Log
As part of our UE project, we will be responsible for finding an effective solution for the currently-underdeveloped calibration method for stereovision-steered cameras underwater. In th
Jour 1 - 23.02.2023 (SAMETOGLU Alper, BARON Ludovic, HAMDY Maryam, SAURE Carmen)
On s'est réunis à l'espace prototypage pour discuter sur l'implémentation de notre idée pour la stéréovision aux caméras.
On pense à construire une boîte étanche et un support en PVC (en forme triangulaire). Pour le codage des caméras pour le traitement d'image, on a trouvé Raspberry Pi comme la meilleure solution, car il faudra examiner les photos dedans le boîtier et extraire tout de suite les valeurs voulus.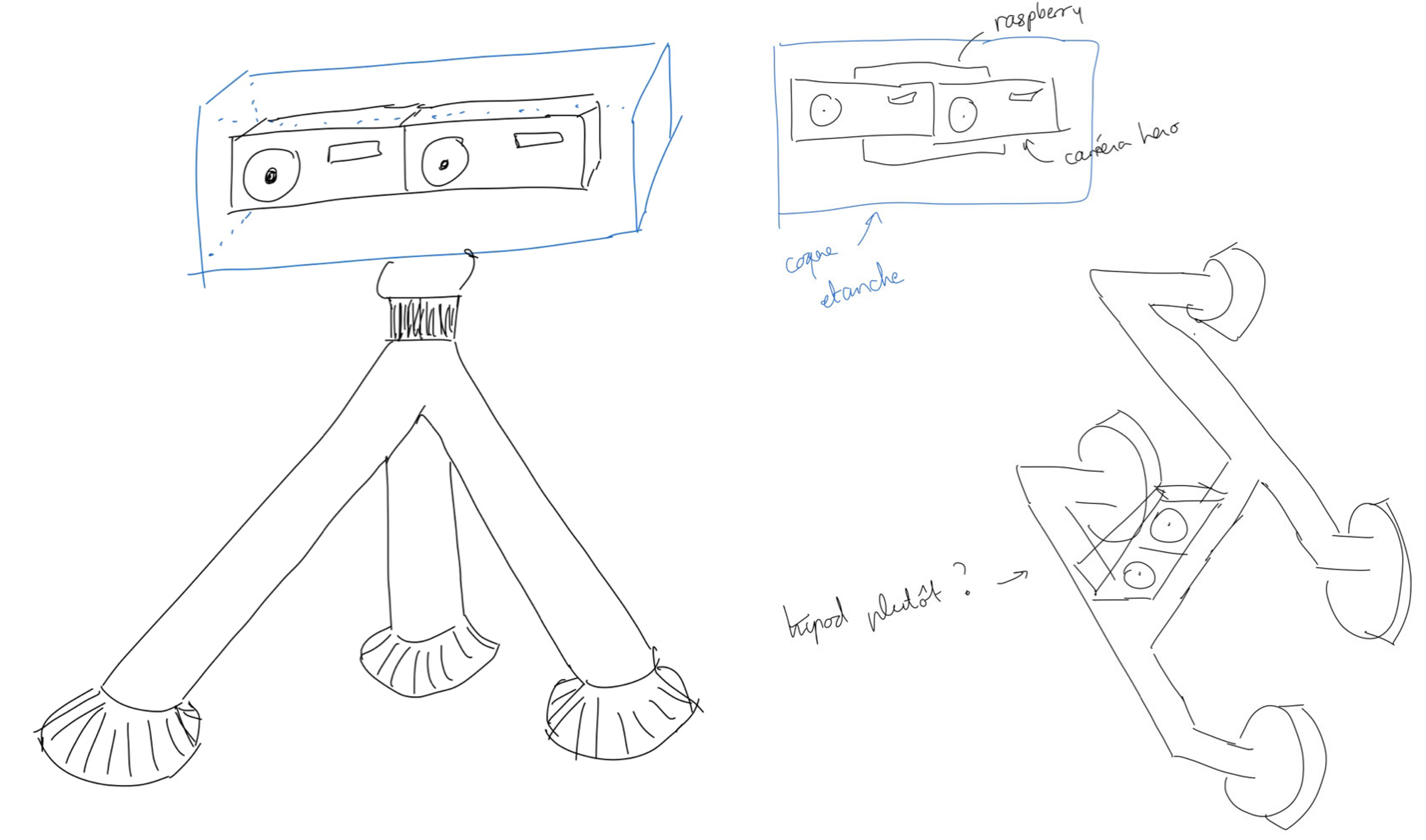
Jour 2 - 16.03.20233 (SAMETOGLU Alper, BARON Ludovic, HAMDY Maryam, SAURE Carmen)
| Liste de courses |
Prix |
Lien |
|
StereoPi camera |
66,54 |
https://www.antratek.com/imx219-83-stereo-camera |
|
Batterie externe 30000mAh |
44,99 |
https://www.boulanger.com/ref/1171871 |
|
WITTY PI 4 L3V7: REALTIME CLOCK AND POWER MANAGEMENT FOR RASPBERRY PI |
23,00 |
https://www.uugear.com/product/witty-pi-4-l3v7/ |
On a emprunté un Raspberry Pi 4 Computer modèle B, ecran pour Raspberry Pi, une carte micro SD et un câble HDMI vers mini-HDMI.
Explication des composants :
- Stereo camera : Double camera permettant de faire de la stereo-vision