Projet final prototypage Louly Chloé Eloïse
🥣 CéréaSenseLouly.gurumi — CapteurPeluche demobile céréalescrochetée intelligentessur robot télécommandé
🎯 Définition du projet
Nom du projet : CéréaSense
Louly.gurumi
Objectif :
Créer une plateforme robotique télécommandée sur laquelle on pose un capteuranimal crocheté à la main, comme une mascotte mobile.
L’idée est de poidsdonner installévie dansaux créations en crochet en les posant sur une armoire,base capablemotorisée deque détecterl'on quandpeut undiriger paquetà de céréales est presque vide (seuil ≈ 25 g) et d’alerter l’utilisateur via un signal lumineux ou sonore.distance.
🔍👥 Besoin utilisateur
& utilisateurs
BeaucoupUtilisateurs
d’utilisateursvisésne remarquent que leur paquet de céréales est vide qu’au moment de le consommer. Le besoin est donc d’être alertéautomatiquement et discrètement:avant la rupture de stock.
👥 Cibles
-
ÉtudiantsCréateurs et créatrices de crochet -
FamillesEnfants (objet ludique) -
PersonnesGranddistraitespublicou(objetspresséesdécoratifs vivants) -
AmateursAteliers pédagogiques autour dedomotiquel’électronique + artisanat
Besoins identifiés :
-
Mettre en mouvement une peluche crochetée sans câblage visible
-
Base discrète et mobile
-
Plateforme réutilisable avec différents personnages
⚙️✨ Fonctionnalités
Fonction principale
-
DétectionPlateformed’unroulantepoidscontrôléeinférieurparàtélécommandeuninfrarougeseuil
Fonctionnalités g)secondaires
-
Plateforme stable pour recevoir différents personnages
-
AlerteCapotlumineusepersonnalisable (LED)impressionou sonore (buzzer)
Fonctionnalités secondaires (pour évolutions futures)
Affichage du poids sur écran LCD3D)-
NotificationNom/logosmartphonegravé(viaparmoduledécoupeWiFi) Multiples capteurs pour différents produitslaser
🔎🔍 Veille technologique& inspirations
Projets existants :
-
DistributeursChâssisconnectésMagician(AmazonDG007Dash,utilisébalancesdansconnectéesl’enseignementXiaomi)Arduino -
bots,Systèmes DIYProjets similairespourdecroquettesrobotsd’animauxdécoréssur(sumoInstructablesrobots
Originalité :
Design sur mesuremascottes)-
textures,ComposantsPersonnalisationsimplesartistiqueet(dômes,accessibles Conception hybride : découpe laser, impression 3D, électroniquepeinture)
🧠📄 Lean Canvas
| Élément | Contenu |
|---|---|
| Problème | |
| Proposition |
|
| Solution | |
| Canaux | |
| Revenus | Projet open-source / kit éducatif |
| Coûts | |
| Avantage |
🧰 Choix techniques
Élément Détail MicrocontrôleurStructure:mobileChâssis DG007 (2 roues + roue folle) Électronique Arduino Uno (ou+Nano)shield moteur- +
récepteur IR
CapteurContrôleTélécommande infrarouge classique Alimentation Pack de poidspiles:AACelluledecharge + module HX711Alertes :LED ou buzzerStructure :ensupérieurimpressionPlanche découpée au laser (MDF 3 mm) Capot/dôme Impression 3D pour(dômeaccueillir10lecmpaquetrayon,+14capteurcm hauteur)Dé coupecorationlaserLogo :“Louly.gurumi”Basegravédeàl’installationl'avant(optionnelle)du capot- +
-
DétectionRobotdemotorisépoidspilotableenàdessous d’un seuildistance -
DéclenchementDômeLEDsupportant un personnage crocheté TouteslesSemaine Tâche 1 Recherche, prototypage, test du châssis 2 Impression 3D du dôme, découpe laser de la base 3 :Programmation DocumentationArduino +organisationtest moteursLouly:4 Programmation ArduinoEloïse: impression 3DChloé: Impression laserPlanification du projetLundi matin (31/03): Initialisation - définition du projet, recherchesLundi après-midi (31/03): Modélisation - début des modélisations du projet. Code via Arduino, modélisation 3D via Ideamaker et modélisation laser via InkscapeMercredi matin (02/04): Modélisation #2 - suite (et fin) des modélisations. Tests techniques.Vendredi (04/04):Assemblage etfinal,derniersajouttestspeluche,techniquesdocumentation
-
(InsérerVueiciisométriquedesdudessinsrobotou+capturescapotd’+ peluche crochetée -
Schéma du câblage Arduino + shield moteur + récepteur IR
-
Capture d'écran du
supportmodèle 3Detduschémadômeélectrique)Exemple(dansd’idéeTinkercad): -
✅ Test
dumoteurscapteur: avecdifférentscodeobjets : paquet vide, semi-rempli, pleinminimal -
Calibration✅manuelle à l’aideTest d’unadhérence du châssis + poidsde 100 g connupeluche -
✅ Test de portée IR
-
✅ Ajustement forme du
seuildôme pour stabiliser la peluche -
❌ Problème résolu : alimentation insuffisante au début (
initialementUSB30 g, ramené à 25 g après essais)seul) -
Logiciel✔️:MontageFusionArduino360+/shieldTinkercad+ châssis -
Matériau✔️:ImpressionPLAdu dôme (Tinkercad → IdeaMaker) -
Paramètres✔️: 0.2 mm couche, 20 % infill, support activé - planche
Logicielavec: Inkscape (format SVG)trous -
Matériau✔️:GravureMDF“Louly.gurumi”3surmmla plaque -
Paramètres✔️machineCollage:duVitessedôme0.8,aupuissancecentre70 -
✔️ Pose de la peluche sur le dessus
-
(Insérer ici les photosMontage dumontagechâssis : - Modélisation 3D du dome sur TINKERCAD :
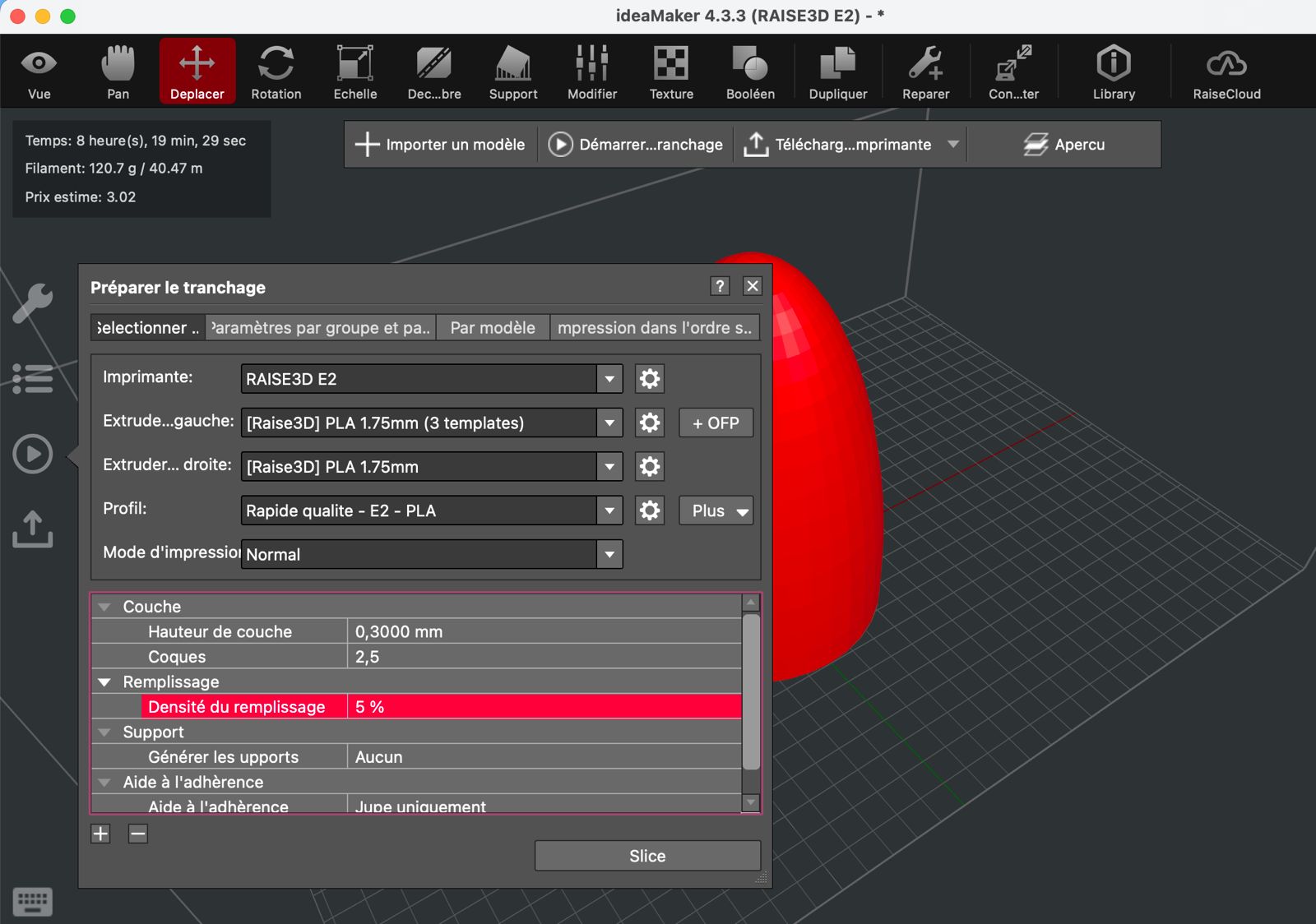
support, - Extraction du dome sur IDEAMAKER et paramètres d'impression
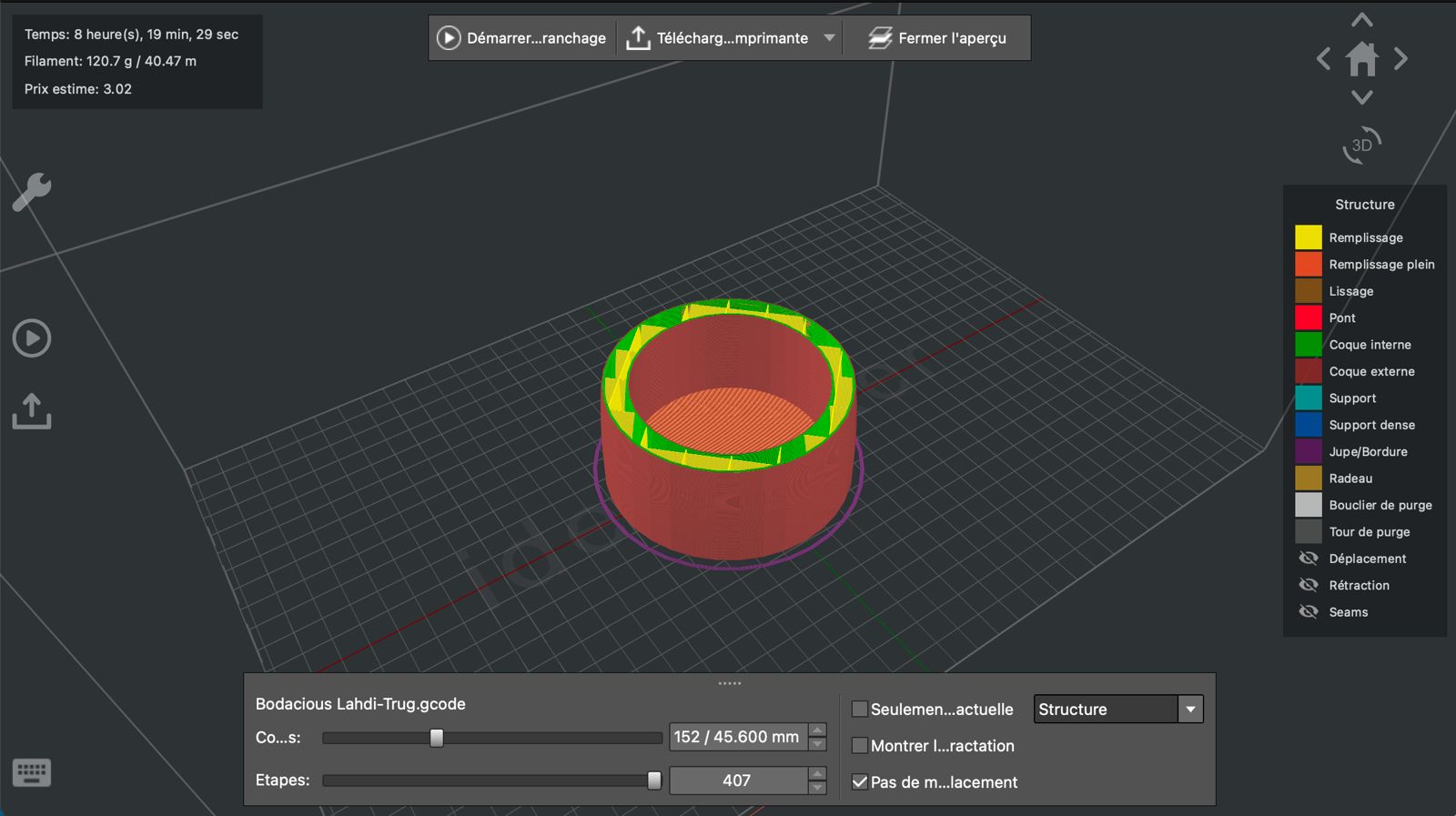
- Slice du dôme sur IDEAMAKER
-
Dôme imprimé en
armoire,PLAdéclenchement:LED,etc.) -
Résultat final avec la peluche crochetée posée :
-
Gravure laser visible :
-
IntégrerAjouteruncapteursécran(obstacle,LCD pour afficher le poidslumière) -
AjouterRendreunlemodulerobotWiFiautonome (ESP8266)suivipourligneenvoyerouuneparcoursnotificationprédéfini) -
SupportContrôlemodulaireviapourBluetoothplusieursoupaquetsappli mobile -
DesignBatterieplusrechargeablecompact+etinterrupteuresthétiqueON/OFF -
Ajout de sons / effets lumineux
-
modélisationInstructables : capteurs de poidsTinkercad pourcroquettesdu Fusion 360 pour la conception 3Ddôme-
Inkscape pour la
découpegravure laser -
LibrairieTutoriels IRremote ArduinoHX711 -
GitHub -
Documentation du FabLab Sorbonne
📅 Gestion de projet
MVP (Minimum Viable Product (MVP)Product)
Répartition des rôlesPlanning
✏️ Croquis &/ dimensionsDesign (à insérer sur wiki)
📦🧾 ListeMatériel du matérielutilisé
| Élément | Quantité | |
|---|---|---|
| Arduino |
1 | Contrô |
| 1 | ||
| 1 | ||
| 1 | ||
| 1 | ||
| Moteurs DC | 2 | Déjà montés |
| Roue folle | 1 | Stabilisation |
| Batterie (6xAA) | 1 | Alimentation mobile |
| Planche MDF 3 mm | 1 | Découpe laser (180x120 mm) |
| PLA | - | |
💻 Code Arduino (extrait de base IR + moteurs)
}
🧪 Tests, essais & erreursajustements
🏗️ Réalisation du prototypephysique
Impression 3D :
Découpe laser :
de - la
📸 PrototypePhotos finalà intégrer

Hauteur de couche : 0,3mm
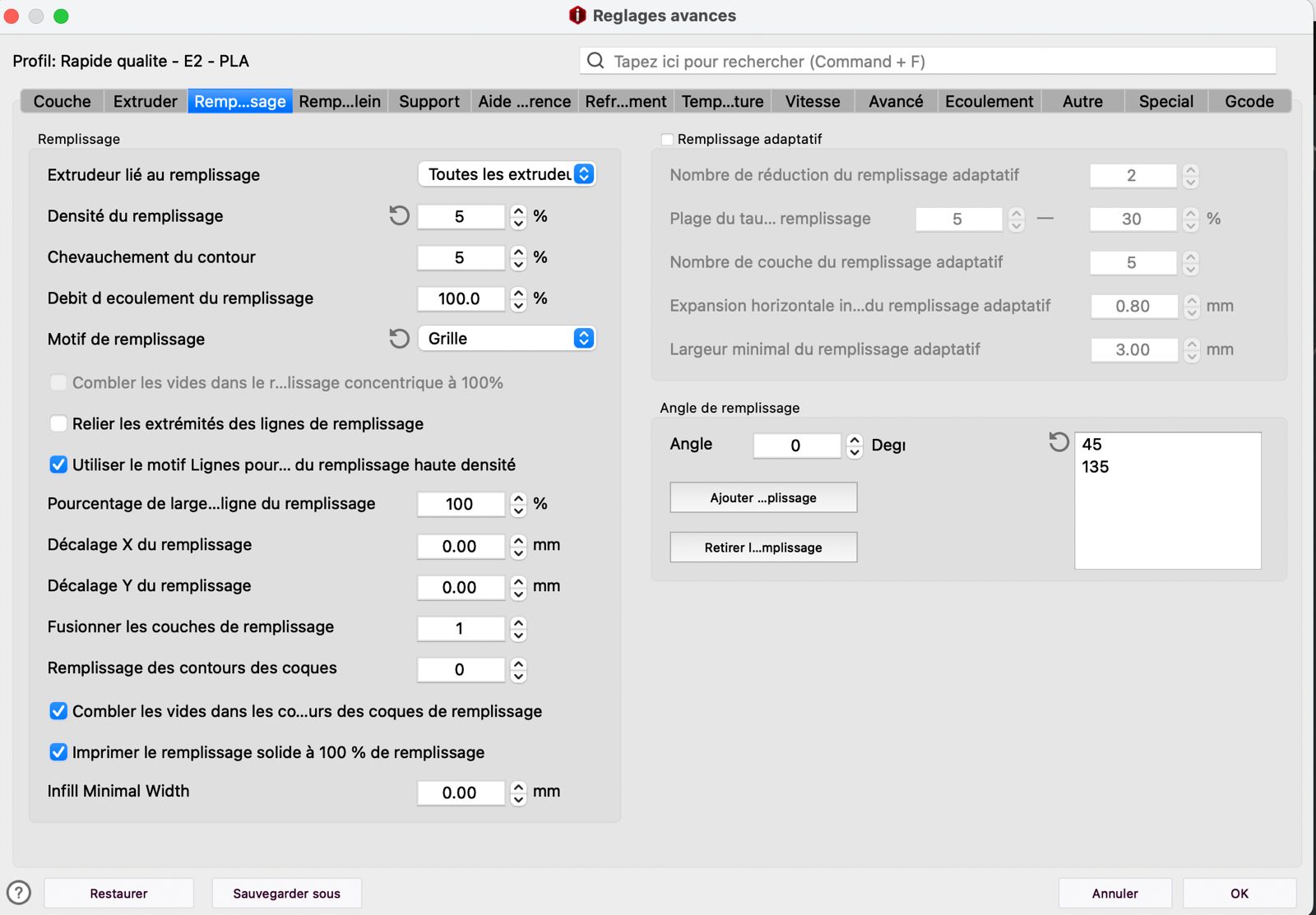
Impression intérieur : initiale --> Gyroïde vs finale --> Grille pour optimiser le temps d'impression
Densité de remplissage : 5% (faible car pas nécessaire comme on a fait un trou directement sur modélisation tikercad)