Radar vélo
Projet entrepreneuriat dans le cadre de PEPITE Sorbonne
début du projet : 15/11/22 -
Nom du projet : Vélidar
Coordonnées :
YounèsYounes Boujedli : younes.boujedli@gmail.com- Présentation du sujet : fichier joint
Matériaux / Outils / Machines :
- microcontrôleurs Xiao SAMD21
- LED 10 segments
- lidar VL53l0X ou Doppler HB100
Cahier des charges :
Objectif du Projet :
- Développer un détecteur d'angle mort pour vélos, nommé "Velidar", visant à améliorer la sécurité des cyclistes en les alertant de la présence de véhicules ou d'obstacles dans leurs angles morts.
Fonctionnalités Principales :
- Détection en temps réel des véhicules s'approchent sur l'arrière du cycliste et le coté gauche .
- Alerte visuelle indiquant la proximité de l'approche du véhicule.
- Fonctionnement dans diverses conditions météorologiques et environnementales.
Technologie de Détection :
- Choix du capteur : Utilisation de capteurs LIDAR (très peu d'angle de détection -> très linéaire et peu de distance), mais très précis ou radar à ondes millimétriques Doppler pour un angle plus grand mais peu de sensibilité. ??
- Portée minimum 15 mètres, portée maximum 25 mètres
- Détection d'objet en mouvement uniquement (vélo, voiture, scooter) minimum 10km/h
- Détection d'objet en mouvement minimum 45° principalement véhicule arrivant derrière le cycliste mais également sur la gauche (détection sur le coté droit non nécessaire)
- Voir pour l'intégration de capteurs additionnels (optionnel) pour améliorer la détection.
Microcontrôleur et Logiciel :
- Microcontrôleur compact pour le traitement des données des capteurs.
Utilisateur de l'interface :
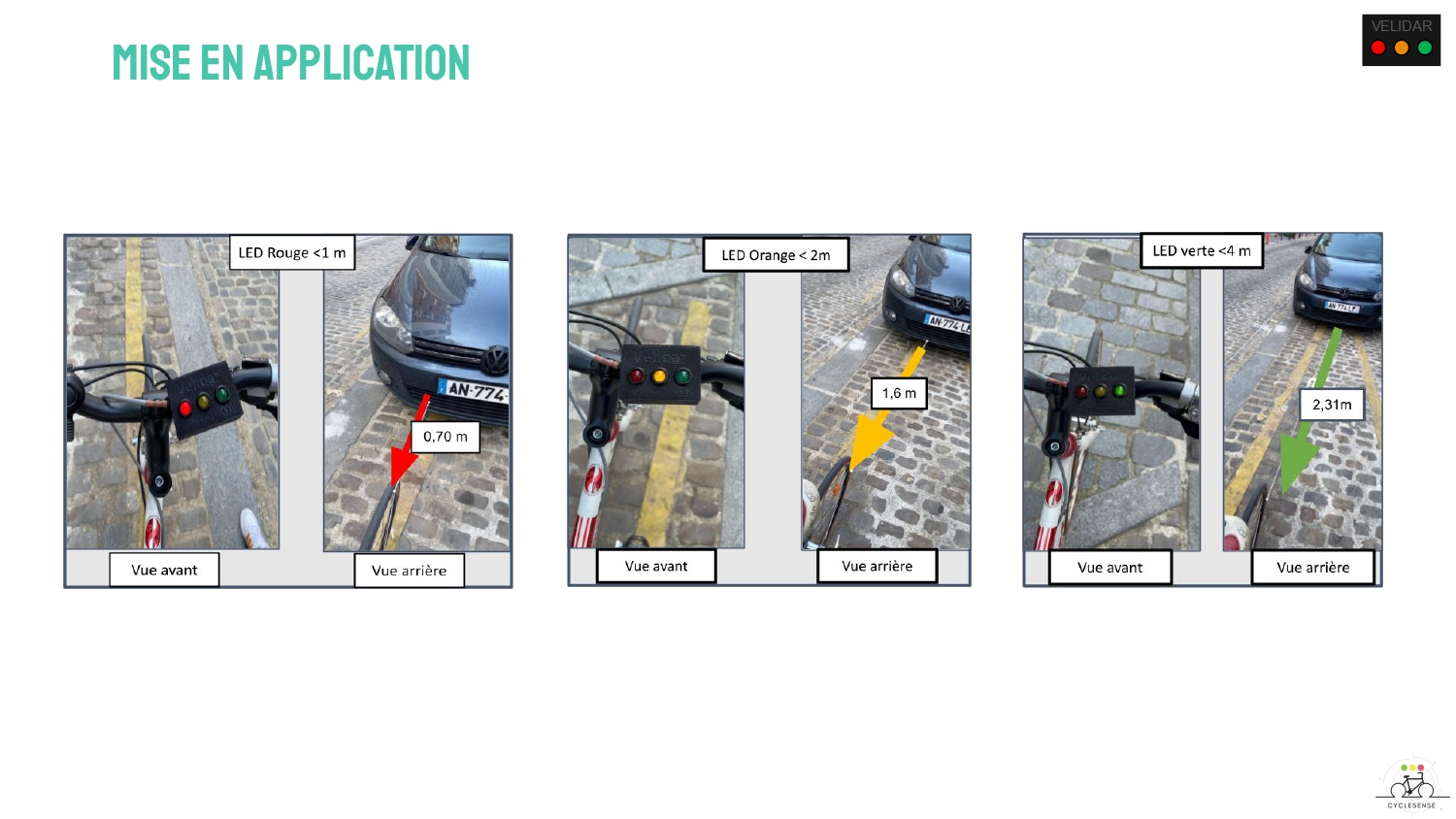
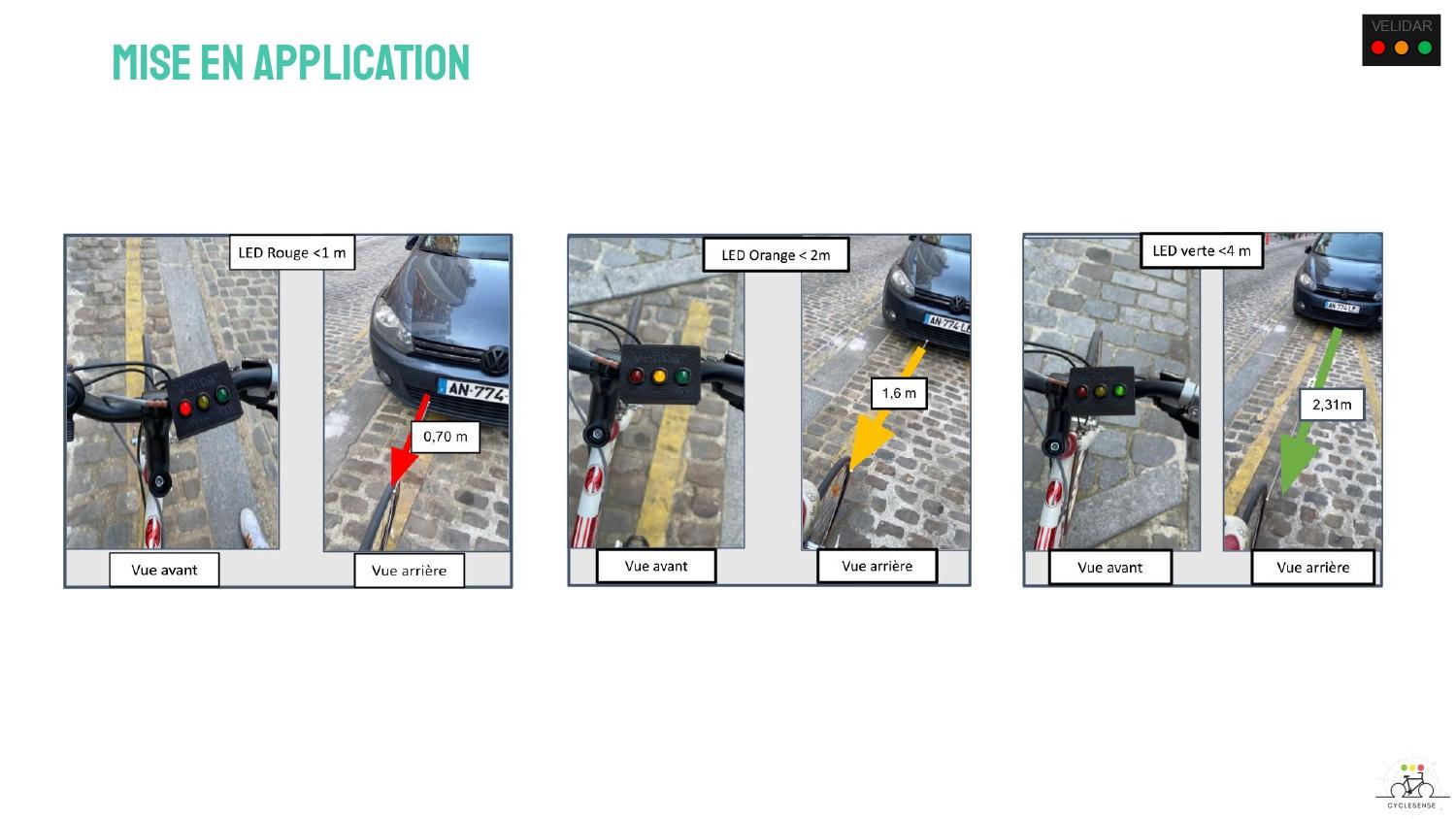
- Indicateurs LED avec différentes couleurs en fonction de l'approche du véhicule (rouge très proche, orange en approche, verte détection du véhicule à une portée importante)
Alimentation :
- Batterie rechargeable avec une autonomie d'au moins 20 heures d'utilisation continue. (prototype)
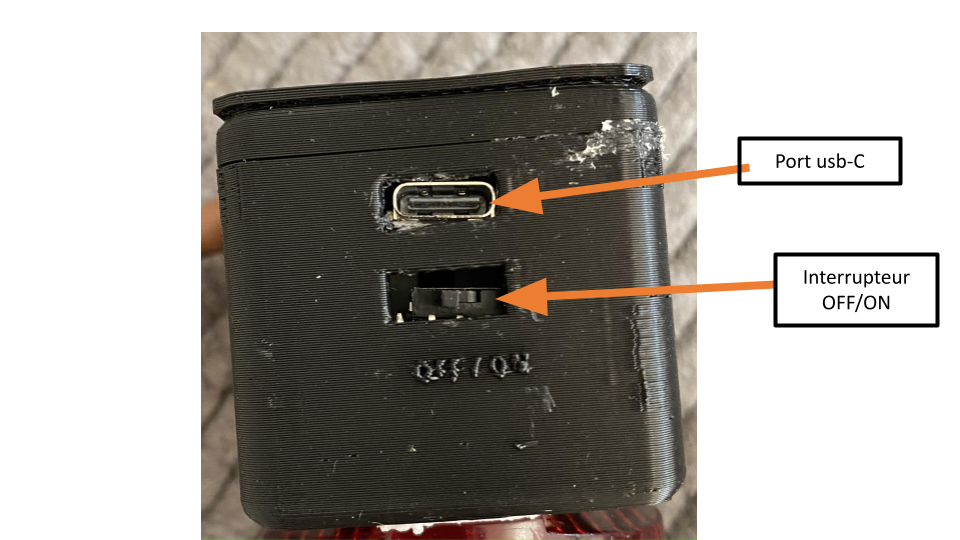
- Système de charge facile via USB-C
Montage et installation :
- Système de montage facile et sécurisé, compatible avec différents modèles de vélos.
- Coque résistance à l'eau (pluie) et aux chocs. (à définir)
Conformité et Sécurité :
- Conformité aux normes de sécurité routière et aux réglementations électroniques.
- Tests de sécurité et de durabilité.
Dimensions et Poids :
- Conception compacte et légère pour minimiser l'impact sur la maniabilité du vélo.
Budget et Coût
- Estimation du coût de production pour maintenir le prix final compétitif. (inférieur à 100 euros)
Prototype 1 : 3x Led 10mm dans un boitier voir image du boitier visualisation + détection du boitier avec microcontrôleur (Xiao SAMD21) + Lidar (Vl53lX1)
Mise en application :
Point à améliorer le prototype 1 :
- Led 10mm : pas assez puissante
- Lidar : très linéaire portée insuffisante, détection d'objet fixe à retirer et angle de détection
insufisantinsuffisante
Prototype 2 : détection Doppler HB-100 + Barre Led 10 couleurs

Barre LED : très efficace, visible en journée, compacte

Doppler HB-100 : Micro-Wave détection de vitesse du véhicule intéressante, moins cher, angle de détection plus important, portée plus importante, moins compact.
Problèmes :
Comment détecter le véhicule :
-Deux Lidar pour augmenter la FoV ? -> Donne la distance du véhicule mais peut on avoir la vitesse ?
-Doppler HB-100 améliorer la puissance et tester en condition réel ? Donne la vitesse mais pas la distance ?
Modéliser une Coque : impression 3D, concevoir un modèle en impression 3d etancheétanche à la pluie