Projet de ROB3 : Damien CORSET et Romane COUEDEL
Informations
-
CORSET Damien - damien.corset@etu.sorbonne-universite.fr
-
COUEDEL Romane - romane.couedel@etu.sorbonne-universite.fr
-
Date de début : 08/02/2024 - Date de fin : 02/05/2024
Introduction
Le projet Robot Écrivain a pour objectif de concevoir un système robotique capable de dessiner sur une surface plane horizontale. En combinant les domaines de la mécanique, de l'électronique et de la programmation, notre équipe s'engage à relever ce défi. Pour ce faire, nous devons respecter un cahier des charges précis et utiliser les machines disponibles au FABLAB, ainsi qu'une liste de matériel prédéfinie. Ce projet représente une opportunité d'apprentissage, nous permettant de développer nos compétences en collaboration d'équipe et en utilisant des technologies avancées comme la découpe LASER et l'impression 3D.
Cahier des charges
Le robot doit être fixé ou posé sur une plaque horizontale carrée de 250mm par 250mm et doit être capable de réaliser les deux exercices suivants :
Exercice 1
Le robot doit être capable de tracer différentes figures imposées dans le plan de la plaque support, avec un crayon fixé sur son organe terminal. Chaque figure doit être réalisée en 10 secondes, avec une marge d'erreur de +/- 0,2 secondes. Les chiffres imposés sont les suivants :
-
Une ligne de 5 cm de long,
-
Une ligne pointillée de 5cm de long,
-
Un cercle de 2,5 cm de rayonne,
-
Un cercle pointillé de 2,5 cm de rayonne.
Exercice 2
Le robot doit être capable de tracer un dessin dans un carré de dimensions 5 cm par 5 cm, avec un crayon fixé sur son organe terminal. Le déplacement de celui-ci doit être contrôlé par un joystick. Il est important de noter que la figure à tracer peut être discontinue, ce qui signifie qu'il faut prévoir la possibilité de relever le crayon du support horizontal pendant le tracé.
De plus, une fonctionnalité facultative consiste à offrir la possibilité de régler la vitesse de déplacement du robot via l'interface utilisateur. Cela permet d'ajuster la vitesse de tracé en fonction des besoins spécifiques de chaque dessin.
Fonctions contraintes
Les contraintes imposées pour le projet Robot Écrivain sont :
-
Respect des règles d'utilisation du FABLAB de Sorbonne Université
-
Utilisation de composants (moteurs, contrôleurs, boutons, éléments de guidage, alimentation stabilisée, boutons, etc.) parmi un ensemble imposé.
-
Fabrication des pièces grâce au Machine à découpe LASER et Imprimantes RAISE 3D PRO2.
-
Programmation en C utilisant la chaîne de développement Arduino IDE.
Liste des composants et matériels disponibles
-
Un crayon
-
Interface de commande :
-
Une carte Arduino UNO avec câble USB-B;
-
Un joystick:
-
Une platine de prototypage;
-
Alimentation régulée 5V ;
-
Câbles, LEDs, boutons poussoirs, résistances.
-
Motorisation :
-
Deux servomoteurs HS422 180°;
-
Un servomoteur Emax ES08A 180°.
-
Mécanique :
-
Matière PLA pour impression 3D;
-
Feuilles medium : 3mm et 6mm d'épaisseur;
-
Vis et écrous : M2, M2.5, M3, M4.
-
Roulements et axes de diamètre 4mm.
Gantt
Répartition du travail en équipe ici.
Propositions de réalisation
Proposition 1:
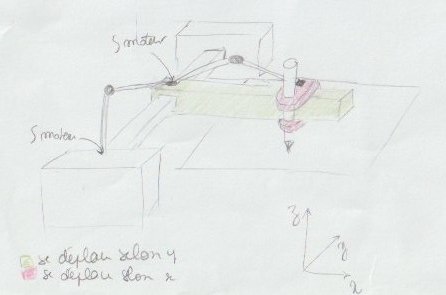
Cette proposition utilise un système comprenant un premier rail de guidage linéaire immobile, fixé à deux masses, auquel est ajouté un chariot. Un second rail, perpendiculaire au premier, est également présent. Sur ce rail mobile, un chariot est fixé, intégrant l'effecteur, ici un stylo. Ainsi, lorsque le rail mobile se déplace, le stylo se déplace selon l'axe y, et lorsque le chariot bouge, le stylo se déplace selon l'axe x, conformément au repère tracé sur le dessin. Un premier servomoteur est utilisé pour déplacer le chariot le long de l'axe y, et un second, fixé sur le chariot, contrôle les déplacements de l'effecteur le long de l'axe x. Enfin, un dernier servomoteur, plus petit, est monté sur le chariot afin de pouvoir abaisser ou relever le stylo.
Inspiration : AxiDraw V3
Proposition 2:
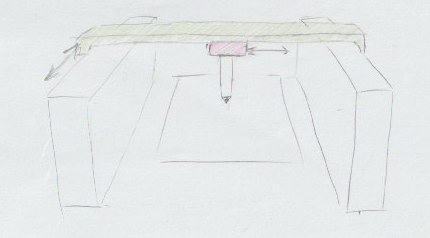
Dans la même idée que la proposition 1, cette proposition est constituée d’un chariot auquel est fixé le stylo, qui se déplace linéairement sur un rail de guidage mobile qui lui-même se déplace linéairement et repose sur deux autres rails immobiles. Ce système est déjà commercialisé non pas pour faire du dessin mais plutôt pour de la gravure au laser.
Pour les mêmes raisons que précédemment cette proposition ne sera pas notre choix final.
Inspiration : Machine à Graver Laser
Proposition 3
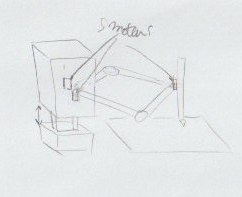
Le robot est composé d'un corps principal sur lequel est montés deux servomoteurs pour contrôler les bras. Les bras sont joints au niveau de leur main, où est fixé le crayon. Pour relever le crayon, nous avions pensé à soulever le corps du robot mais il est possible que le servomoteur ne supporte pas la charge de tout le système.
Inspiration : Robot dessinateur
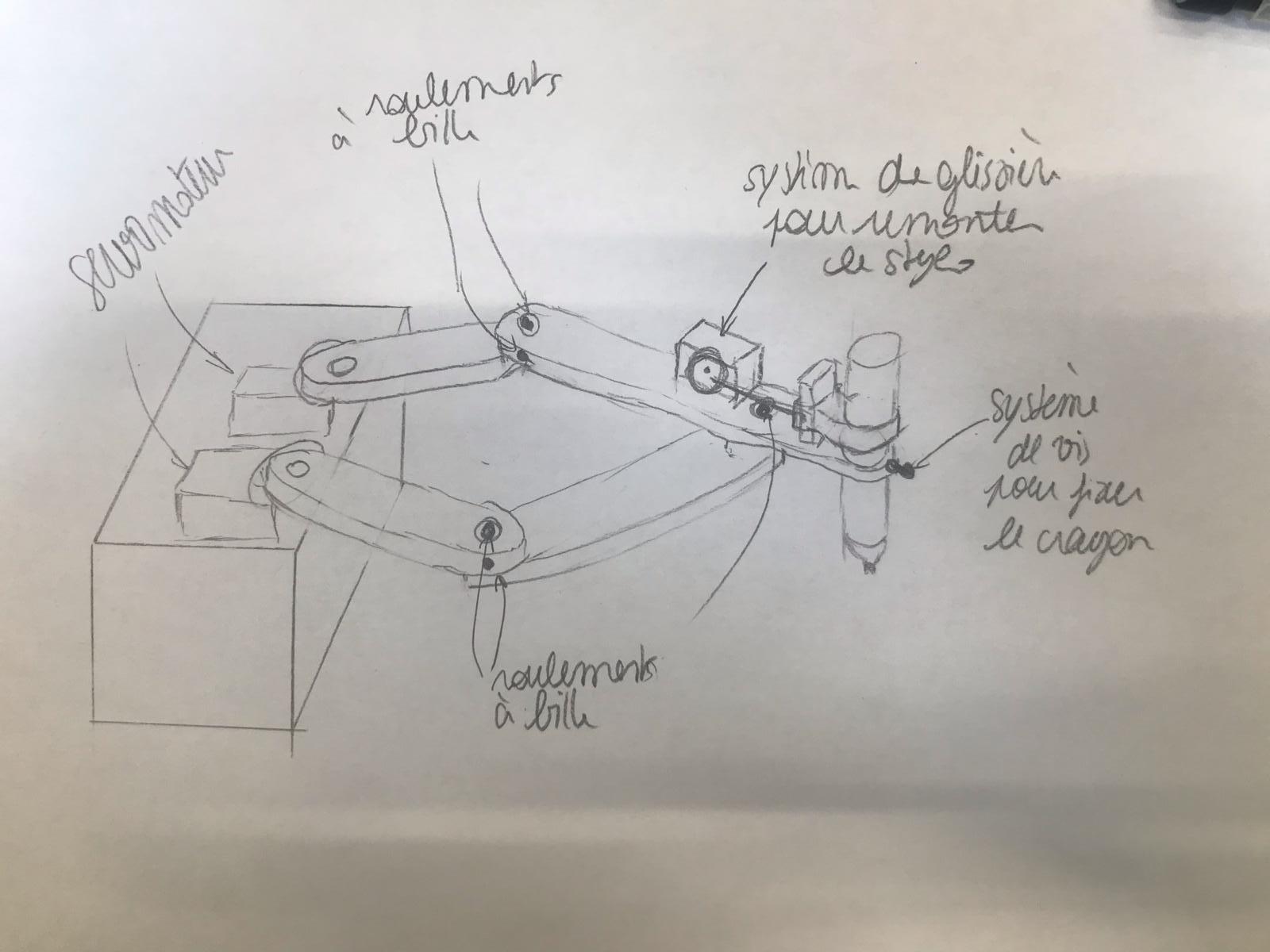
Proposition 4:
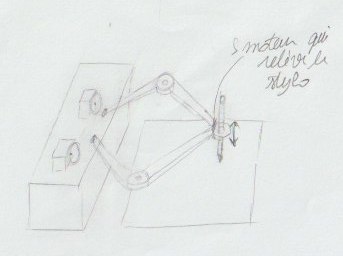
Cette idée reprend la proposition 3, mais au lieu de soulever le corps entier du robot pour relever le cayon, on met en place un mécanisme indépendant pour soulever uniquement le crayon. Le mécanisme se situe au niveau des principales articulations. Il existe tout de même un risque minime que l'ensemble soit trop lourd à porter pour les deux servomoteurs si les mains trop lourdes et/ou si la longueur des bras sont trop importantes. Cependant ces servomoteurs sont plus gros et plus puissants que celui qui se situe sur les mains. L'inconvénient de ce système se situe au niveau de la tenue du crayon, puisqu'il faut à la fois qu'il soit serré et qu'il soit glissant pour permettre le mouvement des soutiens-gorge.
Choix :
Cette solution reprend la proposition 4, sauf qu'on allonge l'avant bras sur lequel est fixé le servomoteur du crayon. Le crayon se trouve à l'extrémité de cet avant-bras où il est serré. Entre le crayon et le servomoteur qui le relève, les deux soutiens-gorgepièces se rejoignent ce qui permet le mouvement.