Projet ROB3 : Damien CORSET et Romane COUEDEL
Informations
Information
-
CORSET Damien
- - damien.corset@etu.sorbonne-universite.fr
-
COUEDEL Romane
- - romane.couedel@etu.sorbonne-universite.fr
-
Date de début : 08/02/2024 - Date de fin : 02/05/2024
Contexte
Introduction
CeLe projet nousRobot offreÉcrivain unea opportunitépour concrèteobjectif de mettre en pratique et développer nos connaissances et compétences en robotique. Etudiants en troisième année à l'Université Sorbonne, nous allons concevoir et construire un système robotique complet qui sera capable de dessiner sur une feuille.
Objectifs
plane L’objectifhorizontale. principalEn estcombinant les domaines de concevoir et réaliser un système robotique fonctionnel, qui comprendra sa partiela mécanique, sade motorisation, sa commandel'électronique et son interface de pilotage.la Leprogrammation, notre équipe s'engage à relever ce défi. Pour ce faire, nous devons respecter un cahier des charges fourniprécis préciseet utiliser les fonctionsmachines quedisponibles doitau réaliser le systèmeFABLAB, ainsi quequ'une lesliste contraintesde auxquellesmatériel ilprédéfini. doitCe répondre.projet représente une opportunité d'apprentissage, nous permettant de développer nos compétences en collaboration d'équipe et en utilisant des technologies avancées comme la découpe LASER et l'impression 3D.
I. Cahier des charges:charges
Fonctions à réaliser
Le robot doit être fixé ou posé sur une plaque horizontale carrée de 250mm par 250mm. Il doit être capable de réaliser deux exercices :
- 1
2) Tracer, avec l’aide d’un crayon fixé sur l’organe terminal du robot,dans le plan de la plaque support, avec un crayon fixé sur son organe terminal. Chaque figure doit être réalisée en 10 secondes, avec une marge d'erreur de +/- 0,2 secondes. Les figures imposées sont les suivantes :-
Une ligne de 5cm de long,
-
Une ligne pointillée de 5cm de long,
-
Un cercle de 2.5cm de rayon,
-
Un cercle pointillé de 2.5cm de rayon.
Exercice 2Le robot doit être capable de tracer un dessin
imposédans un carré de5cmdimensions 5 cm par5cm.5 cm, avec un crayon fixé sur son organe terminal. Le déplacement del’organecelui-citerminal du robot devradoit êtrepilotécontrôlé par unjoystick.joystick. Il estpossibleimportant de noter que la figuresoità tracer peut être discontinue,etcedoncqui signifie qu'il faut prévoir la possibilité depouvoirrelever le crayon du support horizontalsurpendantlequelleontracé.De plus, une fonctionnalité facultative consiste à offrir la possibilité de régler la vitesse de déplacement du robot via l'interface utilisateur. Cela permettrait d'ajuster la vitesse de tracé en fonction des besoins spécifiques de chaque dessin.
Fonctions contraintes
Les contraintes imposées pour le projet Robot Écrivain sont:
-
Respect des règles d’utilisation du FABLAB de Sorbonne Université
-
Utilisation de composants (moteurs, contrôleurs, boutons, é
crit.léments de guidage, alimentation stabilisée, boutons, etc.) parmi un ensemble imposé. -
Fabrication des pièces grâce au Machine à découpe LASER et Imprimantes RAISE 3D PRO2.
-
Programmation en C utilisant la chaîne de développement Arduino IDE.
II.MatéListe des composants et matériels:disponibles-
Un crayon
-
Interface de commande :
-
Une carte
Arduinoarduino UNO avec câble USB-B; -
Un joystick:
-
Une platine de prototypage;
-
Alimentation régulée 5V ;
-
Câbles, LEDs, boutons poussoirs, résistances.
-
Motorisation :
-
Deux servomoteurs HS422 180°;
-
Un servomoteur Emax ES08A 180°.
Mécanique :
-
Matière PLA pour impression 3D;
-
Feuilles medium : 3mm et 6mm d'épaisseur;
-
Vis et écrous : M2, M2.5, M3, M4.
-
Roulements et axes de diamètre 4mm.
Exercice
1)Le Tracer,robot avecdoit l’aideêtre d’un crayon fixé sur l’organe terminal du robot, dans le plancapable de la plaque supporttracer différentes figures imposées de difficulté croissante :
a. Une ligne de 5cm de long,
b. Une ligne pointillée de 5cm de long,
c. Un cercle de 2.5cm de rayon,
d. Un cercle pointillé de 2.5cm de rayon.
Le tracé de chacune des figures doit être réalisé en 10 secondes +/- 0.2 secondes.
Propositions de réalisation
Proposition 1:
III. Machines utilisées:
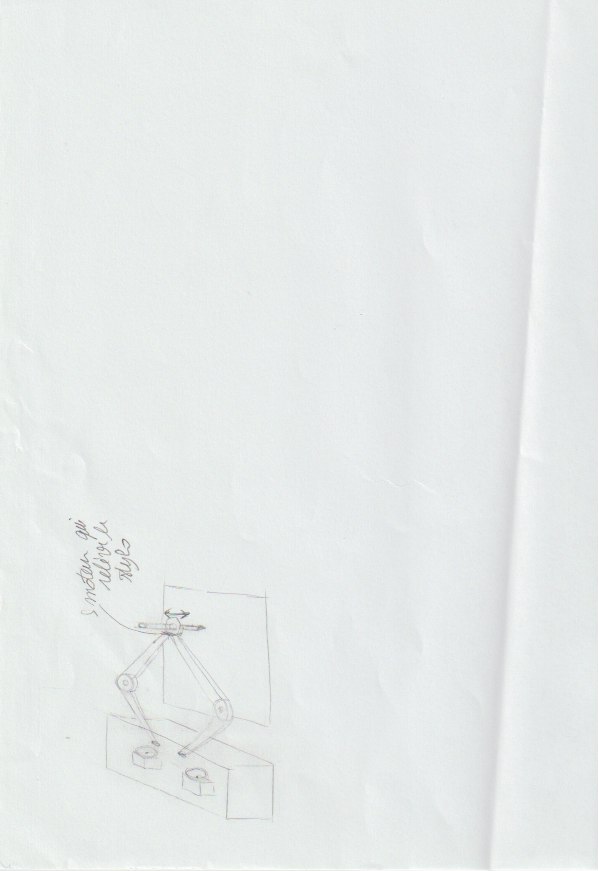
Découpecette proposition on retrouve un rail de guidage immobile fixé à deux masses, auquel est accroché avec un système de chariot un second rail qui se place perpendiculairement au précédent. Sur ce rail mobile on retrouve un chariot auquel est accroché un stylo. Ainsi si le rail mobile bouge, le stylo se déplace selon y (d’après le repère tracé sur le dessin) et si le chariot bouge, le stylo se déplace selon x. Le servo moteur servant à faire bouger le rail se trouverait sur une des deux masses et celui pour faire bouger le chariot se trouverait au bout du rail mobile.Imprimantecomme3Dla
Dans
Le servo moteur servant à relever le style se trouverait sur le chariot. Ce système est déjà commercialisé non pas pour faire du dessin mais pour de la gravure au laser (tout
Gant2). chart
https://docs.google.com/spreadsheets/d/1l3xwK5V_pOysevd3q7F5Jwf33_8ALGLU7fZH52m7O9I/edit?usp=drive_linkINCONVÉNIENT: le deplacement linéaire
SolutionsProposition proposées
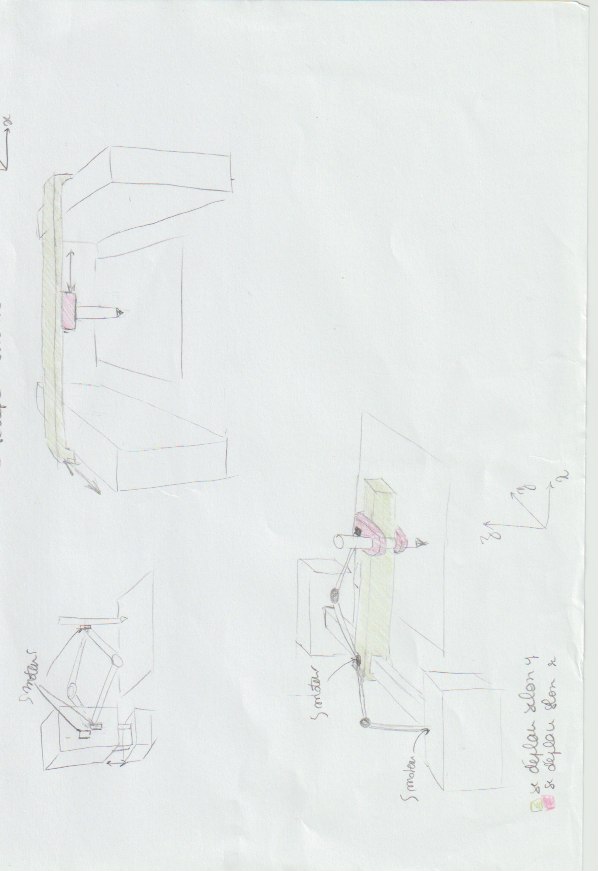
2:
A venir
Solution
Dans retenuela même idée que la proposition 1, la proposition 2 est constituée d’un chariot auquel est fixé le stylo, qui se déplace linéairement sur un rail de guidage mobile qui lui-même se déplace linéairement et repose sur deux autres rails immobiles.
APour venirles mêmes raisons que précédemment cette proposition ne sera pas notre choix final.
Proposition 3
Choix final: