Projet Velidar
Nom du projet : Vélidar
Coordonnées :
- Younes Boujedli : younes.boujedli@gmail.com
Présentation du contexte :
Inciter les cyclistes urbains à utiliser le vélo comme moyen de transport quotidien, en mettant un frein au sentiment
d'insécurité en ville, grâce à un dispositif intégrable à un vélo électrique pour permettre la détection des véhicules dans l'angle mort des cyclistes.
Description du produit :
Le dispositif est composé de deux modules, un module de détection de véhicule et un module de visualisation du signal, les deux dispositifs sont reliés par un câble.
Module de détection : Fixation sur la tige de selle, il a pour objectif de détecter et évaluer la vitesse des véhicules en mouvement sur une distance de 2 à 15 mètres avec un angle de détection important (technologie Doppler). En plus, il déterminera la distance du véhicule en approche à une distance de 0 à 8 mètres (Technologie Lidar).
Module de visualisation : Fixation sur le guidon, ce module transmet à l'utilisateur un signal lumineux (bar led 10 segment) et devra être visible en plein jour. Le module de visualisation est composé de 10 led avec 4 couleurs différentes (bleu, verte, jaune, rouge), qui s'allume en fonction d'un score de danger calculé par le module de détection allant de 0 à 9.
Matériaux / Outils / Machines :
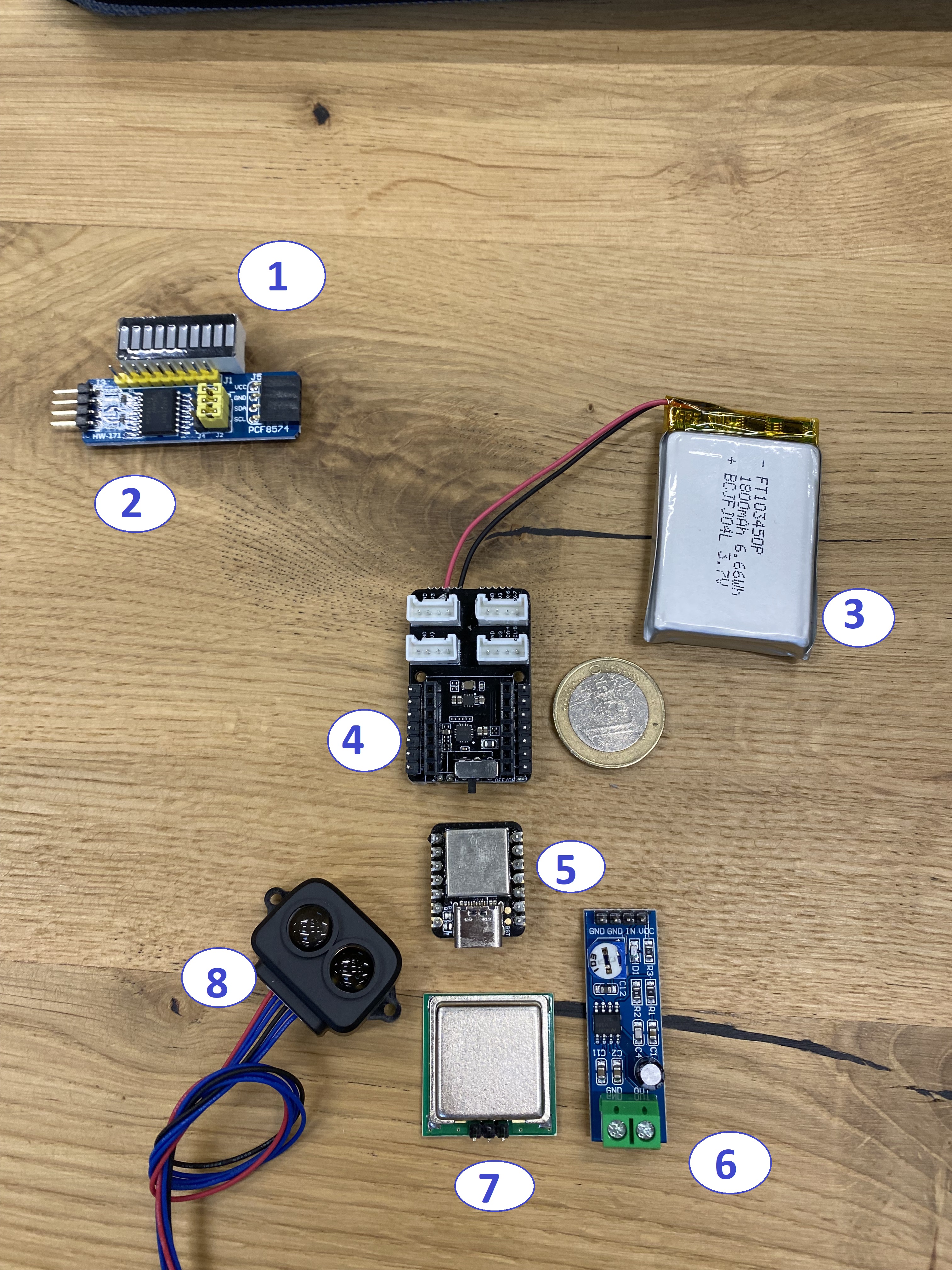
module visualisation :
1 : bar 10 led segment prix 0,91€ (satisfait du composant)
2: multiplexeur i2C (prix 0,92€) #pour optimiser l'utilisation des pin sur la board ( voir utilité du composant ou alternative ?)
Module détection :
3: batterie lipo 3,7V 1800mAh prix 4,82€ #(certains composants nécessite une tension de 5V, batterie pas assez puissante ?)
4: batterie management (prix 4,54 €) # interrupteur intégré et permet la gestion de la batterie (utile ?)
5: Micro-controleur Xiao SAMD21 avec port usb-C (4,89€ ) (alternative ?)
6: module d'amplification pour doppler prix ( 0,35€)
7: Module doppler 24G prix ( 3,39€) # détecte les véhicules et leurs vitesses à une grande portée mais pas la distance
8: Lidar Luna 8m de portée prix (24,38€) # angle de détection très restreint et très cher, alternative Vl53l1X ? portée 4m prix 16,87€
Technologie de Détection :
- Choix du capteur : Utilisation de capteurs LIDAR (très peu d'angle de détection -> très linéaire et peu de distance), mais très précis ou radar à ondes millimétriques Doppler pour un angle plus grand mais pas de distance. ??
- Détection d'objet en mouvement uniquement (vélo, voiture, scooter) minimum 10km/h
- Détection d'objet en mouvement minimum 45° principalement véhicule arrivant derrière le cycliste mais également sur la gauche (détection sur le coté droit non nécessaire)
- Voir pour l'intégration de capteurs additionnels (optionnel) pour améliorer la détection.
Montage et installation :
- Système de montage facile et sécurisé, compatible avec différents modèles de vélos.
- Coque résistance à l'eau (pluie) et aux chocs. (à définir)
Conformité et Sécurité :
- Conformité aux normes de sécurité routière et aux réglementations électroniques.
- Tests de sécurité et de durabilité.
Dimensions et Poids :
- Conception compacte et légère pour minimiser l'impact sur la maniabilité du vélo.
Budget et Coût
- Estimation du coût de la matière première prototype 30 euros
Mise en application : 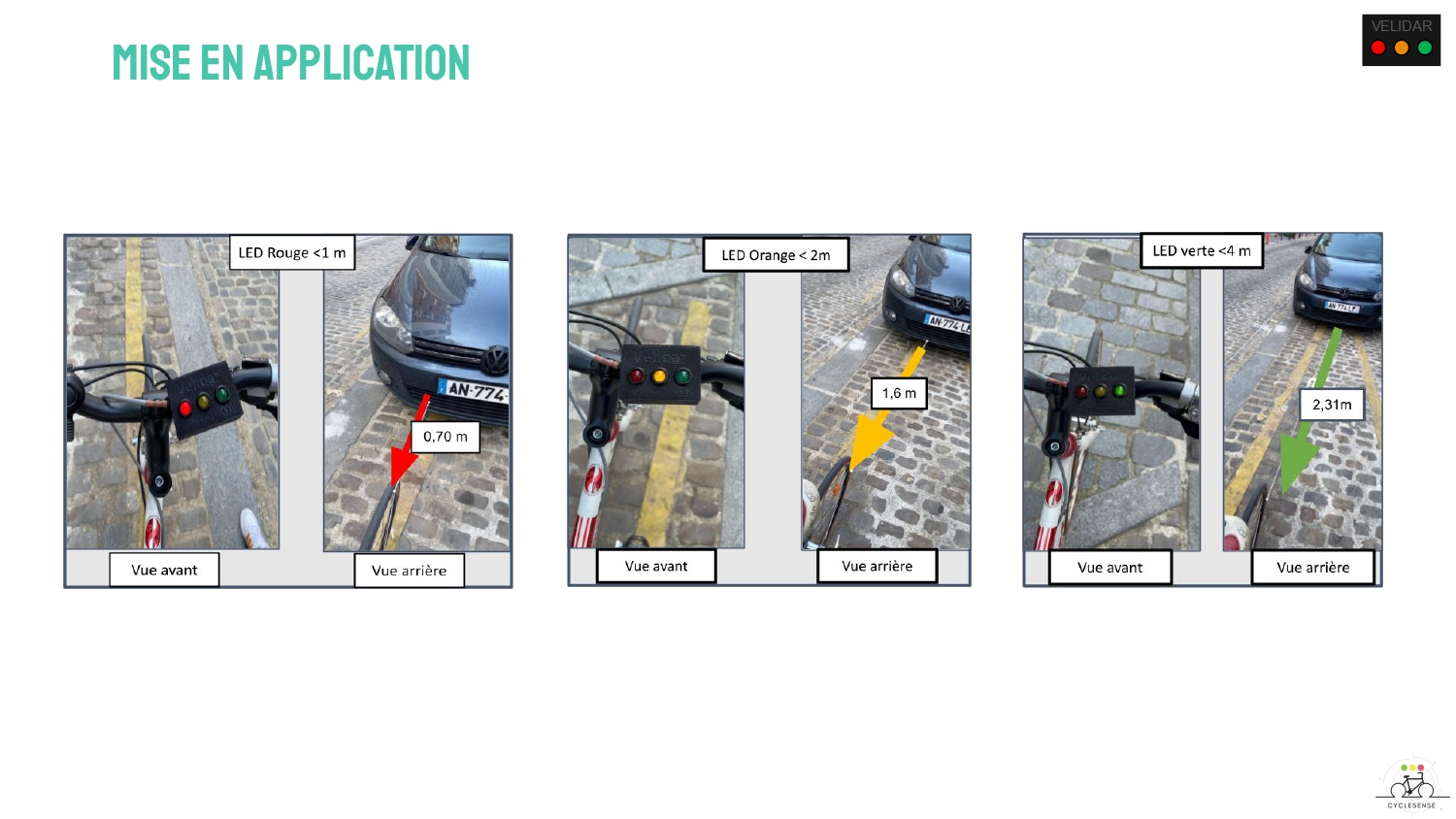
Annexe :
Tableau scoring pour allumage Led
(0 = , led bleu; entre 1 et 4 = , led verte; entre 5 et 7 : , led Jaune; score supérieur à 8 :
| Score calculé par le module de détection | situation | Couleur Led |
| 0 | aucun véhicule détecté à moins de 15 mètres | Bleu |
| entre 1 et 4 | Véhicule détecté par le doppler uniquement à une vitesse d'approche inférieur à 15km/h de différence par rapport au cycliste ( Véhicule entre 15 et 8 mètre) | Vert |
| entre 5 et 7 | Véhicule détecté uniquement par le doppler à une vitesse supérieur à 15km/h de différence par rapport au cycliste OU véhicule détecté par le Doppler à une vitesse d'approche inférieur à 15km/h et par le Lidar à une distance entre 8 et 4 mètres | Jaune |
| supérieur à 8 | Véhicule détecté par le Doppler uniquement à une vitesse d'approche supérieur à 30km/h (véhicule entre 15 et 8 mètres) OU véhicule détecté par le Doppler à une vitesse d'approche supérieur à 15km/h et par le Lidar à une distance entre 8 et 4 mètres OU Véhicule détecté par le Doppler à une vitesse d'approche inférieur à 15km/h et par le Lidar à une distance entre 4 et 0 mètres | Rouge |
Problèmes :
Utilité ou pas fusion des capteurs
-Doppler améliorer la puissance et tester en condition réelle ? Donne la vitesse mais pas la distance ?
Modéliser une Coque : impression 3D, concevoir un modèle en impression 3d étanche à la pluie
Le code ? : rester sur arduino ? ou Python ? utiliser Raspberry