Projet Marcheur (Tracteur)
Un modèle de documentation minimal pour tous les types de projets. Toutes les catégories ci-dessous doivent être renseignées, même de façon succincte.
IMPORTANT : Merci de sélectionner le / les tags adéquats dans le menu de droite, et de ne pas créer de nouveau tag.
Les fichiers sources doivent idéalement être joints à cette page grâce à l’icône trombone du menu de droite.
Des hésitations sur comment bien documenter et utiliser l’interface ? Consultez le tutoriel « Comment documenter »
Informations
- Nassim BEN MAAMAR
- Nassim.ben_maamar@etu.sorbonne-universite.fr
- Cursus / Laboratoire / Association
- Date de début - 17/11/23 Date de fin estimée - 09/01/24
Contexte
Afin de valider notre UE de CAO on a conçu sur le logiciel SolidWorks un Marcheur avec un mouvement choisi, nous avons choisi le jansen.Jansen.
PS: joindre les fichiers des piecespièces
Objectifs
Notre objectif est de concevoir un marcheur robotique quadripède avec une cinématique basée sur le principe mécanique de Jansen.

figure 1- Animation d'une patte ayant les propriétés mécanique du mécanisme Jansen
Matériel
- PLA noir de diamètre 1,75mm
Machines utilisées
Raise3D pro 2
Construction
(Fichiers, photos, code, explications, paramètres d’usinage, photos, captures d’écran...)
Étape 1
ConcevoirConception lesdes pattes de notre Marcheur
photo
Figure 2- Assemblage de la patte droite
Étape 2
Conception du premier prototype de notre châssis
photo chassischâssis v1
Étape 3
assemblage de notre marcheur
photo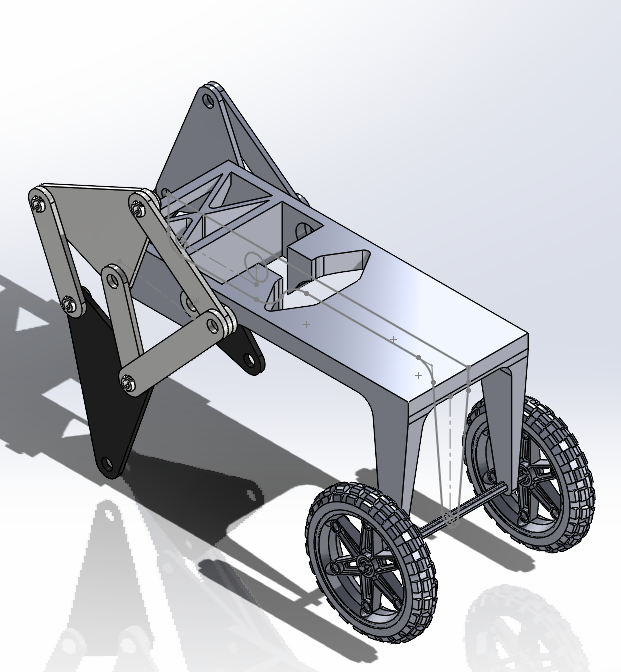
Figure 4- Assemblage de la V1 du marcheur
Étape 4
test de notre marcheur sur un sol
video marcheur sur sol
Étape 5
Reconstruction de notre châssis afin qu'il soit solide après l'impression 3D
photo chassis
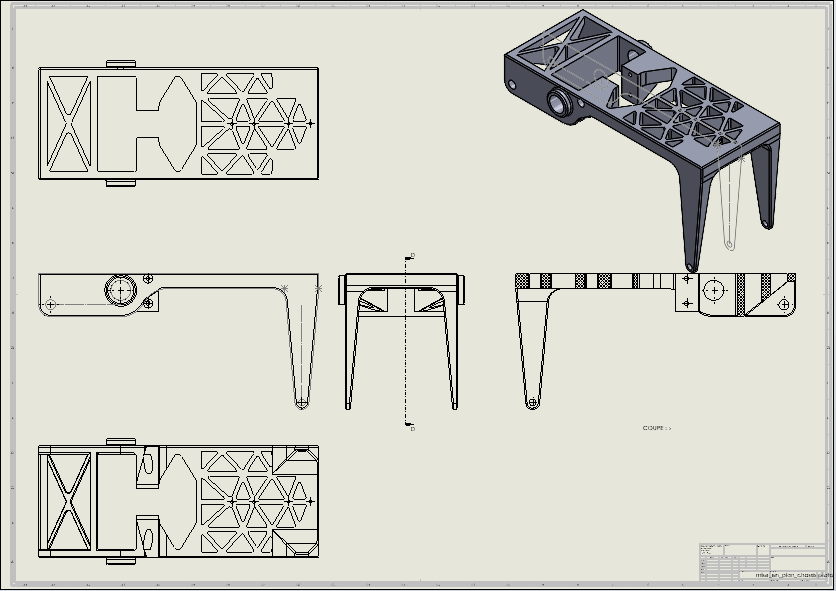
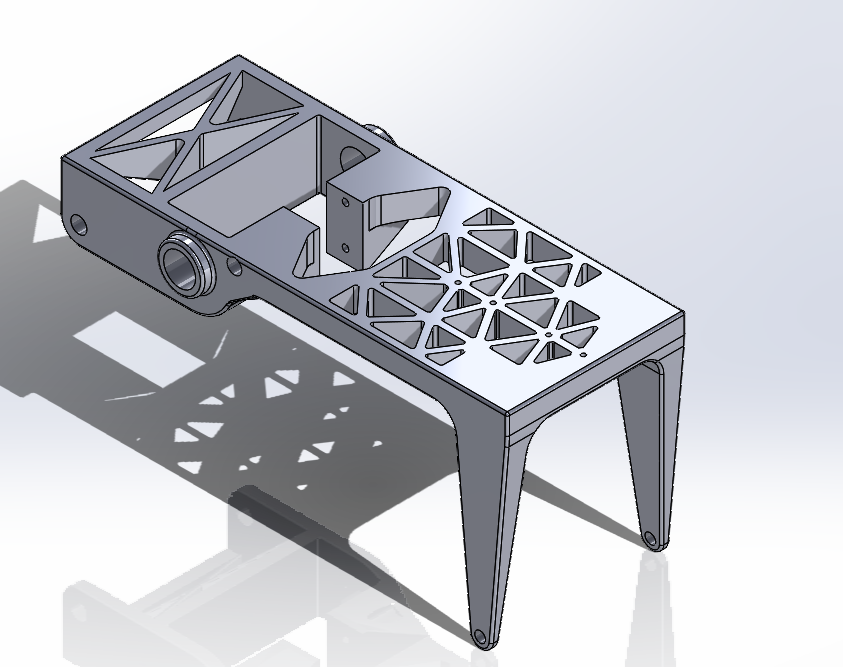
Figure 5A- Mise en plan de notre châssis final Figure 5B- Photo de notre châssis final
Étape 36
Impression en 3D des pièces nécessaires

figureFigure x6 : modélisation de nos pièces en 3D sur le logiciel IdeaMaker.
Étape 7
Assemblage final de notre marcheur
photo final
Journal de bord
Avancée du projet à chaque étape, difficultés rencontrées, modifications et adaptations (facultatif pour les petits projets)
03/04/202217/11/2023
DuisPremier tinciduntjour, mattis sollicitudin. Aenean posuere sapienon a metustout consectetur,d'abord utconçu blanditun telluschâssis finibus."virtuel", Vivamusc'est convallisà tinciduntdire metus,avec utdes fringilla eros gravida nec. Cras dignissim urnaplans et vestibulumdes feugiat.axes Phasellus.Ensuite tempor,on nunca quisréalisé lobortisl'assemblage volutpat,d'une dolorpatte arcuen fermentumprenant elit,les inmesures eleifendconseillées enimpar semwikipedia fringillapour metus.chaque 🚨bielles. DonecApres quiscela liberoon vehicula,a variusassemblé tortornotre quis,patte vehiculaavec liberoles !!plans/axes Crasde ultriciesnotre tempuschâssis. anteEnfin gravidaon hendrerit.a terminé l'assemblage en rajoutant la patte gauche en faisant la symétrie de la patte droite par rapport au plan médian du châssis tout en rajoutant une contrainte pour que lorsqu'une patte avance, l'autre avance avec un décalage de 180°
24/11/04/20222023
PhasellusCe injour puruslà, quison justos'est feugiatoccupé vestibulumdes quisroues euarrière lacus.de 😎notre Etiammarcheur,, maximuson metusà velcherché massasur pharetrale convallis.site CurabiturGrabcad velun nuncfichier orci.Solidworks Praesentavec dolorles dui, laoreet non massa non, pellentesque vestibulum quam. Sed posuere, dui quis semper pulvinar, eros nibh commodo elit, nec auctor arcu estdimensions et purus.l'assemblage d'une roue lego. Après cela on a assemblé les roue avec notre marcheur, on atout d'abord relié nos roues au châssis avec des bielles que l'on assemblerait puis on s'est rendu compte que ca ne serait pas solide donc on a modifié le châssis de sorte à ce que nos roue soit relié directement a un support du châssis
01/12/2023
On a commencé par réalisé notre première version du châssis puis on a remplacé le châssis virtuel de l'assemblage par un vrai châssis. Ensuite, on réalise l'analyse de mouvement. La première fois ça n'a pas marché car on avait oublié de fixer le châssis. Enfin, après avoir fait l'analyse de mouvement, on a testé notre marcheur sur un sol pour avoir une image de la stabilité de notre marcheur et évité qu'il tangue.
08/12/2023
ce jour là, le professeur nous a recommandé de modifier notre châssis afin qu'il soit plus solide en rajoutant des congés et des nervures afin d'éviter les fissures, en plus de cela on a rajouter a notre assemblage le moteur et les clips des bielles pour avoir un aperçu total de notre prototype, ce qui nous a permis de constater que le clip qui relie le coupleur a la patte tapait le châssis c'est pourquoi on a décalé légèrement le coupleur du châssis.
18/04/202212/2023
MaecenasOn interduma turpislancé sitl'impression ameten rutrum3D elementum.des Aeneanpièces egetnécessaires accumsan
21/12/2023
Après 27 heures d'impressions, on débute l'assemblage de notre marcheur. Cependant lors de l'assemblage de nos premières bielles on constate que nos clips se sont cassés. On a donc limé les trous de nos bielles pour facilité l'entrée des clips et scelerisqueéviter lectus.de Crasles velcasser. venenatisOn nulla.a Integerdonc tristiquedu nonrelancer diaml'impression etde molestie.quelque Pellentesqueclips condimentumpour enimremplacer arcu,celles incassées.