Groupe B2
Nom des participants :
- Axelle Mano
- Vangu Nlandu Vangu
CléClémence Pereira- Ibtyssam Seddiki
Groupe : CMI Physique B
Journal de bord :
SéSéance 1 - 29/01/2024
Pour cette premièpremière séséance de l’l’UE LU1SXPFL, nous avons commencécommencé par une préprésentation de l’l’origine et du fonctionnement du Fablab mais aussi de l’l’objectif final de ce cours. Nous devrons donc documenter notre avancéavancée sur le projet final àà rendre et préprésenter en fin de semestre. Les valeurs fondamentales du Fablab sont le partage, l’l’ouverture et l’interdisciplinaritél’interdisciplinarité. Nous avons visionnévisionné un cours de la fabacademy enseignéenseigné par Neil Gershenfeld crécréateur du crécréateur du Fablab et du cours How to make (almost) anything. Nous avons éégalement rencontrérencontré l’él’équipe des Fabmanagers.
Ensuite, nous avons visitévisité le FabLab en commençcommençant par la salle des imprimantes 3D. Nous avons pu y observer diffédifférents objets qui ont étéété impriméimprimés avec ces imprimantes et tout le matématériel utiliséutilisé.

Salle d'impression 3D

Imprimante 3D
AprèAprès la salle d’d’impression 3D, nous avons visitévisité la salle de dédécoupe, dans laquelle nous avons pu dédécouvrir des machines qui utilisaient diffédifférentes méméthodes de dédécoupe préprécises : laser, jet d’d’eau, fil chaud, etc.


DéDécoupeuse àà jet d'eau
Puis nous nous sommes rendus dans la salle d’éd’électronique, oùoù se trouvent les appareils àà soudure et le matématériel de protection (gants, masques, casques).
Nous avons visitévisité la salle de prépréproduction dans laquelle nous avons dédécouvert la fraiseuse. Puis nous avons eu accèaccès àà la salle de menuiserie dans laquelle nous avons dédécouvert la fraiseuse àà bois.
 Salle d'
Salle d'TroisièTroisièmement et dernièdernièrement, nous avons forméformé nos groupes, Vincent Dupuis nous a présentéprésenté comment documenter notre Wiki et donc nous avons commencécommencé notre documentation sur la premièpremière séséance du projet FabLab.
SéSéance 2 - 05/02/2024
Lors de cette seconde séséance nous avons étéété initiéinitié au design 2D, 3D, àà l'impression 3D et àà la dédécoupe laser.
PremièPremièrement, nous avons dédécouvert Inkscape, un logiciel qui permet de dessiner les modèmodèles 2D que nous voulons obtenir àà la dédécoupeuse laser. Nous avons dédécouvert les fonctionnalitéfonctionnalités du logiciel, par exemple les diffédifférentes couleurs àà utiliser en fonction de si on veut graver ou dédécouper le matématériau, et puis nous les avons exploréexplorées et testétestées en dessinant un modèmodèle préprécis indiquéindiqué par monsieur Dupuis composécomposé d'un rectangle et de 4 cercles situésitués àà une distance préprécise des cotécotés du rectangle. Il a donc fallut calculer et rérégler les positions de chaque objet afin d'obtenir ce dessin :

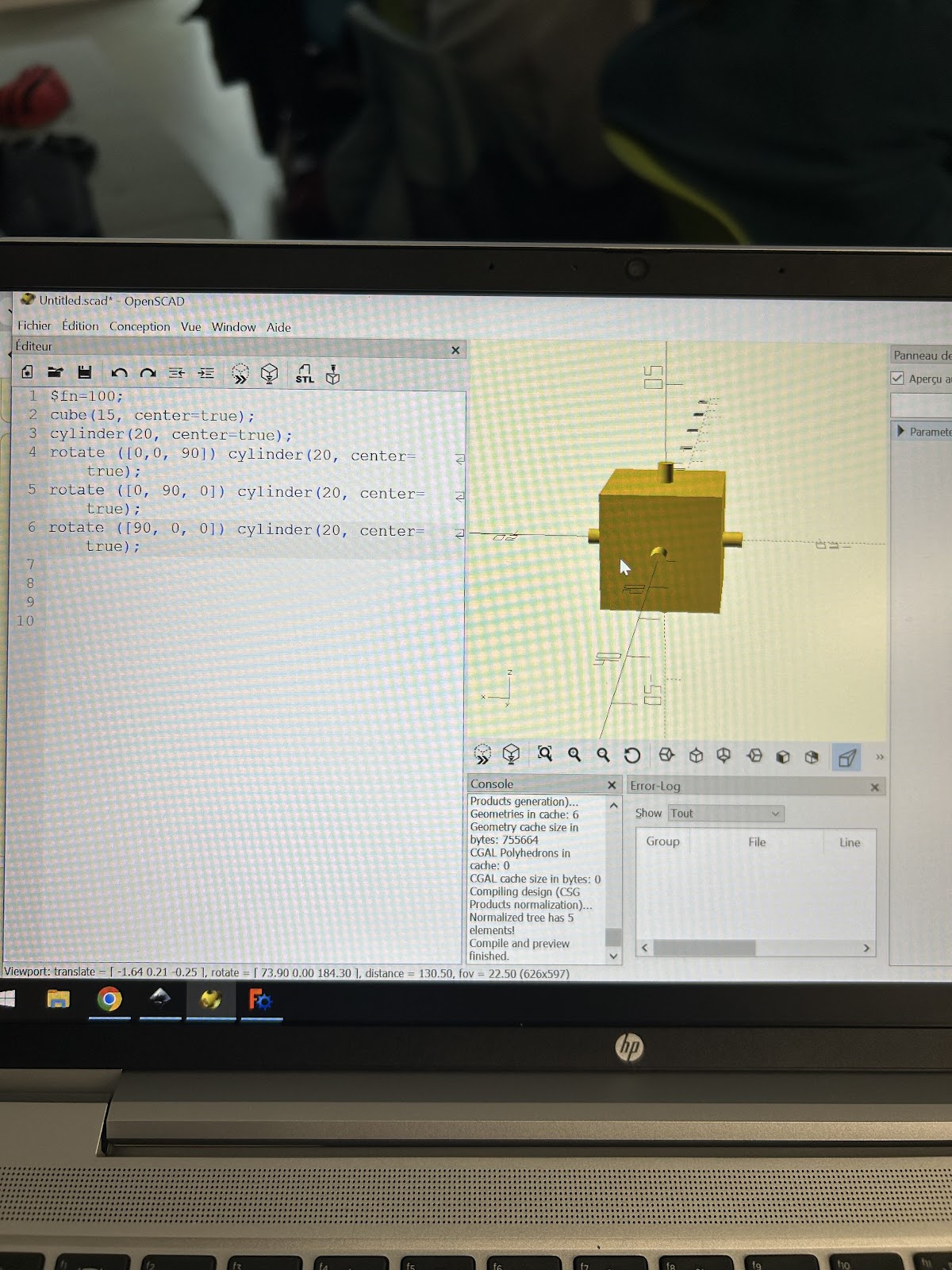
Ensuite, nous avons dédécouvert OpenSCAD, un logiciel de modémodélisation pour les imprimantes 3D. Nous avons aussi pris en main le logiciel en explorant un maximum de ses fonctionnalitéfonctionnalités, notamment le codage. En effet, il faut utiliser un langage de code spéspécifique pour expriméexprimé ce que nous souhaitons modémodéliser. Comme pour Inskape, notre professeur nous àà donnédonné un modèmodèle àà reproduire afin que l'on se familiarise avec le logiciel. Nous avons pu modélisémodélisé un cube avec des des trous sur chacune de ses faces. Aussi, nous avons dédécouvert la "CheatSheet" d'OpenScad, page web sur laquelle est regroupéregroupé toutes les lignes de code et le langage àà éécrire pour modémodéliser.

Puis, nous avons dédécouvert FreeCAD, un logiciel qui permet d'utiliser la modémodélisation volumique, la modémodélisation fonctionnelle, et la modémodélisation surfacique, trois types de modémodélisation entièentièrement paraméparamétrables. Nous avons éégalement pris en main le logiciel et explorer en modémodélisant un cube, puis en dessinant des cercles sur ses faces et en les extrudant, on obtenait des cylindres àà l'intéintérieur du cube. Il suffisait de soustraire les cylindres au cube pour avoir un cube trouétroué similaire àà celui réaliséréalisé sur OpenScad. Cependant, nous avons pu voir que ce logiciel n'éétais pas le meilleur pour la modémodélisation 3D car pas trètrès intuitif àà l'utilisation.

Enfin, en fin de séséance, une Fabmanager nous a monter en dédétails comment faire une impression 3D en nous montrant comment utiliser les imprimantes, et aussi comment faire de la gravure et de la dédécoupe laser. Nous avons ainsi étéété informéinformés de toutes les éétapes àà réréaliser avant de laisser une imprimante 3D ou une dédécoupeuse laser, comme rérégler les paramèparamètres de structure interne ou la préprésence de support pour une impression 3D et le réréglage de la focale pour la dédécoupeuse laser qui est automatique sur certaines machines. Nous nous avons éégalement étéété avertis des préprécautions àà prendre afin d'avoir une utilisation responsable des machines mises àà notre de disposition mais aussi pour notre sécuritésécurité.
SéSéance 3 - 12/02/2024
Cette troisiètroisième séséance a étéété une initiation au prototypage éélectronique avec l’l’aide d’d’arduino.
L'Arduino UNO est une plateforme éélectronique de prototypage rapide qui offre la possibilitépossibilité de connecter facilement des capteurs en tant qu'entréentrées et des actionneurs en tant que sorties. Elle intèintègre divers composants éélectroniques, dont son éléélément central, un microcontrômicrocontrôleur capable de stocker et d'exéexécuter des programmes informatiques.L’L’arduino permet des tests rapides de prototypes d’d’appareils éélectroniques.
La premièpremière éétape est de crécréer un programme dans un environnement de dédéveloppement (Integrated Development Environment), c'est-àà-dire une application sur laquelle on code. L’L’ide Arduino permet de crécréer du code puis de compiler ce code en un fichier comprécompréhensible par le microcontrômicrocontrôleur (langage binaire) en le télétéléversant. Le language utiliséutilisé est le C. Il existe trois parties essentielles àà un programme :
- commence par include
→→ permetd’d’inclure du code dans le code/réréutiliser du codedéjàdéjà existant, les fonctionsassociéassociées au capteur sontempaquetéempaquetées dans unebibliothèbibliothèque et pour parler avec le capteur il faut inclure du code externe - fonction setup
→→ permet d'initialiser le code et il seraexécutéexécuté 1 seule fois - fonction loop
→→exéexécute une action en boucle
Blink.ino sur arduino est ééquivalent au Hello world utiliséutilisé dans les autres langages informatiques tels que Python pour dédémontrer leur fonctionnement de manièmanière simple et rapide.
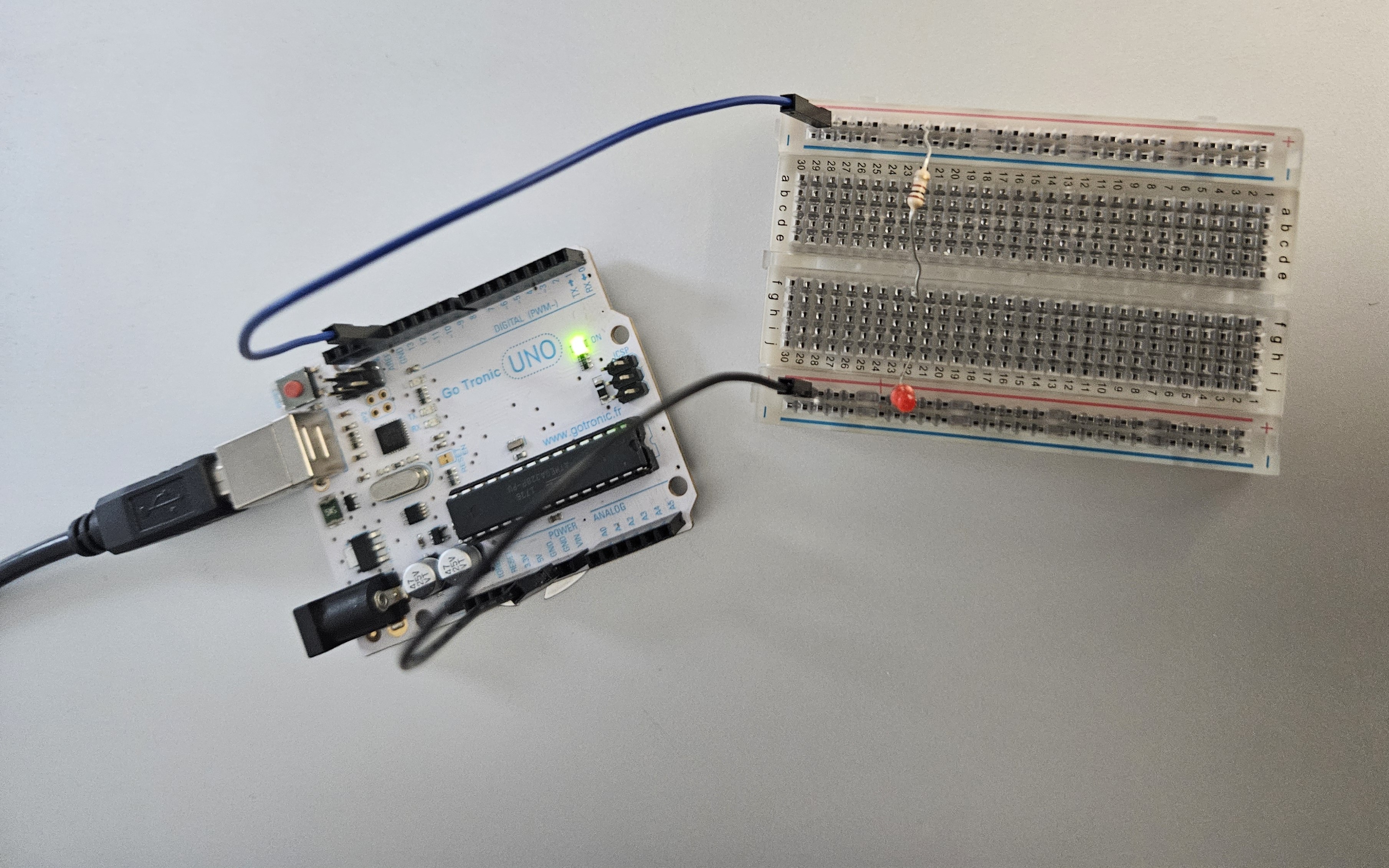
AprèAprès cette introduction théthéorique sur le fonctionnement d'Arduino, nous nous sommes mis en binôbinômes afin de faire une premièpremière prise en mains d'un capteur. Le premier exercice consistait àà brancher une LED rouge et une rérésistance en sésérie et de télétélécharger un programme disponible dans la base de donnédonnée de l'ide Arduino pour faire clignoter la LED (alluméallumée 1 seconde, ééteinte 1 seconde). En connectant la Breadboard, l'Arduino Uno et l'ordinateur nous avons téléversétéléversé le programme afin qu'il soit exécutéexécuté :

Le programme utiliséutilisé éétait un des exemples dans les programmes basiquesde l'IDE et s'appelait "Blink" :
void loop() {
SéSéance 4 - 26/02/2024
Lors de cette quatrièquatrième séséance, nous avons commencer notre projet de groupe.
L'objectif est concevoir un systèsystème usant d’d’au moins un dédétecteur/ capteur, d'effectuer une expéexpérience physique avec et de réréaliser une sésérie de mesures.
Nous avons dédécider de concevoir un dédétecteur d’intensitéd’intensité sonore. Le principe est de mesurer l’intensitél’intensité et le volume sonore selon l’l’endroit et les matématériaux préprésents dans ces endroits, mesurer l’attél’atténuation de chaque matématériau (verre, bois, plexiglas) et véérifier la loi physique sur le niveau d'intensitéintensité sonore : L = 10log(I/Io).
Pour nos premiers tests, nous avons eu besoin d'un capteur de son et d'une carte Arduino Uno.
Tout d'abord, nous avons tester le dédétecteur de son, soit le Grove - Sound Sensor:
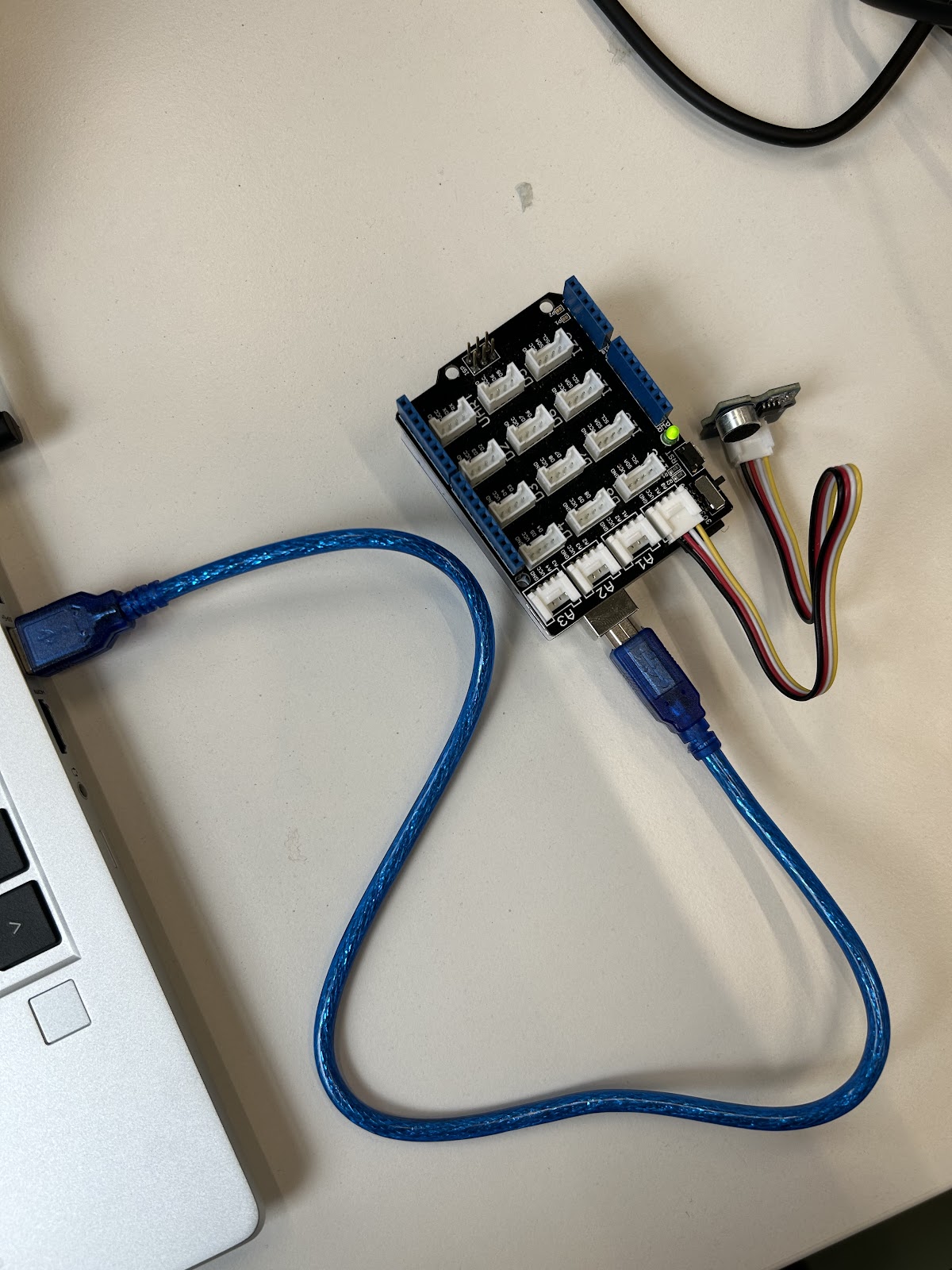
Ainsi, nous avons dûdû calibrer le dédétecteur pour pouvoir tester ses fonctionnalitéfonctionnalités.
Nous avons utiliséutilisé un code qui permettait de prendre des mesures du niveau sonore, nous avons pris ce code sur :
https://sensorkit.arduino.cc/sensorkit/module/lessons/lesson/06-the-sound-sensor
Observation d’d’un graphe de valeurs (unitéunités des axes encore pas trètrès claires pour nous : peut-êêtre des Volts)
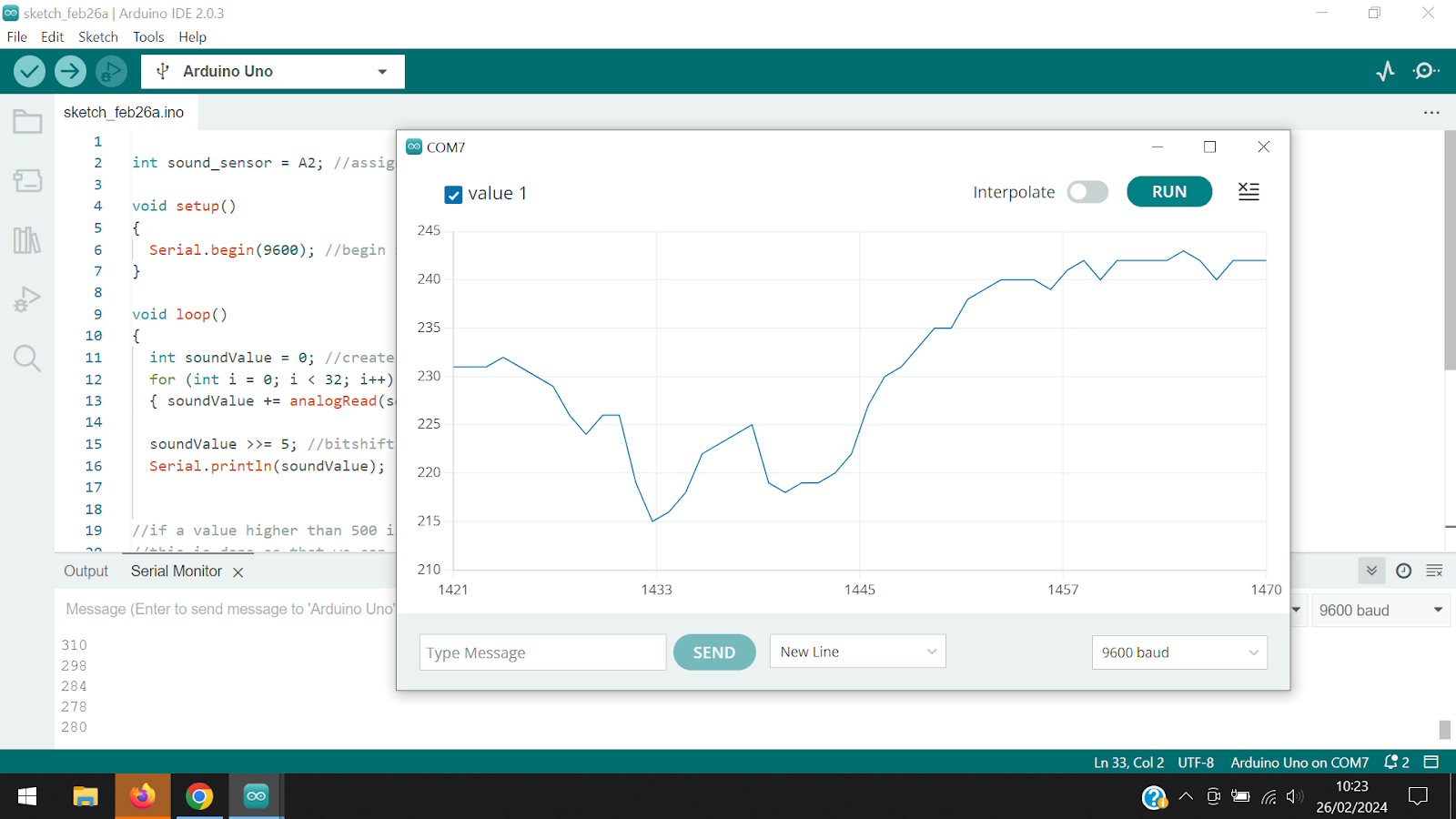
Cela nous confirme que notre capteur focntionne !
La prochaine éétape est de réfléréfléchir àà comment modifier le code pour avoir des rérésultats en dB.
Objectifs pour les prochaines séséances :
Il faut prendre un certains nombre de mesures (ééchantillonnage) àà intervalle rérégulier (idéidée du forum : arduino decibel meter)
OU
Faire un ééchantillonnage nous-mêmême : on prend une mesure en envoyant une certaine valeur en dB ensuite on observe le signal en Volts que l’l’on reçreçoit, on trace une courbe sur Regressi pour avoir la fonction correspondante et donc pouvoir par la suite passer de Volt àà dB. C'est une bonne piste pour la prise de mesure.
Puis pour tester l’attél’atténuation on prendra diffédifférents matématériaux et on voit si l’attél’atténuation est linélinéaire/continue/autre et fonction des dB de la source. Il est nénécessaire de connaîconnaître les caractécaractéristiques des matématériaux que l’l’on utilise.
Pour la source sonore, on prendra un bruit blanc (par exemple) qu’qu’on trouve sur Youtube dont on connaîconnaît le niveau sonore, on mesurera son volume sonore avec Phyphox (sur un autre télétéléphone) et on le laissera le son en continu lors de notre expéexpérience afin d’d’avoir un rérésultat cohécohérent. Pour utiliser Phyphox on procèprocèdera àà un éétalonnage grâgrâce àà un sonomèsonomètre et une source afin de connaîconnaître la valeur préprécise du son pour avoir une valeur de référéférence.
On relèrelèvera ensuite les sons selon les matématériaux en comparant avec le son initial et on calculera l’attél’atténuation sonore.
On répèrépète la mêmême expéexpérience pour tous les matématériaux.
Pour vévérifier nos rérésultats, on regardera sur internet les attéatténuations des diffédifférents matématériaux afin d’d’avoir un ordre de grandeur pour nos mesures. Aussi, il faut qu’qu’on choisisse des matématériaux avec des valeurs d’attéd’atténuation assez diffédifférentes.
Enfin, il faut comparer nos mesures aux mesures connues et discuter de la fiabilitéfiabilité et de la préprécision de notre dispositif.
IdéIdées de matématériaux :
Verre
BOIS
PVC
LIEGE
Séance 5 -04/03/2024
Projets personnels
Axelle
Vangu
CléClémence
Ibtyssam
Séance 5 - 04/03/2024
Objectifs du jour :
-
étalonner nos téléphones (Phyphox)
-
prendre une première série de mesure
-
faire une courbe sur Regressi : corrélation Volts et dB
Première étape : Étalonnage
Nous avons étalonné Phyphox sur nos téléphones à l’aide d’un “bruit rose”. Nous avons ainsi mesuré 70 dB.
Expérience : Nous nous sommes installés dans la salle de réunion du FabLab car assez insonorisée et silencieuse. La source de son (téléphone de Clémence) était placée à 1m de nos téléphones, pour préserver l’étalonnage, nous avons enregistré le décalage (113 dB pour le téléphone utilisé lors des prises de mesures par la suite).
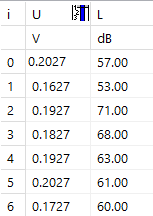
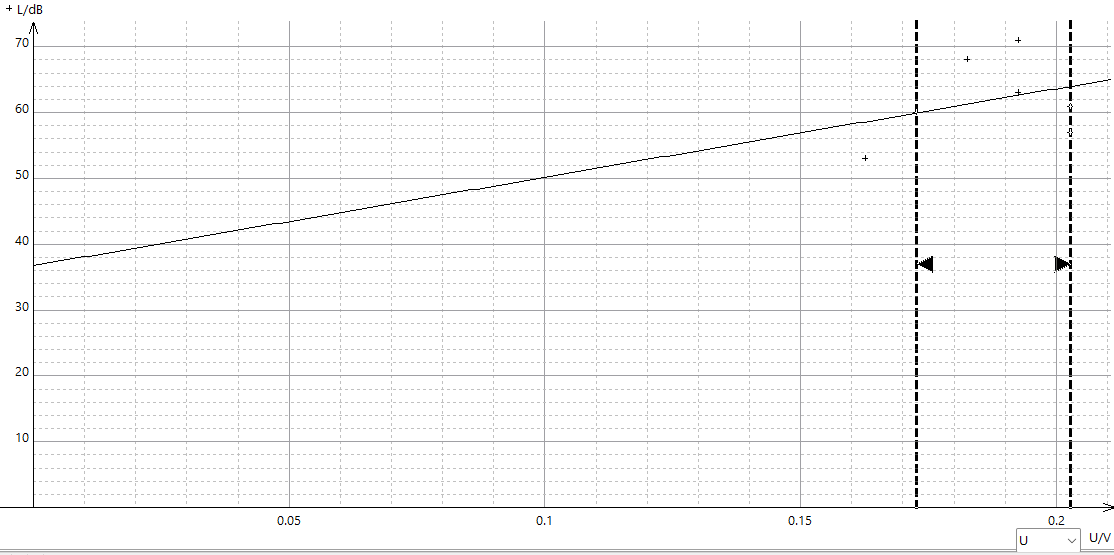
Deuxième étape : Prise de mesure
Une fois Phyphox étalonné, nous avons pris une série de valeurs à l’aide du capteur “Grove - Sound Sensor”, cependant, les valeurs obtenues n’étaient malheureusement pas du tout cohérentes. En effet, en parallèle de la prise de mesure, nous avons ouvert Regressi afin de pouvoir tracer la courbe et donc pouvoir faire une corrélation entre Volts et dB. On s'attendait à ce que la corrélation soit à peu près linéaire, ou du moins cohérente, cependant ça n’a pas fonctionné.
Résultats :
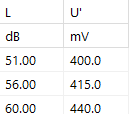
Etape 3 : changement de capteur
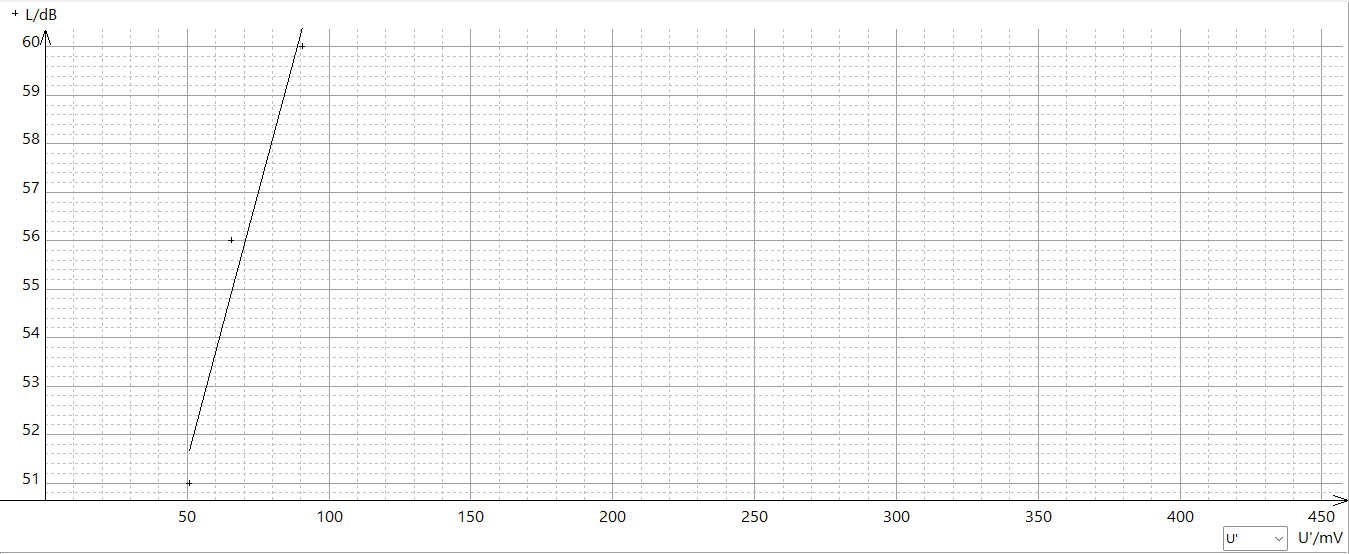
Nous avons ensuite changé de capteur en prenant le loudness sensor. Par manque de temps nous n’avons fait que très peu de mesures.
Programme utilisé pour le capteur “Grove - Loudness Sensor” :
int val;
void setup()
{
Serial.begin(9600);
}
void loop()
{
analogRead(0);
delay(10);
val = analogRead(0);
Serial.println(val);
delay(200);
}
Source : https://seeeddoc.github.io/Grove-Loudness_Sensor/
Mais les premières valeurs obtenues restaient quand même plus cohérentes, nous obtenons une droite linéaire.
Objectifs pour la prochaine séance :
Pour la prochaine séance nous comptons donc faire le plus de mesures possibles avec ce capteur. L’objectif est aussi de faire varier la résistance qui est lié à la sensibilité du capteur. Ainsi on prendra les valeurs les plus cohérentes.
Il nous reste un dernier capteur à tester le grove Analog Microphone qui se rapproche plus du microphone présent sur nos téléphones. En testant ce dernier capteur nous pourrons ainsi choisir avec lequel parmi les 3 nous obtenons les valeurs les plus cohérentes, pour avoir la meilleure fonction reliant Volts et dB.
Grove- Analog Microphone :
