Projet final : Essuie lunettes - Flora, Chanel, Manele, Anaelle
Problématique de départ:
EnNous avons observé l'inconfort des lunettes en temps humidede pluie. Des gouttes se deposent sur les lunettes troublant le champ de vision de celui ou pluvieux,celle qui les verresportent. Sans compter l'humidité qui crée une buée devant leurs yeux, rendant leur vue définitivement floue.
La vision trouble n'est d'ailleurs pas le seul problème observé. Nous comptons également les inconvénients suivants :
- Perte de
lunettestempsse:mouillentafinrapidement,derendantretrouverlaunevisionvueduappropriée, le porteurfloue.deIllunettefautdoitlesretrouversécherson chiffon spécifique aux lunettes afin de nettoyer ses verres - Dégradation de l'humeur : en
permanence,temps de pluie, le porteur de lunette doit effectuer cette action régulièrement, ce quidemandeestd'arrêtersusceptiblesondeactionl'énerver et donc desortirleunmettrechiffondespécifique.mauvaise humeur
Le projet :
CréAfin d'améliorer la qualité de vie des porteurs de lunettes, nous avons donc pour ambition de créer des essuies glaces pour lunetteslunettes, discrètes et esthétiques qui soit adaptable à l'aidetoute d'arduinopaire de lunettes. Ces essuies glaces s'activeraient automatiquement lorsqu'il pleut.
Néanmoins, les ressources à notre disposition étant limitées (Servoque moteurce soit en terme de matériaux ou de compétences), nous ne pourrons créer qu'un prototype qui pourra prouver la faisabilité du projet mais qui ne sera que peu représentatif du produit final "discret et capteur d'eau) et de découpe laser (pour le prototype)esthétique".
Le matériel et les logiciels :
Arduino :
- Arduino
- Base shield
- 3 fils
- Servo moteur
- Bibliothèque "Servo.h"
- Grove water sensor
Découpe laser:
- inkscape
- festi.info / boxes.py
mdfMDF 3mm
Déroulement du projet:
Phase de réflexion:
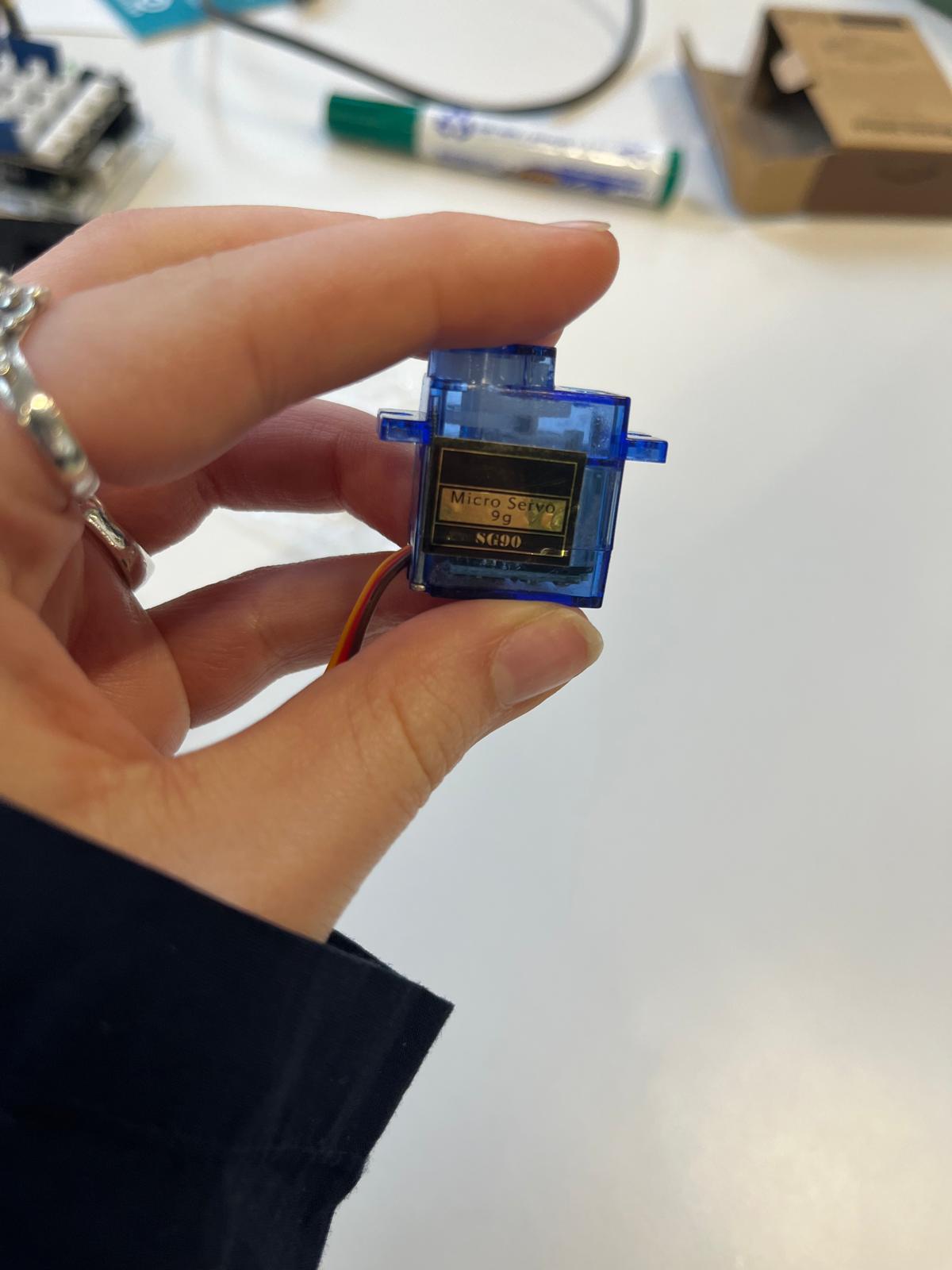
Nous avons tout de suite fait le lien entre le problème identifié et les essuies glaces des voitures. Nous étions donc confiant en ce qui concerne la proof of concept. Nous avions neanmoins la contrainte de la taille du servo moteur et du capteur dont nous avons tenu compte dans les schema si dessous. Il est donc important de preciser que ces schemas ne representent pas le produit final mais le prototype permettant de prouver la faisabilité du projet. Notre produit final serait en effet plus discret et plus esthétique.
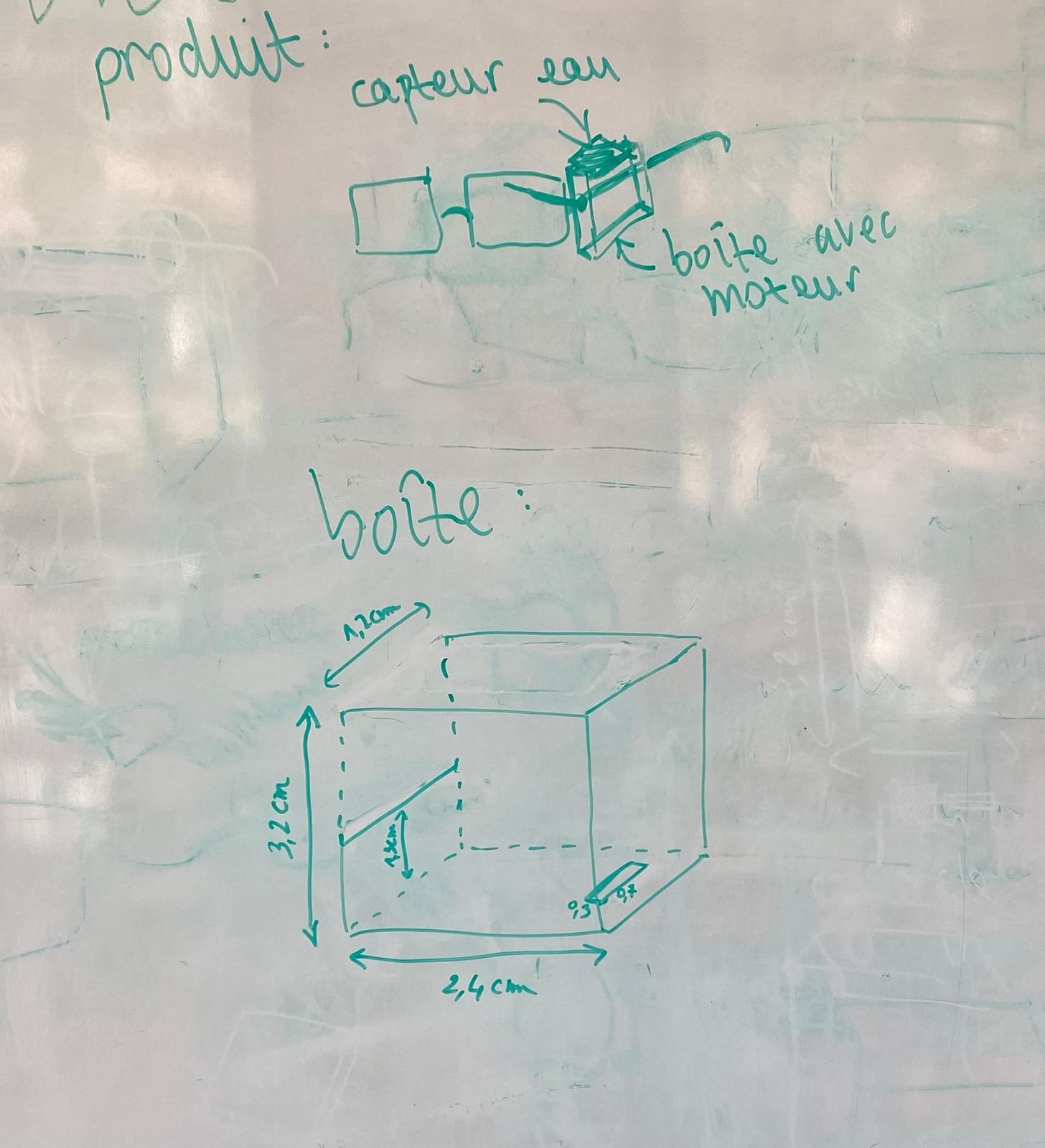
DifficultésConcernant rencontréesle design de la boite contenant le moteur, nous avons simplement pris en compte le format du servo moteur :
- Nous avons coupé un côté pour faire dépasser la partie tournante (l'hélice).
- Nous avons ajouté un trou pour laisser passer les fils connecteurs du moteur à la plaquette d'arduino.
Le plus difficile a été de trouver l'emplacement idéal pour rendre le prototype le moins désagréable a porter possible tout en faisant en sorte que l'hélice accrochée au servo arrive sur le verre.
Phase de conception:
Nous avons commencé par le dur : l'arduino.
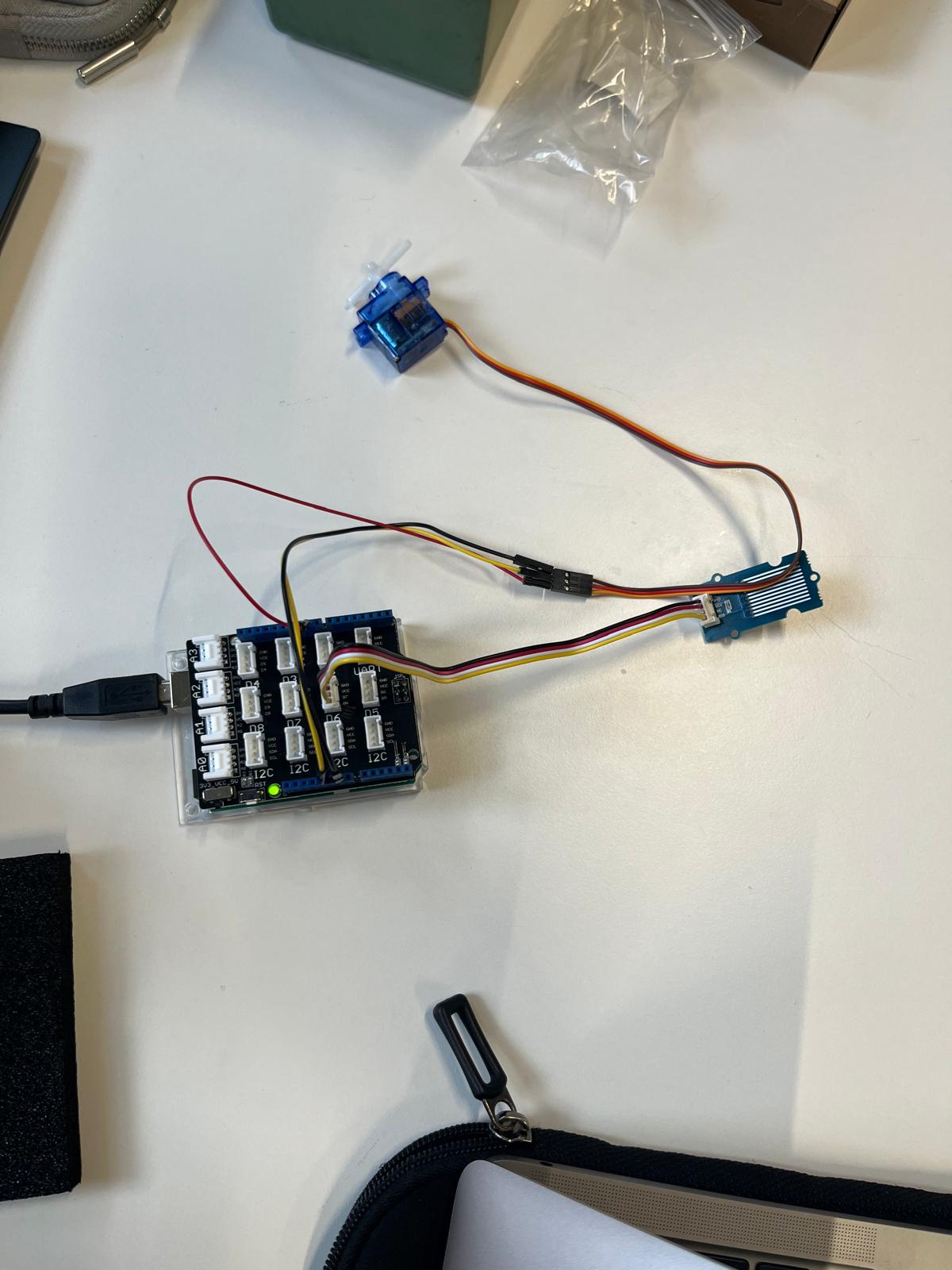
En ce qui concerne le montage :
- Nous avons posé le base shield sur l'arduino
- Nous avons connecté le capteur à la base shield
- Nous avons connecté le servo moteur à la base shield
Ensuite, le code :
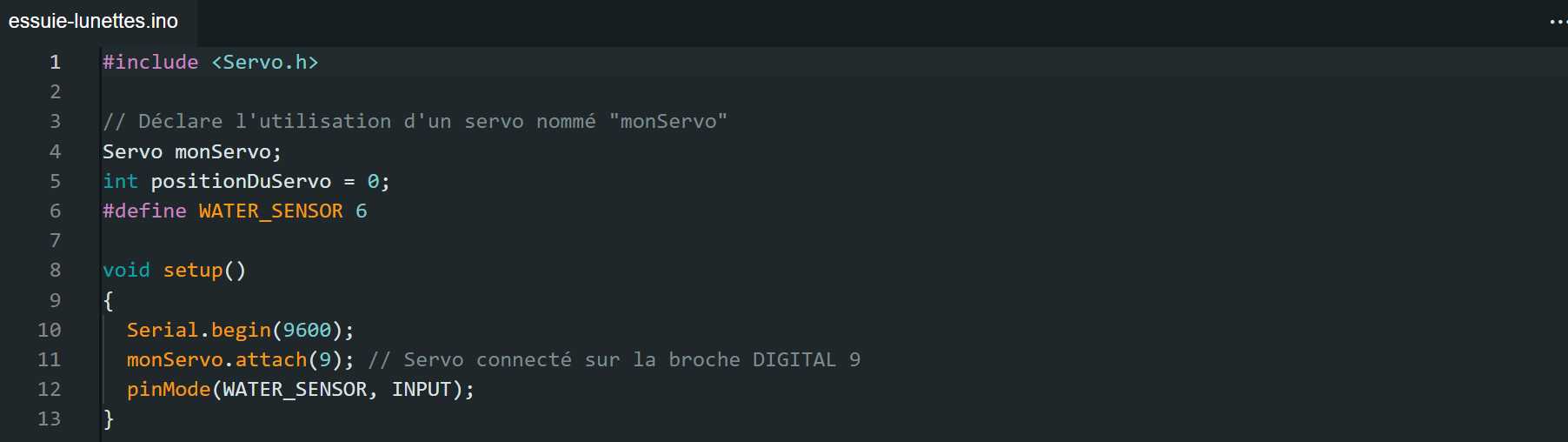
Après avoir défini :
- Le Servo ("monServo')
- L'angle actuel de monServo comme l'angle initial ("0")
- La vitesse de monServo ("Serial.begin(9600)")
- Le capteur d'eau ("WATER_SENSOR")
- Le capteur d'eau en tant qu'INPUT
Nous procédons à la boucle ("loop") qui va permettre de faire tourner l'hélice à un certain angle lorsque le capteur détecte de l'eau :
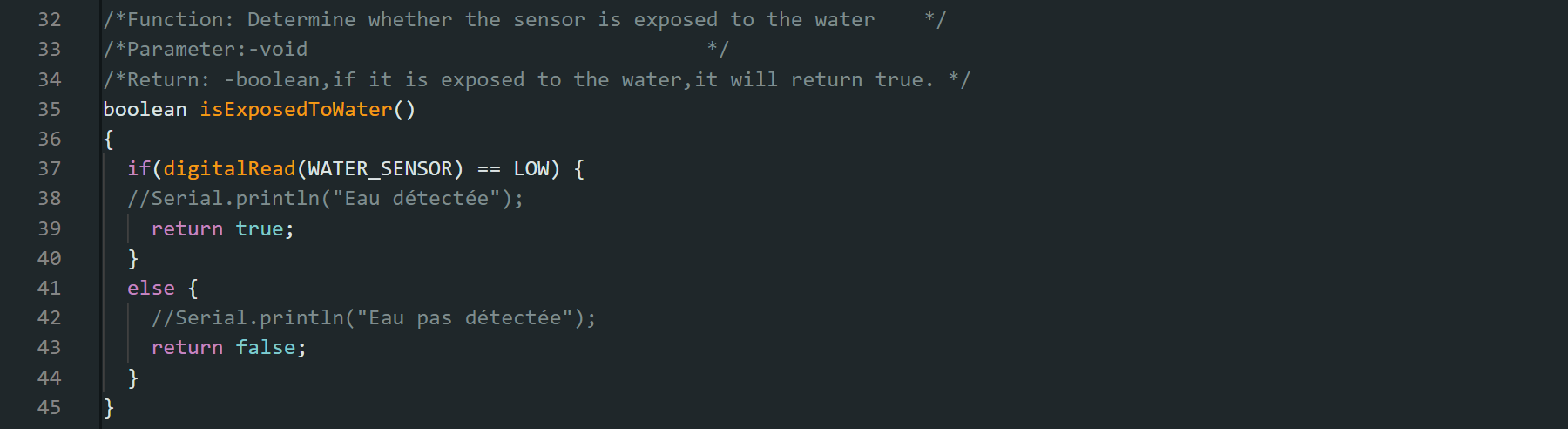
1. On crée une fonction booléenne isExposedToWater() qui renvoie "true" si lorsque le capteur détecte de l'eau soit lorsque DigitalRead(WATER_SENSOR) == HIGH et false sinon.
-
- Difficulté rencontrée : le code ne fonctionne correctement que si on écrit DigitalRead(WATER_SENSOR) == LOW pour une raison qui nous échappe
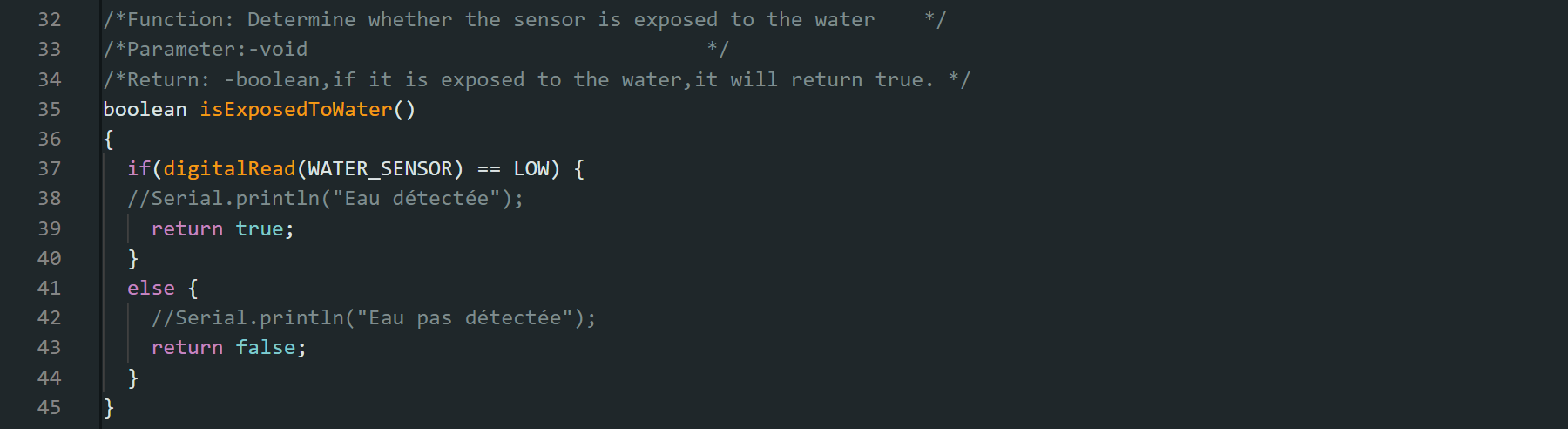
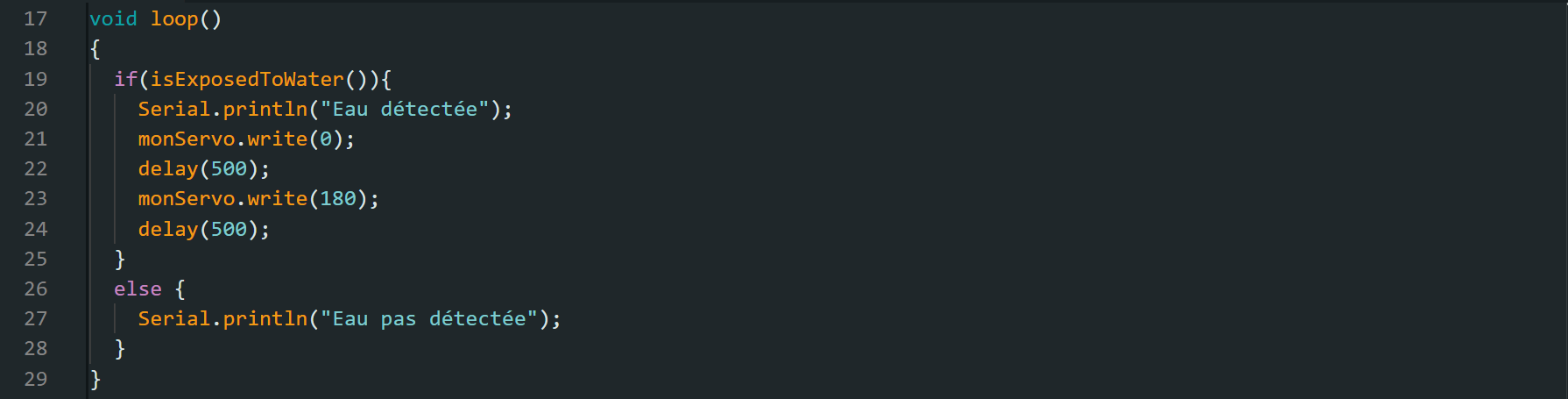
2. L'hélice s'active si l'eau est détectée, donc nous commençons par mettre la condition "if(isExposedToWater())".
3. Si la condition est respectée, alors l'hélice passe de son angle initial 0 à un angle de 180° (monServo.write(180)) et l'action se fait avec un délai de 500 ms.
L'étape suivante consiste à réaliser le support permettant d'accrocher le dispositif aux lunettes. Nous avons choisi de réaliser une boîte sur Inkscape via Boxes.py dont les dimensions correspondent exactement au servo moteur (et ainsi éviter que le servo moteur soit mobile dans la boîte).
Nous rentrons les mesures du servo moteur sur le site Boxes.py en y ajoutant les 3 mm du matériau MDF + 1,5 mm de marge de sécurité. Nous obtenons les tous les côtés de notre boîte.
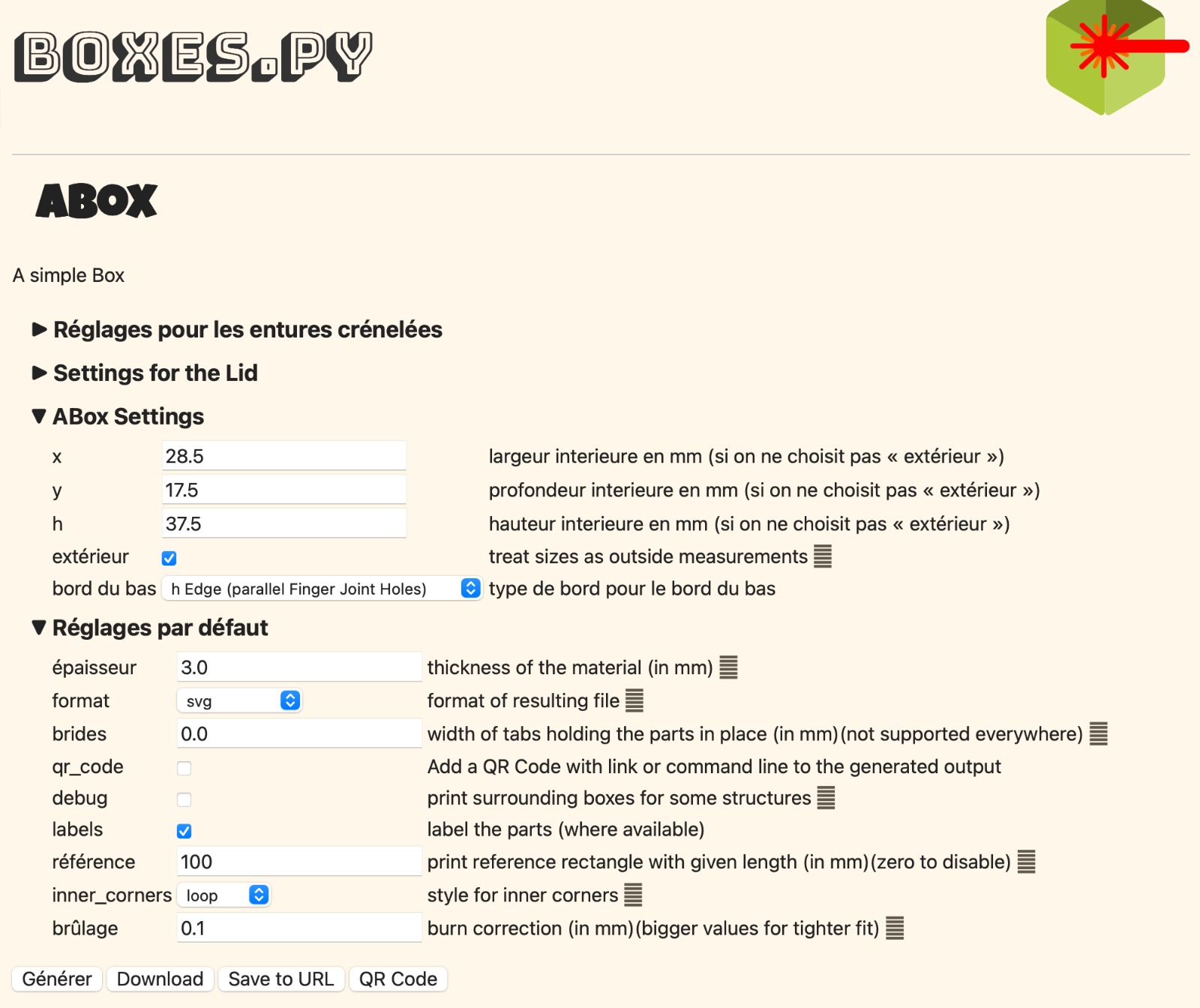
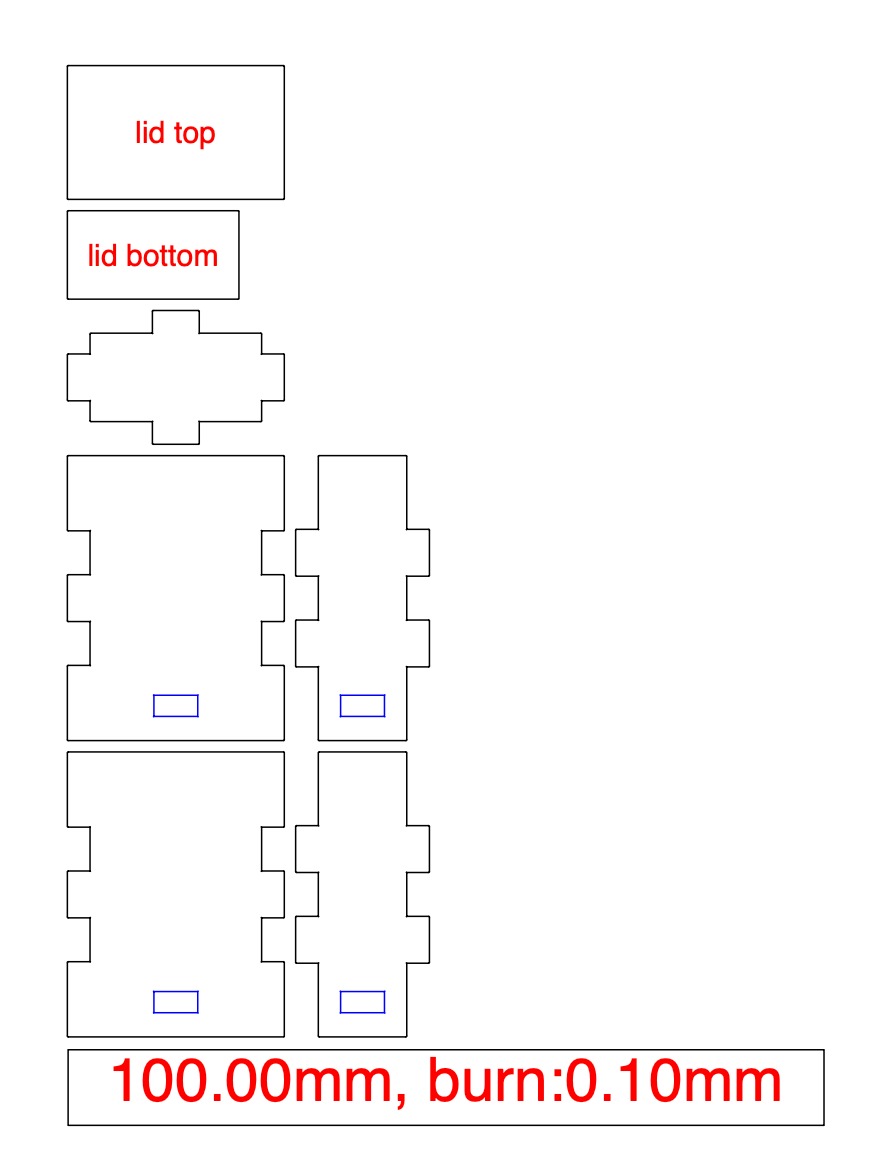
Nous basculons ensuite à Inkscape pour faire les modifications nécessaires :
- Couper le Wall 3 pour faire dépasser la partie tournante du moteur.
- Ajouter un trou sur le bottom pour laisser passer les fils connecteurs du moteur à la plaquette d'arduino.
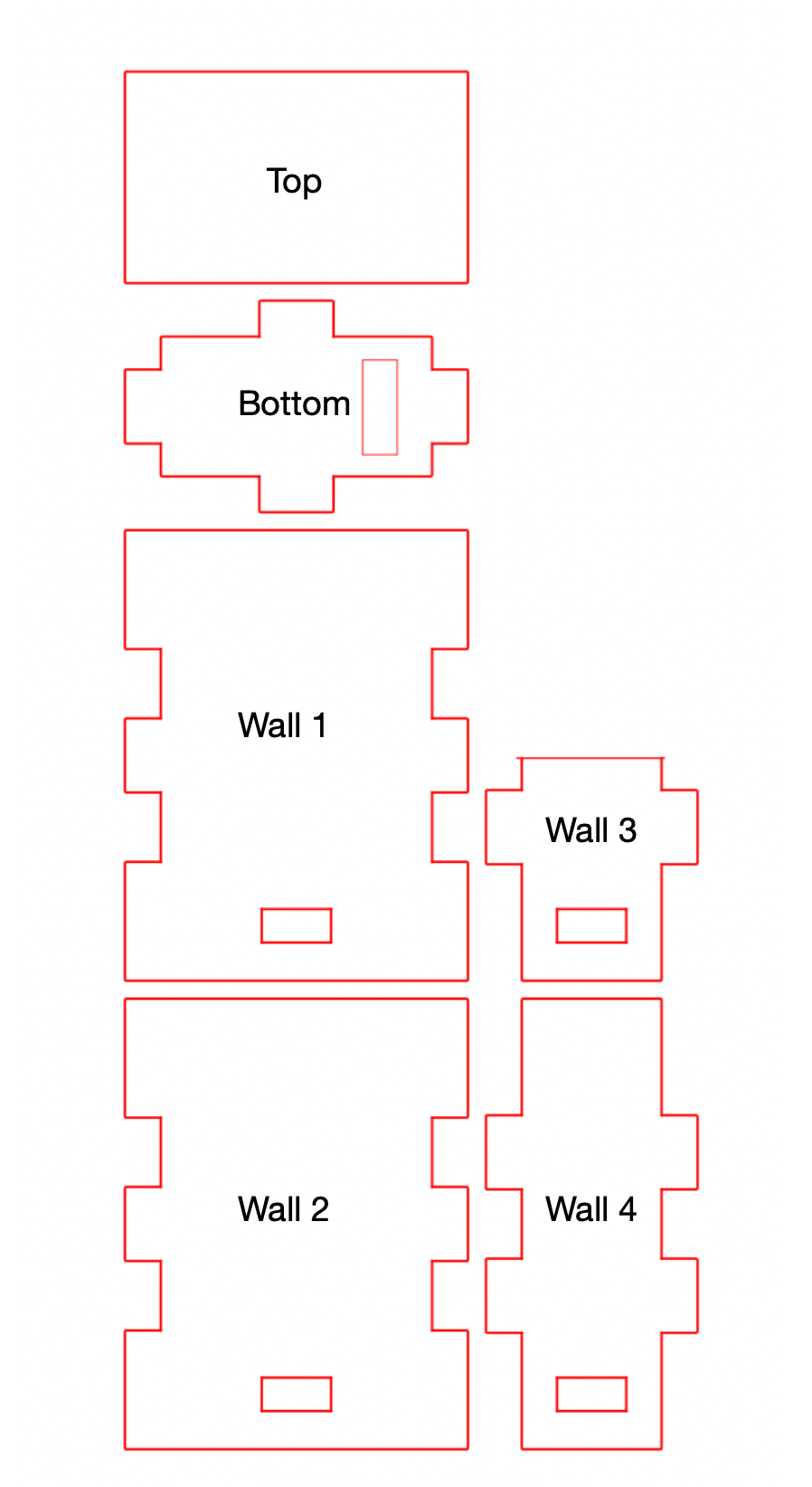
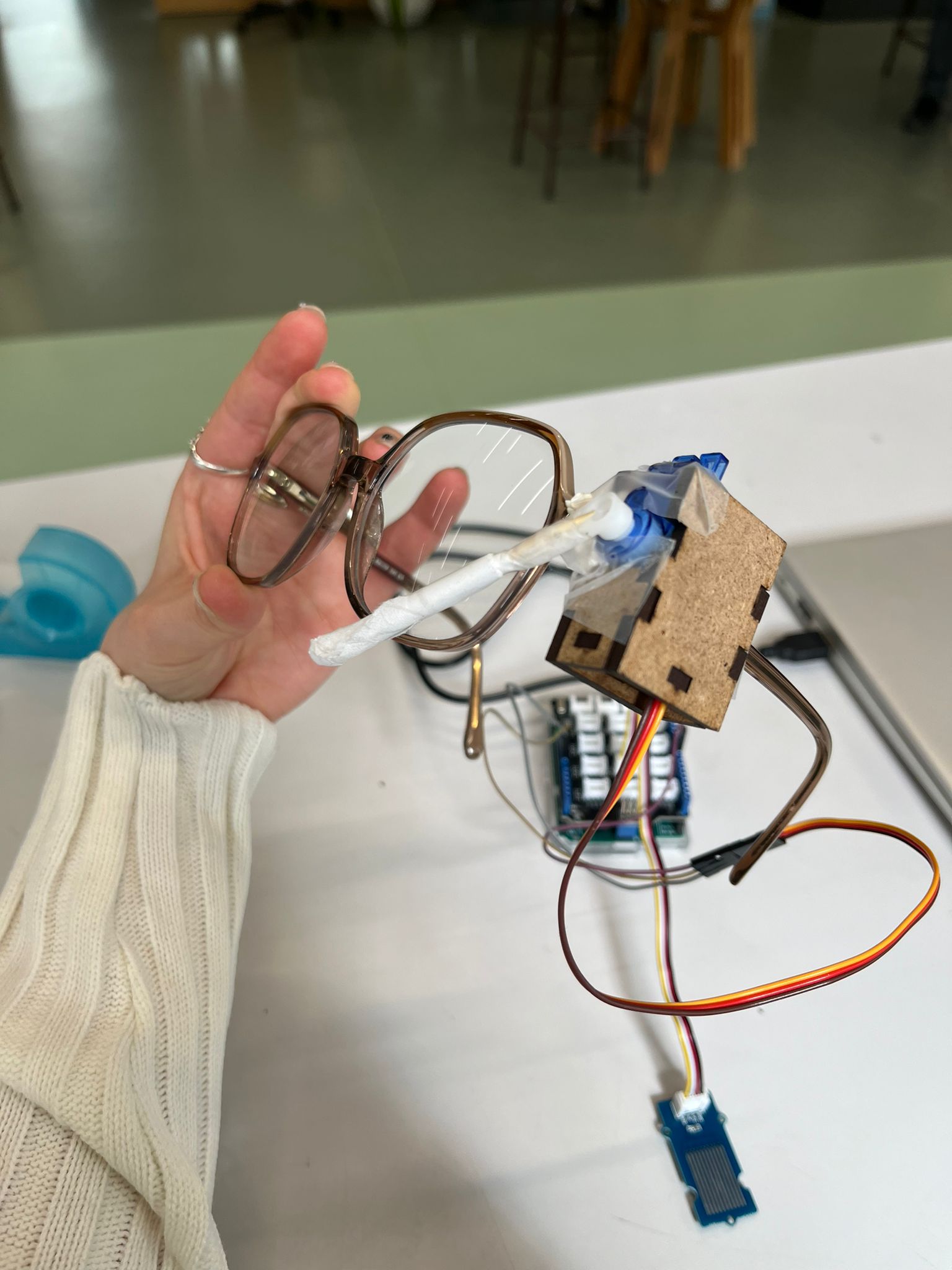
Nous réalisons la boîte au découpe laser et assemblons tous les côtés. (Ci-dessous vue côté Wall 3, vue côté Wall 2 et vue du dessus)

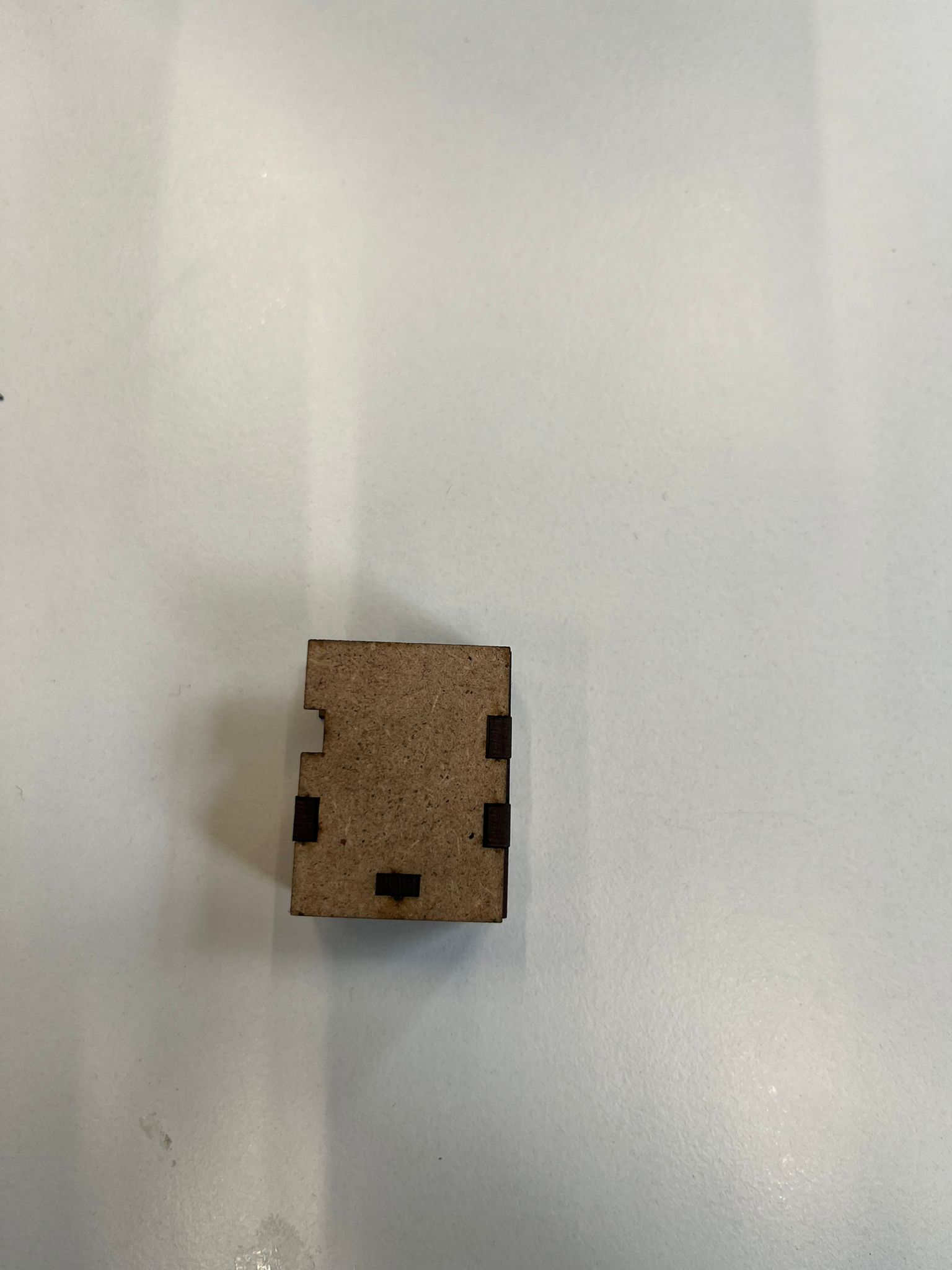
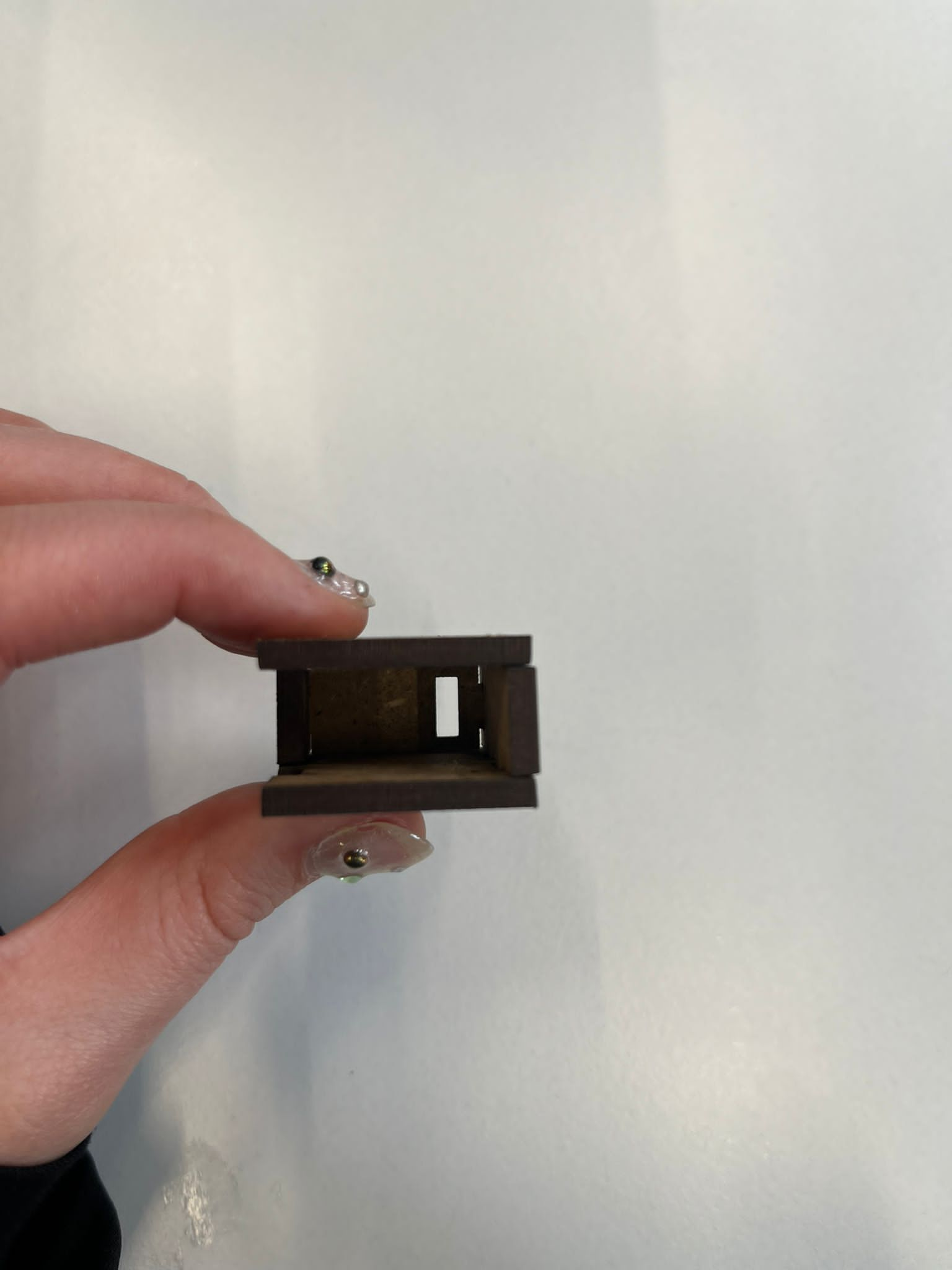
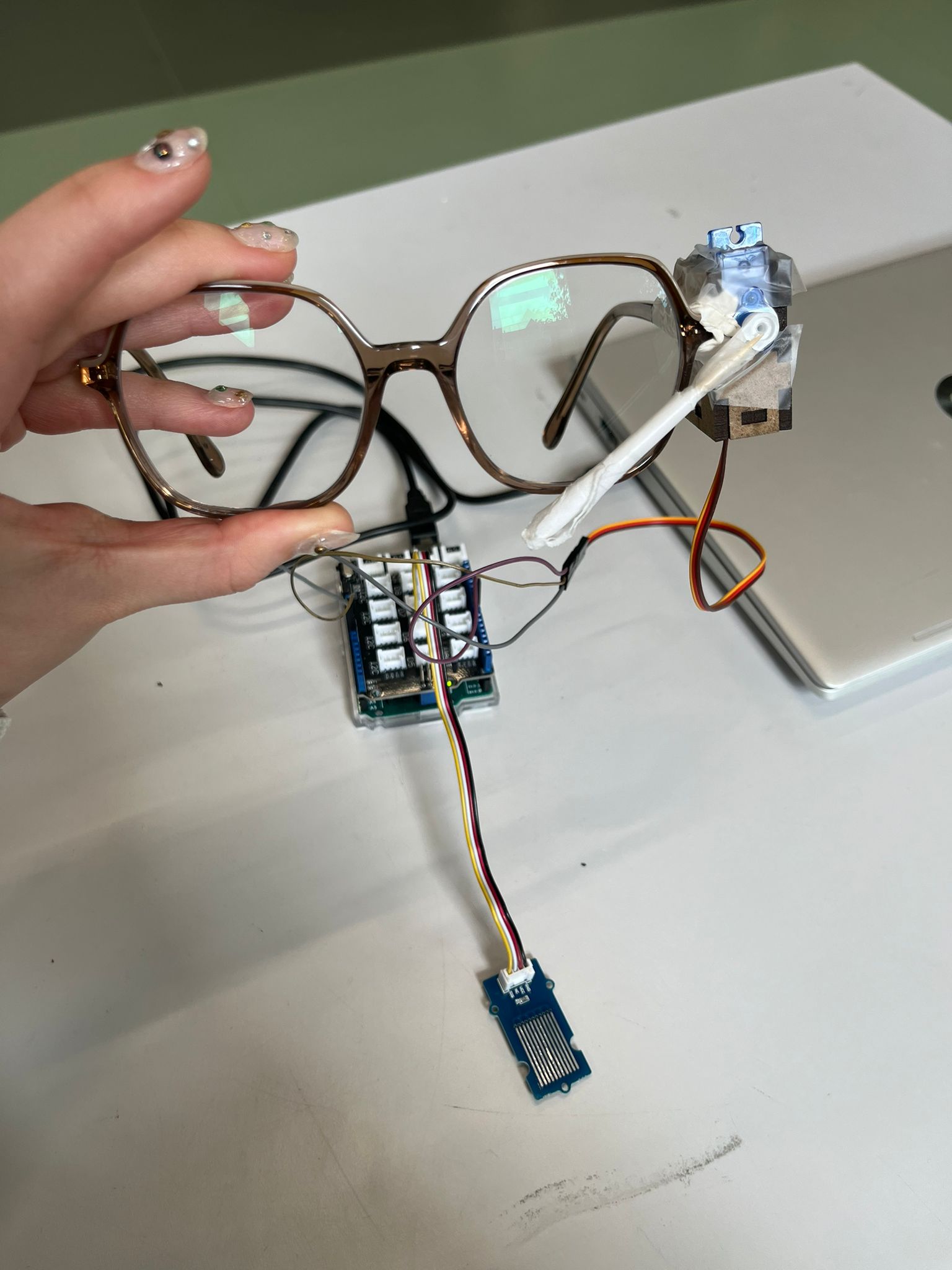
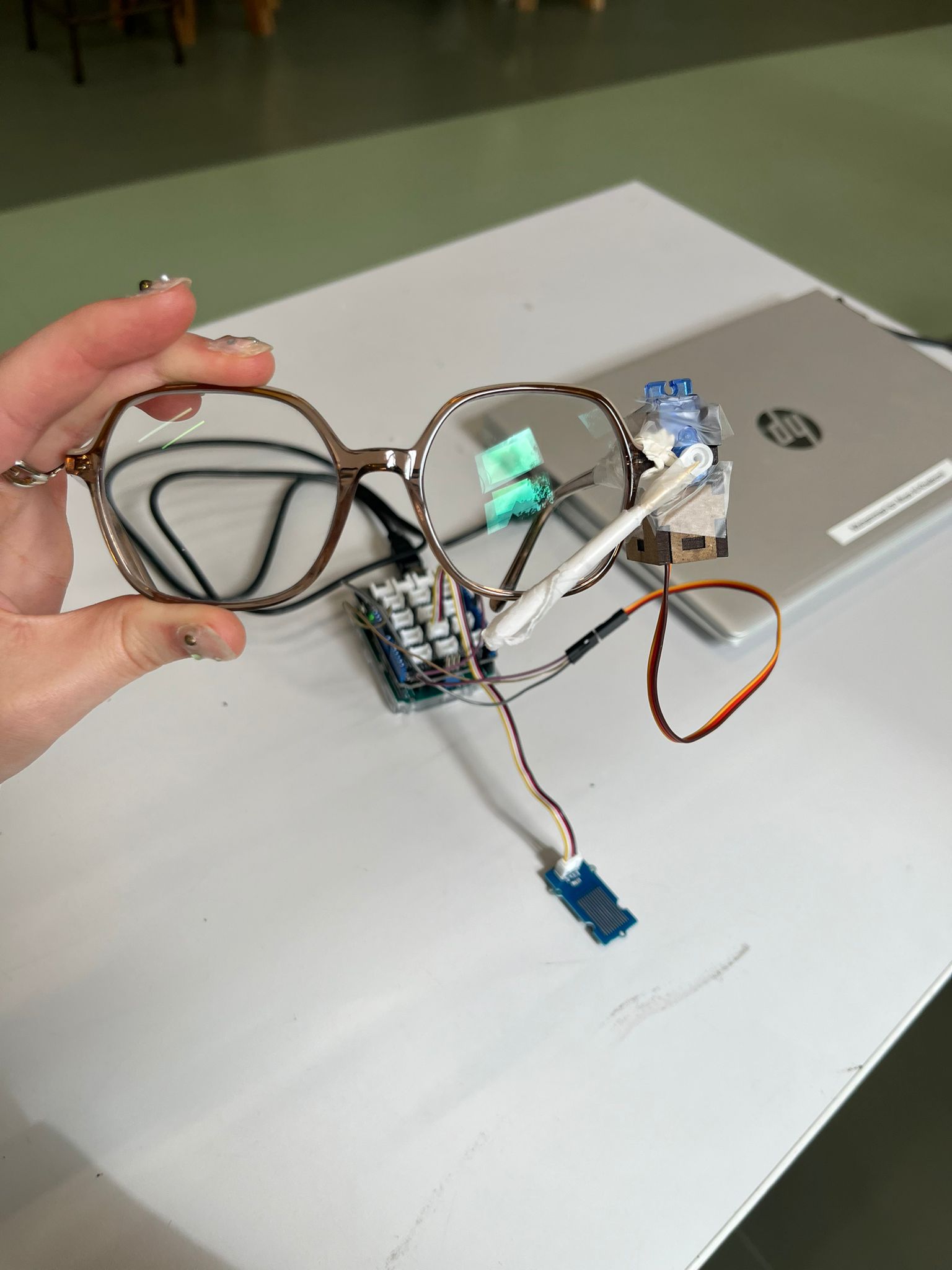
Ci-dessous résultat avec le moteur dans la boîte :



Prototype final :