Maquette TP Rob
Dans ce document vous pourrez trouver les références, test et modèles utilisés pour créer les maquette de TP de robotique (ici créés dans le but de faire un cours aux ROB3).
TEST
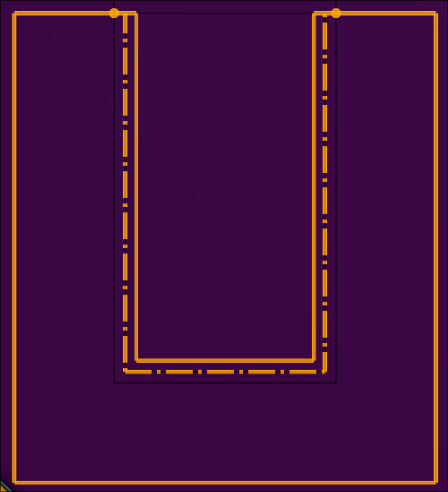
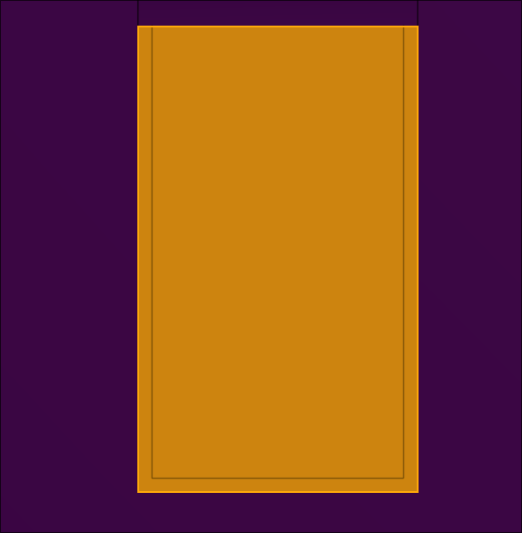
Découpe laser écart plan : -0.3 mm
- 0.2 mm -> les deux pièces ne se touchent pas
- 0.1 mm -> les deux pièces ne se touchent pas
- 0 mm -> les deux pièces ne se touchent pas
- -0.2 mm -> contacte mais toujours possible de bouger
- -0.4 mm -> ne peuvent pas entrer l'une dans l'autre
- -0.3 mm -> contacte sérré entre les deux pièces
Voici les formes utilisés pour les tests :
Vous pouvez trouver les fichiers dans le git lié ici : https://github.com/MrBloue/Maquettes
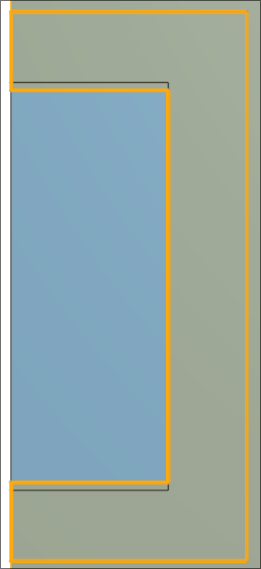
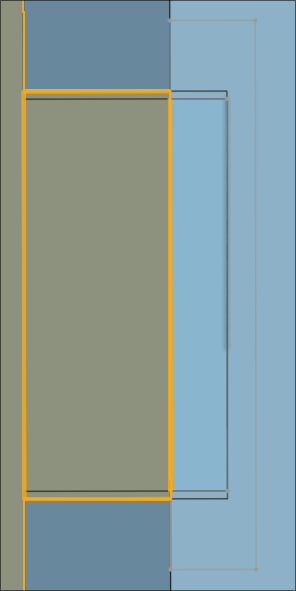
Découpe laser écart perpendiculaire : -0.3 mm
- 0.2 mm -> les deux pièces ne se touchent pas horizontalement, mais perte d'espace verticalement
- -0.3 mm horizontal et 0 mm verticale -> contacte sérré entre les deux pièces
Vous pouvez trouver les fichiers dans le git lié ici : https://github.com/MrBloue/Maquettes
Impression 3D prusa : 0.2 mm
- 0.1 mm -> les deux pièces plastique s'emboite très difficilement et le contact avec le roulement ne se fait pas.
- 0.2 mm -> les deux pièces plastique s'emboite très facilement, le contact plat dû au méplat ne permet pas le blocage et le contact avec le roulement ne fait pas .
- 0.15 mm et 0 mm écart pour contact roulement ->
Découpe laser écart circulaire :
- 0.1 mm ->