Prometheus
L'objectif du projet Prometheus est de construire une fusée expérimentale dotée d'un système actif anti-roulis pour la compétition nationale C’space organisée en collaboration avec le CNES.
Description détaillé du projet
Intro:
Lors d’un vol, peu importe du régime, que ce soit supersonique ou subsonique, une fusée subit des forces qui la font tourner autour de son axe à grande vitesse ; le système anti-roulis est un objet circulaire qui sera à l'intérieur de la fusée et tournera dans le sens opposé de cette dernière afin de créer un équilibre inertial, ce qui permettra à la fusée de voler sans rotation, réduisant ainsi les forces de traînée subies par cette dernière.
Le système anti-roulis est très complexe car il nécessite une entrée instantanée d'informations sur l'accélération de la fusée, puis il réagit en conséquence en accélérant ou en décélérant. Avec ce système, la fusée devient plus stable et donc plus sûre et plus rapide, tout en réalisant une meilleure consommation de carburant et une meilleure attitude. Toutes ces raisons nous ont motivés à développer ce système à partir de zéro. La fusée sera construite avec des matériaux modernes, notamment de l'aluminium, de la fibre de carbone et du plastique recyclé pour les pièces en 3D.
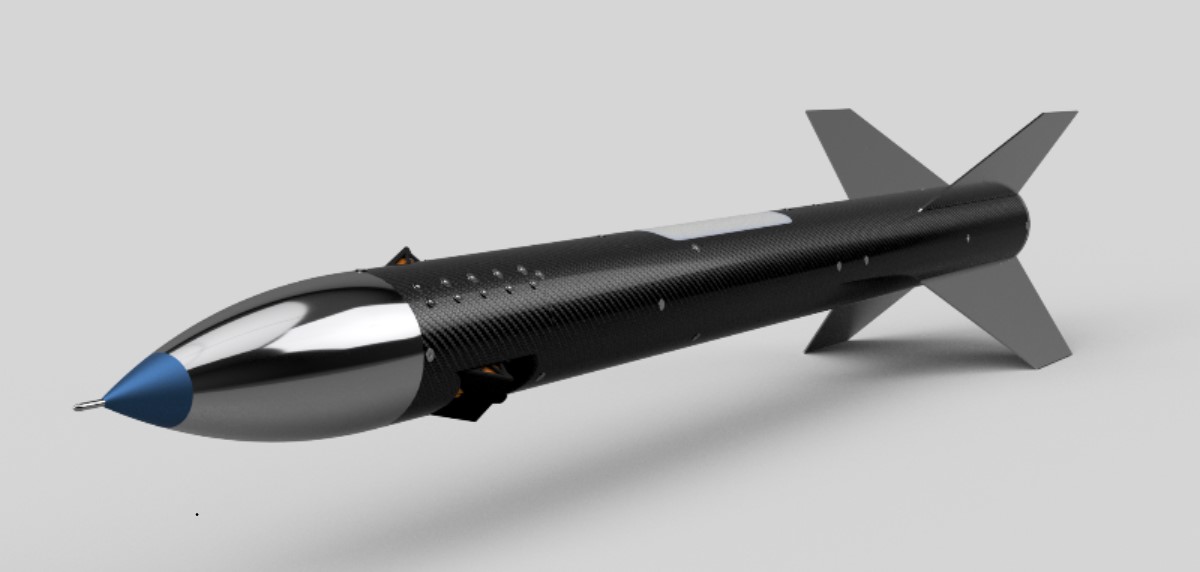
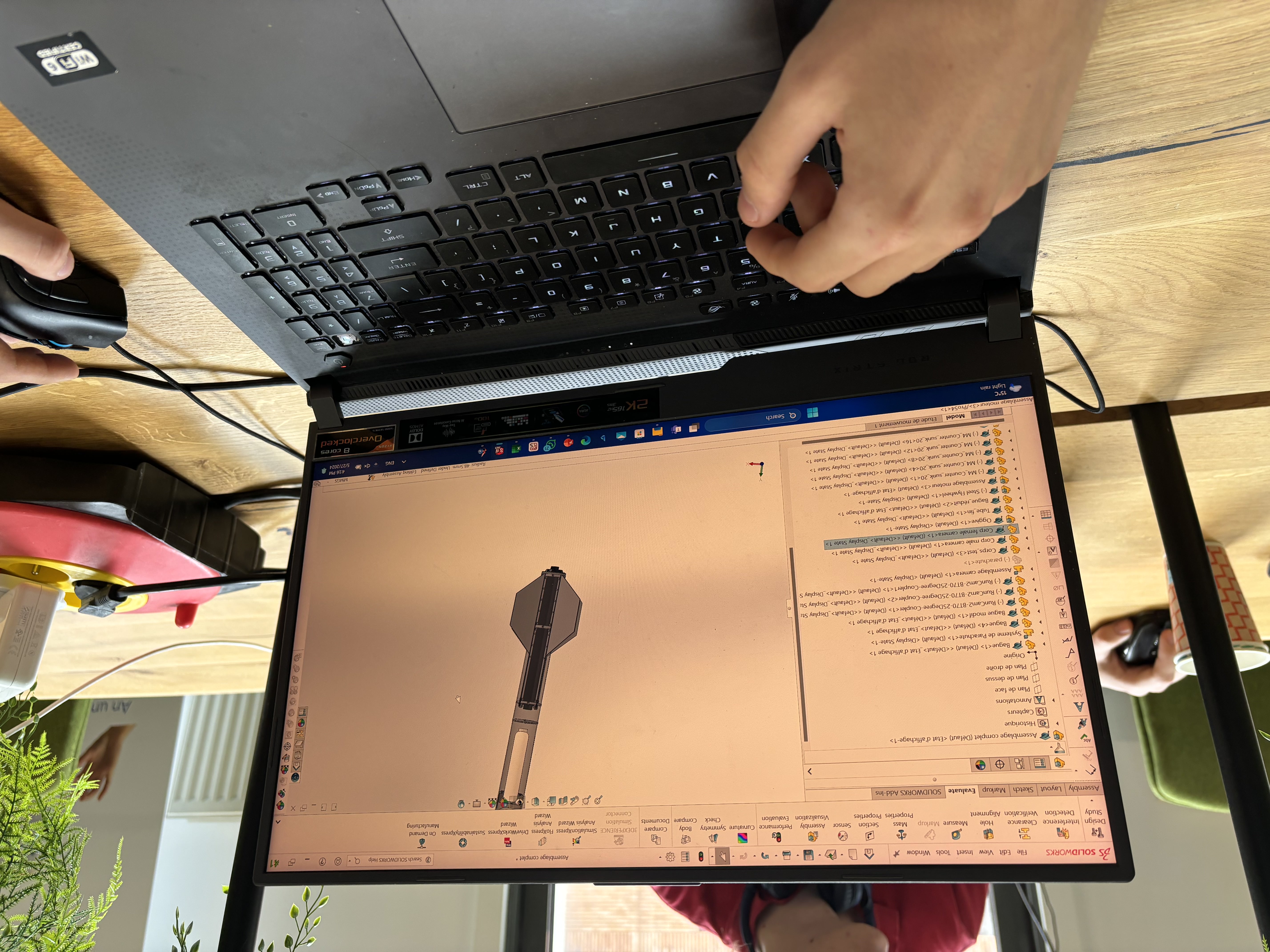
Figure 1: Conception 3D de la fusée
Membres:
Chef de projet: Matija Pejović matija.pejovic@top-aero.com
Edoardo Maffia - edoardo.maffia@top-aero.com
Lanzone Constantino - lanzone.constantino@top-aero.com
Jack Howard - jack.howard@top-aero.com
Erwan Lorenzi - erwin.lorenzi@top-aero.com
Electronique:
Tout les donnes vont être récupère pas les capteurs au bord: accéléromètres, tube de Pitot et GPS. Tout les donnes vont être récupère par la carte SD, mais aussi envoyer au station sol par télémétrie. Les données sur quantité d'acceleration et vitesse de rotations vont être envoyer au système anti-rouli qui va, par conséquent tourner la roue de rotation pour équilibré la fusée. Système de bord aura aussi une système de séparation, ce système va être allumé par une alimentation indépendante pour garanti son réussite. Le schema de système électrique est présenté la-dessus:
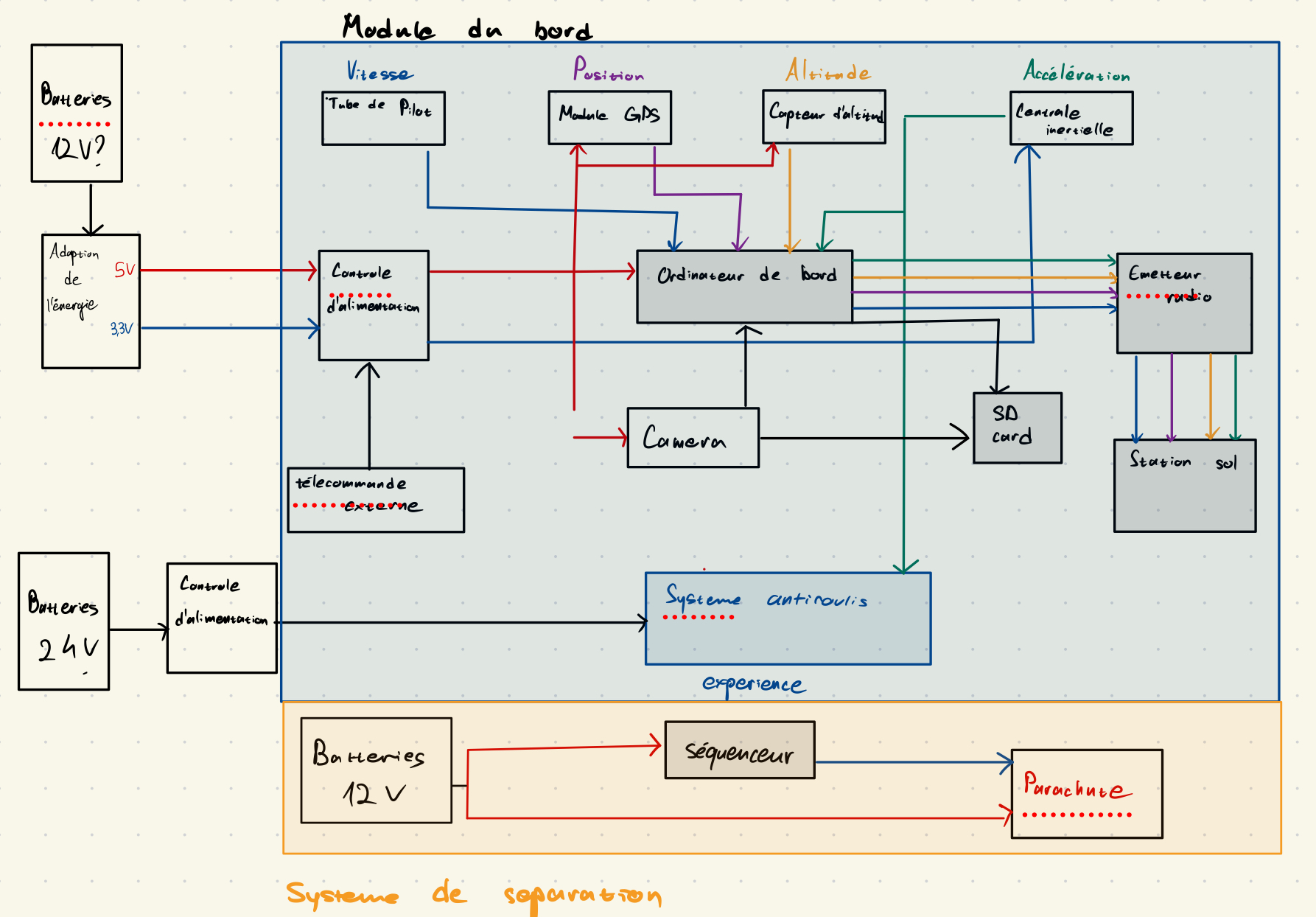
Figure 2: Système électronique de la fusée
Journal de bord
Septembre - Février :
Conception dehors Fablab
26. Février 2024:
Impression du premier prototype du systeme de separation:
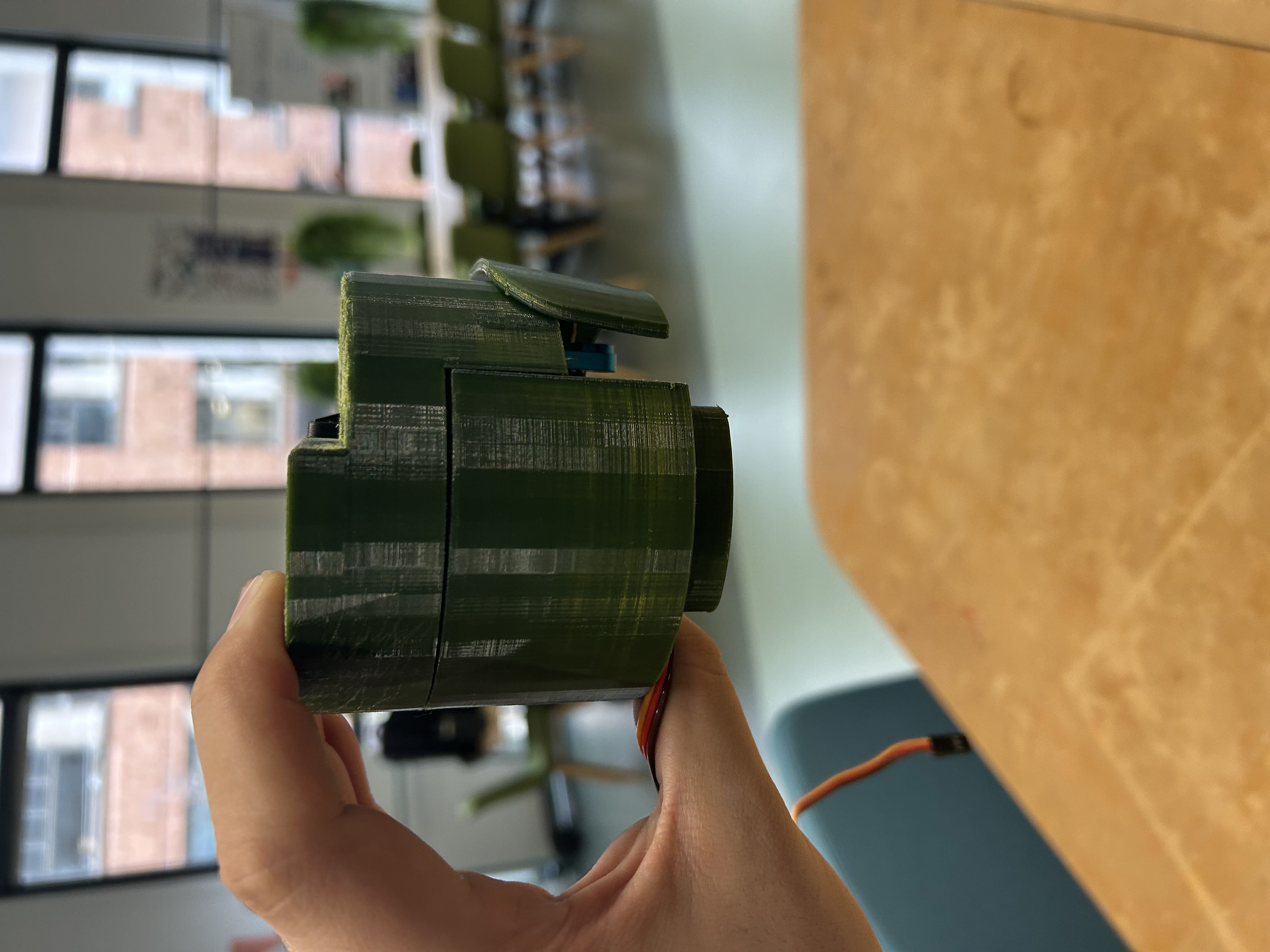
Figure 1: 1er prototype du système de séparation
4. Avril 2024:
2ème prototype du système de séparation : amélioration en termes du poids, aussi mieux placements pour le servo moteur.

Figure 2: 2ème prototype du système de séparation
6. Mai 2024:
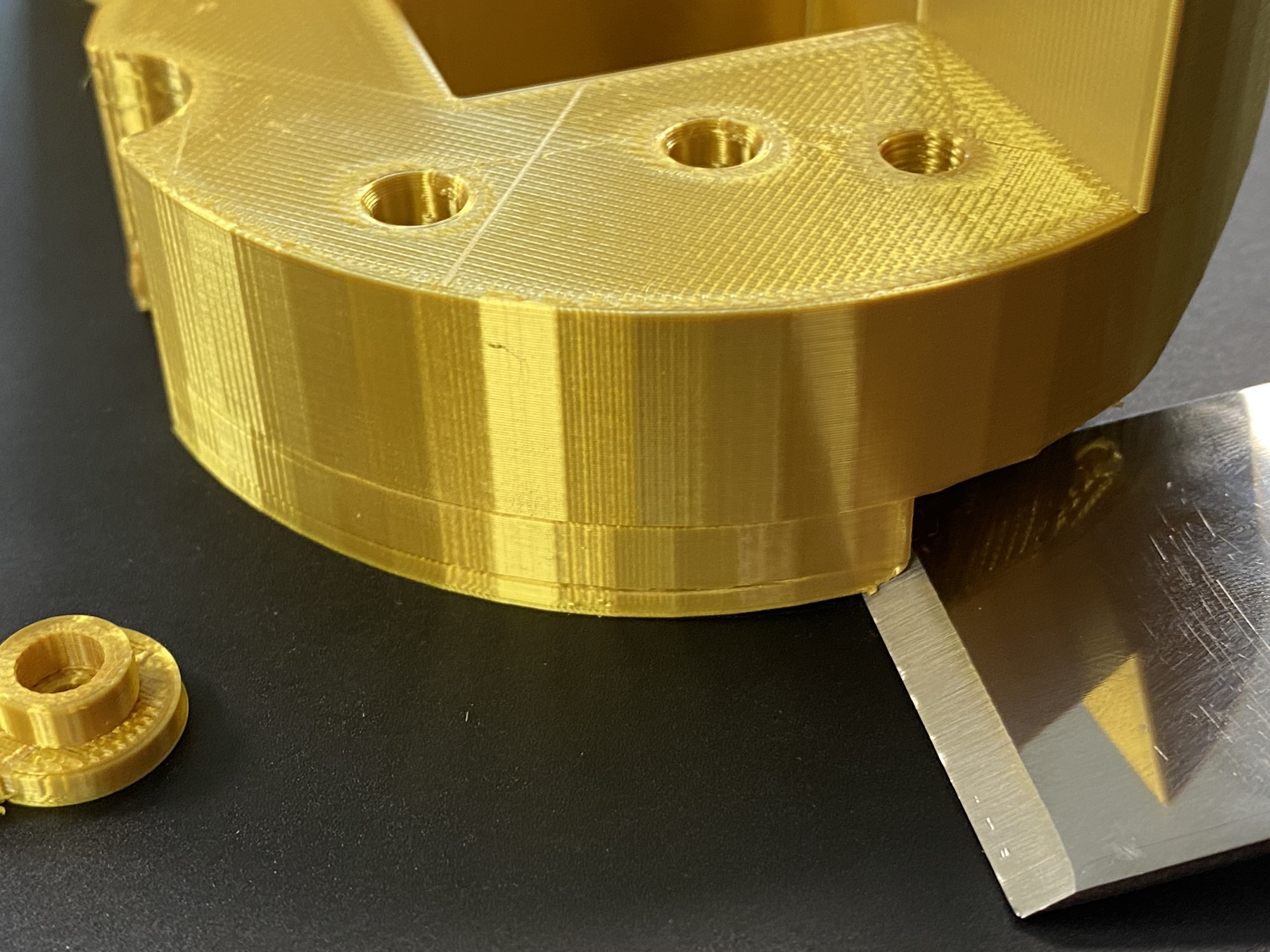
3ème prototype du système de separation: diminution de masse + different servomoteur utilisé->different volume.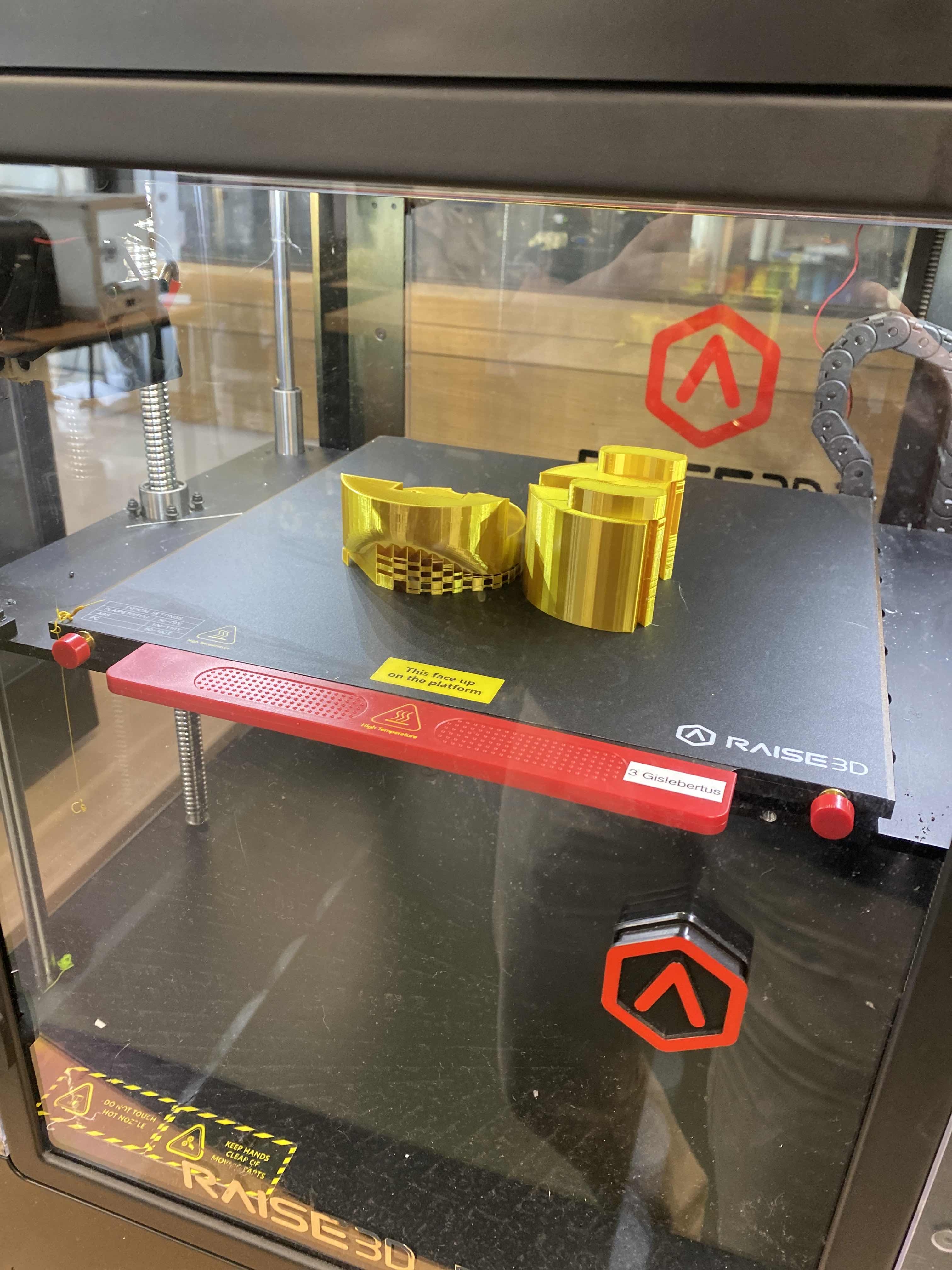
Cette fois nous avons utilisé notre PLA qui est recyclé. Nous avons raconté une problème concernant le manquante de support, par conséquent nous avons cassé la plate-forme du système en bas:
27. Mai 2024:
Travail sur la conception du cage de moteur et la 4ieme prototype du système de separation. Nous avons améliorer le concept en remplaçant les tiges qui ont été en PLA par les tiges en metal. (Hopefully last modification)
28 Mai 2024:
Production de cage de moteur, nous avons utilisé le decoupage laser pour les parties qui sont en bois et nous avons l'imprimer les bagues en PLA.
4. Juin 2024:
Assemblage du cage de moteur:
