Projet de : Ayoub, Julie, Joachim
Dossier de conception préliminaire :
Informations
-
Prénoms et noms :
-
Ayoub HADJAB
-
Joachim PERRIN
-
Julie MAUGUIT
-
Adresses mail :
-
ayoub.hadjab@etu.sorbonne-universite.fr
-
joachim.perrin@etu.sorbonne-universite.fr
-
Cursus :
1ere année cycle ingénieur en Robotique à Polytech Sorbonne
-
Date de début - Date de fin :
Mercredi 7 Février 2024 jusqu'au Mercredi 22 Mai 2024
Cahier des charges
Définition du projet :
Le projet robotique de ce semestre est de concevoir et réaliser une solution qui répond aux différentes consignes données ci-dessous :
-
Tracer différentes figures prédéfinies dans un carré de 5cm x 5cm, en 10 secondes.
-
Une ligne droite de 5 cm
-
Une ligne pointillée de 5 cm
-
Un cercle de 2,5cm de rayon
-
Un cercle pointillé de 2,5cm de rayon
-
Reproduire un dessin imposé (mais inconnu à l’avance) à l’aide d’un joystick dans un carré de 5cm x 5cm
-
Contrôle au moyen d’un joystick
Objectifs du projet
Pour répondre aux consignes du projet, nous avons réfléchi à trois différentes solutions de système robotisé.
Les trois peuvent être réalisables mais deux des solutions sont plus complexes à concevoir et réaliser. PAS UTILE ICI
Description fonctionnelle des besoins
Fonction contrainte (externe au robot) : s’adapter au stylo
Fonction contrainte (externe au robot) : s’appuyer sur la table
Fonction principale (robot) : dessiner les formes/dessins demandés
Moyens à disposition
Pour réaliser notre solution, nous aurons besoin des procédés de fabrication suivants :
- L’impression 3D afin de faire la liaison entre le moteur et le stylo et réaliser la translation du stylo pour avoir contact entre le stylo et le sol ou non
- Le laser afin de faire les différents axes (corps plutôt ? ) qui sont reliés aux 2 autres moteurs.
Le matériel à disposition est :
-
Un crayon
-
Interface de commande :
-
Une carte arduino UNO avec câble USB-B;
-
Un joystick:
-
Une platine de prototypage;
-
Alimentation régulée 5V ;
-
Câbles, LEDs, boutons poussoirs, résistances.
-
Motorisation :
-
Deux servomoteurs HS422 180°;
-
Un servomoteur Emax ES08A 180°.
-
Mécanique :
-
Matière PLA pour impression 3D;
-
Feuilles medium : 3mm et 6mm d'épaisseur;
-
Vis et écrous : M2, M2.5, M3, M4.
-
Roulements et axes de diamètre 4mm.
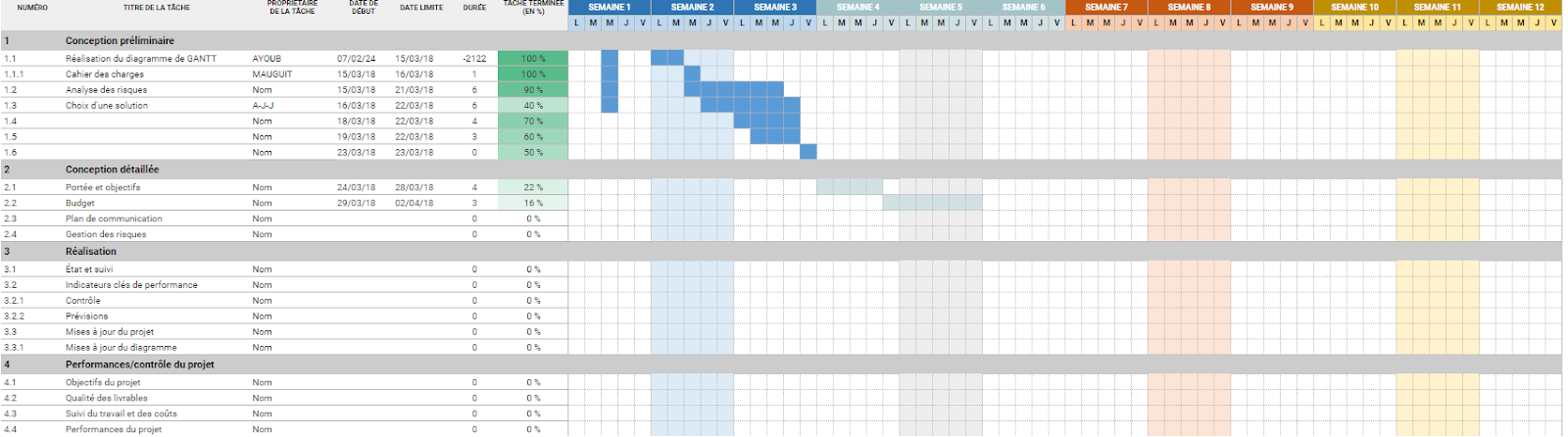
Diagramme de Gantt
A compléter
Propositions de réalisation
Première solution : 2 degree of freedom Writer Robot (arm)
Le robot écrivain à deux degrés de liberté est un système conçu pour manipuler un stylo ou un crayon sur une surface plane afin de dessiner ou d'écrire. Il se compose généralement d'un bras robotisé doté de deux articulations qui lui permettent de se déplacer dans deux directions différentes : horizontalement et verticalement.
Fonctionnement de cette solution :
Contrôle de la position :
Les deux gros servomoteurs sont utilisés pour contrôler la position des deux axes du bras robotisé. Chaque moteur est relié à une articulation du bras, ce qui permet de déplacer le stylo sur la surface de manière précise et contrôlée. Le contrôle de la position se fait en coordonnées polaires.
Contrôle du contact du stylo :
Le petit servomoteur est utilisé pour la fonction de contact ou non du stylo, est intégré à un mécanisme de crémaillère. Ce mécanisme est conçu pour abaisser ou lever le stylo en fonction des instructions données au robot.
Avantages :
-
Structure simple et compacte, facilitant la conception, la fabrication et la maintenance.
-
Coût de production potentiellement plus bas en raison de sa simplicité.
-
Contrôle relativement simple en raison du nombre limité de degrés de liberté.
-
Adapté aux applications où l'espace est restreint en raison de sa compacité.
Inconvénients :
-
Capacité limitée à réaliser des mouvements complexes ou des dessins détaillés en raison du nombre restreint de degrés de liberté.
-
Moins précis et moins polyvalent que les robots avec plus de degrés de liberté.
-
Limitations dans la portée des mouvements en raison de sa conception.
-
Peut ne pas être adapté pour des tâches nécessitant une grande précision.
Deuxième solution :
Cette solution serait composée de deux axes liés aux 2 gros moteurs par des paliers lisses, et un petit moteur avec son axe qui commande la position de l’effecteur (entre les 2 états possible : contact ou non-contact).
Fonctionnement de cette solution :
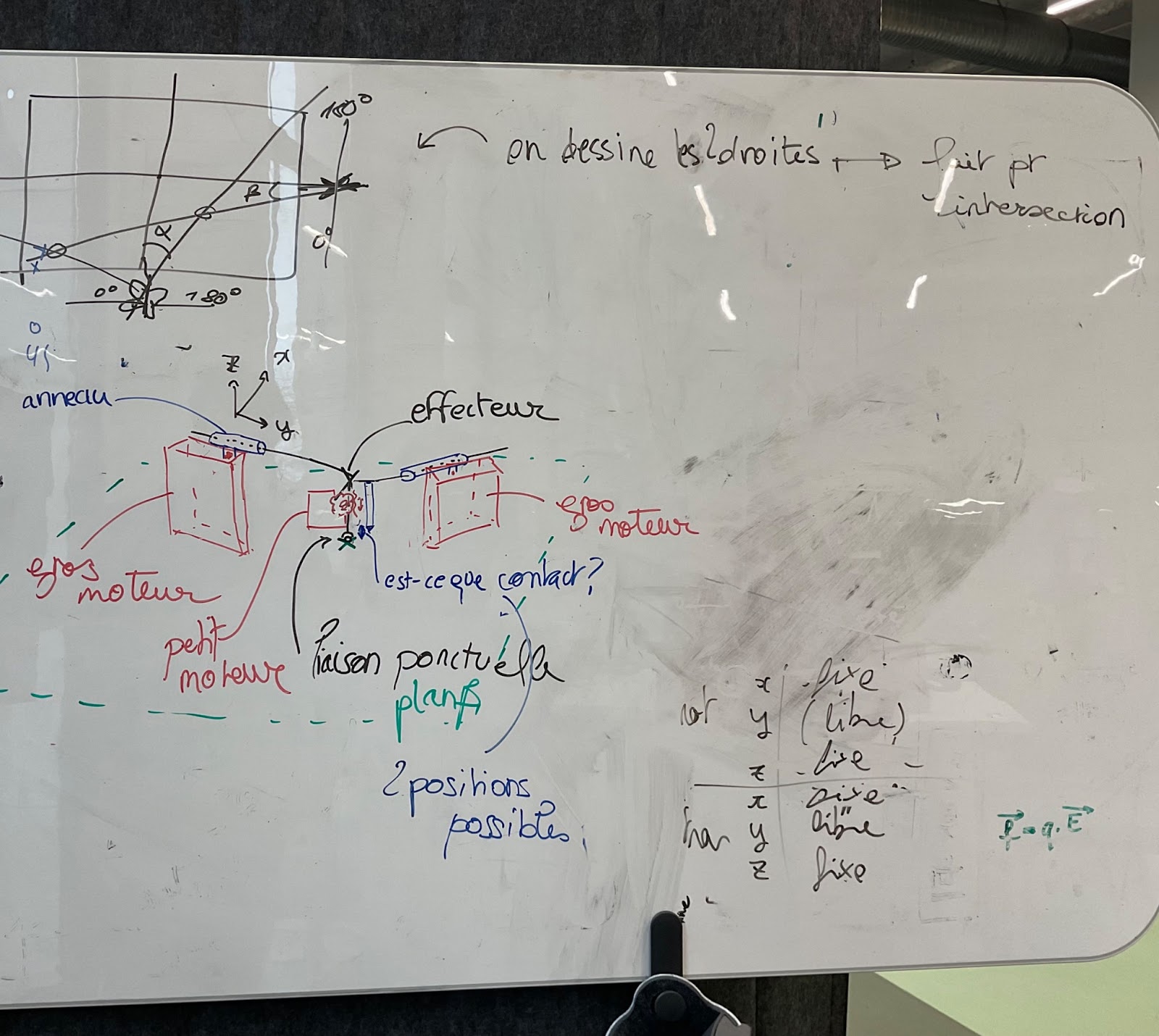
L'effecteur se trouve à la jonction de deux axes, lesquels sont contrôlés par les deux servomoteurs. la liaison entre les axes et le bâti permet aux axes de glisser. De cette façon, on peut modéliser ce système comme deux droites de longueur variables dont le croisement dans le plan de la feuille se trouve être la position du stylo. De la même façon que pour la première solution, le troisième servomoteur est utilisé pour contrôler le contact entre la feuille et le stylo. Une roue folle de guidage est donc nécéssaire pour soutenir l'effecteur.
Inconvénient :
-
Les liaisons n'étant pas parfaites, cette solution requiert une attention particulière aux forces de frottements.
-
Des calculs complexes (pas en coordonnées cartésiennes ou polaire)
-
Structure difficile à déplacer
-
Manque de précision
Avantage :
-
Pas beaucoup d’utilisation de matières
Mais d’après les différents inconvénients, on se rend bien compte qu'il est compliqué de réaliser cette solution.
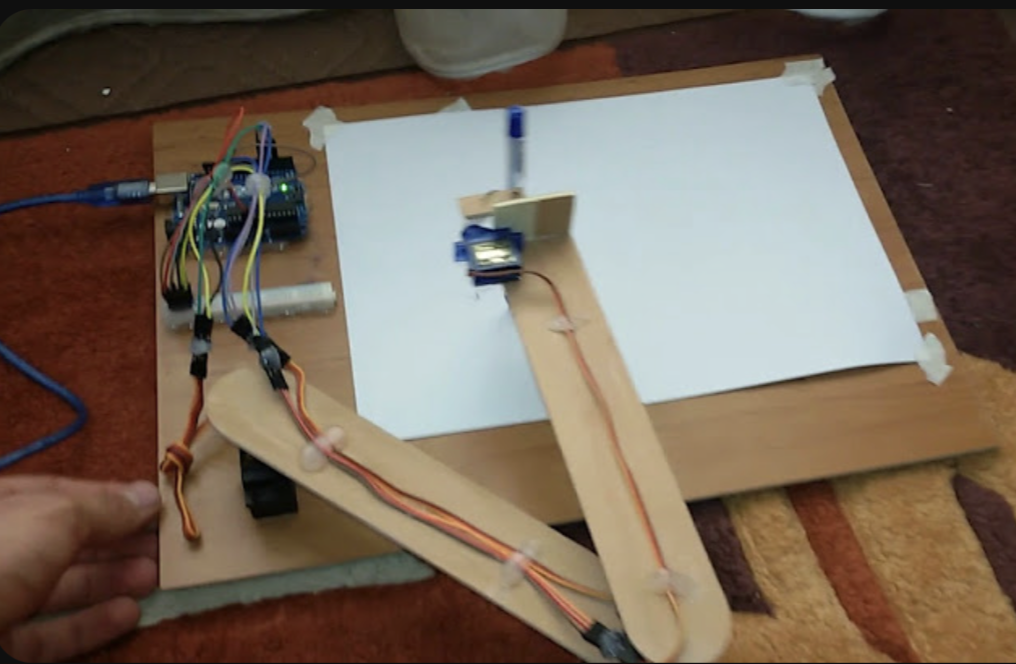
Troisième solution : Procédé pantographe
La construction d’un pantographe commence par relier deux paires de bras – une paire longue et une paire courte – bout à bout avec une articulation pivotante, formant une paire de formes en V flexibles. Les extrémités libres des bras courts sont reliées par des articulations pivotantes aux centres des bras longs, formant un parallélogramme ou une forme de losange, avec deux bras s’étendant depuis les côtés supérieurs du losange. Un stylet est placé sur le pivot au bas du diamant et un stylo est attaché à l’extrémité d’un bras. L’extrémité de l’autre bras est verrouillée dans une position fixe pendant la copie.
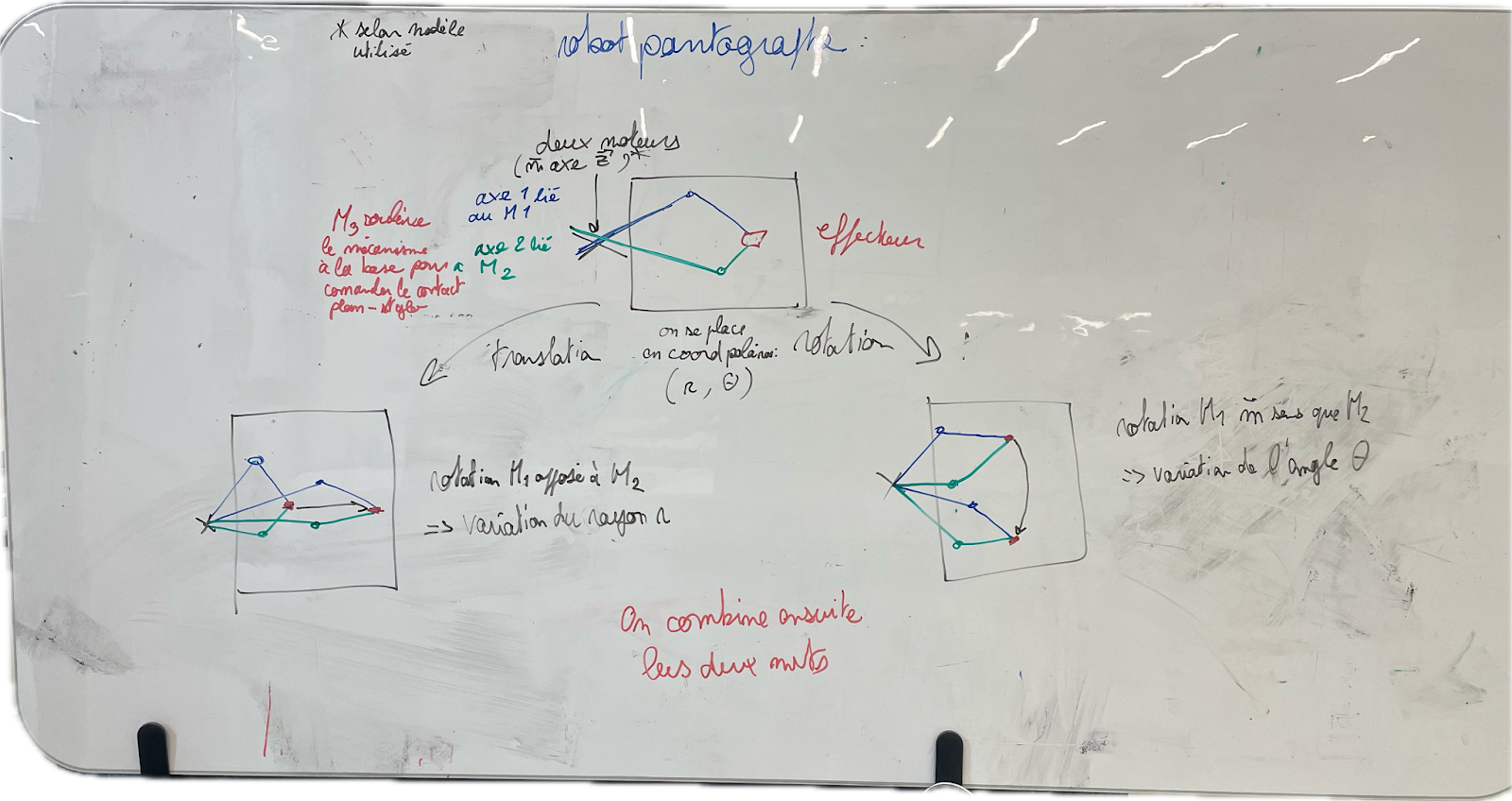
Pour contrôler la position du stylo par rapport à la surface de l'écriture. Notre approche repose sur l'utilisation d'un servo-moteur modifié et d'un mécanisme d'engrenage pour permettre deux modes de fonctionnement distincts.
Description du Système :
Dans notre configuration, nous avons retiré l'hélice du servo-moteur, ne conservant que l'arbre moteur (nous avons jugé que les forces en jeu sont assez faibles pour ne pas se soucier de l’effort transmis directement sur l’arbre moteur). Sur cet arbre moteur, nous avons fixé une roue dentée préalablement conçue à l'aide de logiciels de modélisation 3D tels que SolidWorks. Cette roue dentée est essentielle pour la transmission du mouvement à un système d'engrenage plus complexe.
Fonctionnement :
Le système d'engrenage que nous avons mis en place permet deux modes de fonctionnement distincts du stylo :
- Mode d'Écriture :
Dans ce mode, le stylo est en contact direct avec la surface de l'écriture (feuille). Le robot est alors simplement en appuie sur la surface de contact et le troisième servomoteur n'est pas engagé.
- Mode Repos :
Contrairement au mode d'écriture, dans ce mode, le stylo est légèrement surélevé par rapport à la surface de l'écriture, évitant ainsi tout contact. Pour ce faire, le petit servomoteur est réglé de manière à soulever le robot par la base (avec un système de levier).
Avantages :
-
grande polyvalence d’échelle pour les bras
-
comparée à aux deux premières solutions envisagées, celle-ci permet d'alleger la partie mobile car les trois moteurs sont à la base du robot. OUI
Inconvénients :
- Les équation de mouvement ne sont pas simple à determiner. SI
Solution choisie :
Finalement, nous avons décidé de choisir le procédé pantographe. En effet, celui-ci nous semble le plus adapté car c'est celui qui présente le moins d'inconvénients.
Partie mécanique :

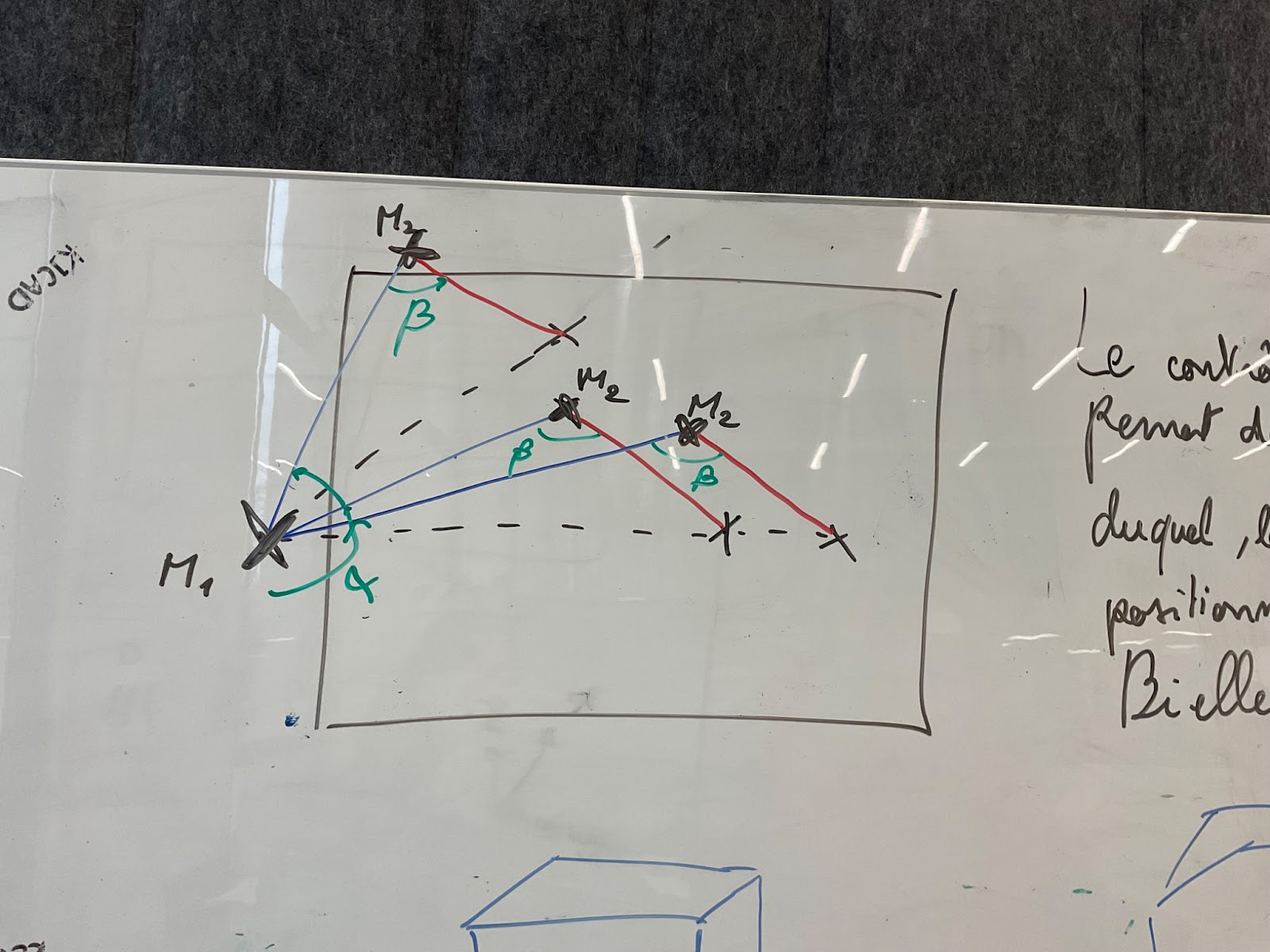
L'origine de mon repère est le point O = P1
Dans cette partie nous allons calculer le modèle géométrique inverse de notre robot. Le modèle géométrique inverse est un concept crucial en robotique qui permet de déterminer les positions et orientations des moteurs nécessaires de notre robot pour atteindre une position spécifique avec son effecteur. En d'autres termes, il s'agit de calculer les angles des articulations en fonction des coordonnées de l'extrémité du robot dans l'espace.
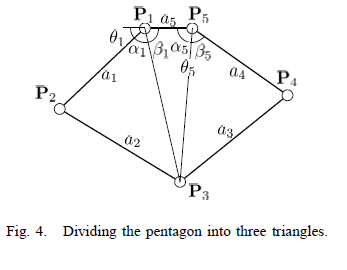
Dans le cadre de notre projet de conception d'un robot écrivain, nous avons utilisé le modèle géométrique inverse pour contrôler précisément les mouvements de notre robot. Notre approche pour calculer ce modèle géométrique inverse consiste à diviser le pentagone formé par notre robot en trois triangles, puis à appliquer le théorème d'Al-Kashi dans chaque triangle.
Plus précisément, nous avons décomposé la structure du pantographe en trois triangles pour simplifier le calcul des angles nécessaires pour positionner l'extrémité du robot.



La fonction atan2 est une fonction trigonométrique qui donne l'angle en radians entre l'axe x positif et un point donné dans le plan xy, en tenant compte des signes des coordonnées x et y pour déterminer le quadrant dans lequel se trouve le point.
Pour une explication détaillée des calculs effectués pour obtenir le modèle géométrique inverse de notre robot pantographe, veuillez consulter le document disponible à l'adresse suivante :