Projet de : Ayoub, Julie, Joachim
I- Les différentes solutions envisageables
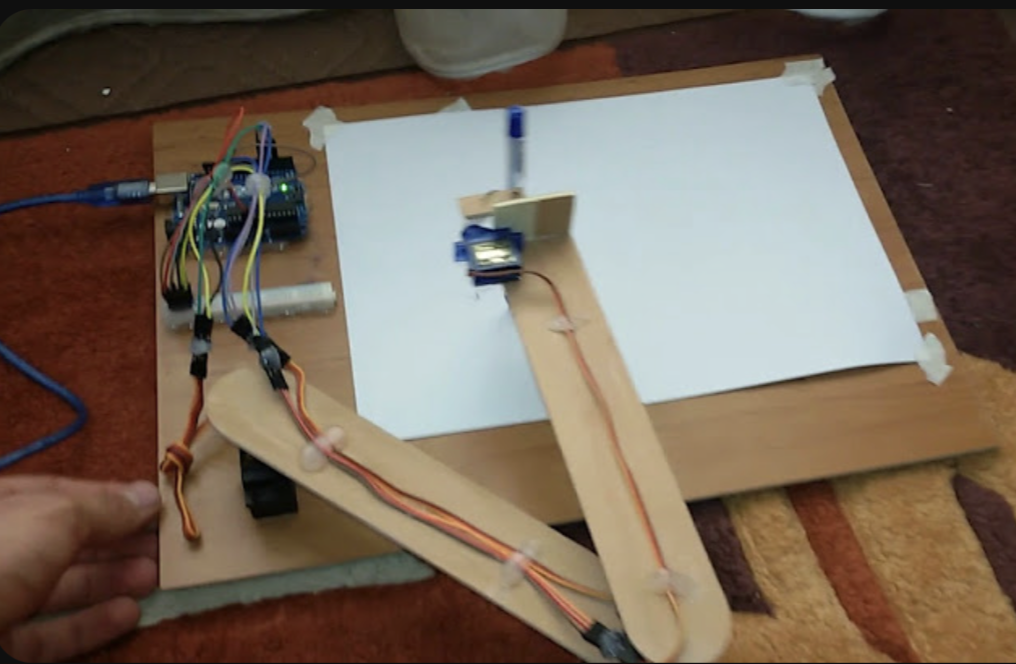
Première solution : 2 degree of freedom Writer Robot (arm)
Le robot écrivain à deux degrés de liberté est un système conçu pour manipuler un stylo ou un crayon sur une surface plane afin de dessiner ou d'écrire. Il se compose généralement d'un bras robotisé doté de deux articulations qui lui permettent de se déplacer dans deux directions différentes : horizontalement et verticalement.
Fonctionnement de cette solution :
Contrôle de la position horizontale et verticale :
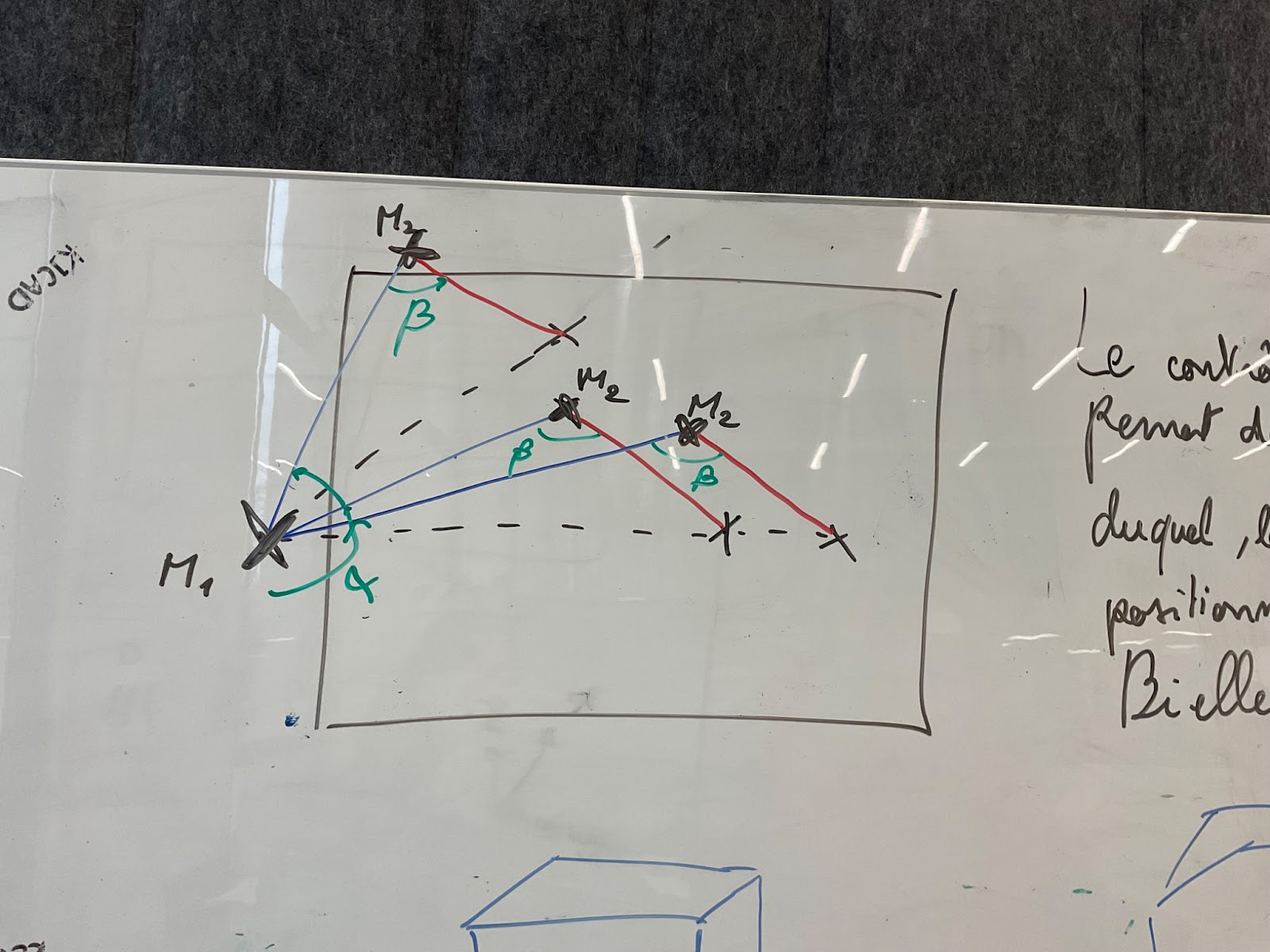
Les deux gros servomoteurs sont utilisés pour contrôler la position du bras robotisé dans les axes horizontal et vertical. Chaque moteur est relié à une articulation du bras, ce qui permet de déplacer le stylo sur la surface de manière précise et contrôlée.
Contrôle du contact du stylo :
Le petit servomoteur est utilisé pour la fonction de contact ou non du stylo, est intégré à un mécanisme de crémaillère. Ce mécanisme est conçu pour abaisser ou lever le stylo en fonction des instructions données au robot
Avantages :
- Structure simple et compacte, facilitant la conception, la fabrication et la maintenance.
- Coût de production potentiellement plus bas en raison de sa simplicité.
- Contrôle relativement simple en raison du nombre limité de degrés de liberté.
- Adapté aux applications où l'espace est restreint en raison de sa compacité.
Inconvénients :
- Capacité limitée à réaliser des mouvements complexes ou des dessins détaillés en raison du nombre restreint de degrés de liberté.
- Moins précis et moins polyvalent que les robots avec plus de degrés de liberté.
- Limitations dans la portée des mouvements en raison de sa conception.
- Peut ne pas être adapté pour des tâches nécessitant une grande précision.