Turbococo v.2, aka PFIT
Les fichiers sources doivent idéalement être joints à cette page grâce à l'icône trombone du menu de droite.
Des hésitations sur comment bien documenter et utiliser l'interface ? Consultez le tutoriel "Comment documenter"
Informations
- Pablo Fava
- pablo.fava@etu.sorbone-universite.fr
- Licence Troisième année Mécanique - Sciences de la Terre
- 4/02 - 31/04
- encadrants : Loïc Labrousse et Pierre Thery
Contexte
Le matin, brief des L2 en UE stage labo qui vont utiliser le système qu'on va fabriquer. Mise en contexte : les coccolithophores sont de très bons indicateurs car ce sont des algues qui sont dans la zone de mélange pour pouvoir faire la photosynthèse, à l'inverse des foraminifères qui sont des animaux qui attendent majoritairement sous la zone de mélange. Les coccolithophores sont donc plus adaptés comme marqueur de la température passée.
Problème : leur taille de l'ordre du micromètre rend leur isolement par filtrage complexe.
Le protocole mis au point consiste donc à faire vibrer une micro membrane filtrante à l'aide d'une cuve à ultrasons. Le filtre étant très fin, l'opération s'étend sur des laps de temps conséquents. L'idée est donc d'automatiser le remplissage du cylindre et l'agitation.
Objectifs
- Transférer le montage précédent sur une Arduino nano 33ioT et créer une application dans le cloud arduino pour contrôler le montage à distance
- réaliser une série de tests pour déterminer l'efficacité de l'agitation de la solution et du filtrage
- lister le matériel nécessaire pour faciliter la réplication du montage.
Ajouter au moins une image de votre projet
Matériel
- 1 carte arduino nano 33ioT
- deux capteurs de niveau d'eau
- un moteur
- un shield moteur
- câbles arduino
- bouchons et fixations et impression 3D
- pompes
- smartphone
Machines utilisées
- imprimantes 3D
- fer à souder
Construction
(Fichiers, photos, code, explications, paramètres d'usinage, photos, captures d'écran...)
Étape 1
----
Étape 2
----
Étape 3
----
Journal de bord
Avancée du projet à chaque étape, difficultés rencontrées, modifications et adaptations (facultatif pour les petits projets)
10/02/2023
On commence à transférer le projet de l'Arduino Uno vers la nano mais on se rend vite compte qu'on n'a pas la bonne Arduino nano, il nous faut la 33IOT. Fabrice la commande pour la semaine suivante. ça nous bloque beaucoup parce qu'on ne peut pas commencer l'application non plus mais on est à peu près certain.e.s que tout fonctionne en-dehors de cela donc la session de la semaine suivante devrait être assez efficace.
17/02/2023
Ismaël a réussi à souder l'Arduino 33IOT et tout fonctionne. Seul problème : les capteurs ne détectent pas la présence d'eau. On essaie de serrer + les vis, sinon il faudra peut-être changer de capteur ou trouver une autre solution.
En attendant on doit modéliser la pièce manquante pour que l'hélice soit plus solide et voir si on a une tige de longueur suffisante pour passer sous le niveau du capteur bas.
On a réglé le problème en changeant les capteurs. Ils sont un peu moins réactifs mais ça ne gêne pas le fonctionnement global donc on les garde.
On a modélisé la pièce aux bonnes dimensions, mais on n'a pas de tige assez longue pour les nouveaux tubes du laboratoire. Pierre Théry va en commander à nouveau ou alors on peut en fabriquer une en tiges de métal mais on pense que ça ne sera pas assez rigide.
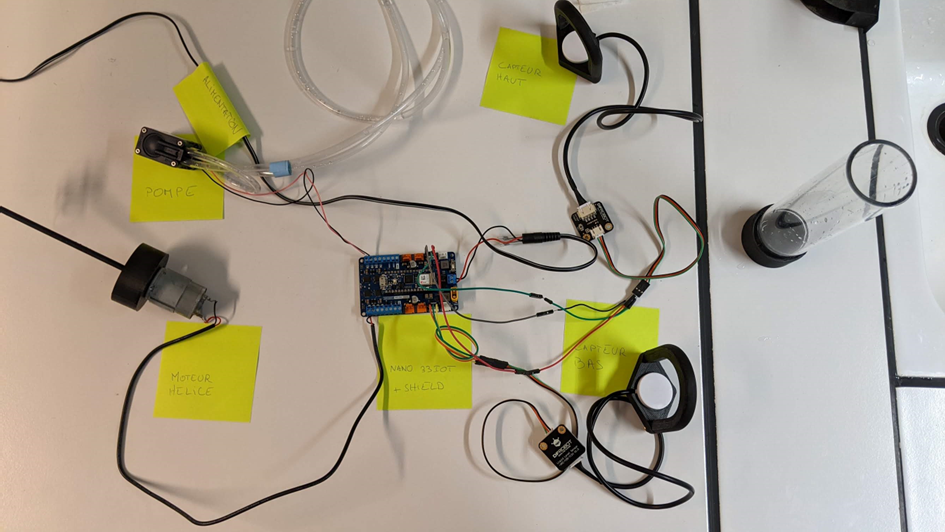
Photo du système total fonctionnel.
Léger problème d'étanchéité au bas du tube mais ça devrait se résoudre avec les tubes plus grands.
On a donc pu commencer à fouiller un peu pour créer l'application de contrôle à distance. On a établi les fonctionnalités nécessaires avec Fabrice :
- bouton démarrer le processus total
- bouton allumer et éteindre la pompe
- bouton allumer et éteindre le moteur agitateur
- bouton éteindre tout le système
il faut également refaire la soudure de la Arduino nano 33ioT
24/03/2023
Après une série de tests par Téa, résultats assez étranges, globalement la filtration est moins rapide avec agitation moteur. On a rentré les résultats sur excel pour les analyser plus nettement :
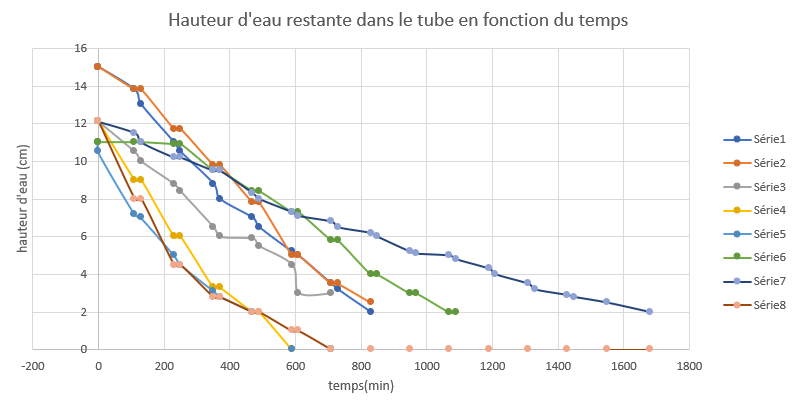
Les temps les plus longs sont atteints lorsque le tube est agité par un moteur. Cela nous pose vraiment problème car le projet serait à moitié inefficace. On établit les sources d'erreurs potentielles :
- la position dans la cuve pourrait influer car il y a 3 sources d'ultrasons pour 4 emplacements
- le sens de rotation de l'hélice du moteur
On lance donc l'impression d'un bouchon avec emplacement moteur supplémentaire pour pouvoir faire plusieurs essais en parallèle et plus facilement identifier le problème.
31/03/2023
Problème avec les impressions de la semaine passée, on n'avait pas pris en compte la dilatation lors de l'impression donc le moteur ne rentre pas dans l'emplacement prévu.
On recommence l'impression aux bonnes dimensions
Entre temps, Téa a refait des tests avec une membrane plus petite et une nouvelle cuve. Cette fois-ci l'agitation moteur permet bien un filtrage nettement plus rapide. Cela rend donc caduque le besoin d'un nouveau bouchon avec emplacement moteur. Voilà les graphiques obtenus avec les données de Téa :
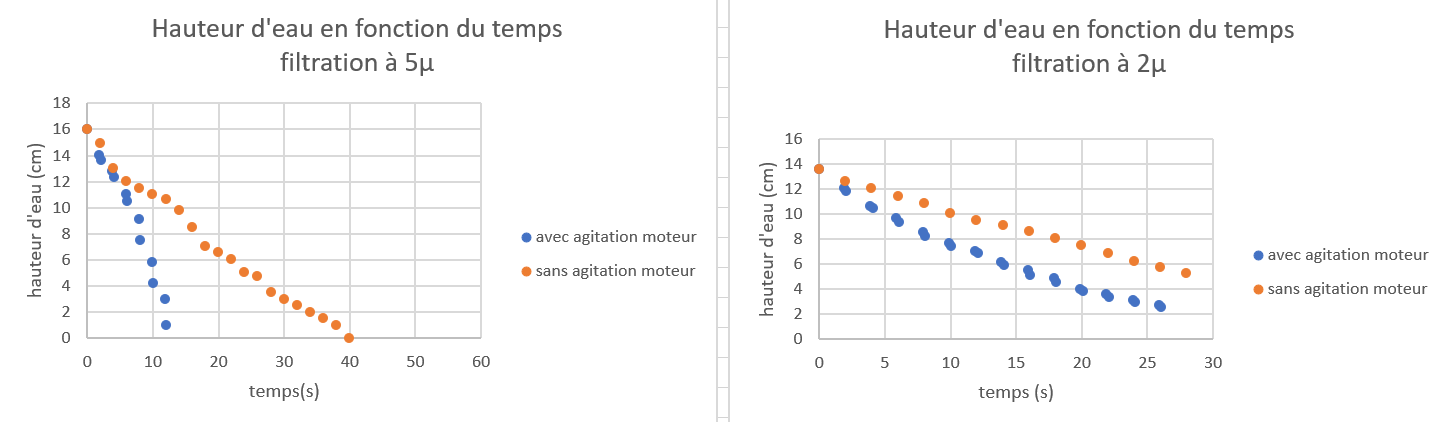
De plus, les lames au microscope sont beaucoup moins polluées de particules sans intérêt
14/04/2023
Nouvel objectif : rendre tout le système pilotable à distance grâce au Arduino ioT Cloud
On transfère le code déjà créé pour la carte Arduino et on l'adapte aux exigences du cloud. Beaucoup de problèmes de compilations, utilisation de Chat GPt4 pour les résoudre.