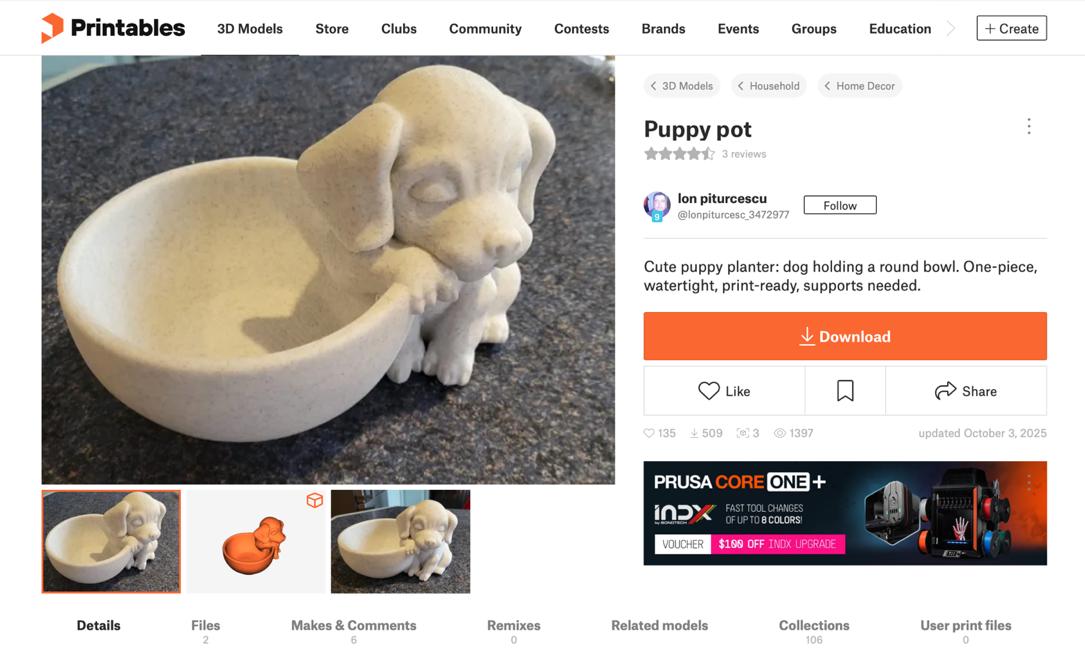
Pour cette toute première impression, j’ai choisi d’imprimer un objet qui représente un chien accroché à un pot à partir d’un fichier STL disponible directement sur le site web printables.com.
Voici le modèle que j’ai choisi sur le site printables.com :
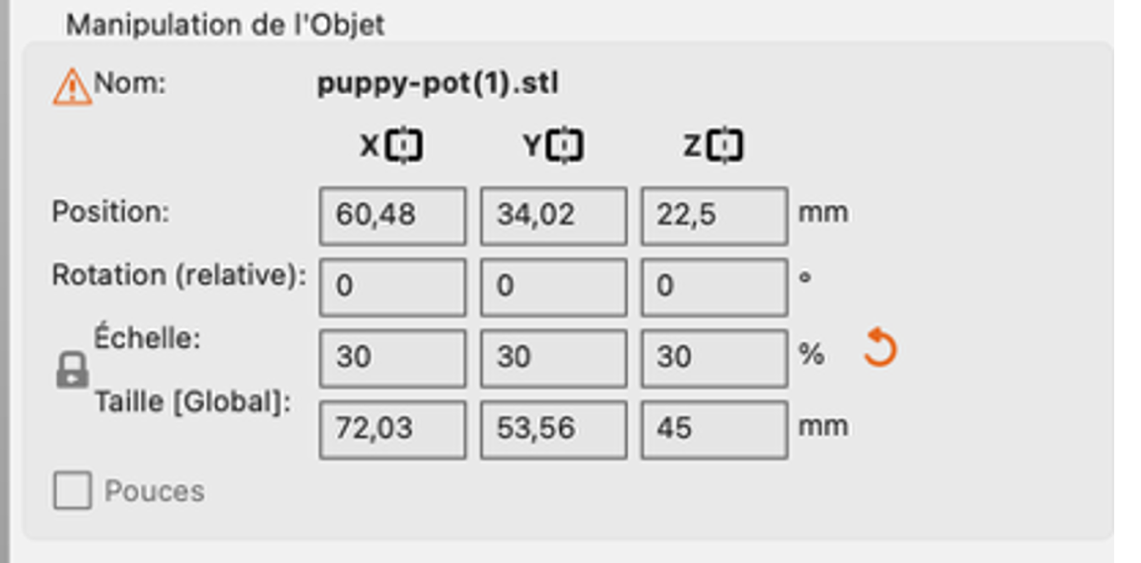
Note importante : J’ai ensuite importer le fichier STL sur PrusaSlicer afin de modifier et d’ajuster les paramètres tels que la taille et le temps d’impression, puis j’ai exporter le fichier en G code pour débuter l’impression.
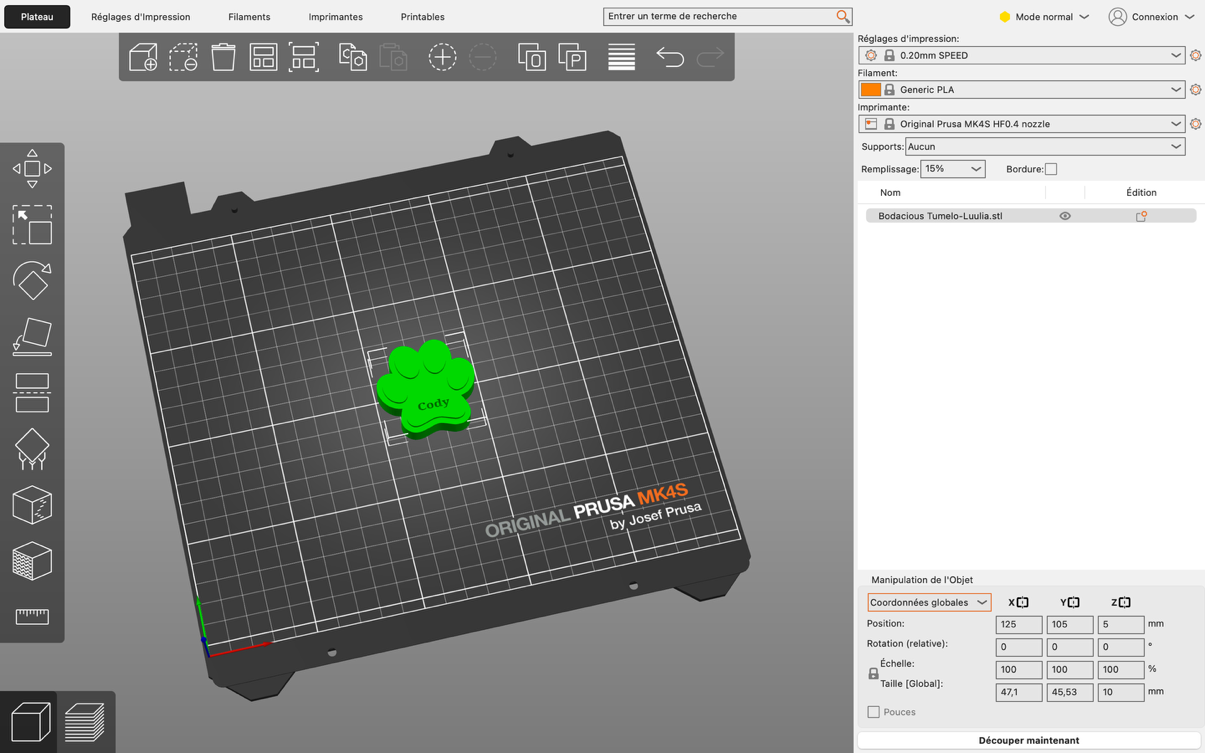
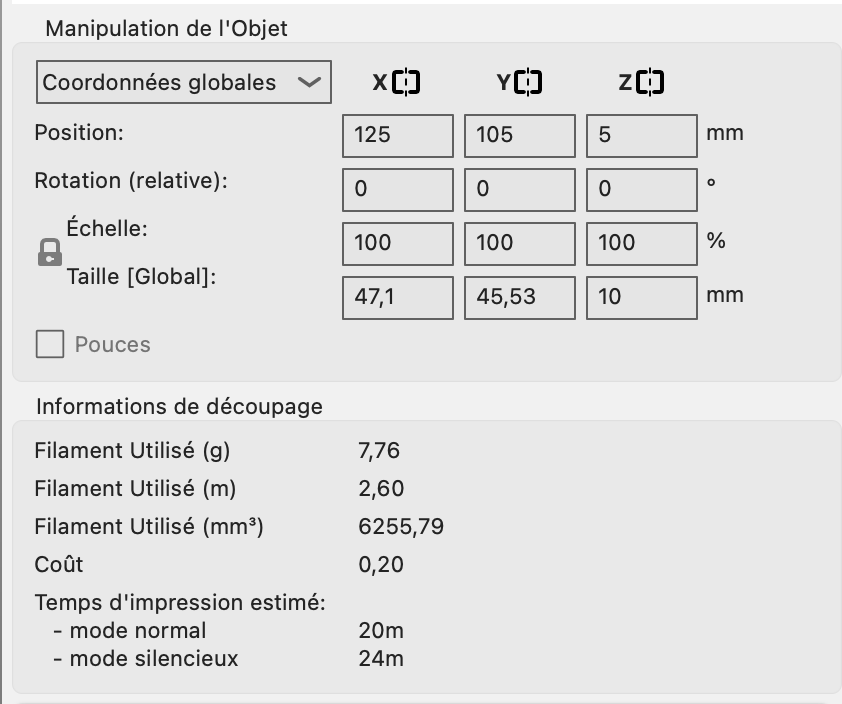
Paramètres de l’objet : J'ai modifié les paramètres avec les dimensions que je souhaitais
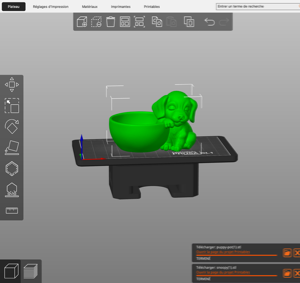
Visualisation avant impression :
Résultat :


Analyse de l’objet après impression : On observe une difficulté de post-traitement au niveau de la face inférieure. Les structures de support présentent une adhérence excessive à la pièce, rendant leur retrait manuel incomplet sans risquer d'endommager l'état de surface de l'objet.
De plus, sous l'oreille du chien, on note un léger affaissement de la matière. Ce défaut esthétique est lié à une zone en surplomb trop importante où le filament a refroidi dans le vide avant de se fixer, créant des résidus de matière difficiles à extraire.
Enfin, on observe qu’à l'intérieur du pot, l'état de surface n'est pas parfaitement lisse. On constate des artefacts d'impression sous forme de vagues. Cela est généralement dû aux vibrations mécaniques de l'imprimante lors des changements de direction rapides de la tête d'impression.
Journal de bord résumé :
14/01/2026 :
Conclusion :
Cette étape m'a permis de comprendre que la préparation logicielle est aussi importante que l'impression elle-même. J'ai pu observer comment les couches se sont superposer au cours de l’impression.
-> Deuxième séance du 9 janvier 2026 :
Contexte : Dans le cadre de l'UE Processus d'Innovation, nous devons concevoir un objet plus "compliqué" à coder et à imprimer.
Objectifs :
- Concevoir un magnet en forme de patte de chien
- Approfondir le processus de création d’un objet en impression 3D
- Utiliser un logiciel de modélisation 3D

Conception détaillée et intégration fonctionnelle :
1. Modélisation et personnalisation avec logiciel Tinkercad : Le design de la patte de chien a été personnalisé avec deux fonctionnalités spécifiques :
- Gravure débouchante : Le texte "CODY" a été intégré en utilisant une fonction de retrait de matière (perçage). Les lettres sont extrudées négativement à travers la pièce, créant un lettrage ajouré.
- Logement pour aimant : À l'arrière de l'objet, j'ai conçu une cavité circulaire destinée à recevoir un aimant.
2. Métrologie et ajustement : Pour garantir l'insertion de l'aimant, j'ai procédé à une étape de métrologie :
- Mesure précise : À l'aide d'un pied à coulisse, l'aimant a été mesuré avec une précision au centième (diamètre de 8,04 mm et épaisseur de 1,29 mm).
- Gestion des tolérances : Pour que l'aimant rentre bien dans son emplacement, j'ai fait le trou un peu plus large sur Tinkercad (environ 0.1 ou 0.2 mm de plus). C’est ce qu’on appelle une marge de sécurité (ou tolérance). En effet, à l'impression, le plastique a tendance à s'étaler un peu ou à rétrécir en refroidissant. Sans cette marge, le trou aurait été trop petit et l'aimant n'aurait pas pu rentrer.


Phase de préparation et impression (Slicing) :
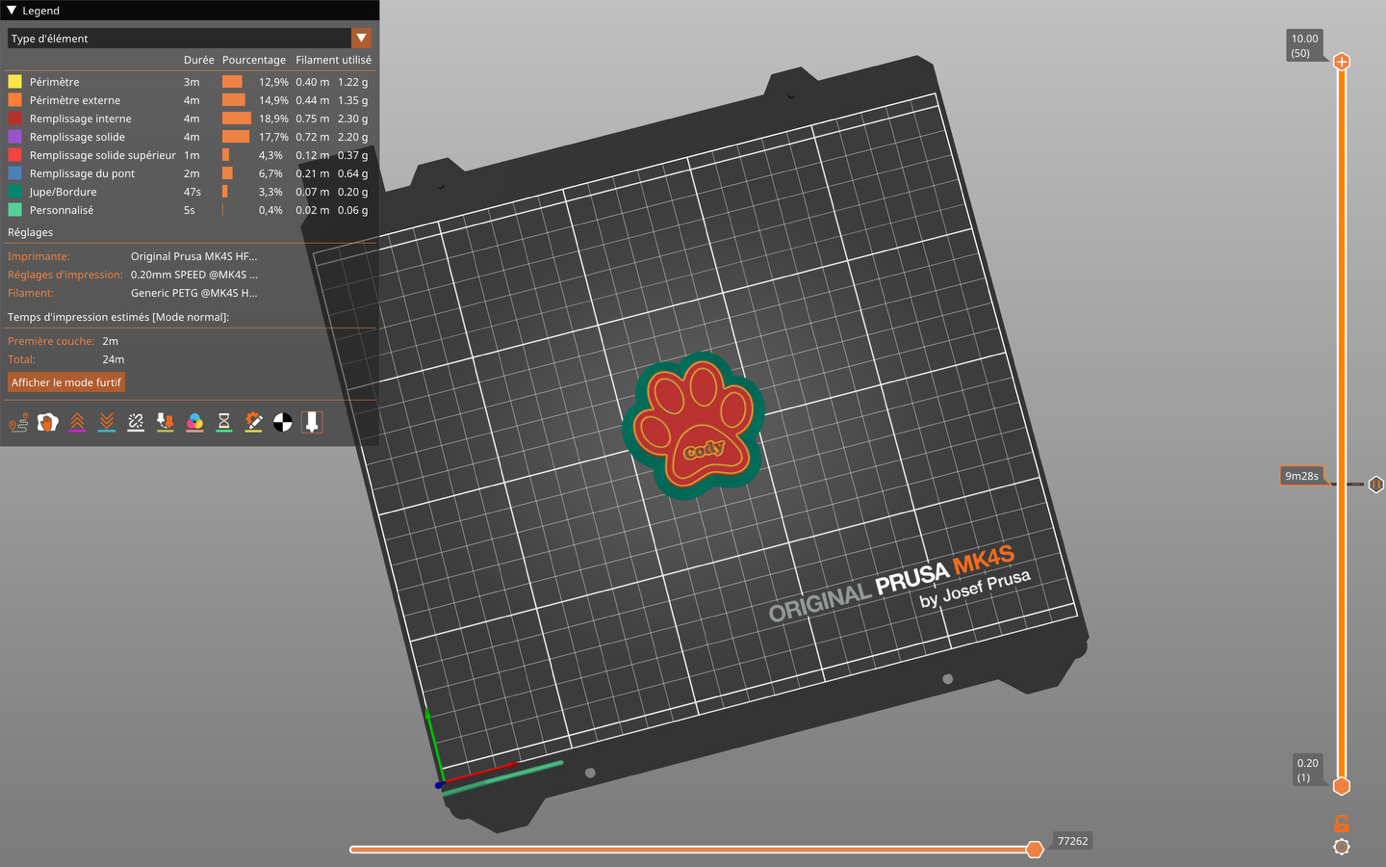
1. Importation et configuration : Après avoir exporté mon design de Tinkercad au format STL, je l'ai importé dans le logiciel PrusaSlicer. J'ai ajusté les paramètres de remplissage et la hauteur des couches pour assurer la solidité de la patte de chien.
2. Insertion de l'aimant (Pause programmée) : Pour que l'aimant soit totalement intégré à l'intérieur de la pièce, j'ai utilisé une fonction spécifique dans le logiciel de découpe :
- Grâce à la barre de visualisation des couches (à droite de l'écran), j'ai repéré la hauteur exacte où le trou de l'aimant allait être recouvert par la couche suivante.
- J'ai ajouté une pause de l'impression à ce niveau précis.
- Pendant l'impression : La machine s'est arrêtée toute seule et a déplacé la buse sur le côté. J'ai alors pu déposer l'aimant dans son logement.
- Finalisation : J'ai relancé l'impression, et l'imprimante a "fermé" le trou en imprimant par-dessus l'aimant, le rendant ainsi invisible et parfaitement prisonnier de la pièce.
Analyse de l'échec et itération :
1. Premier essai : Défaut de solidité et d'adhérence. La première impression a échoué car la pièce manquait de solidité. Le remplissage (infill) n'était pas assez dense, ce qui a entraîné une mauvaise liaison entre les couches de plastique. De plus, la pièce n'était pas assez stable sur le plateau, provoquant un défaut au moment de la reprise après la pause.
2. Analyse de la cause : J'ai identifié que le problème venait de deux facteurs techniques :
-
Un remplissage trop faible : Les parois n'avaient pas assez de support interne pour lier correctement les couches entre elles.
-
Un manque d'adhérence au plateau : La base de la pièce n'était pas assez maintenue pour supporter les manipulations lors de l'insertion de l'aimant.



3. Deuxième essai et résolution : Pour la seconde impression, j'ai modifié mes paramètres sur PrusaSlicer pour corriger ces défauts :
-
Augmentation du remplissage : J'ai choisi un taux plus élevé pour renforcer la structure interne et améliorer la liaison entre les couches.
-
Ajout d'un "Radeau" (Raft) : J'ai ajouté deux couches de radeau (une base de plastique imprimée sous la pièce). Cela a permis d'augmenter la surface de contact avec le plateau et de garantir que la pièce reste parfaitement immobile.
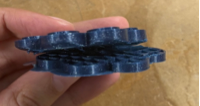
Résultat : Ces corrections ont parfaitement fonctionné. La pièce est solide, l'aimant est bien emprisonné, et il fonctionne parfaitement à travers le plastique.

L'aimantation fonctionne parfaitement à travers la fine couche de plastique supérieure, remplissant ainsi totalement l'objectif fonctionnel de l'objet.

-> Troisième séance du 16 janvier 2026 : Séance d’électronique (avec Sarah AOUCHICHE et Selma SALBAS)
La suite des séances avaient pour but de découvrir le prototypage en utilisant les cartes Arduino.
Plateforme expérimentale : Arduino
Matériel principal : Arduino Uno
1. INTRODUCTION
Cette séance vise l’appropriation d’une plateforme de prototypage microcontrôlée par la mise en œuvre progressive de fonctions fondamentales des systèmes embarqués : génération de sorties numériques, gestion temporelle de l’exécution et interaction capteur–actionneur via acquisition analogique.
Premier prototype :
L’objectif est de mettre en œuvre une sortie logique afin de caractériser la commutation de potentiel sur une broche numérique et sa traduction en signal lumineux.
Dispositif
- Carte Arduino Uno
- LED intégrée (broche numérique 13)
- Environnement Arduino IDE
Code
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
digitalWrite(LED_BUILTIN, HIGH);
delay(1000);
digitalWrite(LED_BUILTIN, LOW);
delay(1000);
}
Modèle de fonctionnement
La broche associée à LED_BUILTIN est configurée en sortie. La boucle principale génère une onde carrée de période 2 s par alternance HIGH/LOW, correspondant à une commutation entre ~5 V et 0 V.
Observation
La LED présente un clignotement périodique stable, validant la correspondance entre état logique et émission lumineuse.
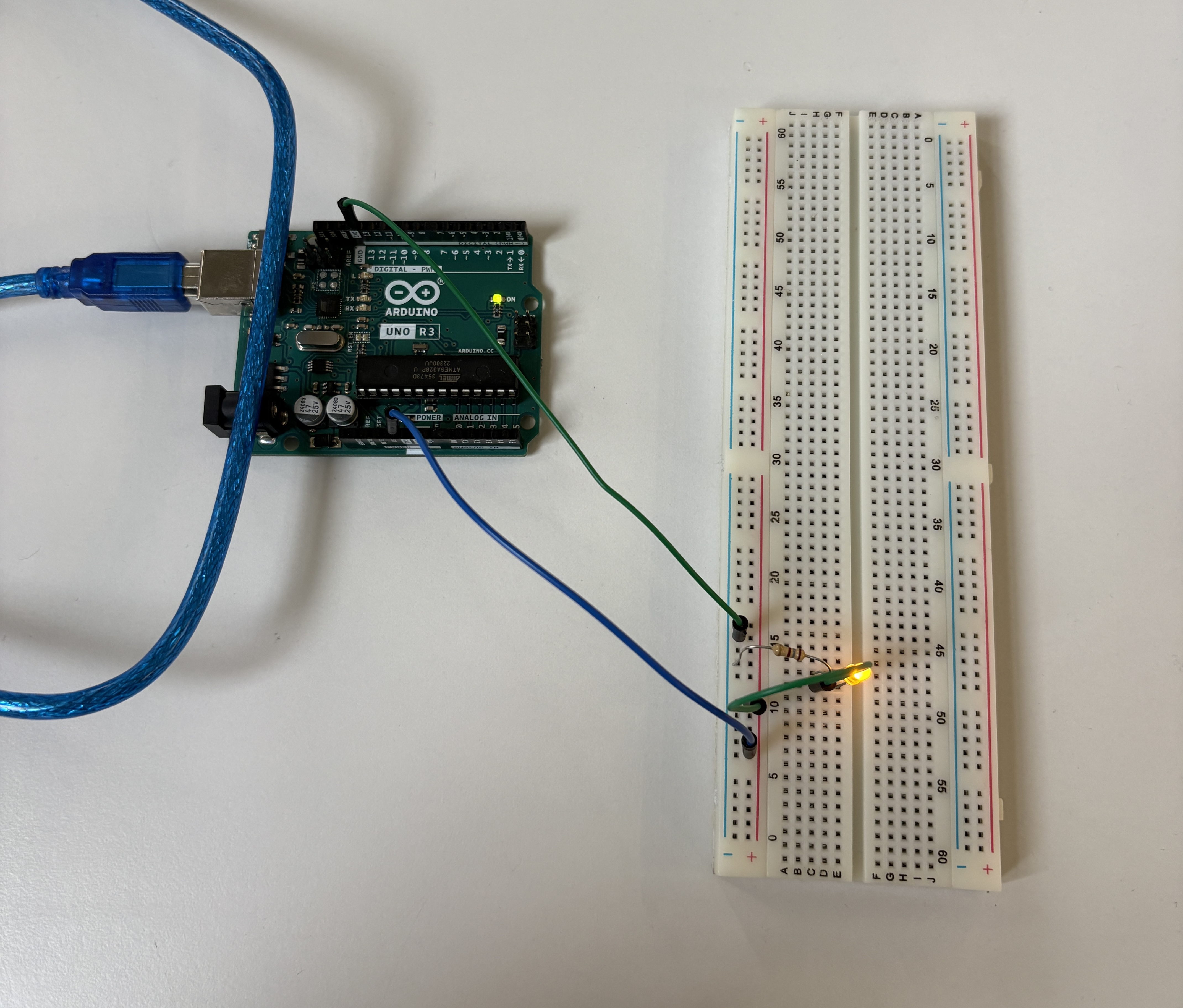
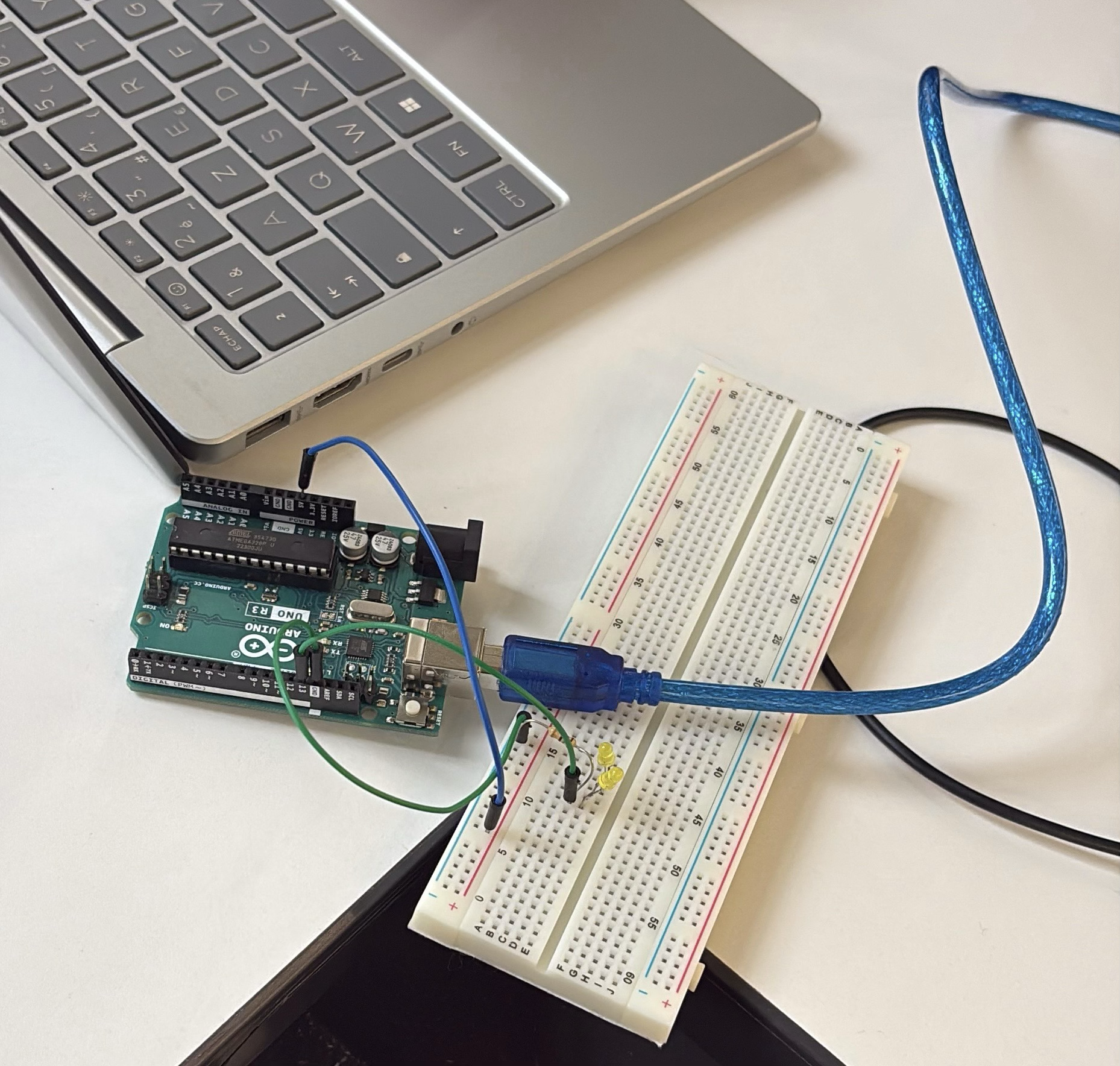
Deuxième prototype :
Dispositif
- Carte Arduino Uno
- Deux LED externes
- Deux résistances de limitation de courant
- Breadboard
Code
void setup() {
pinMode(13, OUTPUT);
pinMode(12, OUTPUT);
}
void loop() {
digitalWrite(13, HIGH);
delay(2000);
digitalWrite(13, LOW);
digitalWrite(12, HIGH);
delay(1000);
digitalWrite(12, LOW);
delay(500);
}
Les deux LED ne clignotent pas de manière indépendante.
Le programme exécute les instructions l’une après l’autre à cause de la fonction delay(), ce qui impose un fonctionnement séquentiel.
Observation :
- Le contrôle de plusieurs LED fonctionne correctement.
- Les délais bloquent l’exécution du programme pendant leur durée.
- Cela montre la limite de cette méthode pour contrôler plusieurs actions en même temps.

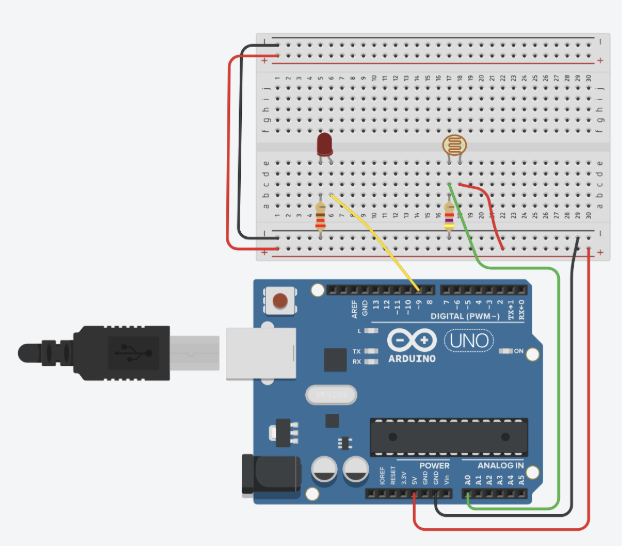
Prototype 3 :
L’objectif est de mettre en œuvre une chaîne d’acquisition analogique et utiliser une grandeur physique (luminosité) comme variable de décision pour le pilotage d’une LED.
Dispositif
- Carte Arduino Uno
- Photo-résistance (LDR)
- Résistance de référence (pont diviseur de tension)
- LED + résistance
- Breadboard
Principe
- Lecture analogique de la tension issue du capteur
- Comparaison à un seuil expérimental
- Activation ou désactivation de la LED selon la condition lumineuse
Code
int capteur = A0; // entrée analogique de la photorésistance
int led = 13; // LED (interne ou externe)
int seuil = 500; // seuil de luminosité (à ajuster)
void setup() {
pinMode(led, OUTPUT);
Serial.begin(9600); // pour voir les valeurs mesurées
}
void loop() {
int valeur = analogRead(capteur); // lecture du capteur
Serial.println(valeur);
if (valeur < seuil) {
digitalWrite(led, HIGH); // sombre → LED allumée
} else {
digitalWrite(led, LOW); // lumineux → LED éteinte
}
delay(200);
}
Observation
La variation d’éclairement modifie continûment la valeur mesurée ; la LED change d’état lorsque le seuil est franchi, établissant une boucle perception–décision–action.
Les résultats obtenus lors de ces exercices mettent en évidence la correspondance entre modèle logiciel et comportement matériel. L’usage de temporisations bloquantes simplifie l’implémentation mais limite l’indépendance temporelle des actionneurs. L’intégration d’un capteur analogique démontre la capacité du système à fermer une boucle de contrôle élémentaire dépendante de l’environnement.