Contrôle de Réacteur de Synthèse de l'Acétate d'Éthyle
Projet MU5CI803 - Optimisation et contrôle des procédés.
NOM et Prénom : ALIOUT Hayem / BENAMOKRANE Faiza Soulef / BOUZIDI Manel / DJEBBAR Meriem / FERHI Abderrahmane
Introduction :
L'acétate d'éthyle est un liquide utilisé comme solvant pour les vernis à ongles et certaines colles, en raison de sa faible nocivité et de sa volatilité importante, il est aussi utilisé dans l'industrie agroalimentaire dans certains arômes fruités.
https://www.labolycee.org/synthese-de-lacetate-dethyle
La synthèse de l'acétate d'éthyle est une réaction d'estérification relativement simple mais hautement efficace. Elle implique la réaction entre l'éthanol (alcool) et l'acide éthanoïque (acide acétique), conduisant à la formation de l'acétate d'éthyle et d'eau comme sous-produit.
CH3CH2OH + CH3COOH ⇌ CH3COOCH2CH3 + H2O
Objectif du projet :
L'objectif de ce projet est de concevoir un réacteur permettant la synthèse d'acétate d'éthyle, tout en garantissant un contrôle précis de deux paramètres essentiels : la température de la réaction et le débit des réactifs.
Réactifs utilisés :
- Éthanol (alcool)
- Acide éthanoïque (acide acétique)
- Catalyseur : Généralement, aucun catalyseur n'est nécessaire pour cette réaction, car l'acide éthanoïque agit comme un catalyseur intrinsèque.
Matériel Utilisé :
- Capteur de température
- Détecteur de niveau (Ultrasonic Rnager) (nombre à revoir )
- 2 électrovannes.
- Un breadboard.
- Une carte Arduino Uno.
- 2 modules relais.
- Tapis chauffant- Peltier-
- X fils de connexion
- X mètre de tuyaux.
- Alimentation.
- Support
Appareils utilisés :
Imprimante 3D.
Outils manuels ( Pistolets à colle, pied à coulise..)
Etapes de construction :
Mode opératoire (inclus dans les étapes je pense)
Codes Arduino et montage:
Détecteur de niveau : (Ultrasonic Rnager)
ultrasons ranger est un module de mesure de distance sans contact qui fonctionne à 40 KHz. Lorsque nous fournissons un signal de déclenchement d'impulsion de plus de 10 µS via la broche de signal, le Grove_Ultrasonic_Ranger émettra 8 cycles de niveau de cycle de 40 kHz et détectera l'écho. La largeur d'impulsion du signal d'écho est proportionnelle à la distance mesurée. Voici la formule : Distance = temps élevé du signal d'écho * Vitesse du son (340M/S)/2. Le signal de déclenchement et d'écho de Grove_Ultrasonic_Ranger partage 1 broche SIG.
|
Seeeduino |
Grove-Ultrasonic Ranger |
|
5V |
Red |
|
GND |
Black |
|
Not Conencted |
White |
|
D7 |
Yellow |
Le code à copier dans l'arduino est le suivant :
#include "Ultrasonic.h"
Ultrasonic ultrasonic(7);
void setup()
{
Serial.begin(9600);
}
void loop()
{
long RangeInInches;
long RangeInCentimeters;
Serial.println("The distance to obstacles in front is: ");
RangeInInches = ultrasonic.MeasureInInches();
Serial.print(RangeInInches);//0~157 inches
Serial.println(" inch");
delay(250);
RangeInCentimeters = ultrasonic.MeasureInCentimeters(); // two measurements should keep an interval
Serial.print(RangeInCentimeters);//0~400cm
Serial.println(" cm");
delay(250);
}
Photo
Code électrovanne:
// Pin de contrôle du relais
const int relayPin = 6;
void setup() {
// Initialise la broche de contrôle du relais en mode sortie
pinMode(relayPin, OUTPUT);
Serial.begin(9600);
}
void loop() {
// Ouvre l'électrovanne pendant 5 secondes
openValve();
delay(5000);
// Referme l'électrovanne
closeValve();
// Ne fait rien d'autre dans la boucle
}
void openValve() {
// Active le relais pour alimenter l'électrovanne
digitalWrite(relayPin, HIGH);
Serial.println("Électrovanne ouverte");
}
void closeValve() {
// Désactive le relais pour couper l'alimentation de l'électrovanne
digitalWrite(relayPin, LOW);
Serial.println("Électrovanne fermée");
}
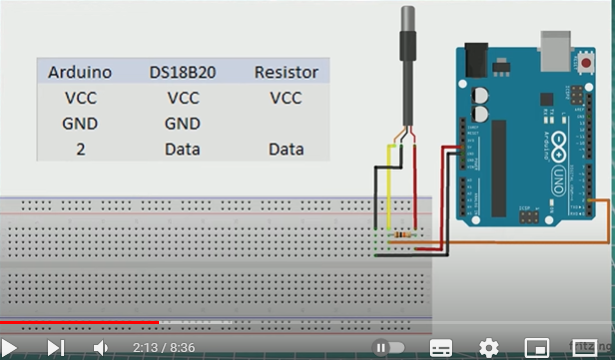
Code Capteur de température :
// Include the libraries we need
#include <OneWire.h>
#include <DallasTemperature.h>
// Data wire is plugged into port 2 on the Arduino
#define ONE_WIRE_BUS 2
// Setup a oneWire instance to communicate with any OneWire devices (not just Maxim/Dallas temperature ICs)
OneWire oneWire(ONE_WIRE_BUS);
// Pass our oneWire reference to Dallas Temperature.
DallasTemperature sensors(&oneWire);
// arrays to hold device address
DeviceAddress insideThermometer;
/*
* Setup function. Here we do the basics
*/
void setup(void)
{
// start serial port
Serial.begin(9600);
Serial.println("Dallas Temperature IC Control Library Demo");
// locate devices on the bus
Serial.print("Locating devices...");
sensors.begin();
Serial.print("Found ");
Serial.print(sensors.getDeviceCount(), DEC);
Serial.println(" devices.");
// report parasite power requirements
Serial.print("Parasite power is: ");
if (sensors.isParasitePowerMode()) Serial.println("ON");
else Serial.println("OFF");
// Assign address manually. The addresses below will beed to be changed
// to valid device addresses on your bus. Device address can be retrieved
// by using either oneWire.search(deviceAddress) or individually via
// sensors.getAddress(deviceAddress, index)
// Note that you will need to use your specific address here
//insideThermometer = { 0x28, 0x1D, 0x39, 0x31, 0x2, 0x0, 0x0, 0xF0 };
// Method 1:
// Search for devices on the bus and assign based on an index. Ideally,
// you would do this to initially discover addresses on the bus and then
// use those addresses and manually assign them (see above) once you know
// the devices on your bus (and assuming they don't change).
if (!sensors.getAddress(insideThermometer, 0)) Serial.println("Unable to find address for Device 0");
// method 2: search()
// search() looks for the next device. Returns 1 if a new address has been
// returned. A zero might mean that the bus is shorted, there are no devices,
// or you have already retrieved all of them. It might be a good idea to
// check the CRC to make sure you didn't get garbage. The order is
// deterministic. You will always get the same devices in the same order
//
// Must be called before search()
//oneWire.reset_search();
// assigns the first address found to insideThermometer
//if (!oneWire.search(insideThermometer)) Serial.println("Unable to find address for insideThermometer");
// show the addresses we found on the bus
Serial.print("Device 0 Address: ");
printAddress(insideThermometer);
Serial.println();
// set the resolution to 9 bit (Each Dallas/Maxim device is capable of several different resolutions)
sensors.setResolution(insideThermometer, 9);
Serial.print("Device 0 Resolution: ");
Serial.print(sensors.getResolution(insideThermometer), DEC);
Serial.println();
}
// function to print the temperature for a device
void printTemperature(DeviceAddress deviceAddress)
{
// method 1 - slower
//Serial.print("Temp C: ");
//Serial.print(sensors.getTempC(deviceAddress));
//Serial.print(" Temp F: ");
//Serial.print(sensors.getTempF(deviceAddress)); // Makes a second call to getTempC and then converts to Fahrenheit
// method 2 - faster
float tempC = sensors.getTempC(deviceAddress);
if(tempC == DEVICE_DISCONNECTED_C)
{
Serial.println("Error: Could not read temperature data");
return;
}
Serial.print("Temp C: ");
Serial.print(tempC);
Serial.print(" Temp F: ");
Serial.println(DallasTemperature::toFahrenheit(tempC)); // Converts tempC to Fahrenheit
}
/*
* Main function. It will request the tempC from the sensors and display on Serial.
*/
void loop(void)
{
// call sensors.requestTemperatures() to issue a global temperature
// request to all devices on the bus
Serial.print("Requesting temperatures...");
sensors.requestTemperatures(); // Send the command to get temperatures
Serial.println("DONE");
// It responds almost immediately. Let's print out the data
printTemperature(insideThermometer); // Use a simple function to print out the data
}
// function to print a device address
void printAddress(DeviceAddress deviceAddress)
{
for (uint8_t i = 0; i < 8; i++)
{
if (deviceAddress[i] < 16) Serial.print("0");
Serial.print(deviceAddress[i], HEX);
}
}
AVEC LED :
#include <OneWire.h>
#include <DallasTemperature.h>
// Broche de contrôle du relais
const int relayPin = 7;
// Broche du bouton
// Broches de contrôle des LEDs
const int yellowLedPin = 8; // Broche pour la LED jaune
const int redLedPin = 9; // Broche pour la LED rouge
// Broche pour le capteur de température
#define ONE_WIRE_BUS 2
// Initialisation d'une instance OneWire pour communiquer avec des dispositifs OneWire
OneWire oneWire(ONE_WIRE_BUS);
// Initialisation d'une instance DallasTemperature en utilisant la référence oneWire
DallasTemperature sensors(&oneWire);
// Tableau pour stocker l'adresse du thermomètre
DeviceAddress insideThermometer;
void setup() {
// Initialise les broches
pinMode(relayPin, OUTPUT);
pinMode(yellowLedPin, OUTPUT);
pinMode(redLedPin, OUTPUT);
// Initialise la communication série
Serial.begin(9600);
// Recherche des dispositifs sur le bus
sensors.begin();
sensors.getAddress(insideThermometer, 0);
// Configure la résolution du capteur de température
sensors.setResolution(insideThermometer, 9);
}
void loop() {
// Vérifie si le bouton est enfoncé
if (digitalRead(buttonPin) == LOW) {
// Si le bouton est enfoncé, active l'électrovanne et mesure la température
activateValve();
measureTemperature();
} else {
// Sinon, désactive l'électrovanne et éteint les LEDs
deactivateValve();
digitalWrite(yellowLedPin, LOW);
digitalWrite(redLedPin, LOW);
}
}
void activateValve() {
// Active le relais pour alimenter l'électrovanne
digitalWrite(relayPin, HIGH);
Serial.println("Électrovanne activée");
}
void deactivateValve() {
// Désactive le relais pour couper l'alimentation de l'électrovanne
digitalWrite(relayPin, LOW);
Serial.println("Électrovanne désactivée");
}
void measureTemperature() {
// Envoie une commande pour obtenir les températures depuis les capteurs
sensors.requestTemperatures();
// Obtient la température en degrés Celsius
float tempC = sensors.getTempC(insideThermometer);
// Allume la LED jaune si la température est inférieure à 60 degrés Celsius
if (tempC < 60) {
digitalWrite(yellowLedPin, HIGH);
digitalWrite(redLedPin, LOW);
}
// Allume la LED rouge si la température est supérieure à 90 degrés Celsius
else if (tempC > 90) {
digitalWrite(yellowLedPin, LOW);
digitalWrite(redLedPin, HIGH);
}
// Éteint toutes les LEDs si la température est entre 60 et 90 degrés Celsius
else {
digitalWrite(yellowLedPin, LOW);
digitalWrite(redLedPin, LOW);
}
// Affiche la température
Serial.print("Température en Celsius : ");
Serial.println(tempC);
// Attente pour éviter une lecture trop rapide
delay(1000);
}
Journal de bord
13 Novembre 2023 :
Choix du thème de projet et sa validation par Monsieur Pulpytel.
03 Décembre 2023 :
Début d'assemblage du support ainsi que la modélisation du réacteur et