Tripteron
Introduction
Le Tripteron est une machine faisant partie de la famille des robots parallèles1. inventée en 2004 à l'Université de Laval à partir de recherches théoriques2.
Sa particularité, comme d'autres robots parallèles, est que l'élément terminal est relié à la base par plusieurs chaînes cinématiques qui sont découplées/indépendantes ; alors que les robots sériels possèdent leur chaînes cinématiques (et leurs degrés de liberté) reliés.
| Parallel Robots | Serial Robots |
|
Delta Robot (1985) |
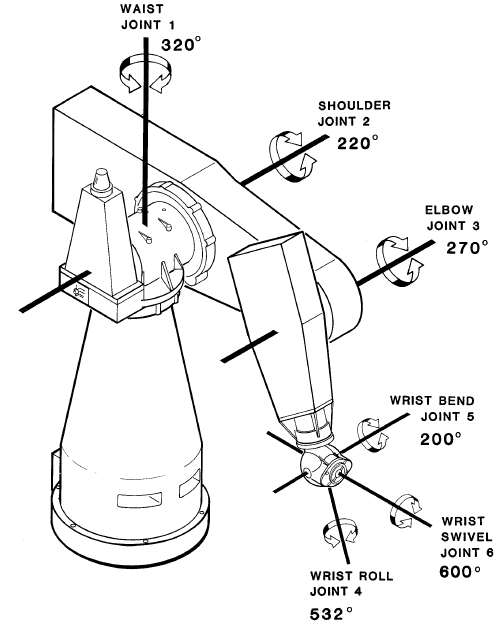
Puma Robot (1980) |
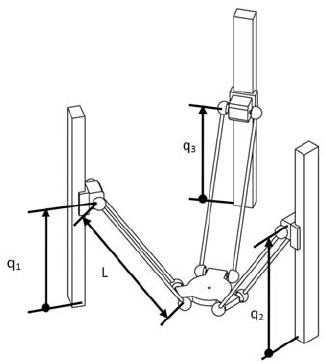
Le mouvement du Delta, robot parallèle bien connue, est généré par des translation linéaire (P) puis transmis de manière indépendantes à l'élément terminal par des "bras" de type RR (2 jointures rotatives). Le mouvement du Tripteron est lui généré par des translation linéaire puis transmis de manière indépendantes à l'élément terminal par des "bras" de type RRR (3 jointures rotatives). Il y a 3 structures indépendantes reliées à l'élément terminal permettant ainsi 3 degrés de libertés, on dit alors que la structure est de type 3PRRR3.

Le but du projet sera de construire ce manipulateur parallèle et de l'équiper de plusieurs éléments terminaux interchangeables pour diverses applications (impression 3D, découpe laser, jet d'encre, pince de préhension, etc).
Bibliographie:
1. Références sur les robots parallèles (disponible sur Primo):
Parallel Robots, Merlet Jean-Pierre
Structural synthesis of parallel robots, Gogu Grigore, Gladwell Graham, Maurice Leslie
2. Laboratoire de robotique: Tripteron et Quadrupteron (mécanismes à 3 et 4 ddl) (ulaval.ca)
3. Compact dynamic models for the tripteron and quadrupteron parallel manipulators, C Gosselin (2009)
DOI: 10.1243/09596518JSCE605
Auteur : Fivos P. - me contacter - toute aide et participation est bienvenue
Axes
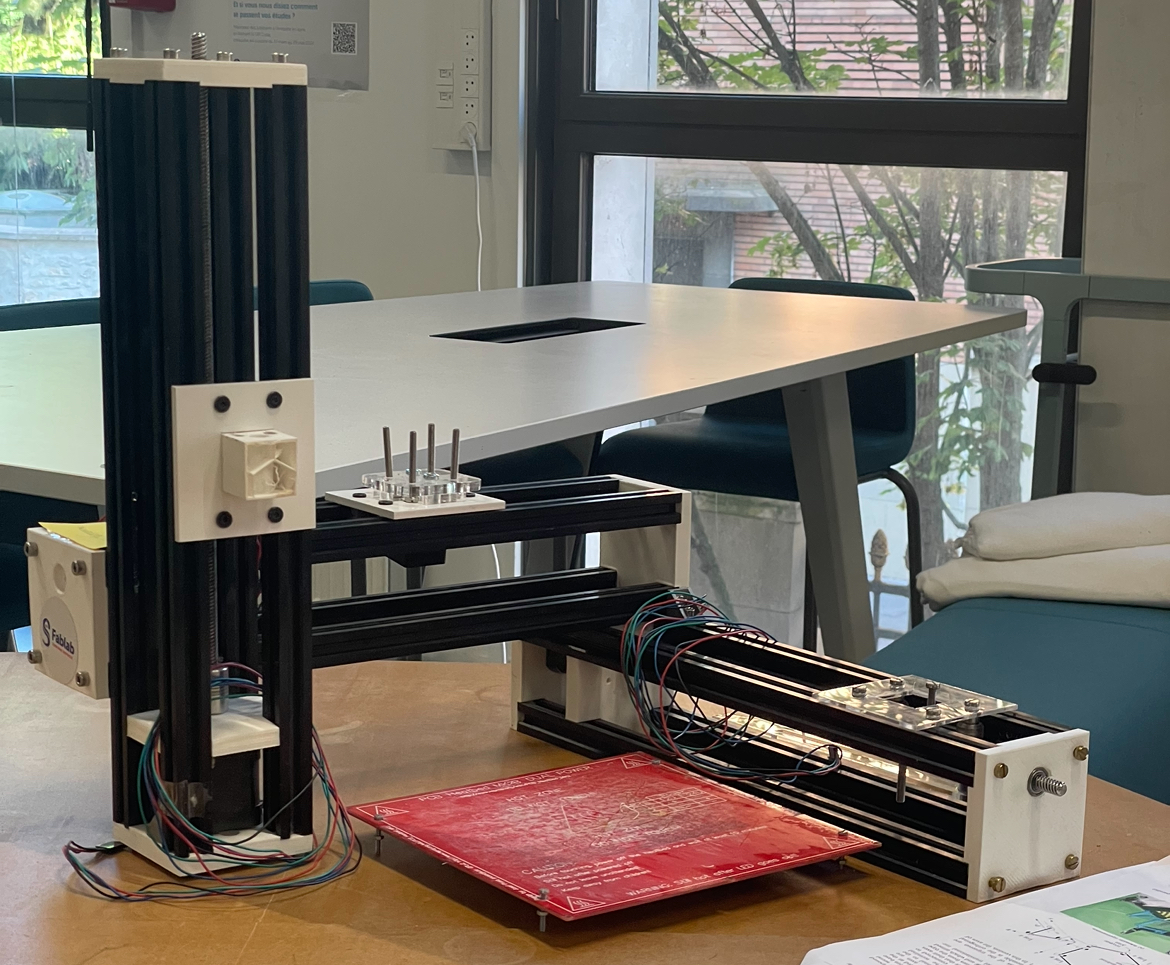
Pour les axes linéaires, je vais réutiliser les unités de guidages que j'avais construites pour mon imprimante 3D DIY (https://wiki.fablab.sorbonne-universite.fr/wiki/doku.php?id=wiki:projets:construction_imprimante_3d)
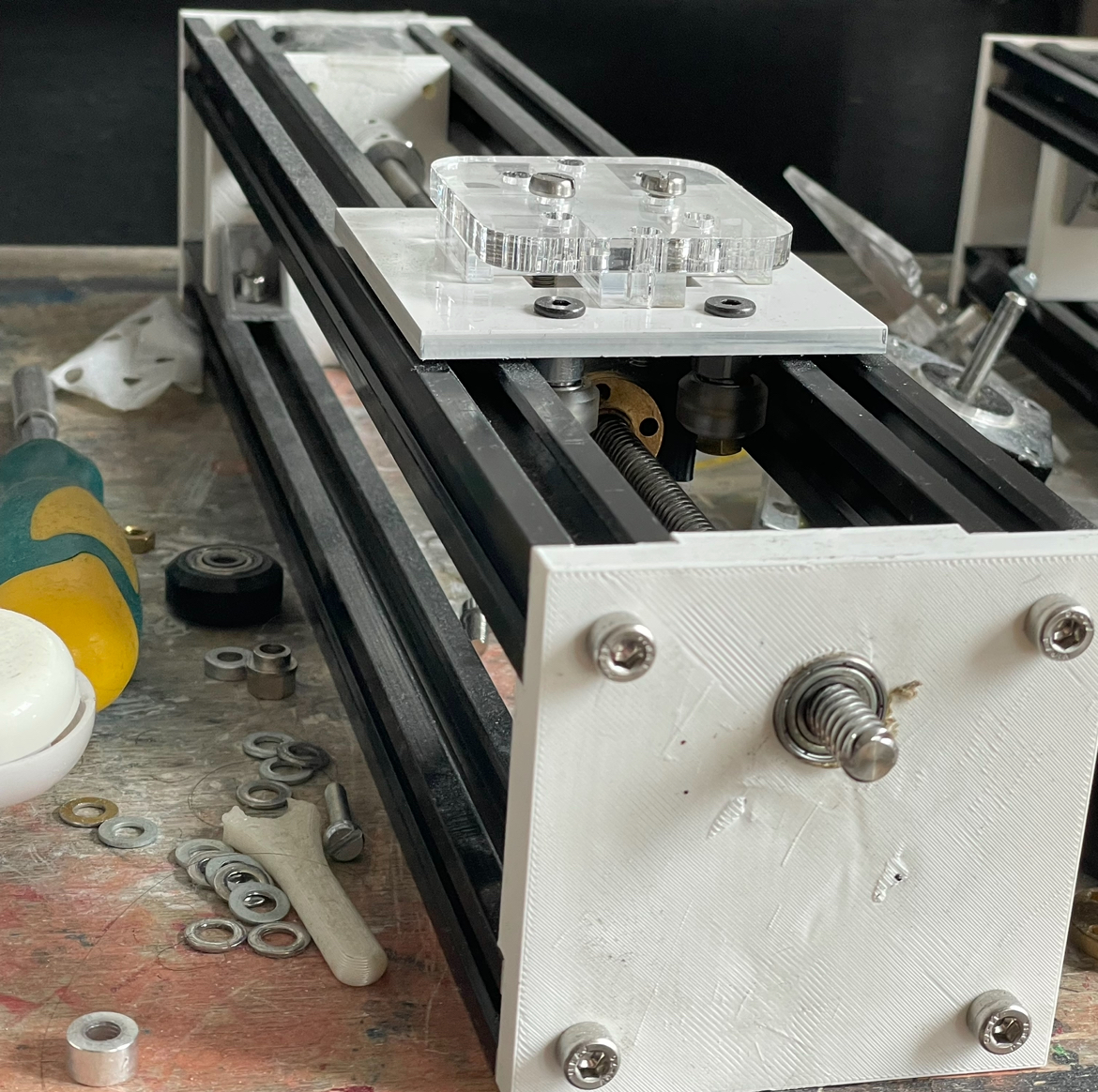
Chaque unité est séparable et modulable, elles conviennent très bien à ce projet. Elles sont faites en profilés d'alu V-Slot reliés par des pièces imprimées en 3D et permettent à des platines en PMMA découpé, équipées de roues en nylon, de coulisser via un système vis-écrou commandé par un moteur pas à pas. Ci-dessous une unité :
les fichiers sont disponibles ici
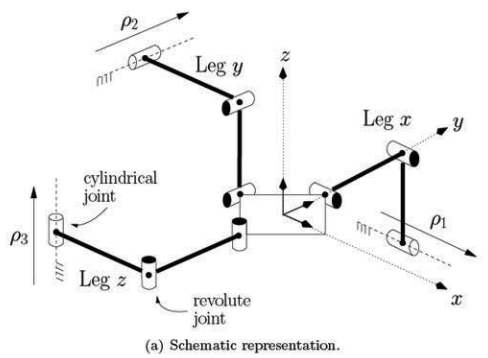
3 unités assemblées pour former une architecture tripteron :
Bras
Les "bras" ou "pattes" sont les éléments qui relient les axes linéaires à l'effecteur final (ou tête). Chaque bras est constitué de 3 rotation (Fig.3). Ce type de liaison est dénommé P RRR dans la littérature (P=1 degrés de translation R=1 degrés de rotation). La longueur des liaisons entre les roulements va influencer l'espace de travail accessible par la fin effectrice (Fig.4)
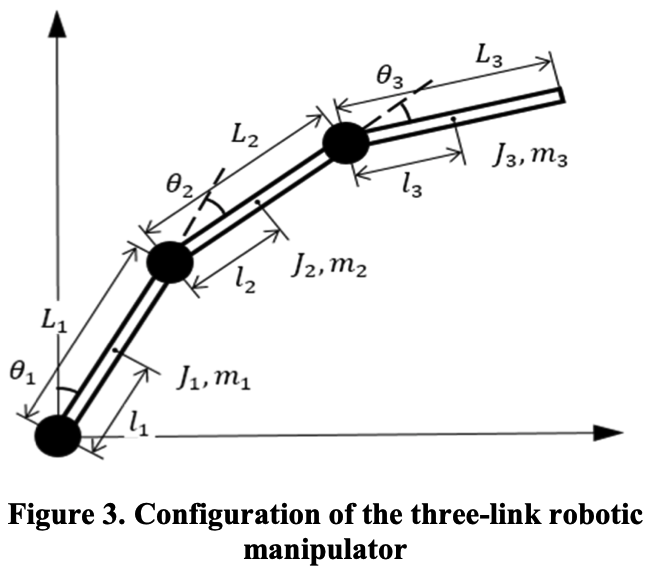 Fig4.
Fig4. 
Voici les fichiers pour les pièces qui maintiennent les roulements. Les roulements utilisés pour le bras de l'axe Z, qui supporte tout le poids de la fin effective, sont des 3201 (roulement à billes à contact oblique à deux rangées) pour maximiser la stabilité et la précision.
Les liaisons entre les rotations sont des barres de Duraluminium (AU4G 2017) pleines pour assurer légèreté et résistance.
Têtes (éléments terminaux)
Remote direct extruder
Creation d'un remote direct extruder comme Flex3drive ou Zesty Nimble, afin d'alléger la tête d'impression tout en permettant l'impression de filament flexible grâce au direct drive.
Éventuellement, j'ai pensé combiné Bowden et remote direct extruder sur l'arbre d'un seul Nema17 déporté, afin de profiter à la fois des avantages de l'extrusion direct et Bowden sans risquer la désynchronisation de pas entre les deux systèmes.
Diamond Hot end
https://inria.hal.science/hal-01660621/document
Hot end double extrusion
Gripper manipulator
seringue à argile