Projet de ROB3 : Damien CORSET et Romane COUEDEL
Informations
-
CORSET Damien - damien.corset@etu.sorbonne-universite.fr
-
COUEDEL Romane - romane.couedel@etu.sorbonne-universite.fr
-
Date de
dédébut : 08/02/2024 - Date de fin : 02/05/2024
Introduction
Le projet Robot ÉÉcrivain a pour objectif de concevoir un systèsystème robotique capable de dessiner sur une surface plane horizontale. En combinant les domaines de la mémécanique, de l'éélectronique et de la programmation, notre ééquipe s'engage àà relever ce dédéfi. Pour ce faire, nous devons respecter un cahier des charges préprécis et utiliser les machines disponibles au FABLAB, ainsi qu'une liste de matématériel prédéprédéfinie. Ce projet repréreprésente une opportunitéopportunité d'apprentissage, nous permettant de dédévelopper nos compécompétences en collaboration d'ééquipe et en utilisant des technologies avancéavancées comme la dédécoupe LASER et l'impression 3D.
Cahier des charges
Le robot doit êêtre fixéfixé ou poséposé sur une plaque horizontale carrécarrée de 250mm par 250mm et doit êêtre capable de réréaliser les deux exercices suivants :
Exercice 1
Le robot doit êêtre capable de tracer diffédifférentes figures imposéimposées dans le plan de la plaque support, avec un crayon fixéfixé sur son organe terminal. Chaque figure doit êêtre réaliséréalisée en 10 secondes, avec une marge d'erreur de +/- 0,2 secondes. Les chiffres imposéimposés sont les suivants :
-
Une ligne de 5 cm de long,
-
Une ligne
pointillépointillée de 5cm de long, -
Un cercle de 2,5 cm de rayonne,
-
Un cercle
pointillépointillé de 2,5 cm de rayonne.
Exercice 2
Le robot doit êêtre capable de tracer un dessin dans un carrécarré de dimensions 5 cm par 5 cm, avec un crayon fixéfixé sur son organe terminal. Le dédéplacement de celui-ci doit êêtre contrôlécontrôlé par un joystick. Il est important de noter que la figure àà tracer peut êêtre discontinue, ce qui signifie qu'il faut préprévoir la possibilitépossibilité de relever le crayon du support horizontal pendant le tracétracé.
De plus, une fonctionnalitéfonctionnalité facultative consiste àà offrir la possibilitépossibilité de rérégler la vitesse de dédéplacement du robot via l'interface utilisateur. Cela permet d'ajuster la vitesse de tracétracé en fonction des besoins spéspécifiques de chaque dessin.
Fonctions contraintes
Les contraintes imposéimposées pour le projet Robot ÉÉcrivain sont :
-
Respect des
rèrègles d'utilisation du FABLAB de SorbonneUniversitéUniversité -
Utilisation de composants (moteurs,
contrôcontrôleurs, boutons,élééléments de guidage, alimentationstabiliséstabilisée, boutons, etc.) parmi un ensembleimposéimposé. -
Fabrication des
pièpiècesgrâgrâce au Machineààdédécoupe LASER et Imprimantes RAISE 3D PRO2. -
Programmation en C utilisant la
chaîchaîne dedédéveloppement Arduino IDE.
Liste des composants et matématériels disponibles
-
Un crayon
-
Interface de commande :
-
Une carte Arduino UNO avec
câcâble USB-B; -
Un joystick:
-
Une platine de prototypage;
-
Alimentation
régulérégulée 5V ; -
CâCâbles, LEDs, boutons poussoirs,rérésistances. -
Motorisation :
-
Deux servomoteurs HS422
180°180°; -
Un servomoteur Emax ES08A
180°180°. -
MéMécanique : -
MatièMatière PLA pour impression 3D; -
Feuilles medium : 3mm et 6mm d'
éépaisseur; -
Vis et
éécrous : M2, M2.5, M3, M4. -
Roulements et axes de
diamèdiamètre 4mm.
Gantt
RéRépartition du travail en ééquipe ici.
I - Conception prépréliminaire
Proposition 1:
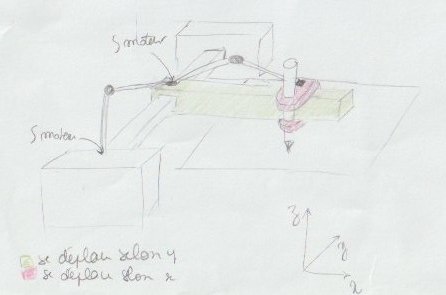
Cette proposition utilise un systèsystème comprenant un premier rail de guidage linélinéaire immobile, fixéfixé àà deux masses, auquel est ajoutéajouté un chariot. Un second rail, perpendiculaire au premier, est éégalement préprésent. Sur ce rail mobile, un chariot est fixéfixé, intéintégrant l'effecteur, ici un stylo. Ainsi, lorsque le rail mobile se dédéplace, le stylo se dédéplace selon l'axe y, et lorsque le chariot bouge, le stylo se dédéplace selon l'axe x, conforméconformément au repèrepère tracétracé sur le dessin. Un premier servomoteur est utiliséutilisé pour dédéplacer le chariot le long de l'axe y, et un second, fixéfixé sur le chariot, contrôcontrôle les dédéplacements de l'effecteur le long de l'axe x. Enfin, un dernier servomoteur, plus petit, est montémonté sur le chariot afin de pouvoir abaisser ou relever le stylo.
Inspiration : AxiDraw V3
Proposition 2:
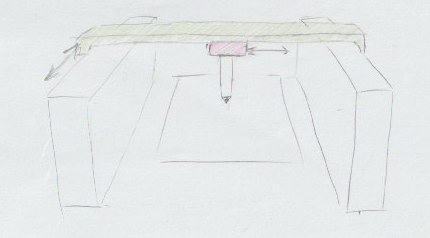
Dans la mêmême idéidée que la proposition 1, cette proposition est constituéconstituée d’d’un chariot auquel est fixéfixé le stylo, qui se dédéplace linélinéairement sur un rail de guidage mobile qui lui-mêmême se dédéplace linélinéairement et repose sur deux autres rails immobiles. Ce systèsystème est déjàdéjà commercialisécommercialisé non pas pour faire du dessin mais plutôplutôt pour de la gravure au laser.
Pour les mêmêmes raisons que précéprécédemment cette proposition ne sera pas notre choix final.
Inspiration : Machine àà Graver Laser
Proposition 3:
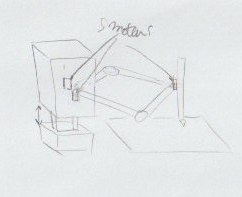
Le robot est composécomposé d'un corps principal sur lequel est montémontés deux servomoteurs pour contrôcontrôler les bras. Les bras sont joints au niveau de leur main, oùoù est fixéfixé le crayon. Pour relever le crayon, nous avions pensépensé àà soulever le corps du robot mais il est possible que le servomoteur ne supporte pas la charge de tout le systèsystème.
Inspiration : Robot dessinateur
Proposition 4:
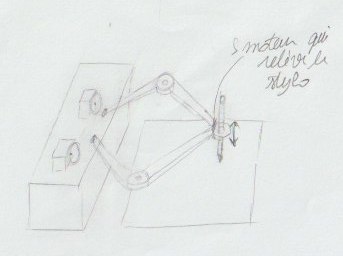
Cette idéidée reprend la proposition 3, mais au lieu de soulever le corps entier du robot pour relever le cayon, on met en place un mémécanisme indéindépendant pour soulever uniquement le crayon. Le mémécanisme se situe au niveau des principales articulations. Il existe tout de mêmême un risque minime que l'ensemble soit trop lourd àà porter pour les deux servomoteurs si les mains trop lourdes et/ou si la longueur des bras sont trop importantes. Cependant ces servomoteurs sont plus gros et plus puissants que celui qui se situe sur les mains. L'inconvéinconvénient de ce systèsystème se situe au niveau de la tenue du crayon, puisqu'il faut àà la fois qu'il soit serréserré et qu'il soit glissant pour permettre le mouvement des pièpièces.
Choix retenu:
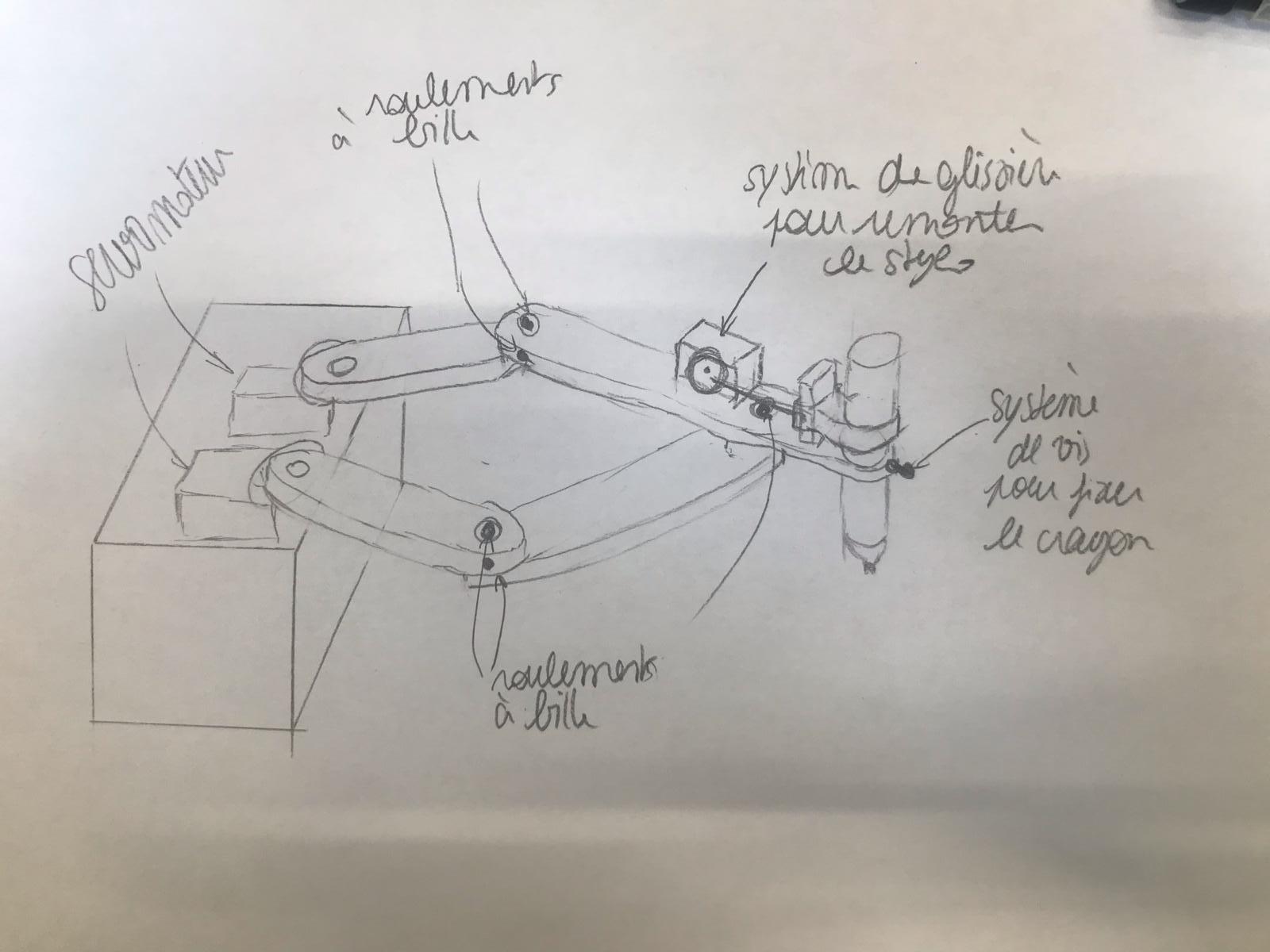
Cette solution reprend la proposition 4, sauf qu'on allonge l'avant bras sur lequel est fixéfixé le servomoteur du crayon. Le crayon se trouve àà l'extrémitéextrémité de cet avant-bras oùoù il est serréserré. Entre le crayon et le servomoteur qui le relèrelève, les deux pièpièces se rejoignent ce qui permet le mouvement.
II - Conception détaillédétaillée
2.1. Conception mémécanique
2.1.1. ModéModélisation et vévérification des ajustements
Nous avons utiliséutilisé le logiciel de CAO SolidWorks pour modémodéliser l'ensemble du robot. Pour simplifier notre processus de conception et d'assemblage, nous avons divisédivisé l'assemblage en plusieurs parties distinctes :
-
Le premier sous-assemblage,
nomménommé "base", est unboîboîtier abritant tous les composantséélectroniques, laissant les deux servomoteurs des bras visiblesàà l'extéextérieur. Sur le dessus de ceboîboîtier, se trouve le joystick, l'éléélément unique avec lequel l'utilisateur interagit. Pour faciliter le montage, des ouvertures sontpréprévues sur la plaquesupésupérieure duboîboîtier pour permettre le passage des moteurs et la fixation du joystick. De plus, une ouverturelatélatérale estréaliséréalisée pour permettre l'alimentation de la carte Arduino. La faceinféinférieure duboîboîtier estconstituéconstituée d'une plaque qui couvreentièentièrement la surface du robot, servant de support pour la feuille de dessin. -
Le
deuxièdeuxième sous-assemblage,appeléappelé "effecteur", est mis en place par l'utilisateuràà l'aide d'une vis, similaire au dispositif des compas, qui serre le stylo ausystèsystème. Pour lever le stylo, un petit servo-moteur estfixéfixé au bras le plus long,préprévu avec des encoches pour permettre sa fixation. Des trous sontéégalementpréprévus dans l'avant-bras pour fixer lemémécanisme de levage du stylo, qui serafabriquéfabriqué en impression 3D.
SéSéparer notre assemblage en plusieurs sous-assemblages simplifie l'identification et la manipulation de chaque composant individuel, favorise une meilleure collaboration entre les membres de l'ééquipe et simplifie la maintenance et les potentielles modifications ultéultérieures.
Il convient de souligner que notre processus de conception a nécessiténécessité la réréalisation de tests sur les pièpièces nénécessitant un montage serréserré, afin d'ajuster avec préprécision les dimensions des composants. Les variations dues aux ajustements et aux tolétolérances des machines ont étéété prises en compte pour garantir un assemblage correcte du robot.

Nous avons maximiser l'utilisation de la dédécoupe laser pour la fabrication de nos pièpièces pour plusieurs raisons. Tout d'abord, la dédécoupe laser offre une soliditésolidité, une préprécision supésupérieures et un avantage en termes de rapiditérapidité de production, nous permettant de concréconcrétiser notre projet de manièmanière efficace. De plus, cette méméthode nous a permis de réréduire les coûcoûts matématériels.
L'ensemble des pièpièces ainsi que l'assemblage sont disponibles en pièces jointes.ici. Les fichiers de fabrication sont éégalement disponibles aux formats DXF, SVG ou STL.
2.1.2. SchéSchéma cinécinématique
2.1.3. Calcul du modèmodèle géomégéométrique direct et inverse
Dans cette section, nous procéprocédons au calcul du modèmodèle géomégéométrique direct et inverse pour notre systèsystème. Ces calculs sont nénécessaires pour préprédire le comportement du systèsystème.
ModèModèle GéoméGéométrique Direct :
Le ModèModèle GéoméGéométrique Direct (MGD) permet de dédéterminer la position et l'orientation de l'effecteur final d'un robot en connaissant les valeurs des angles de ses articulations. En d'autres termes, il permet de préprédire oùoù se situera l'effecteur du systèsystème en fonction des positions de ses articulations.

DéDétails des calculs du MGD

ModèModèle GéoméGéométrique Inverse :
D'autre part, le ModèModèle GéoméGéométrique Inverse (MGI) permet àà l'inverse de calculer les valeurs des angles des articulations nénécessaires pour atteindre une position spéspécifique de l'effecteur final. Autrement dit, il permet dédéterminer les mouvements que le systèsystème doit effectuer pour placer son effecteur àà un endroit préprécis dans l'espace.

DéDétails des calculs du MGI

Pour valider nos rérésultats et assurer leur préprécision, nous avons utiliséutilisé les logiciels SolidWorks et MATLAB. SolidWorks a étéété employéemployé pour récrérécréer le modèmodèle du systèsystème àà l'aide d'une esquisse, tandis que MATLAB a étéété utiliséutilisé pour effectuer des simulations numénumériques àà l'aide des ééquations trouvétrouvées précéprécédemment. Les rérésultats de nos calculs sous Matlab ont étéété comparécomparés avec les valeurs renvoyérenvoyées par le logiciel SolidWorks.
Les fichiers SolidWorks et MATLAB correspondants sont disponibles en pièces jointes.ici.
2.2. Conception éélectronique
2.2.1. Architecture éélectronique
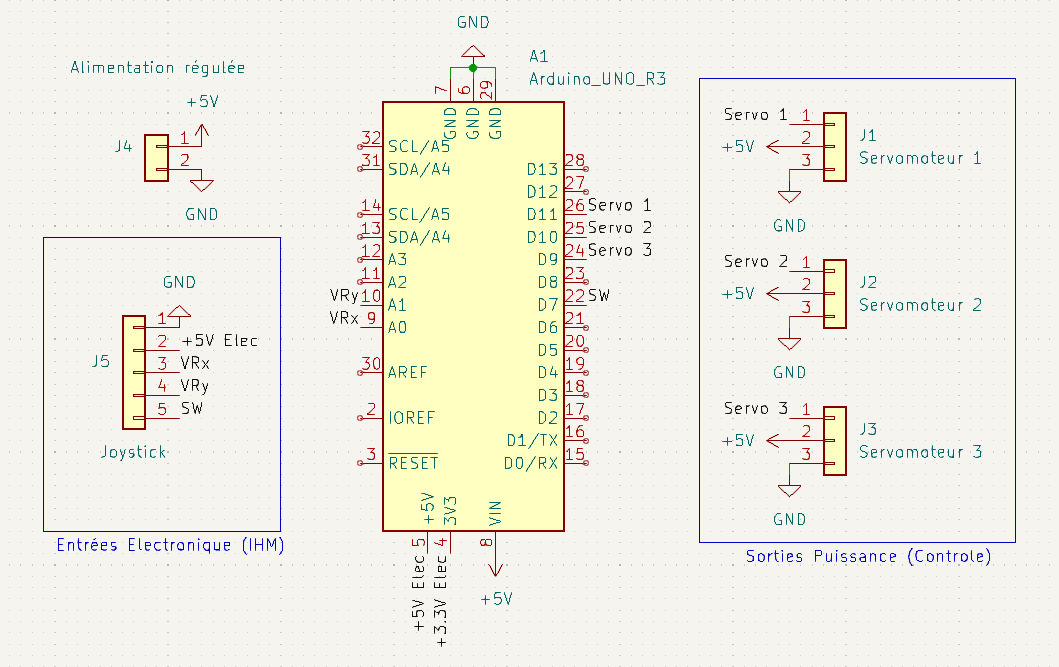
Dans notre conception éélectronique, nous distinguons deux aspects essentiels : l'éélectronique de commande, oùoù la carte Arduino UNO joue un rôrôle central dans la gestion et la synchronisation des composants, et l'éélectronique de puissance. Le joystick, en tant qu'interface utilisateur principale, transmet les donnédonnées d'entréentrée àà la carte Arduino. Les deux servomoteurs HS422 et le servomoteur FT90MR servent d'actionneurs, les HS422 contrôcontrôlant les mouvements du systèsystème en x et y et le FT90MR en contrôcontrôlant la hauteur du stylo sur l'axe z. Une alimentation régulérégulée de 5V assure une tension constante pour les moteurs. Cette alimentation régulérégulée alimente àà la fois la carte Arduino et les servomoteurs.
Il est important de noter que la carte Arduino ne peut pas fournir des courants élevéélevés àà des actionneurs tels que les servomoteurs. Cette limitation peut compromettre le fonctionnement de la carte et entraîentraîner des dysfonctionnements ou des dommages. C'est pourquoi en séséparant la partie puissance de la partie éélectronique, nous éévitons que la carte soit surchargésurchargée en courant ou détériorédétériorée.
Nous avons fait le choix d'utiliser uniquement un joystick dans notre systèsystème, ce qui permet àà la fois de naviguer dans les menus et de piloter manuellement le robot. Ce choix simplifie l'interface utilisateur et sera expliquéexpliqué en dédétail dans la section sur la conception logicielle.
2.2.2. SchéSchéma des connexions éélectriques
Nous utilisons le logiciel KiCad pour réréaliser le schéschéma des connexions. Il offre une interface conviviale et des fonctionnalitéfonctionnalités avancéavancées pour la conception de circuits éélectroniques. Il nous permet de repréreprésenter de manièmanière claire et préprécise les connexions entre les diffédifférents composants de notre systèsystème éélectronique.
2.3. Conception logicielle
2.3.1. Architecture du code

