Conception du système
Nous documentons ici les étapes de conception de notre système. Ces étapes sont séparées en deux grandes parties : la partie "IA" et la partie "Matériel".
Partie "IA"
Le modèle IA permettra d'analyser et de trier les déchets déposés. Il prend en entrée l'image du déchet et renvoie en sortie le résultat ("recyclable" ou "non recyclable").
Nous avons détaillé les étapes de création de ce modèle dans le GitHub suivant :
PlasticSense - Modèle IA
Partie "Matériel"
Cette partie englobe l'ensemble des méthodes utilisées afin de passer à un vrai système embarqué fonctionnant dans le monde réel.
L'architecture matérielle de notre système électronique peut être représentée de la façon suivante :
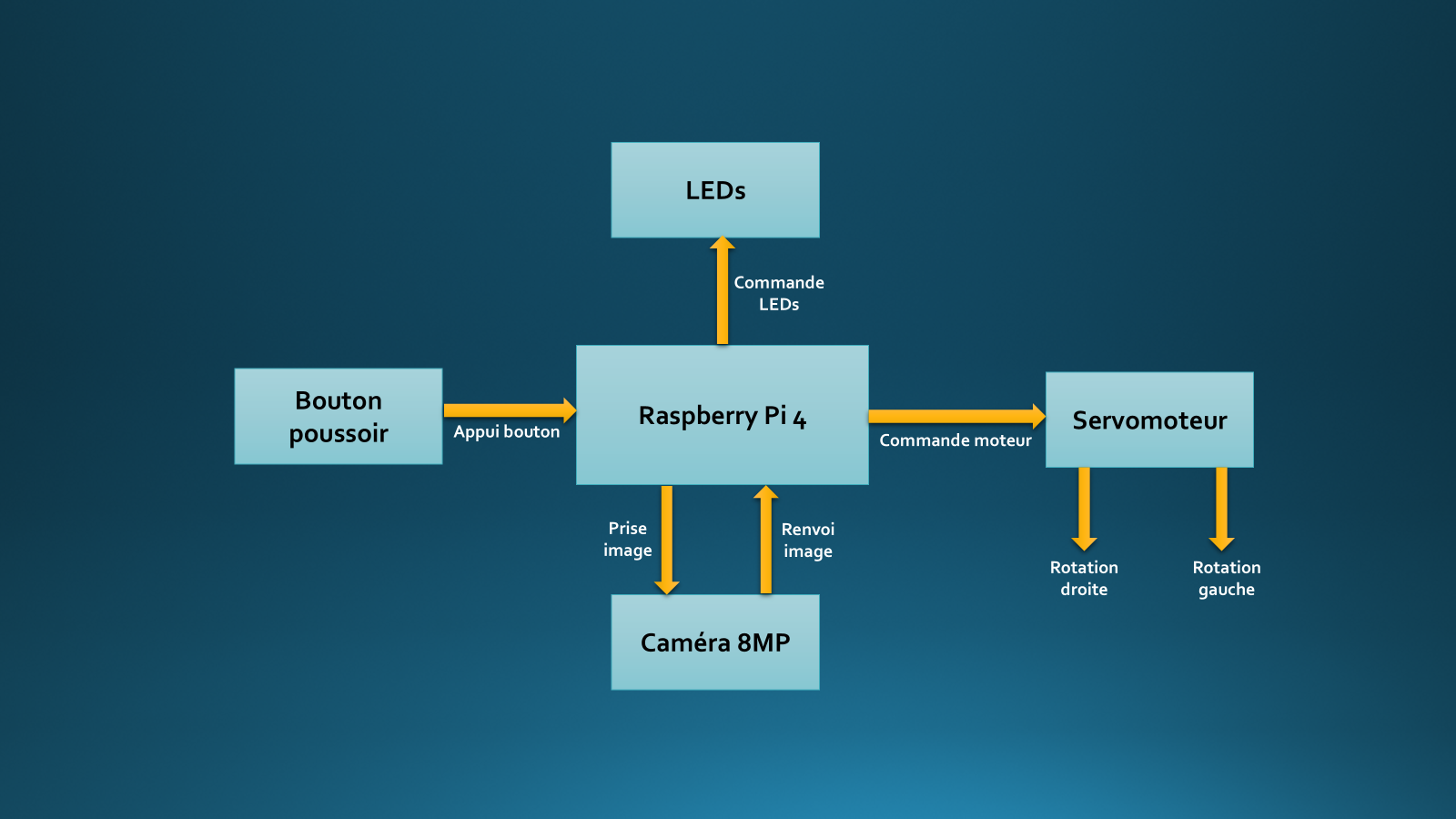
Comme vous pouvez le voir, la Raspberry Pi est le cœur de notre système. Elle lit l'état du bouton poussoir, actionne la prise d'image pour la caméra et commande le servomoteur et les LEDs.
Installation du système d'exploitation
La première chose à faire est d'installer le système d'exploitation de la Raspberry Pi sur la carte SD dédiée. Pour cela, on procède par étapes :
- Insérer la carte SD dans un adaptateur et la connecter à un ordinateur
- Lancer le logiciel Raspberry Pi Imager
- Installer le système d’exploitation sur la carte SD
- Éjecter proprement la carte SD une fois l’installation terminée
- Insérer la carte SD dans la Raspberry Pi
- Démarrer la Raspberry Pi
Au démarrage, la Raspberry Pi se connectera automatiquement au réseau Wi-Fi défini lors de l'installation (j'ai choisi de la connecter au Wi-Fi de mon ordinateur dans un premier temps).
Configuration de la caméra
On a choisi caméra JT V2-77 (basée sur le capteur Sony IMX219 - 8 mégapixels) pour la capture d’images de déchets à analyser par le modèle d’IA. Pour suivre les étapes de configuration, on peut se référer au datasheet ici.
La caméra est reliée à la Raspberry Pi via le port CSI (Camera Serial Interface). Avant toute manipulation, la carte est mise hors tension afin d’éviter tout risque électrique. La nappe de connexion est ensuite insérée dans le connecteur CSI en veillant à respecter le sens des contacts. Une vérification est effectuée pour garantir une fixation correcte et stable du module.
Une fois la caméra connectée, il est nécessaire de l’activer au niveau du système d’exploitation de la Raspberry Pi. Pour cela, le fichier de configuration système est modifié afin d’activer explicitement le capteur IMX219.
Pour ouvrir le fichier de configuration système, on utilise la commande suivante :
sudo nano /boot/config.txt
On y ajoute ensuite les lignes suivantes :
dtoverlay=imx219
camera_auto_detect=0Cette configuration permet de forcer la détection du module caméra et d’assurer sa compatibilité avec le système.
Après modification de la configuration, la Raspberry Pi est redémarrée afin d’appliquer les changements et d’initialiser correctement le pilote de la caméra :
sudo reboot
Le bon fonctionnement du module est ensuite vérifié à l’aide des outils intégrés du système.
Pour vérifier le branchement de la caméra :
libcamera-hello
Pour tester la prise d'image, on peut capturer une image de test :
libcamera-jpeg -o test.jpg
Ces tests permettent de confirmer que la caméra est correctement détectée et que les images sont exploitables pour le traitement.
No Comments