Projet - Conception et réalisation d'une machine de marche bipède
Informations
- DROZD Aleksandra, DROZD Michal
- Aleksandra.Drozd@etu.sorbonne-universite.fr Michal.Drozd@etu.sorbonne-universite.fr
- L2 mono mécanique intensive
- 17/11/2023 - 08/01/2023
Contexte
Dans le cadre de l'UE LU2ME113, nous avons un projet à réaliser qui consiste à concevoir, modéliser et simuler un robot marcheur. Nous avons choisi un robot bipède basé sur le mécanisme de Hoekens :

Modélisation du robot sur le logiciel Solidworks :

Objectifs
Après la conception et la simulation du robot sur Solidworks, nous avons eu la possibilité de créer un prototype de ce robot. Le châssis a été réalisé avec des composants MakerBeam. Les pièces restantes, comme les pattes et le mécanisme, ont été imprimées au FabLab sur imprimante 3D.
(photo du prototype à venir)
Matériel
- PLA noir 1,75 mm
Machines utilisées
- Imprimante Raise 3D Pro 2 et Pro 2 plus
- Fer à souder
Construction
Étape 1
Impression des pièces
Étape 2
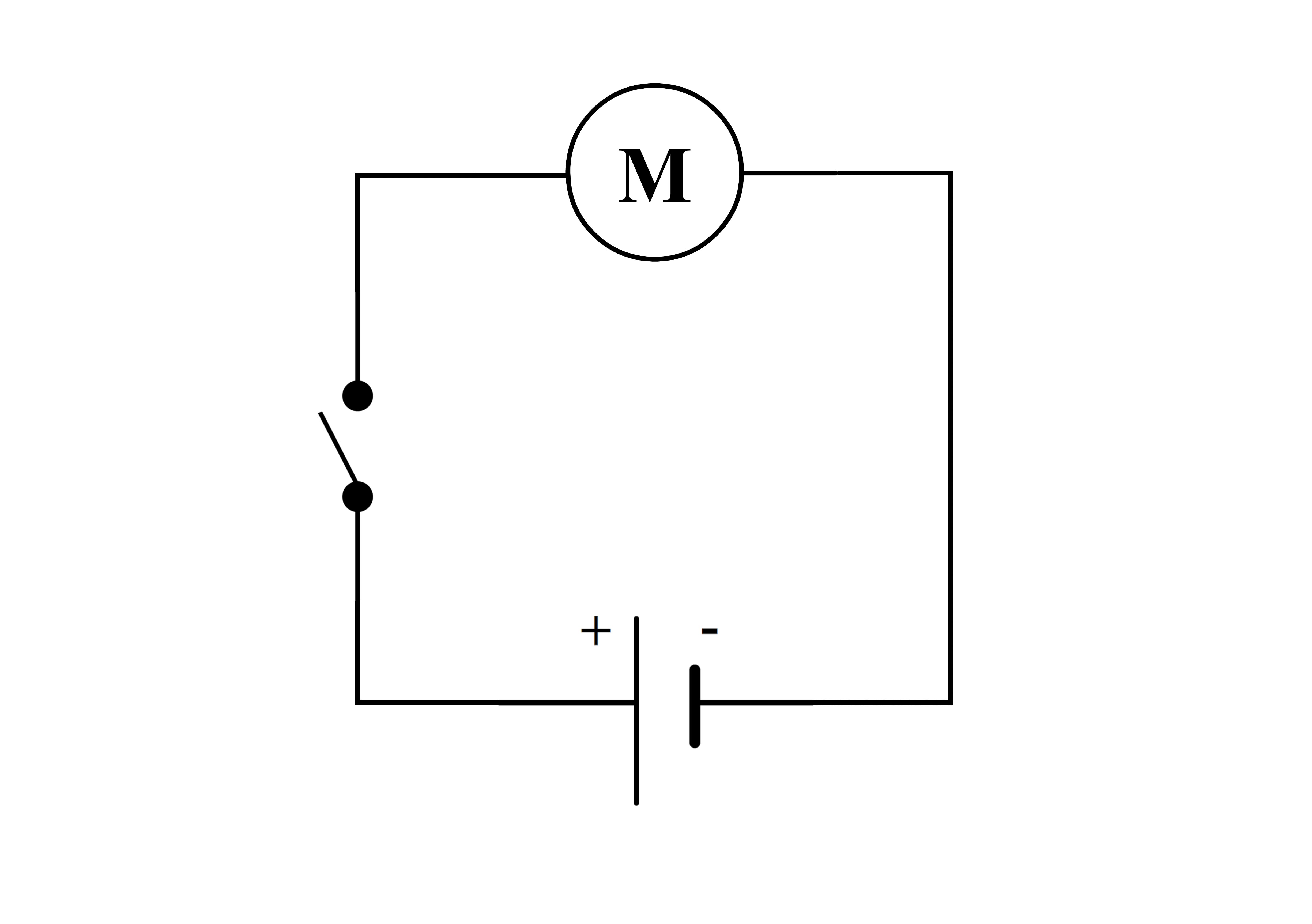
Soudure à l'étain du circuit électrique du moteur (boîtier de piles, interrupteur et moteur)
Étape 3
Assemblage du robot
Journal de bord
05/12/2023
Impression de la première partie des pièces
15/12/2023
Impression de la deuxième partie des pièces et soudure à l'étain du circuit électrique (moteur, interrupteur, boîtier de piles)
21/12/2023
2 soudures refaites car elle se sont cassées (les câbles se sont rompus)