Précision du positionnement en Z : limites du VL53L0X
Stéphane ayant implémenté des fonctions de démarrage progressif, d'arrêt progressif sur X, je recopie pour l'arrêt progressif sur Z. Malgré cela, on constate un écart entre la position demandée et la position atteinte.
Je soupçonne que cela provient des modes de mesure du TOF : dans la bibliothèque choisie, il y a un mode de mesure continu (et un mode continu non-blocant) et un mode de mesure unique, ponctuel. Lorsqu'on utilise ce mode, à position Z fixe, on observe des fluctuations du résultat, qui vont jusqu'à 10 mm ! En outre, la déviation entre distance mesurée à la règle et distance mesurée par le TOF dépend du matériau :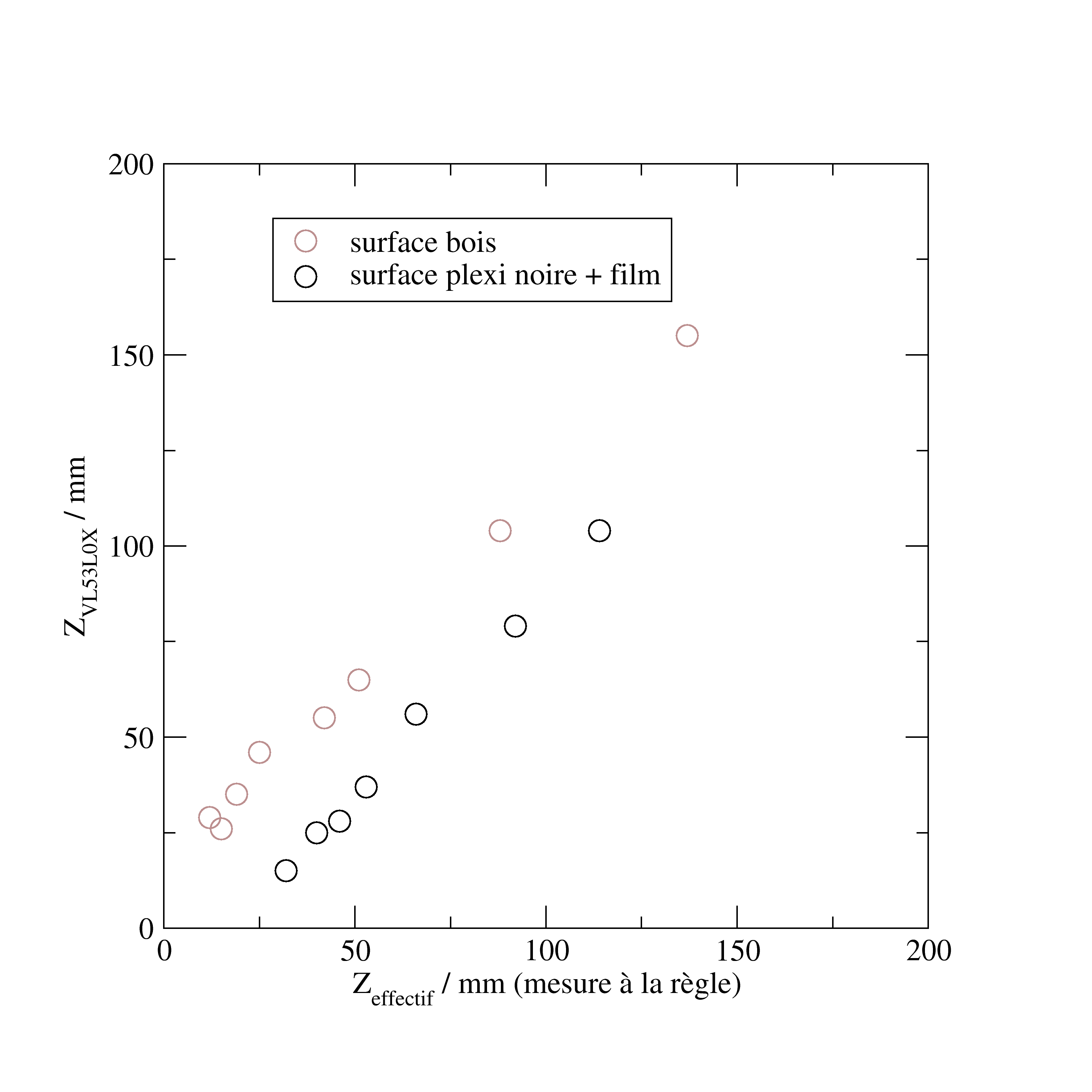
Cette expérience a plusieurs conséquences : si on veut pouvoir mesurer jusqu'au contact de la tête du XRF avec la carotte, il faut décaler le capteur sur le support (vers le haut), pour que le contact de la tête corresponde à au moins 25 mm si l'obstacle a une réflectance proche de celles du bois, ou au moins 45 mm si elle est proche de celle du plexiglass noir recouvert de son film protecteur (ce qui semble être le plus proche des carottes argileuses protégées par un film PET).
La prochaine étape sera d'optimiser les paramètres de la mesure en acquisition d'une mesure unique : le time budget de la mesure, la fréquence des impulsions etc.
Hormis la page de la bibliothèque utilisée, la source d'information la plus éclairante que j'aie trouvée est une discussion sur le forum de Pololu.
Afin de réduire la variabilité de la mesure, onil peutfaut aussi envisager un petit carter autour du capteur (des oeillères) pour limiter les réflexions parasites. Dans la mesure où on va le décaler vers le haut de 45 mm, cela signifie que le carter pourra être haut d'au moins la même longeur.