King Dong : Les Rois de la Larme (Anciennement de la Sonette)
Membre du groupe: BREZOVSEK Kylian ; BERTOLETTI Alex ; BRIENDO Alex ; CAMUS Paul
AjouterNous sommes des étudiants en première année de CMI. Dans le cadre de notre UE FABLAB (UEFDGHYU), nous avons pour objectif de concevoir un texteprojet en groupe de 4 avec comme seule obligation l’utilisation d’introduction.au moins un capteur environnemental. Cette UE est divisé en 10 séance à l’issue desquelles nous devrons réaliser une présentation de notre projet.
Séance 1 : Introduction au FabLab
Séance 1 : Nous avons découvert les locaux du FabLab et ses origines ainsi que l'état d'esprit de partage mis en place par son créateur Neil Gershenfeld. Nous avons ensuite commencé à réfléchir à notre idée de projet sur le thème des capteurs. Nous nous orientons pour l'instant vers un appareil qui serait utile dans le cadre de la pratique de la plongée sous-marine. Il s'agit d'un boîtier waterproof, que nous ferions le plus petit possible, contenant des capteurs de pression, de température et un GPS si nous arrivons à bien optimiser l'espace.
Séance 2 : Découverte de l'Arduino
Séance 2: La séance a commencé par un historique de l'électronique. De l'électromagnétisme à la micro-électronique actuelle, le monde de l'électronique s'est vu transformé par les physiciens au fil du temps. Nous avons été introduits à la carte Arduino, qui apporte une approche plus simple au prototypage que les circuits gravés. Au cours de travaux pratiques, nous avons découvert le langage Arduino, notamment les fonctions setup pour l'initialisation et loop pour faire une boucle. Aussi, nous savons maintenant où trouver des bibliothèques spécifiques et les importer afin de réaliser des tâches.
Afin de nous familiariser avec la carte Arduino, nous avons essayer d’y brancher plusieurs composants avec des branchements groves. Ces branchements sont des plus robustes que les câbles Dupont initialement utilisés et empêchent la mise en court circuit de la carte et ainsi endommager celle-ci. Dans un premier temps, nous y avons branché un capteur de température et d’humidité (comme l’image 1). Pour en extraire les données, il faut tout d’abord importer une bibliothèque qui va permettre de comprendre le code qui nous et ainsi d’afficher les données obtenues par le capteur sur la console.
Ensuite, nous y avons branché un écran LCD (image 2) et avons répété le protocole précédent. Toutefois, la bibliothèque disponible sur GitHub n’était pas fonctionnelle.
Séance 3 : Modélisation 2D et 3D
Séance 3 : Lors de cette troisième séance, nous avons découvert les différentes manières de modéliser un objet aussi bien en deux qu'en trois dimensions afin de pouvoir ensuite le faire confectionner par une machine (graveur laser et imprimante 3D).
Afin de modéliser en deux dimensions, nous avons utilisé le logiciel de dessin vectoriel Inkscape permettant de générer des fichiers SVG exploitables directement par les graveurs laser. Conventionnellement, on dessine en rouge les contours que nous souhaitons voir découpés et en noir ceux que nous souhaitons voir gravés, le tout toujours avec des traits d'un pixel d'épaisseur.
Dans le but de modéliser des objets en 3 dimensions, nous avons utilisé deux logiciels :
- OpenSCAD qui nous permet de modéliser en utilisant du code de la forme
et pour lequel il existe une "cheat sheet"translate([0, 50, 0] cylinder(h = 50, r =100)); - FreeCAD, dont on utilisera surtout le workbench "Part"
Il est important de noter qu'il existe des banques de modèles 2D et 3D tels que Thingiverse (3D)
Nous avons également vu en fin de séance comment opérer les machines que nous utiliserons lors de notre projet, notamment via le logiciel IdeaMaker pour les imprimantes 3D
Séance 4 : Prototypage du M5Stack
Séance 4 : Au cours de cette séance, nous avons approfondi nos compétences préalablement acquises en prototypage. Nous avons premièrement testé le programme "Hello World" obtenu sur GitHub et utilisé sur un M5Stack Core-ESP32.
Nous avons ensuite téléchargé l'ensemble des fichiers GitHub liés au M5Stack. Puis, nous avons paramétré un M5Stack afin qu'il affiche la température et le pression mesurée par un capteur SHT31.
#include <M5Stack.h>
#include <Arduino.h>
#include <Wire.h>
#include "SHT31.h"
#include <Wire.h>
#include "rgb_lcd.h"
SHT31 sht31 = SHT31();
void setup() {
M5.begin();
M5.Power.begin();
sht31.begin();
M5.Lcd.print("Affichage pression et température");
}
void loop() {
float temp = sht31.getTemperature();
float hum = sht31.getHumidity();
M5.lcd.print("Temp = ");
M5.lcd.print(temp);
M5.lcd.println(" C"); //The unit for Celsius because original arduino don't support speical symbols
M5.lcd.print("Hum = ");
M5.lcd.print(hum);
M5.lcd.println("%");
M5.lcd.println();
delay(1000);
M5.lcd.setCursor(0, 0);
M5.lcd.print("Temp = ");
M5.lcd.print(sht31.getTemperature());
M5.lcd.setCursor(0, 1);
M5.lcd.print("Humidity = ");
// print the number of seconds since reset:
M5.lcd.print(sht31.getHumidity());
delay(2000);
}Nous avons ensuite modifié ce code afin d'afficher les données avec une police différente (plus grande et jaune) grâce au pack "Free Font" obtenu sur GitHub :
#include <M5Stack.h>
#include <Arduino.h>
#include <Wire.h>
#include "SHT31.h"
#include <Wire.h>
#include "rgb_lcd.h"
#include <M5Stack.h>
#include "Free_Fonts.h"
SHT31 sht31 = SHT31();
void setup() {
M5.begin();
M5.Power.begin();
sht31.begin();
}
void loop() {
M5.lcd.clear();
int xpos = 0;
int ypos = 40;
M5.Lcd.setFreeFont(FSB9);
M5.Lcd.println();
M5.Lcd.setTextColor(TFT_YELLOW);
M5.Lcd.setCursor(xpos, ypos);
float temp = sht31.getTemperature();
float hum = sht31.getHumidity();
M5.lcd.print("Temp = ");
M5.lcd.print(temp);
M5.lcd.println(" C"); //The unit for Celsius because original arduino don't support speical symbols
M5.lcd.print("Hum = ");
M5.lcd.print(hum);
M5.lcd.println("%");
M5.lcd.println();
delay(500);
M5.lcd.setCursor(0, 0);
M5.lcd.print("Temp = ");
M5.lcd.print(sht31.getTemperature());
M5.lcd.setCursor(0, 1);
M5.lcd.print("Humidity = ");
delay(1000);
}Le résultat obtenu est le suivant :

Lors de la suite de la séance, nous avons chacun entreprit la modélisation de deux objets : un en 2 dimensions et un autre en 3.
Séance 4 bis : Petits projets : Découverte impression 3D et découpe laser
Projet avec graveuse/découpeuse laser :
Nom : BREZOVSEK Kylian : Projet carte à jouer e... | Wiki FablabSU (sorbonne-universite.fr)
Nom : BRIENDO Alex : https://wiki.fablab.sorbonne-universite.fr/BookStack/books/petits-projets/page/chapeau-de-luffy-le-pirate-et-cercle-de-transmutation
Nom : CAMUS Paul
J’ai eu l’idée de faire graver cette citation du film Astérix et Obélix : Mission Cléopatre : « Vous savez, moi je ne crois pas qu'il y ait de bonne ou de mauvaise situation. Moi, si je devais résumer ma vie aujourd'hui avec vous, je dirais que c'est d'abord des rencontres. Des gens qui m'ont tendu la main, peut-être à un moment où je ne pouvais pas, où j'étais seul chez moi. Et c'est assez curieux de se dire que les hasards, les rencontres, forgent une destinée... Parce que quand on a le goût de la chose, quand on a le goût de la chose bien faite, le beau geste, parfois on ne trouve pas l'interlocuteur en face je dirais, le miroir qui vous aide à avancer. Alors ça n'est pas mon cas, comme je disais là, puisque moi au contraire, j'ai pu : et je dis merci à la vie, je lui dis merci, je chante la vie, je danse la vie... je ne suis qu'amour ! Et finalement, quand beaucoup de gens aujourd'hui me disent « Mais comment fais-tu pour avoir cette humanité ? », et bien je leur réponds très simplement, je leur dis que c'est ce goût de l'amour ce goût donc qui m'a poussé aujourd'hui à entreprendre une construction mécanique, mais demain qui sait ? Peut-être simplement à me mettre au service de la communauté, à faire le don, le don de soi... ».
J’ai ensuite décidé de donner au contreplaqué la forme d’un parchemin/papyrus afin de rappeler l’Égypte, lieu où le film se déroule.
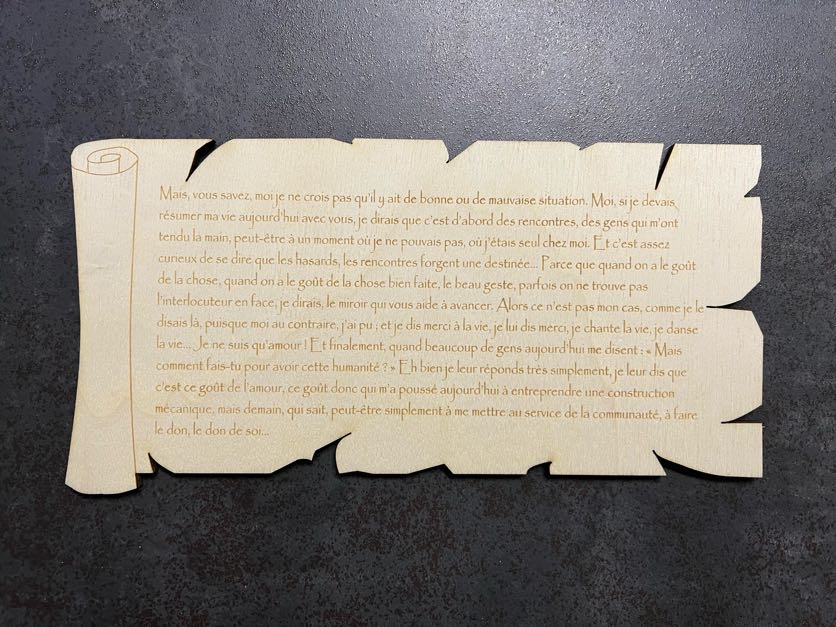
Pour ce faire, j’ai utilisé le logiciel Inkscape qui permet de dessiner en 2D n’importe quel objet. Par convention, la découpeuse laser sait que lorsqu’un trait est rouge, il faut découper et lorsqu’il est noir, il faut graver. J’ai rencontré un seul véritable problème : assigner 2 couleurs différentes à un seul et même trait. Pour palier à ce problème, j’ai voulu trouver le moyen de sectionner mon trait en 2. Grâce à Stéphane du FABLAB, que je remercie, j’ai découvert la touche qui permet de séparer 2 noeuds d’une même ligne ; ensuite il fallait sélectionner tous les noeuds de l’objet que je voulais colorer d’une autre couleur puis les couper (CTRL+X) et les coller afin de recréer un objet à part entière. Le résultat finale est le suivant :
Enfin, afin de pourvoir utiliser la découpeuse, il faut enregistrer l’image de notre objet en SVG en obtenant ainsi :
Je suis ensuite passé à l’utilisation de la découpeuse laser. J’ai utilisé celle-ci :

Clara, que je remercie aussi, m’a aidé à paramétrer la découpeuse en déplaçant la pointe du laser mais aussi en réglant numériquement mon objet. Pour le support, j’ai utilisé une chute de contreplaqué en 6mm. J’ai donc adapté la taille de mon objet en fonction de la place disponible sur la chute. J’ai ensuite lancé l’impression qui a commencé par graver le texte puis a terminé en découpant le bois.
Le résultat est au dessus de mes attentes, la découpeuse est étonnement précise.
Projet avec imprimante 3D :
Nom : BREZOVSEK Kylian : Projet impression 3D clé | Wiki FablabSU (sorbonne-universite.fr)
Nom : CAMUS Paul
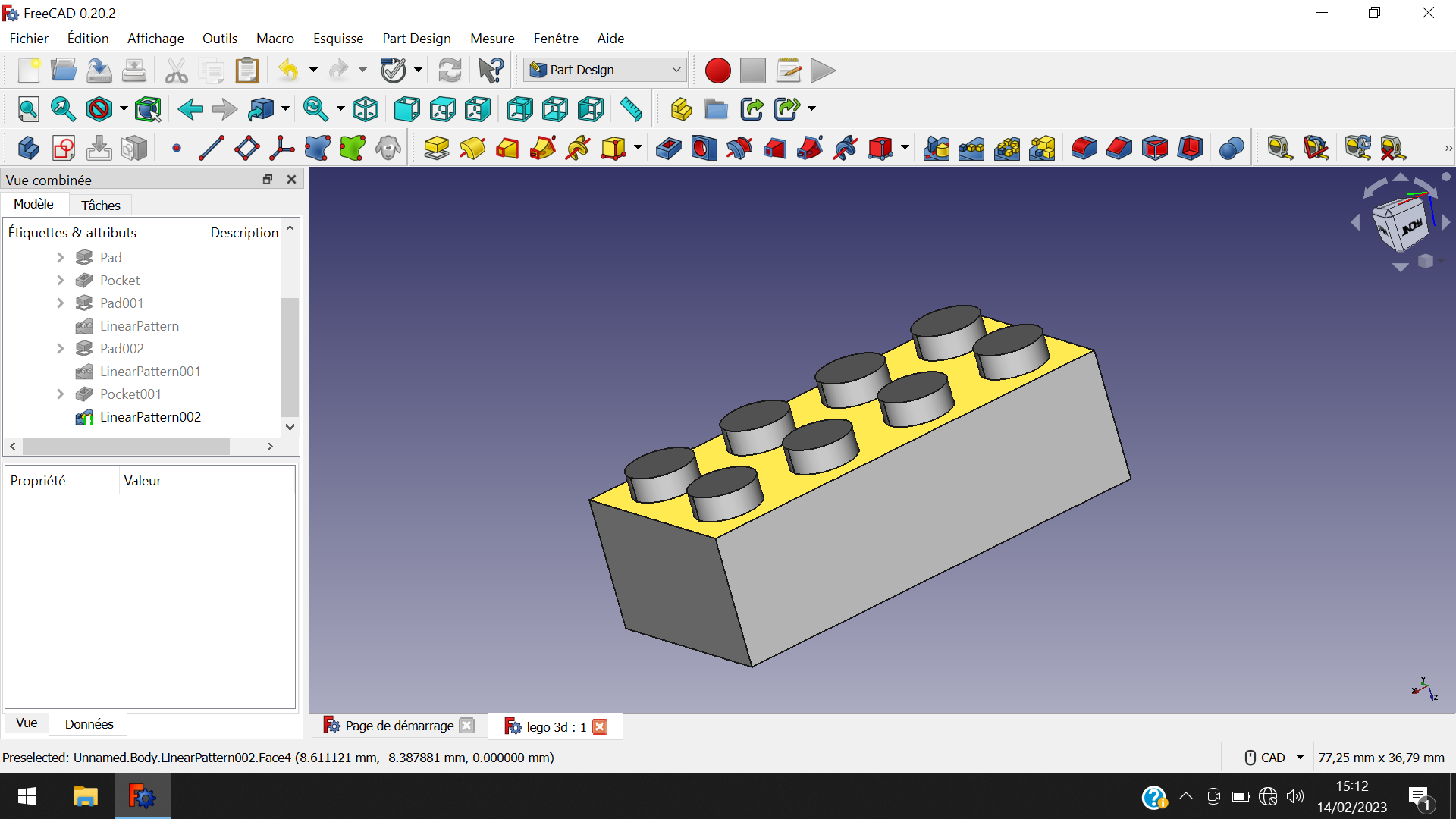
J’ai eu l’idée de modéliser 2 pièces de Lego avec le logiciel Freecad afin de pouvoir les emboîter.
Dans un premier temps, j’ai procédé à la modélisation de ma pièce en utilisant l’outil « sketch » permettant de dessiner une forme en 2D et d’ensuite pouvoir lui donner une épaisseur. J’ai choisi de faire 2 pièces avec 8 tétons pour m’assurer qu’elles tiennent bien ensemble. Puis, grâce à l’outil cavité, j’ai pu modifier la forme de mon rectangle d’origine.
Les dimensions de ma piece sont les suivantes :
- Pavé : longueur = 31,8mm ; largeur = 15,8mm ; hauteur = 9,6mm
- 8 Tétons supérieurs : rayon = 1,2mm ; distance par rapport au bord du pavé le plus proche = 4mm ; hauteur = 1,8mm
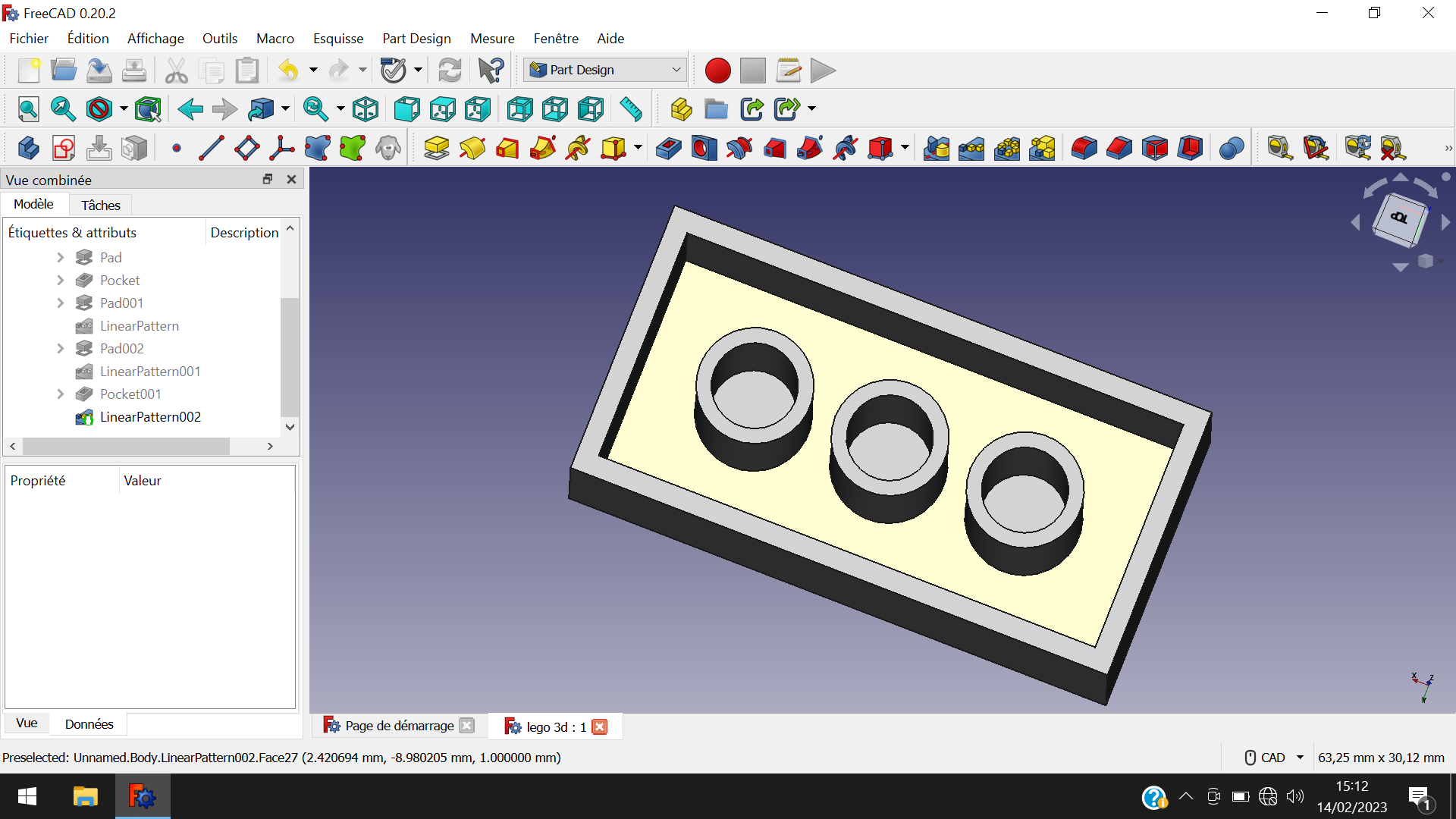
- Cavité principale : longueur = 30,6mm ; largeur = 14,6mm ; hauteur = 8,6mm
- 3 Tétons inférieurs : rayon = 3,255mm ; distance par rapport au bord du pavé le plus proche = 6,8mm ; hauteur = 8,6mm
- Cavités des 3 tétons inférieurs : rayon = 2,4mm ; profondeur = 8,6mm
On obtient alors le rendu suivant :
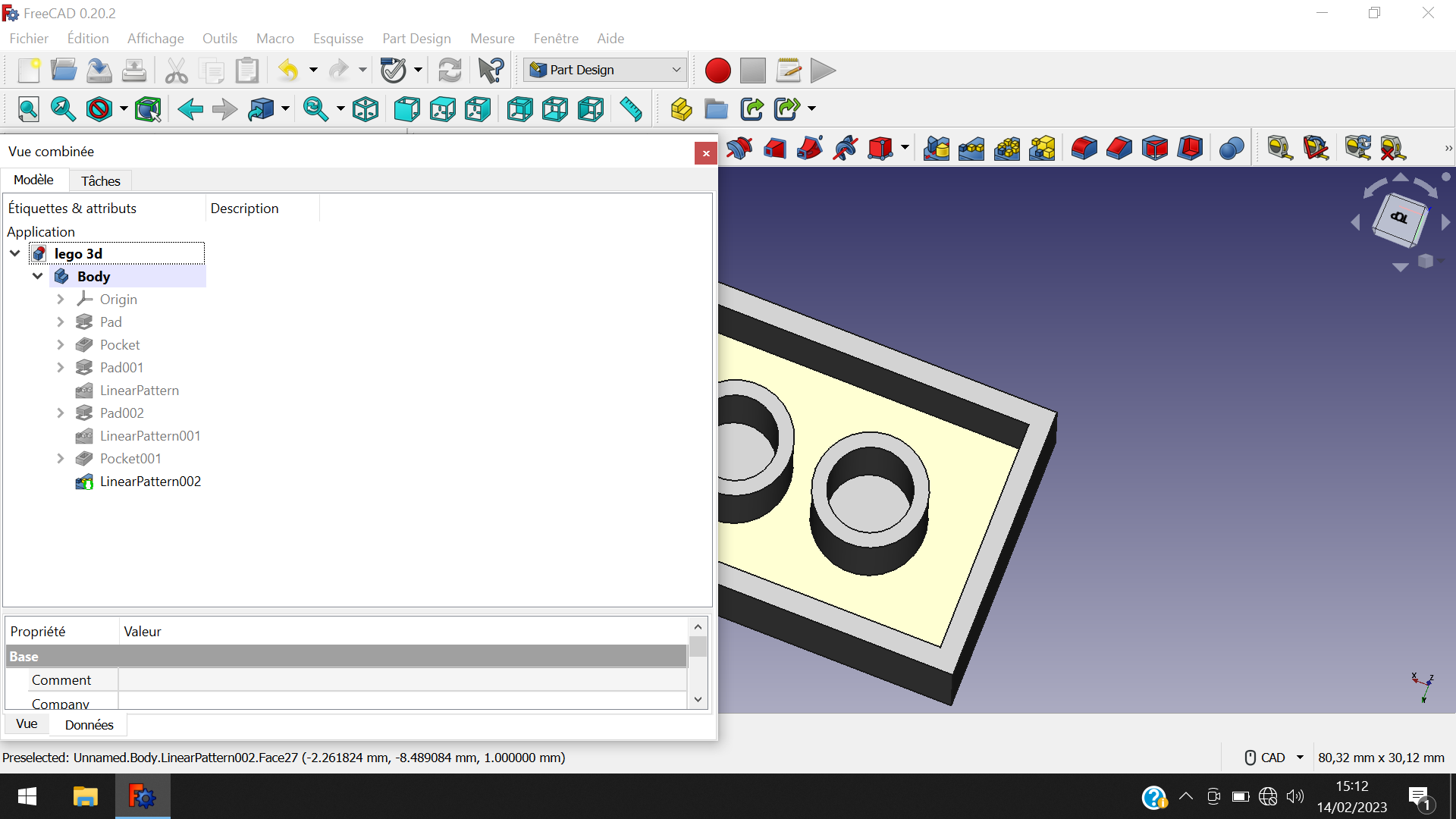
Lien du modèle 3D sous FreeCAD : lego 3d.FCStd
Ensuite, il faut l’exporter en format STL afin que l’imprimante puisse lire le fichier. Je remercie l’étudiant en Master d’entreprenariat issu d’une licence intensive qui m’a très bien expliqué le fonctionnement du logiciel IdeaMaker. Sur le logiciel, on voyait qu’il était préférable d’imprimer les pièces à l’envers, c’est-à-dire en commençant par les 8 tétons supérieurs afin de limiter les supports et la dégradation des sommets des tétons.
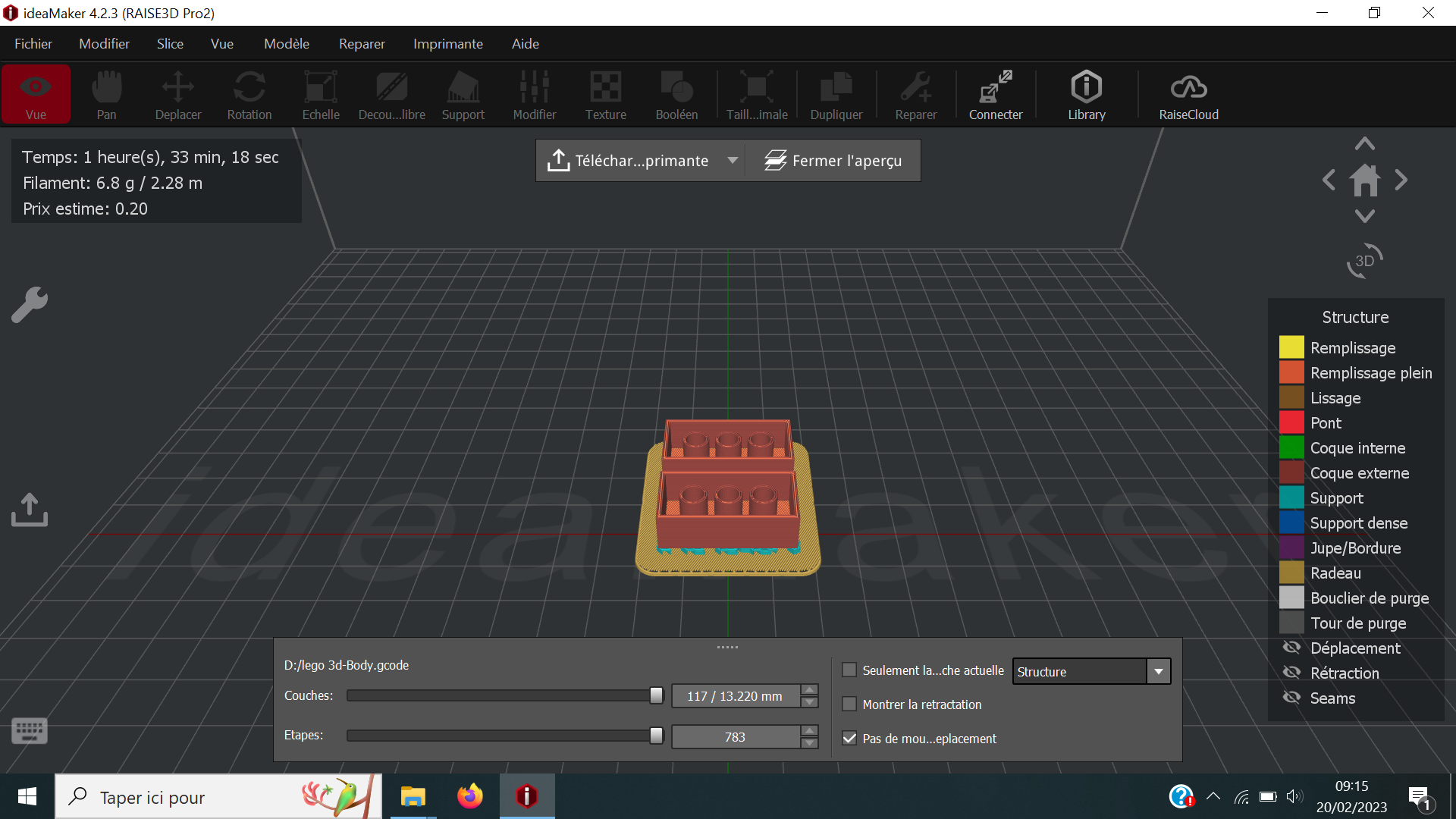
Enfin, j’ai lancé l’impression de 1h33. Le résultat finale est le suivant :


Séance 5 : Projet King Dong
Séance 5 : L'objectif de cette séance était de poser les fondations du projet que nous allons entreprendre lors de cette UE. Après de nombreuses recherches sur des sites tels que Hackaday, nous avons décidé de nous lancer dans la conception et la réalisation d'une sonnette. Celle-ci devra remplir le cahier des charges suivant:
- Sonner lorsque l'on appuie sur son bouton
- Se mettre à filmer lorsqu'un mouvement est détecté a proximité
- Rentrer dans un pavé droit de taille 10*10*3 cm
- Pouvoir être accrochée à un mur
Un autre objectif, qui semble cependant plus complexe et que l'on considère donc pour l'instant comme facultatif, serait de faire en sorte que la vidéo captée par la sonnette soit consultable sur un téléphone par exemple, idéalement vient un feed en direct.
Afin de réaliser ce projet, nous avons dressé une liste du matériel nécessaire (en dehors de ce qui est déjà disponible au FabLab) et des sites où leur achat est possible au plus petit prix :
- ESP 32 Cam Module
- Capteur PIR
- Arduino Push Button
- Arduino Speaker
Séance 6 : Tests des capteurs pour notre projet
Séance 6 : Durant cette séance, nous avons testé deux capteurs pouvant remplir la tâche de détecter un mouvement ou une présence. Dans un premier temps, nous avons testé un capteur à ultrason : Ultrasonic Distance Sensor permettant de déterminer la distance entre le capteur et un objet présent devant le capteur.. Le résultat a été plutôt satisfaisant, le seul défaut pouvant être qu'il ne capte que très peu sur les côtés. Pour tester ce capteur, nous avons utilisé ce code.
//Make sure to install
#include <M5Stack.h>
#include "Ultrasonic.h"
Ultrasonic ultrasonic(22);
void setup()
{
M5.begin();
}
void loop()
{
long RangeInInches;
long RangeInCentimeters;
RangeInCentimeters = ultrasonic.MeasureInCentimeters(); // two measurements should keep an interval
M5.Lcd.setCursor(10, 0);
M5.Lcd.print(RangeInCentimeters);//0~400cm
//M5.Speaker.tone(RangeInCentimeters, 200);
delay(250);
}Ensuite, nous avons testé un capteur de mouvement : Mini PIR Motion Sensor. Nous avons eu du mal à le faire fonctionner mais nous avons finalement trouvé un code fonctionnel. Finalement, nous pensons utiliser le capteur de mouvement qui permet d'avoir un angle plus large. Voici le code utilisé pour le test.
#include <M5Stack.h>
void setup() {
M5.begin();
Serial.begin(115200);
M5.Lcd.clear(BLACK);
M5.Lcd.setTextColor(YELLOW);
M5.Lcd.setTextSize(2);
M5.Lcd.setTextSize(2);
M5.Lcd.setCursor(80, 0);
M5.Lcd.println("PIR example");
Serial.println("PIR example: ");
M5.Lcd.setCursor(65, 10);
M5.Lcd.setTextColor(WHITE);
pinMode(36, INPUT);
}
void loop() {
M5.Lcd.setCursor(0,25); M5.Lcd.print("Status: ");
M5.Lcd.setCursor(0,45); M5.Lcd.print("Value: ");
M5.Lcd.fillRect(95,25,200,25,BLACK);
M5.Lcd.fillRect(95,45,200,25,BLACK);
if(digitalRead(36)==1){
M5.Lcd.setCursor(95, 25);M5.Lcd.print("Sensing");
M5.Lcd.setCursor(95, 45);M5.Lcd.print("1");
Serial.println("PIR Status: Sensing");
Serial.println(" value: 1");
}
else{
M5.Lcd.setCursor(95, 25);M5.Lcd.print("Not Sensed");
M5.Lcd.setCursor(95, 45);M5.Lcd.print("0");
Serial.println("PIR Status: Not Sensed");
Serial.println(" value: 0");
}
delay(500);
M5.update();
}
Séance 7 : Programmation des capteurs
Séance 7 :
Dans cette séance, nous avons dessiné la boite de notre sonnette. Grâce au site MakerCase, nous avions juste à rentrer les dimensions de notre boite :
- Largeur : 10cm
- Longueur : 15cm
- Profondeur : 7cm
Nous avons aussi rajouté 3 trous qui permettront de faire passer la caméra, le bouton et le capteur de mouvement.
Ensuite, nous devons programmer une sonnerie qui se déclenchera dès lors que le bouton de la sonnette sera enclenché. Pour ce faire, nous avons dans un premier temps utiliser un haut parleur, le Arduino Speaker 1.1, et défini une sonnerie trouvé sur Hackster.io avec le code
#define NOTE_B0 31
#define NOTE_C1 33
#define NOTE_CS1 35
#define NOTE_D1 37
#define NOTE_DS1 39
#define NOTE_E1 41
#define NOTE_F1 44
#define NOTE_FS1 46
#define NOTE_G1 49
#define NOTE_GS1 52
#define NOTE_A1 55
#define NOTE_AS1 58
#define NOTE_B1 62
#define NOTE_C2 65
#define NOTE_CS2 69
#define NOTE_D2 73
#define NOTE_DS2 78
#define NOTE_E2 82
#define NOTE_F2 87
#define NOTE_FS2 93
#define NOTE_G2 98
#define NOTE_GS2 104
#define NOTE_A2 110
#define NOTE_AS2 117
#define NOTE_B2 123
#define NOTE_C3 131
#define NOTE_CS3 139
#define NOTE_D3 147
#define NOTE_DS3 156
#define NOTE_E3 165
#define NOTE_F3 175
#define NOTE_FS3 185
#define NOTE_G3 196
#define NOTE_GS3 208
#define NOTE_A3 220
#define NOTE_AS3 233
#define NOTE_B3 247
#define NOTE_C4 262
#define NOTE_CS4 277
#define NOTE_D4 294
#define NOTE_DS4 311
#define NOTE_E4 330
#define NOTE_F4 349
#define NOTE_FS4 370
#define NOTE_G4 392
#define NOTE_GS4 415
#define NOTE_A4 440
#define NOTE_AS4 466
#define NOTE_B4 494
#define NOTE_C5 523
#define NOTE_CS5 554
#define NOTE_D5 587
#define NOTE_DS5 622
#define NOTE_E5 659
#define NOTE_F5 698
#define NOTE_FS5 740
#define NOTE_G5 784
#define NOTE_GS5 831
#define NOTE_A5 880
#define NOTE_AS5 932
#define NOTE_B5 988
#define NOTE_C6 1047
#define NOTE_CS6 1109
#define NOTE_D6 1175
#define NOTE_DS6 1245
#define NOTE_E6 1319
#define NOTE_F6 1397
#define NOTE_FS6 1480
#define NOTE_G6 1568
#define NOTE_GS6 1661
#define NOTE_A6 1760
#define NOTE_AS6 1865
#define NOTE_B6 1976
#define NOTE_C7 2093
#define NOTE_CS7 2217
#define NOTE_D7 2349
#define NOTE_DS7 2489
#define NOTE_E7 2637
#define NOTE_F7 2794
#define NOTE_FS7 2960
#define NOTE_G7 3136
#define NOTE_GS7 3322
#define NOTE_A7 3520
#define NOTE_AS7 3729
#define NOTE_B7 3951
#define NOTE_C8 4186
#define NOTE_CS8 4435
#define NOTE_D8 4699
#define NOTE_DS8 4978
#define REST 0
#define END -1
int melody[] = {
NOTE_E5, NOTE_DS5, //1
NOTE_E5, NOTE_DS5, NOTE_E5, NOTE_B4, NOTE_D5, NOTE_C5,
NOTE_A4, NOTE_C4, NOTE_E4, NOTE_A4,
NOTE_B4, NOTE_E4, NOTE_GS4, NOTE_B4,
NOTE_C5, REST, NOTE_E4, NOTE_E5, NOTE_DS5,
NOTE_E5, NOTE_DS5, NOTE_E5, NOTE_B4, NOTE_D5, NOTE_C5,
NOTE_A4, NOTE_C4, NOTE_E4, NOTE_A4,
NOTE_B4, NOTE_E4, NOTE_C5, NOTE_B4,
NOTE_A4 , REST, END
};
// note durations: 8 = quarter note, 4 = 8th note, etc.
int noteDurations[] = { //duration of the notes
4, 4,
4, 4, 4, 4, 4, 4,
4, 4, 4, 4,
4, 4, 4, 4,
4, 4 ,4, 4, 4,
4, 4, 4, 4, 4, 4,
4, 4, 4, 4,
4, 4, 4, 4,
1, 2, 20
};
int speed=90; //higher value, slower notes
void setup() {
Serial.begin(9600);
for (int thisNote = 0; melody[thisNote]!=-1; thisNote++) {
int noteDuration = speed*noteDurations[thisNote];
tone(3, melody[thisNote],noteDuration*.95);
Serial.println(melody[thisNote]);
delay(noteDuration);
noTone(3);
}
}
void loop() {
}
Séance 8 : Caméra AI Module Vision
Dans cette séance, nous avons essayé de programmer la caméra AI Module vision. Nous avons dans un premier temps dû souder un tatata sur la caméra afin de pouvoir la relier à une carte Arduino ou un M5Stack. Pour ce faire, nous avons souder un truc femelle sur la carte de la caméra et un truc mâle sur le tatata.

Une fois cela fait, nous sommes ensuite revenu sur la configuration de la caméra. Nous avons dû chercher sur de nombreux sites car cette caméra est relativement récente et la documentation sur celle-ci se fait extrêmement rare ou bien pour des applications très spécifiques. Que ce soit sur (nom du site), (nom du site) ou (nom du site), la documentation est faite à partir d’autres interfaces (?) que l’Arduino ou le M5Stack comme le Rasperry nous rendant ainsi impossible l’exploitation de la Caméra AI Module Vision. Par ailleurs, nos capacités en informatique et en codage ne nous permettant pas de développer un code de A à Z, nous avons décidé de mettre fin au projet King Dong.
Cette séance nous a montré que la documentation est vraiment quelque chose de fondamental, c’est pourquoi nous vous avons mis tous les liens que nous avons trouvés afin de rassembler le plus d’information possible pour les prochaines personnes qui utiliseront cette caméra.