Projet ROB (Amel, Clarence, Adrien)
Conception préliminaire : Réalisation d'un système robotisé "Robot écrivain"
Informations
- Prénom et nom
-
- Amel HADDADI
- Clarence
- Adrien
-
- Adresse mail
- Cursus
-
- 1ere année cycle ingénieur en Robotique à Polytech Sorbonne
-
- Date de début - Date de fin estimée (ou réelle)
-
- 07/02/2024 jusqu'au
-
Contexte
Ce projet est le sujet de notre UE Robotique.
Objectifs
- L'objectif de ce projet est de réaliser un système robotisé : sa partie mécanique, son actionnement, sa commande et son interface de pilotage. Ce système doit être dessinateur puisqu'il doit répondre à deux exercices :
- Le premier consiste à tracer différentes figures prédéfinies dans un carré de 5cmx5cm en 10 secondes : Une ligne droite de 5cm, une ligne pointillée de 5cm, un cercle de rayon 2,5cm et un cercle pointillé de 2,5cm.
- Le deuxième consiste à reproduire un dessin imposé (inconnu) à l'aide d'un joystick dans un carré de 5cmx5cm.
2.L'objectif pour chacun d'entre nous est de réussir à bien s'organiser au sein de l'équipe, la gestion du temps et apprendre les bases de la gestion projet dans le but de parvenir à concevoir un mécanisme robotisé fonctionnel.
Cahier des charges
Le but est de concevoir un robot capable de dessiner sur un support plan horizontal :
a. Une ligne de 5cm de long.
b. Une ligne pointillée de 5cm de long.
c. Un cercle de 2.5cm de rayon.
d. Un cercle pointillé de 2.5cm de rayon.
e. Un dessin imposé (Le déplacement de l'organe terminal devra être piloté par un joystick)
Une fonction supplémentaire : Être capable de modifier la vitesse de déplacement du robot via l’interface.
Contraintes
Plusieurs contraintes nous ont été imposées dans la réalisation de ce projet , on les énumère ci-dessous :
- Les dessins imposés : Ligne, cercle en continu et en discontinus.
- Le temps fixé pour le dessin : 10 secondes.
- Utilisation de composants (moteurs, contrôleurs, boutons, éléments de guidage, alimentation stabilisée, boutons, etc.) parmi un ensemble imposé.
- Programmation en C utilisant la chaîne de développement Arduino IDE.
- Interface de pilotage: Joystick.
- Contrainte sur les machines du fablab (Machine à découpe LASER, Imprimantes RAISE 3D PRO2) qui ne sont pas toutes accessibles tout le temps ni en même temps.
Matériel
Pour accomplir ce projet, nous disposons d'une liste de composants et de matériels disponibles :
- Un crayon
- Interface de commande :
- Une carte arduino UNO avec câble USB-B;
- Un joystick:
- Une platine de protoypage;
- Alimentation régulée 5V ;
- Câbles, LEDs, boutons poussoirs, résistances.
- Motorisation :
- Deux servomoteurs HS422 180°;
- Un servomoteur Emax ES08A 180°.
- Mécanique :
- Matière PLA pour impression 3D;
- Feuilles medium : 3mm et 6mm d'épaisseur;
- Vis et écrous : M2, M2.5, M3, M4.
- Roulements et axes de diamètre 4mm
Machines utilisées
Afin de réaliser ce projet, nous disposons des machines du fablab permettant la fabrication des pièces à savoir :
- Machine à découpe LASER.
- Imprimantes RAISE 3D PRO2.
Diagramme de Gantt
Afin d'organiser au mieux nos séances de travail, et pour que l'équipe soit productif vis à vis de notre projet, nous avons réalisé un diagramme de Gantt, qui sera un outil de répartition des tâches et un calendrier prévisionnel . (En attachement le diagramme de Gantt)
Propositions de réalisation
Afin de réaliser ce projet, et répondre au cahier des charges, nous avons essayé de discuter plusieurs solutions et propositions avant de choisir la plus adéquate et la plus convenable.
Parmi les solutions que nous avons proposées, on y trouve :
- Système 2P : Un système sur deux rails permettant la translation en x et en y d'un support pour le stylo.
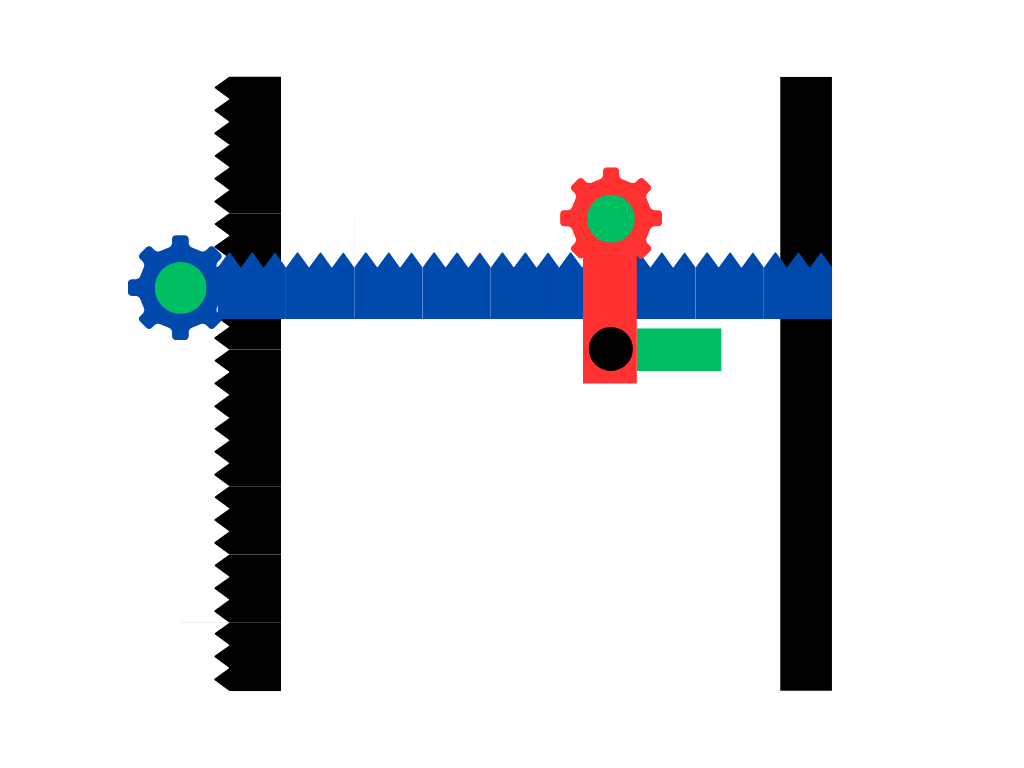
Points forts :
- Résolution du modèle géométrique inverse en utilisant la convention "Danevit-Hartenberg" .
- Pièces compatibles avec le procédé découpe laser (Gain temps).
Point faibles :
- Complexité de la planification des trajectoires complexes.
2. Système 2R : Un système comportant deux axes sur lesquels il peut tourner.
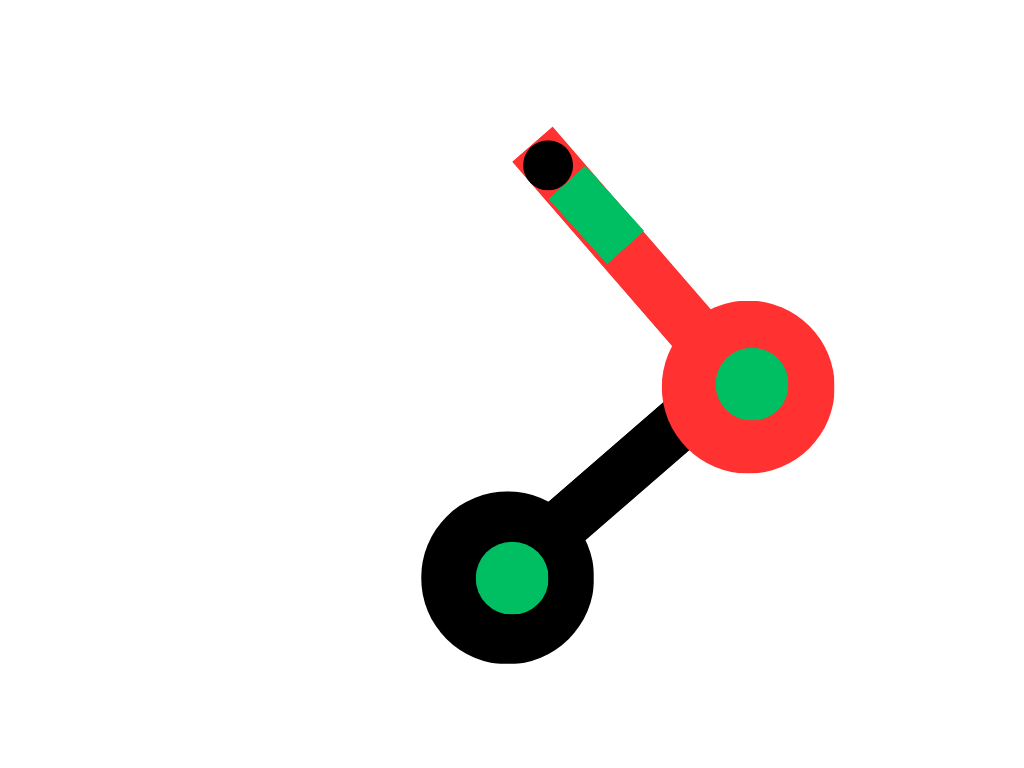
Points forts :
- Résolution du modèle géométrique inverse en utilisant la convention "Danevit-Hartenberg" .
Points faibles :
- Vulnérabilité et problème de flexion.
3. Système à structure parallèle : Système à deux bras en parallèle se rejoignant au niveau de l'effecteur (stylo).
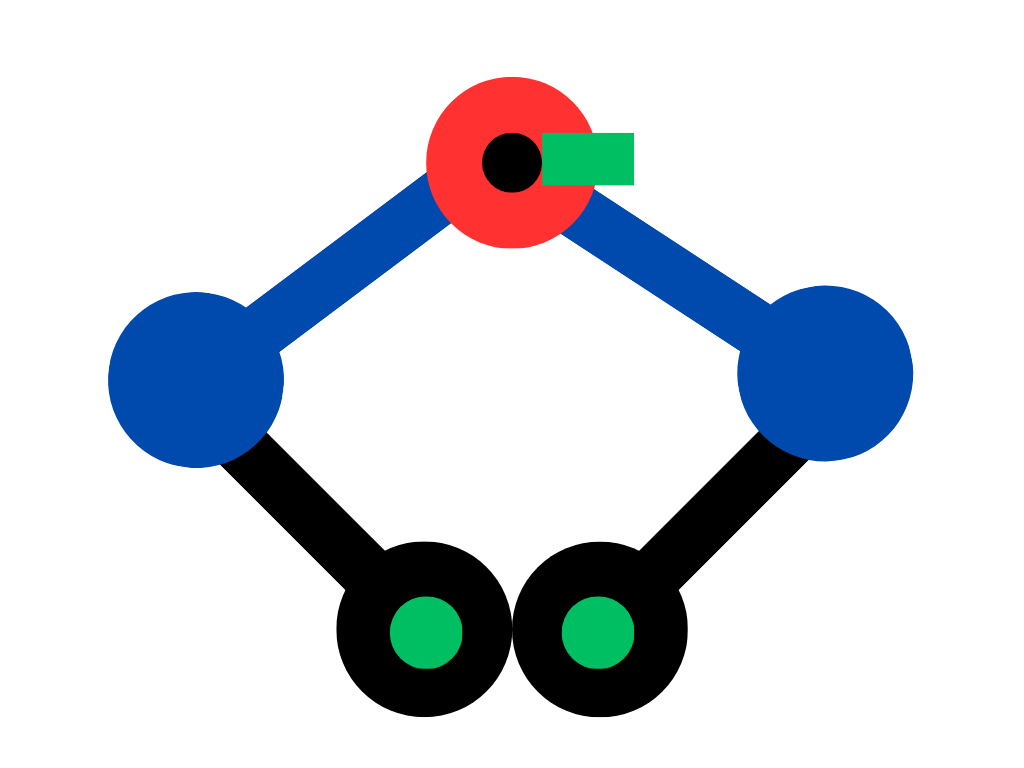
Points forts :
- Structure légère, pas de problème de flexion.
- Résistance aux vibrations.
- Réduction de l'inertie.
Points faibles :
- Difficulté de la cinématique inverse : pour ce système on ne peut pas appliquer la convention de "Danevit-Hartenberg".
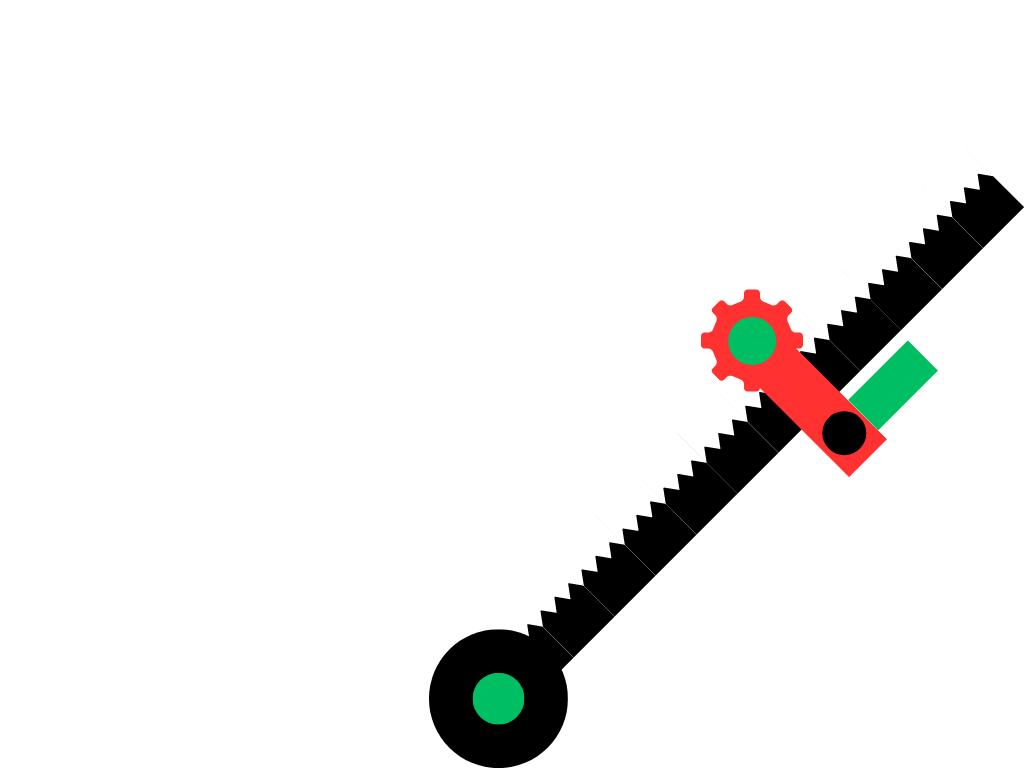
4. Système à une rotation et une translation (RP)
Solution choisie
Après réflexion, nous avons choisi la solution du système à structure parallèle car c'est une solution qui permet d'avoir trois degrés de liberté contrairement aux deux autres propositions n'ayant que deux degrés de liberté

Calculs préliminaires
Construction
(Fichiers, photos, code, explications, paramètres d'usinage, photos, captures d'écran...)