Groupe B4
Nom et PréPrénom: Emile WHEWELL Paul BELLENGER Lucien FIQUET Gabriel WERNAIN
Cursus: CMI-PHY-B
SéSéance 1
Pour notre PremièPremière séséance du Projet FabLab consistait àà nous faire dédécouvrir les lieux, nous avons notamment visitévisité les diffédifférentes salles. Il y avait la salle àà imprimantes 3D, la salle àà Menuiseries, la salle éélectronique et la salle àà dédécoupe. Notre professeur Vincent Dupuis nous a aussi expliquéexpliqué l’l’origine du FabLab mais aussi le dédéroulement des séséances lors de ce semestre.
 Salle
Salle àà imprimantes 3D
 Hall Principale
Hall Principale

CôtéCôté dédétente
SéSéance 2
Durant cette séséance, on a appris àà utiliser de nouveaux moyens de conceptions grâgrâce àà des logiciels de modémodélisation (Inkscape, OpenScad, Freecad,...) pour s'en servir afin de concevoir des objets avec l'aide d'imprimante 3D.
En effet, de la modémodélisation logicielle au fonctionnement de l'imprimante et de ses paramèparamètres, Vincent Dupuis nous a tout passépassé en revue.

(Impression 3D d'un projet)
SéSéance 3
Lors de cette séséance, nous avons eu un premier contact avec des technologies "emportéemportées", àà savoir des cartes Arduino. Nous avons dûdû apprendre àà effectuer des programmes basiques sur celles-ci, comme les faire clignoter.
Dans ce cours nous avons vu dans un premier temps, comment marchait les cartes Arduino. AprèAprès nous avons vu le plus intéintéressant comment les programméprogrammées. Ce qui est fascinant car cela peut nous permettre de le faire cher nous et de nous faire nos propre projet tout seul, facilement. Moyennent tout de mêmême en acheter une. De plus, comme pour les autres logiciels, celui pour programméprogrammé les Arduino est open source, donc pas besoin d’d’acheter le logiciel.
Pour finir, on a vu comment utiliséutilisé les impriment 3d dans le cadre du fablab a Sorbonne universitéuniversité. Et certain on profitéprofité de cela pour lancer leur propre impression de lors projet personnel. Objet qu’qu’il avait réaliséréalisé, sur les logiciels qu’qu’on avait vu au dernier cours. On a notamment eu le droit a l'impression d'une réréplique d'une rame de RER
SéSéance 4
Durant cette séséance, nous avons commencécommencé àà chercher pour notre projet. Nous avons optéopté pour un dédétecteur de force qui relârelâche quelque chose àà partir d'une valeur seuil. Soit en d'autre mot une mine ! En effet, notre dédétecteur de force dédétecterai le poids qui est on le rappel une force (P=mg avec g=10 m/s^-2). On aurait donc un balance qui a partir d'un poids critique lâlâcherai des confettis, de l'eau ou bien de l'huile.
Nous avons fait un prototype, dont voici une photo

Pour ce system nous avons utiliséutilisé un capteur Grove - Round Force Sensor (FSR402), qui fonctionne grâgrâce a deux plaque conductrice sésépare par un espace d'une éépaisseur h, et tout l'astuce tient en le faite que lorsque qu'on applique un force F sur ce capteur l'éépaisseur h diminue, diminuant ainsi la rérésistance entre les deux plaque conductrice, c'est cela que le capteur capte et c'est aussi cela que renvoi le capteur.
Ceci entraine que les valeurs de sortie ne sont pas des newtons ou de kg, mais cela n'est pas grave car la valeur de sortie dédépend quand mêmême des newton. On a donc simplement a nous mêmême calibre ce capteur.
Pour avoir le code qui fait fonctionne le Round Force Sensor, nous avons chercher sur internet. Nous l'avons trouve sur le site simple duino
/* How to use a Force sensitive resistor to fade an LED with Arduino
More info: http://www.ardumotive.com/how-to-use-a-force-sensitive-resistor-en.html
Dev: Michalis Vasilakis // Date: 22/9/2015 // www.ardumotive.com */
//Constants:
const int ledPin = 3; //pin 3 has PWM funtion
const int sensorPin = A0; //pin A0 to read analog input
//Variables:
int value; //save analog value
void setup(){
pinMode(ledPin, OUTPUT); //Set pin 3 as 'output'
Serial.begin(9600); //Begin serial communication
}
void loop(){
value = analogRead(sensorPin); //Read and save analog value from potentiometer
Serial.println(value); //Print value
value = map(value, 0, 1023, 0, 255); //Map value 0-1023 to 0-255 (PWM)
analogWrite(ledPin,255-value); //Send PWM value to led
delay(100); //Small delay
SéSéance 5
Durant cette séséance, nous avons en quelque sorte finaliséfinalisé (le) notre prototype (de plaque pour permettre de poser des objets et les mesurer) de notre balance. (Nous avons aussi commencécommencé àà conceptionner notre boite via l'imprimante 3D.)
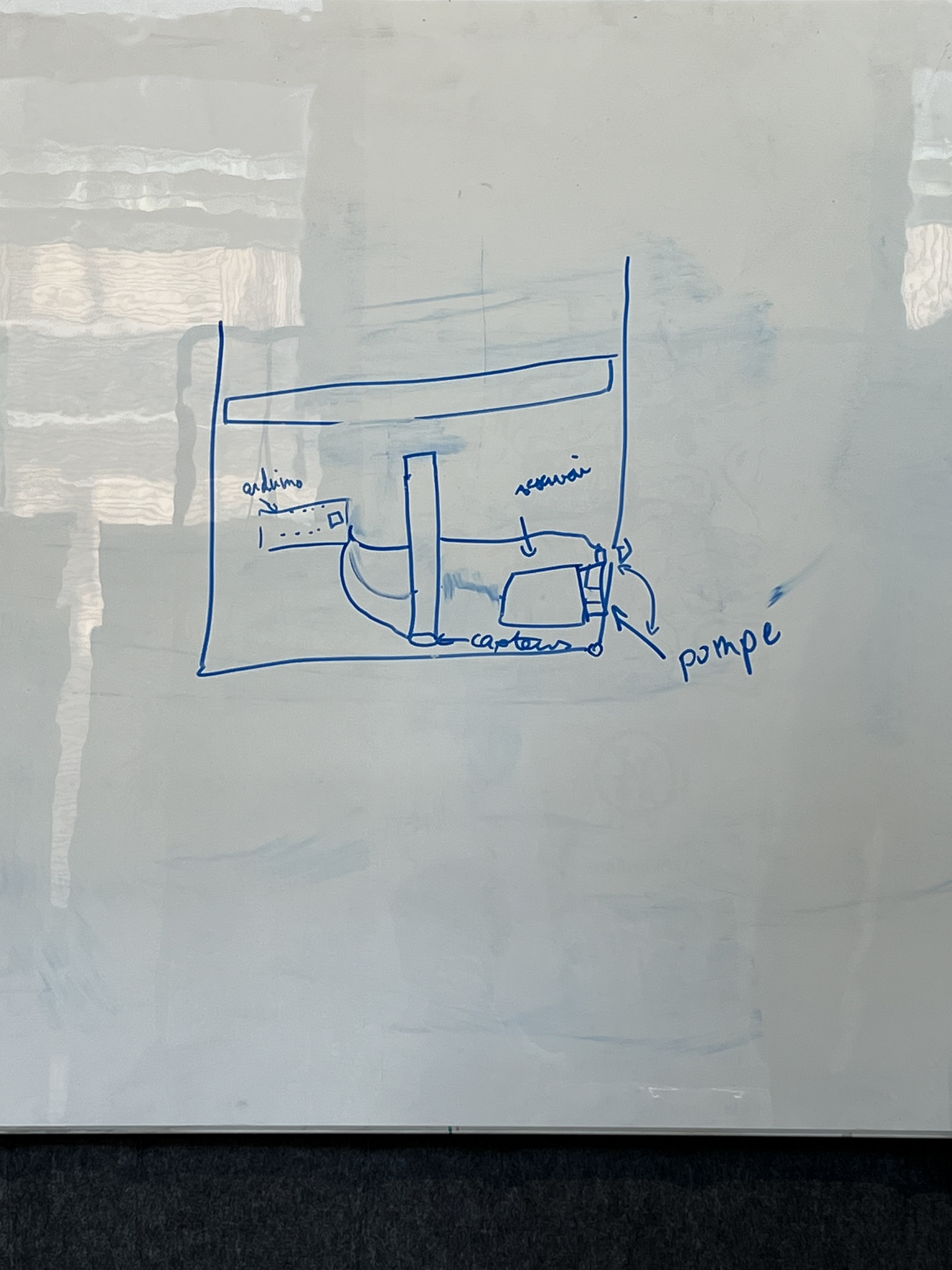
On peut voir ci-dessous un schéschéma de la version finale. On remarquera que le capteur ce trouve en bas du cylindre. Ceci permet d'aprèaprès nos expéexpériences d'avoir une mesure plus préprécise. En effet, le pilier ayant un diamèdiamètre exactement éégale au diamèdiamètre du capteur, il permet de mettre tout le poids de l'objet sur le capteur et donc de réréellement captécapté tout le poids de l'objet.
Vu qu'on rappel que notre objet n'est pas une simple balance mais un mine ! Nous avons voulu rajouter a notre projet un moteur pour pouvoir ééjecter a l'aide d'une héhélice des confettis. Pour cela nous sommes aller dans un premier temps chercher des moteurs dans le fablab pour voir si il possépossédait des moteurs susceptible de nous intéresséintéressé.
Dans un premier temps nous avons trouvétrouvé ce moteur :
Malheureusement, le moteur s'avèavère êêtre trop faible pour pouvoir propulser quoique ce soit mêmême en le calibrant au maximum de sa puissance.
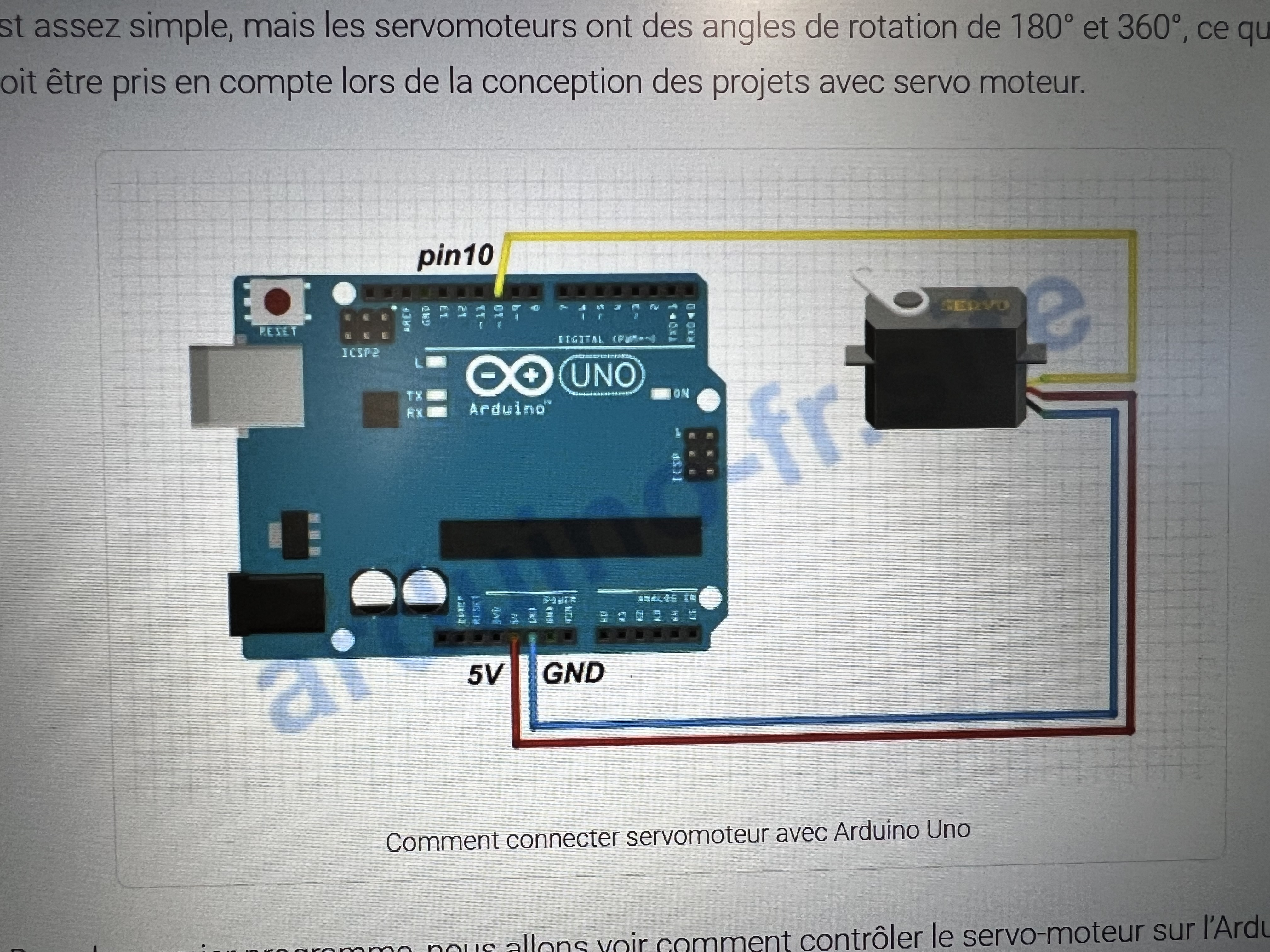
En cherchant sur internet, nous avons trouver le code relier au servomotor.
#include "Servo.h"
Servo servo; // crécréation de l'objet "servo"
void setup() {
servo.attach(10); // attache le servo au pin spécifiéspécifié
}
void loop() {
servo.write(1000); // demande au servo de se dédéplacer àà cette position
delay(100);
}SéSéance 6
Dans cette séséance nous avons voulu dédécouper dans un premier temps la boite. Cependant, nous avons rencontre plein de problèproblème pour dédécouper cette boite. En effet, pour la faire a la bonne taille on devait la dédécouper en plusieurs fois. Sauf que problèproblème quand on dédécoupait en plusieurs fois c'est que la dédécoupeuse ne faisait pas exactement la mêmême taille ce qui nous empêempêchais d'assemble correctement la boite.
Pour faire le model de la boite, nous avons utilise ce logiciel en ligne : Make A Box: Generate Laser Cutter Templates for Enclosures! En effet, ce logiciel nous a étéété conseiller par le prof car il permet d'avoir rapidement un model de boite de n'importe quel taille.
SéSéance 7
Lors de cette séséance, nous avons réréussi des les premièpremières minutes (et oui en seulement 10 minute !!) a faire cette boite dont nous avons eu tellement de mal a faire.
dont voici une photo :

Cependant le soucis avec cette boite c'est la taille. En effet, les est trop petit, pour un raison assez simple c'est que une boite de la taille qu'on avait préprévu de dédécoupe au dédépart est trop grande pour la dédécoupeuse laser du fablab on a donc du crécrée une boite plus petite. On a donc du pour reméremédier a ce problèproblème réimpriméréimprimé notre pilier, pour un pilier plus petit (6,3 cm de haut contre X) et nous allons dédécouper aussi une autre boite plus petit, pour y mettre les confettis et le moteur a propulsion des confettis.
De plus, lors de cette séséance nous avons voulu calibre notre capteur de force. Pour cela nous avons pris une balance et deux bouteille d'eau ainsi que le systèsystème pilier plus capteur.
Cependant on c'est rendu compte d'un phénomèphénomène plutôplutôt intéintéressant. Le capteur envoi un signale de plus en plus élevéélevé si on laisse l'objet longtemps dessus. Soit la valeur renvoyérenvoyé par le capteur dédépend du temps. On a quand mêmême fait quelque mesure, mais on a pas eu le temps de finir a cause de la durédurée des séséances. Nous avons reproduit chaque mesure 3 fois pour une plus grande préprécisions et pour pouvoir mesure facilement une incertitude. Pour les valeurs de sortie nous avons pris la moyenne des valeurs.



Pour faires ces mesures nous n'avons pas utiliséutilisé notre crécréation car celle si n'éétais pas encore fini. Nous avons don utilise un systèsystème. Nous avons pris une bouteille d'eau car avec l'eau c'est simple de faire varie le poids ! Nous avons bien éévidemment utilise un balance car pour pesépesé un objet ca reste le top. Ci-dessus une photo de notre systèsystème:

SéSéance 8
Pour cette séséance nous voulions commencer par refaire le pilier. En effet, celui que nous avions fait la séséance précéprécédant a eu un dédéfaut de fabrication. Ce qui a fait qu'il a cassécassé. Pour ne pas perdre de temps a réréimprime en trois D un nouveau pilier, nous avons pris la dédécision de dédécouper le pilier trop grand que nous avions pour qu'il soit a la bonne taille. Pour cela, nous avons utilise une simple scie a bois classique.
par la suite nous avons continue a chercher comment augmenter la puissance de notre Arduino pour correctement alimenter notre moteur. Pour cela nous avons dédécide de souder plusieurs pile entre elle. En effet, nous avions essaye avec 4 piles mais mêmême la ce n'éétais pas assez puissant ! On sait donc dit que vu la loi des nœnœuds si nous mettions plusieurs pile en séséries alors la nous aurions assez de puissant vu que les puissances des piles allais s'additionnéadditionnés. On les a donc souder ensemble a l'aide d'un fer a souder. Pour cela on a utilise un fil en mental spéspécialement fait pour la soudure. En effet, une membre d'un autre groupe nous a dit que la tempétempérature de fusion des câcâbles éélectriques éétait plutôplutôt élevéélevé contenue de l'effet joules, il éétait donc plus simple d'utiliser un autre câcâble pour souder.
Sceance 9
- on a fait un troue a la perceuse
- on a avait un probleme avec le moteur et le capteur
- on a essaye 12c Motor driver TB6612FNG
- on a essaye que arduino
- relai
Projet personnel Paul Bellenger
Projet personnel Lucien Fiquet
Pour mon projet d'impression 3D, j'ai décidédécidé de faire un objet assez commun mais pas trop facile non plus. Un avion m'a paru une bonne idéidée sur un coup de têtête et j'ai commencécommencé àà éécrire le programme sur OpenSCAD.
En commençcommençant, je suis parti du plus facile vers le plus dur pour faire quelques ajustements àà la fin.
$fn=50;
module base (){
rotate([0,90,0])cylinder(10,1,1);
translate([10,0,0])rotate([0,90,0])cylinder(3.5,1,0.6);
translate([13.5,0,0])rotate([0,90,0])cylinder(0.2,0.6,0.5);
translate([13.7,0,0])rotate([0,90,0])cylinder(0.1,0.5,0.1);
translate([-0.8,0,0])rotate([0,90,0])cylinder(0.8,0.7,1);
translate([5,1.7,0])rotate([0,90,0])cylinder(2,0.5,0.4);
translate([5,3.1,0])rotate([0,90,0])cylinder(2,0.5,0.36);
translate([5,-1.7,0])rotate([0,90,0])cylinder(2,0.5,0.4);
translate([5,-3.1,0])rotate([0,90,0])cylinder(2,0.5,0.36);
};
translate([0,0,0.5])polyhedron(
points=[[0.3,0,3], [0,0.5,0.3], [0,-0.5,0.3], [4,0,0.5]],
faces=[[0,2,1],[1,2,3],[3,0,1],[2,0,3]]
);
module wings (){
translate ([5.5,0,0.3])polyhedron(
points=[[-1,7,0], [-2,0.5,0.5], [-2,0.5,-0.3], [5,0,0]],
faces=[[0,1,2],[1,3,2],[3,1,0],[3,0,2]]
);
translate ([5.5,0,0.3])polyhedron(
points=[[-1,-7,0], [-2,-0.5,0.5], [-2,-0.5,-0.3], [5,0,0]],
faces=[[1,0,2],[1,2,3],[0,1,3],[0,3,2]]
);
};
module swings(){
translate ([0,0,0])polyhedron(
points=[[0,-2.5,0], [0,0.5,0.5], [0,0.5,-0.3], [4,0,0]],
faces=[[1,0,2],[1,2,3],[3,0,1],[3,2,0]]
);
translate ([0,0,0])polyhedron(
points=[[0,2.5,0], [0,0.5,0.5], [0,0.5,-0.3], [4,0,0]],
faces=[[0,1,2],[1,3,2],[1,0,3],[3,0,2]]
);
};
//translate ([30,0,0])polyhedron(
//points=[[1,0,4], [0,0.5,0.3], [0,-0.5,0.3], [4,0,1]],
// faces=[[0,1,2],[1,2,3],[3,0,1],[3,0,2]]
// );
//translate([30,0,0])cube([4,4,25],center=true);
//translate([30,7,0])cube([4,4,25],center=true);
base();
wings();
swings();J'ai donc d'abord commencécommencé par le module que j'ai appeléappelé "base", pour simuler le corps de l'avion avec une succession de cylindre pour y donner forme, auxquels j'ai plus tard rajoutérajouté des moteurs se situant sous les ailes.
Ensuite est venue la partie compliquécompliquée, j'ai utiliséutilisé la fonction "polyhedron" pour les ailes ce qui s'est révélérévélé êêtre une torture. Pour l'utiliser il faut dédéfinir une combinaison de points formants les sommets de la figure, puis dédéfinir les faces en fonction des sommets auxquelles elles sont jointes. Mais aprèaprès cela, il faut éégalement vévérifier que les sommets sont dédéfinis dans le sens horaire de la face, sans quoi on peut avoir un aperçaperçu mais pas de rendu car c'est comme si la face éétait àà l'envers.
Et je m'estime heureux car je n'ai fait que des formes àà quatre sommets et quatre faces, simplifiant ainsi la chose pour les ailes. Celles-ci sont divisédivisées en trois groupes : les deux principales dédéfinies dans le module "wings", les deux horizontales arrièarrières dédéfinies dans le module "swings" pour "small wings" car j'ai oubliéoublié l'existence du mot aileron et la dernièdernière dédéfinie hors module car je n'avais plus de nom.
Ce qui nous donne ce rérésultat :
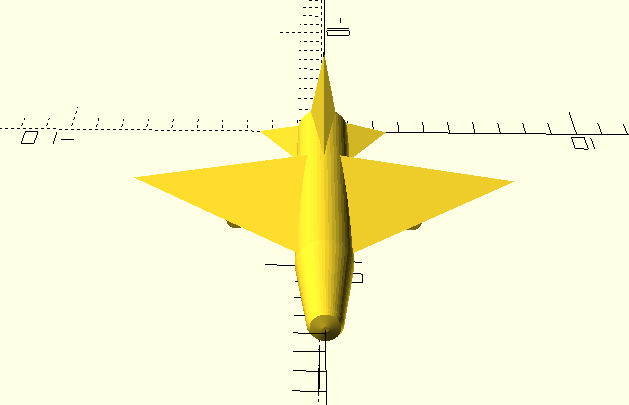
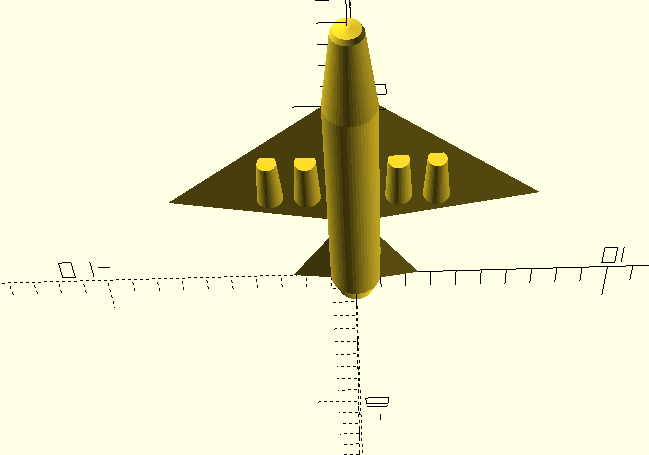
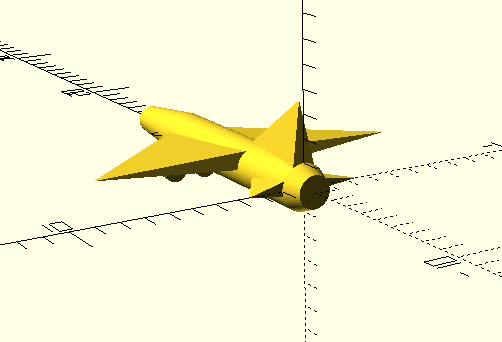
Cela ne paye pas de mine et nénécessitera un peu de support au niveau des ailes, mais je suis plutôplutôt satisfait du rérésultat.
VoilàVoilà maintenant àà quoi cela ressemble en vrai :



Le fil a eu un léléger problèproblème au niveau du dessous des ailes mais cela reste globalement une réréussite.
Pour mon projet de dédécoupe 2D, je suis parti d'une image d'une œœuvre que j'aime beaucoup et je l'ai retouchéretouchée sur le logiciel Inkscape. J'ai modifiémodifié le grain pour obtenir un contraste moins flagrant sur la gravure, modifiémodifié légèlégèrement l'ombrage, et rajoutérajouté un cadre de dédécoupe pour avoir une pièpièce centrécentrée.
VoilàVoilà le rérésultat :

Je suis entièentièrement satisfait du rérésultat. Il y a un petit dédéfaut du bois mais çça n'a pas non plus déformédéformé l'image.
Projet personnel Gabriel Wernain
Projet personnel Emile Whewell