
Outils pour utilisateurs
Table des matières
HAL 12018, alias Apollonouon
Introduction
Chef de projet : Anderson DA SILVA (contact : anderson.da silva@etu.upmc.fr)
Membres de l'équipe : Paul PANDIKIAN, Florent BRUN, Innimei TIROUMALECHETTY, Letao YAN, Kent IYINBOR UWAGBOE.
Date de début du projet : 24 octobre 2018
Description du projet : Nous concevons un robot pour la compétition organisée dans le cadre de l'UE 3P012. La machine doit positionner un drapeau au centre d'une cible en même temps que trois autres robots, ceci en totale autonomie. La compétition aura lieu le 5 décembre 2018 ; nous avons un peu plus d'un mois pour être prêts.
Stratégie
Gardée secrète pour le moment.
Design du robot
Nous partirons sur un modèle à chenilles apportant stabilité et adhérence. Tel un petit char, il sera équipé de deux moteurs qui permettront, en alimentant chaque chenille indépendamment, de diriger le robot avec précision (part essentielle de la stratégie). Un bras mécanique télescopique ou dépliable se chargera de positionner le drapeau au centre de la cible.
Journal de bord
24/10/18
Création de la page Wiki.
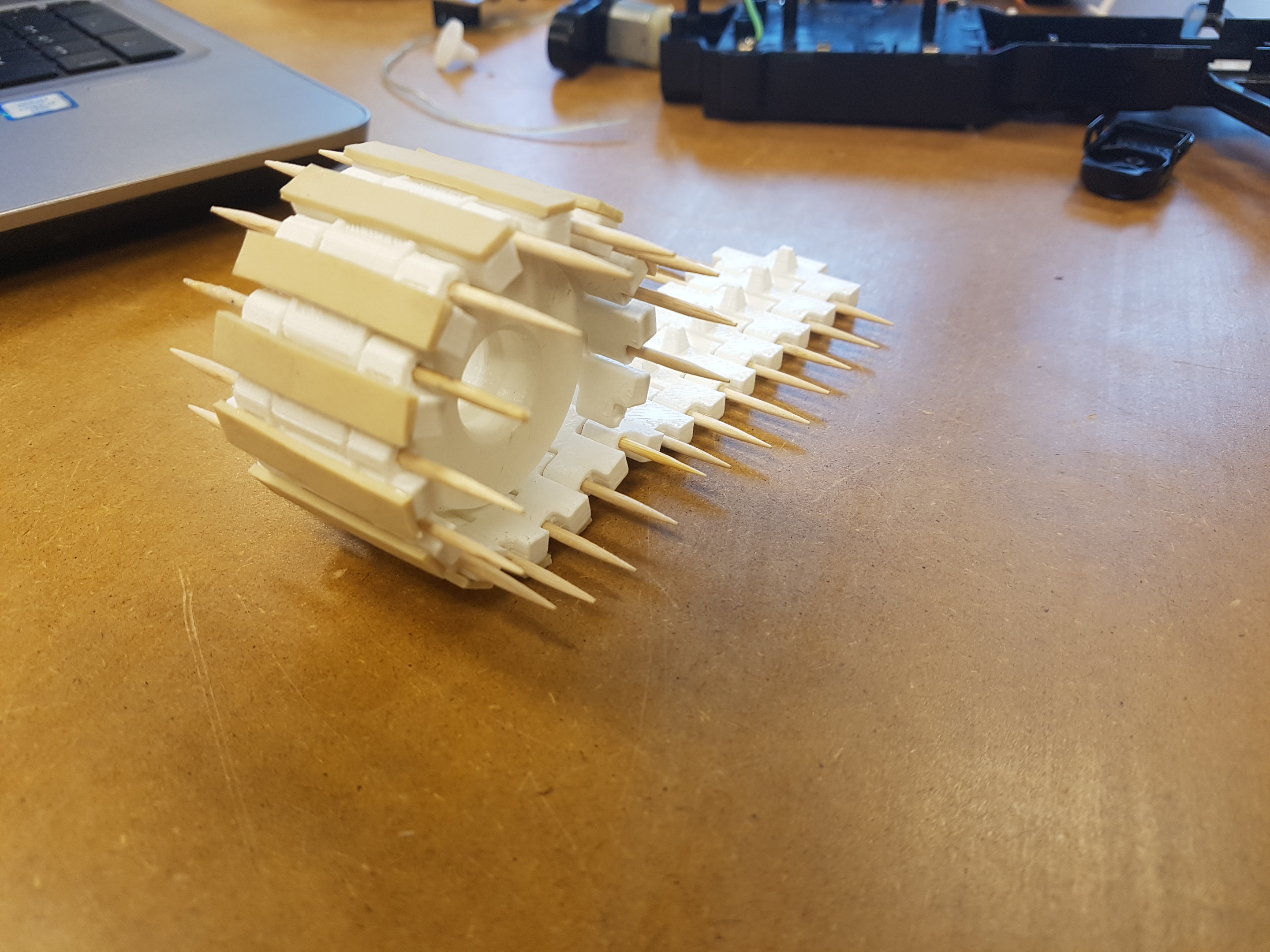
Prototypage des chenilles 20181024_154302.jpg
Les maillons sont imprimés en PLA, le design est inspiré de celui de Staind sur Thingiverse (https://www.thingiverse.com/thing:2414983). Ils sont reliés entre eux par de simple cures dent qui sont amenés à être découpés par la suite.
{kind=link}
Outils de la page
