Projet Velidar
Projet entrepreneuriat dans le cadre de PEPITE Sorbonne
début du projet : 15/11/22 -
Nom du projet : Vélidar
Coordonnées :
- Younes Boujedli : younes.boujedli@gmail.com
Présentation du sujetcontexte :
Inciter fichierles jointcyclistes urbains à utiliser le vélo comme moyen de transport quotidien, en mettant un frein au sentiment
d'insécurité en ville, grâce à un dispositif intégrable à un vélo électrique pour permettre la détection des véhicules dans l'angle mort des cyclistes.
Description du produit :
Le dispositif est composé de deux modules, un module de détection de véhicule et un module de visualisation du signal, les deux dispositifs sont reliés par un câble.
Module de détection : Fixation sur la tige de selle, il a pour objectif de détecter et évaluer la vitesse des véhicules en mouvement sur une distance de 2 à 15 mètres avec un angle de détection important (technologie Doppler). En plus, il déterminera la distance du véhicule en approche à une distance de 0 à 8 mètres (Technologie Lidar).
Module de visualisation : Fixation sur le guidon, ce module transmet à l'utilisateur un signal lumineux (bar led 10 segment) et devra être visible en plein jour. Le module de visualisation est composé de 10 led avec 4 couleurs différentes (bleu, verte, jaune, rouge), qui s'allume en fonction d'un score de danger calculé par le module de détection allant de 0 à 9.
Matériaux / Outils / Machines :
microcontrôleurs Xiao SAMD21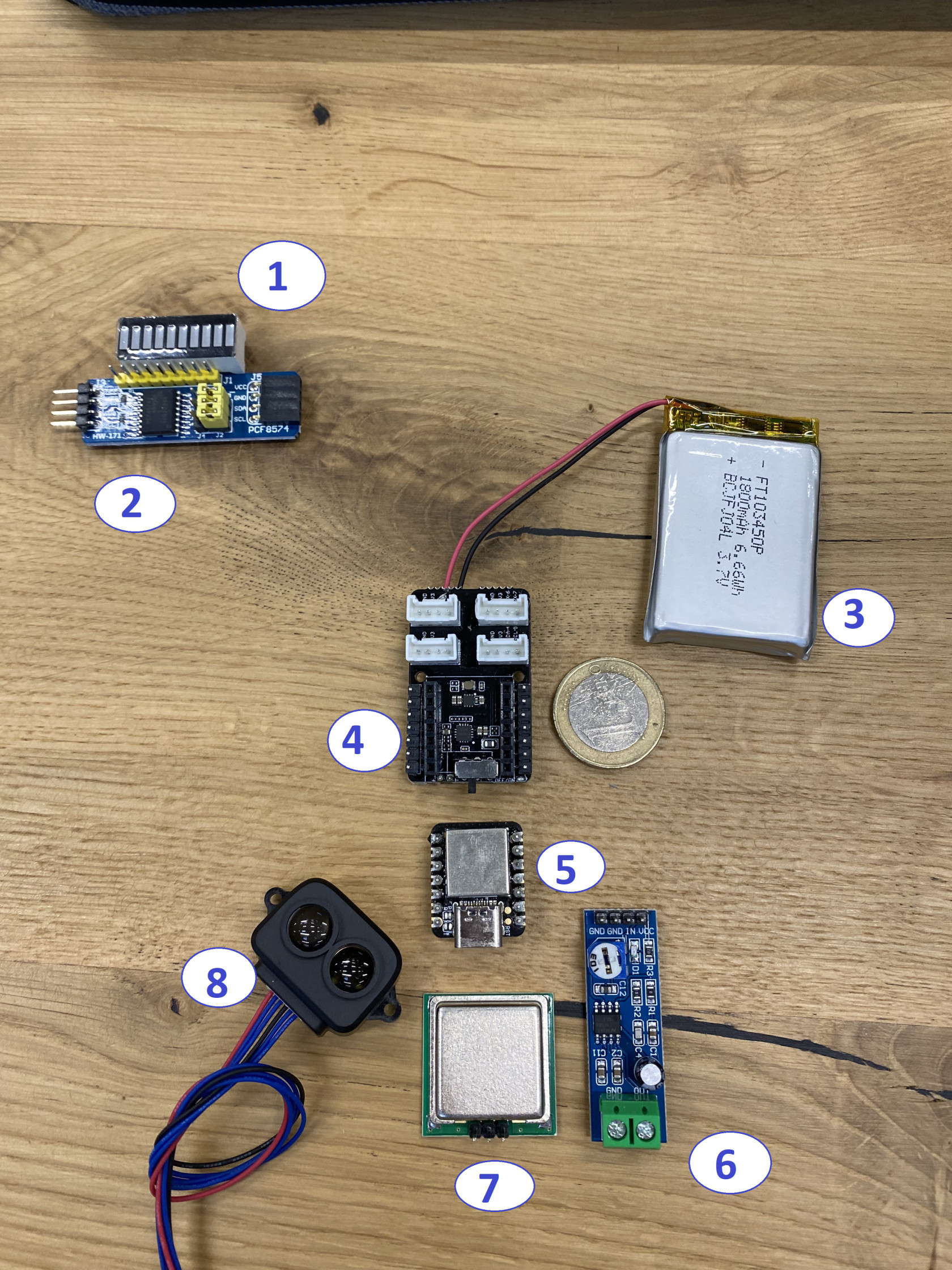
LED 10 segmentslidar VL53l0X ou Doppler HB100
Cahier des charges :
Objectif du Projet :
- visualisation :
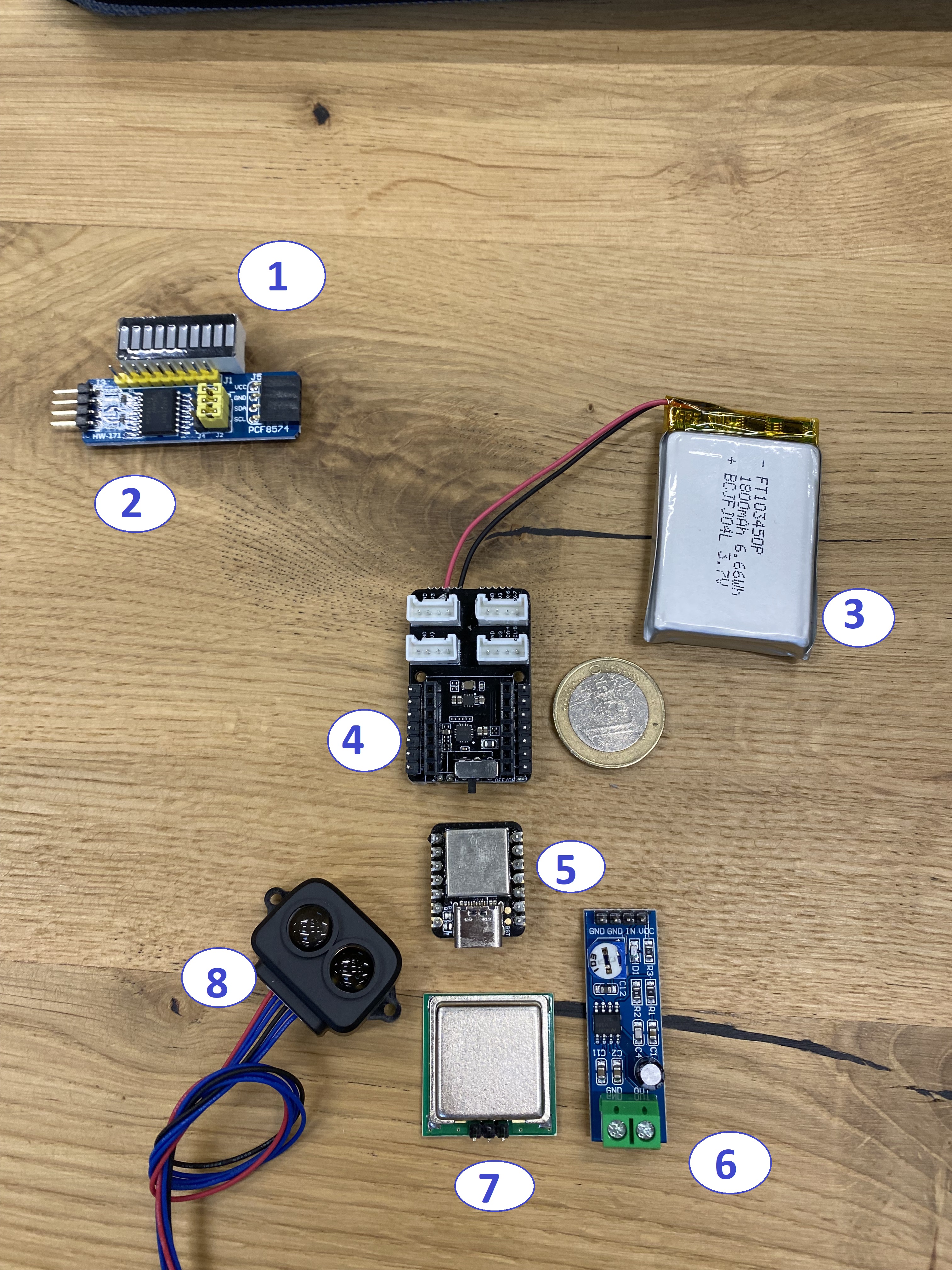
1 : bar 10 led segment prix 0,91€ (satisfait du composant)
2: multiplexeur i2C
Développer(prixun0,92€)détecteur d'angle mort#pourvélos,optimisernommél'utilisation"Velidar",desvisantpinà améliorersur lasécuritéboarddescyclistes(envoirlesutilitéalertantdu composant ou alternative ?)Module détection :
3: batterie lipo 3,7V 1800mAh prix 4,82€ #(certains composants nécessite une tension de 5V, batterie pas assez puissante ?)
4: batterie management (prix 4,54 €) # interrupteur intégré et permet la gestion de la
présencebatteriede(utile ?)5: Micro-controleur Xiao SAMD21 avec port usb-C (4,89€ ) (alternative ?)
6: module d'amplification pour doppler prix ( 0,35€)
7: Module doppler 24G prix ( 3,39€) # détecte les véhicules
ou d'obstacles danset leursanglesvitessesmorts.à
module
8: Lidar Luna 8m de portée prix (24,38€) # angle de détection très restreint et très cher, alternative Vl53l1X ? portée 4m prix 16,87€
Fonctionnalités Principales :
Détection en temps réel des véhicules s'approchent sur l'arrière du cycliste et le coté gauche.Alerte visuelle indiquant la proximité de l'approche du véhicule.Fonctionnement dans diverses conditions météorologiques et environnementales.
Technologie de Détection :
- Choix du capteur : Utilisation de capteurs LIDAR (très peu d'angle de détection -> très linéaire et peu de distance), mais très précis ou radar à ondes millimétriques Doppler pour un angle plus grand mais
peupas desensibilité.distance. ?? Portée minimum 15 mètres, portée maximum 25 mètres- Détection d'objet en mouvement uniquement (vélo, voiture, scooter) minimum 10km/h
- Détection d'objet en mouvement minimum 45° principalement véhicule arrivant derrière le cycliste mais également sur la gauche (détection sur le coté droit non nécessaire)
- Voir pour l'intégration de capteurs additionnels (optionnel) pour améliorer la détection.
Microcontrôleur et Logiciel :
Microcontrôleur compact pour le traitement des données des capteurs.
Utilisateur de l'interface :
Indicateurs LED avec différentes couleurs en fonction de l'approche du véhicule (rouge très proche, orange en approche, verte détection du véhicule à une portée importante)
Alimentation :
Batterie rechargeable avec une autonomie d'au moins 20 heures d'utilisation continue.(prototype)Système de charge facile via USB-C
Montage et installation :
- Système de montage facile et sécurisé, compatible avec différents modèles de vélos.
- Coque résistance à l'eau (pluie) et aux chocs. (à définir)
Conformité et Sécurité :
- Conformité aux normes de sécurité routière et aux réglementations électroniques.
- Tests de sécurité et de durabilité.
Dimensions et Poids :
- Conception compacte et légère pour minimiser l'impact sur la maniabilité du vélo.
Budget et Coût
- Estimation du coût de
productionlapourmatièremaintenirpremièreleprototypeprix30final compétitif.euros(inférieur à 100 euros)
Prototype 1 : 3x Led 10mm dans un boitier voir image du boitier visualisation + détection du boitier avec microcontrôleur (Xiao SAMD21) + Lidar (Vl53lX1)
Mise en application :
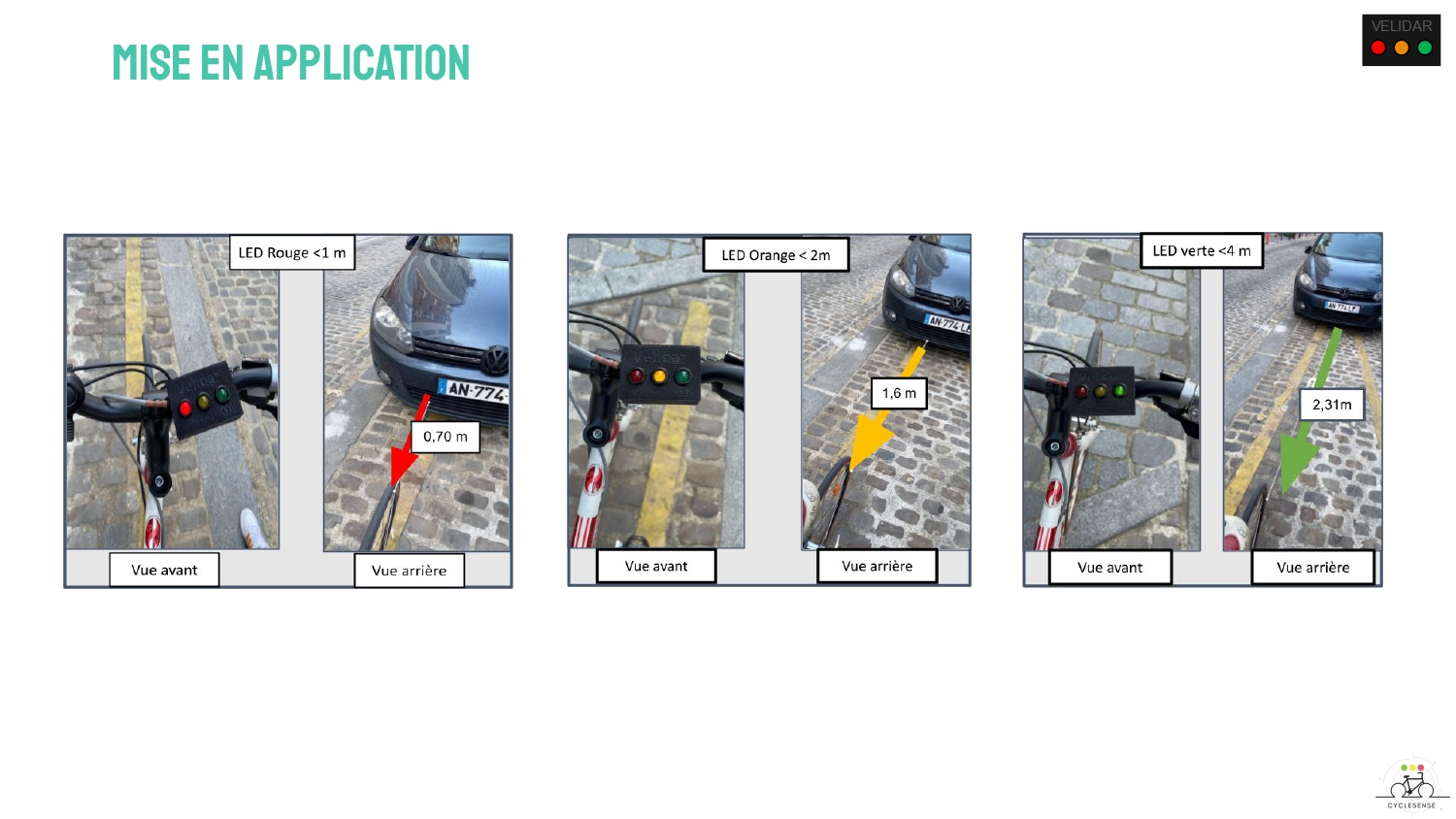
Point à améliorer le prototype 1Annexe :
Led 10mm : pas assez puissante
Lidar : très linéaire portée insuffisante, détection d'objet fixe à retirer et angle de détection insuffisante
Prototype 2 : détection Doppler HB-100 + Barre Led 10 couleurs
Barre LED : très efficace, visible en journée, compacte

Doppler HB-100 : Micro-Wave détection de vitesse du véhicule intéressante, moins cher, angle de détection plus important, portée plus importante, moins compact.
Problèmes :
CommentTableau détecterscoring lepour véhiculeallumage :Led
-Deux(0 Lidar= pour, augmenterled lableu; FoVentre ?1 ->et Donne4 la= distance, duled verte; entre 5 et 7 : , led Jaune; score supérieur à 8 :
Score calculé par le module de détection
situation
Couleur Led
0
aucun véhicule maisdétecté peutà onmoins avoirde la15 mètres
Bleu
entre 1 et 4
Véhicule détecté par le doppler uniquement à une vitesse ?d'approche inférieur à 15km/h de différence par rapport au cycliste ( Véhicule entre 15 et 8 mètre)
Vert
entre 5 et 7
Véhicule détecté uniquement par le doppler à une vitesse supérieur à 15km/h de différence par rapport au cycliste OU véhicule détecté par le Doppler à une vitesse d'approche inférieur à 15km/h et par le Lidar à une distance entre 8 et 4 mètres
Jaune
supérieur à 8
Véhicule détecté par le Doppler uniquement à une vitesse d'approche supérieur à 30km/h (véhicule entre 15 et 8 mètres) OU véhicule détecté par le Doppler à une vitesse d'approche supérieur à 15km/h et par le Lidar à une distance entre 8 et 4 mètres OU Véhicule détecté par le Doppler à une vitesse d'approche inférieur à 15km/h et par le Lidar à une distance entre 4 et 0 mètres
Rouge
Problèmes :
Utilité ou pas fusion des capteurs
-Doppler HB-100 améliorer la puissance et tester en condition réelelle ? Donne la vitesse mais pas la distance ?
Modéliser une Coque : impression 3D, concevoir un modèle en impression 3d étanche à la pluie
Le code ? : rester sur arduino ? ou Python ? utiliser Raspberry

