Projet ROB de Arnold, Evinia, Mathis
Arnold AÏM; Evinia ANASTASOPOULOU; Mathis RENARD.
1. Présentation du Projet
L'objectif de se projet est de réaliser un petit mécanisme robotisé permettant de dessiner des formes géométriques simples définies à l'avance ou à l'aide d'un joystick manipulé par l'utilisateur en temps réel en utilisant des mécanismes prédéfinis.
Nous respecteronsrespectons le cahier des charges définiesfini par notre enseignement Guillaume MOREL ci-dessous
2. Cahier des charges
Le butmais général est de faire un robot capable de dessiner avec un crayon sur un support plan horizontal.
2.1 Fonctions à réaliser
Le robot doit être fixé ou posé sur une plaque horizontale carrée de 250mm par 250mm. Il doit être capable de réaliser deux exercices :
1) Tracer, avec l’l'aide d’d'un crayon fixé sur l’l'organe terminal du robot, dans le plan de la plaque supportsupportant différentes figures imposées de difficulté croissante :
a.un. Une ligne de 5cm5 cm de long,
b. Une ligne pointillée de 5cm de long,
c. Un cercle de 2.5cm2,5 cm de rayon,rayonne,
d. Un cercle pointillé de 2.5cm2,5 cm de rayon.rayonne.
Le tracé de chacune des figures doit être réalisé en 10 secondes +/- 0.0,2 secondes.
2) Tracer, avec l’l'aide d’d'un crayon fixé sur l’l'organe terminal du robot, dans le plan de la plaque support, un dessin imposé dans un carré de 5cm par 5cm. Le déplacement de l’l'organe terminal du robot devra être piloté par un joystick . Il est possible que la figure soit discontinue, et donc il faut prévoir de pouvoir relever le crayon du support horizontal sur lequel on écrit.
Une fonction supplémentaire, optionnelle , peut être réalisée :
- Être capable de modifier la vitesse de déplacement du robot via
l’l'interface.
2.2 Fonctions contraintes
Les contraintes imposées sont :
- Respect des règles
d’d'utilisation du FABLAB de Sorbonne Université au seinduqueldesquelles vous travaillerez, en particulier la charte des FabLab du MIT . Cela implique que voustravaillereztravaillez sur le WIKI du FABLAB pour documenter votre projet. Il y a une bonne documentation ici pour savoir comment utiliser le WIKI. - Utilisation de composants (moteurs, contrôleurs, boutons, éléments de guidage, alimentation stabilisée, boutons, etc.) parmi un ensemble imposé. Une liste
dedes composants utilisables est disponible au paragraphe 4. - Fabrication des pièces grâce à :
- Machine à dé
coupecouper LASER. - Imprimantes RAISE 3D PRO2.
- Machine à dé
Ces machines du FABLAB de sont pas toutes accessibles tout le temps ni en même temps. C’C'est une contrainte qu’qu'il vous faut intégrer dans la gestion de votre projet (par exemple, privilégier la découpe LASER qui est très rapide, lorsque c’c'est possible).
Un objectif est de minimiser la quantité de matière utilisée pour réaliser le projet.
- Programmation en C utilisant la chaîne de développement Arduino IDE.
BrainstormingRéflexion
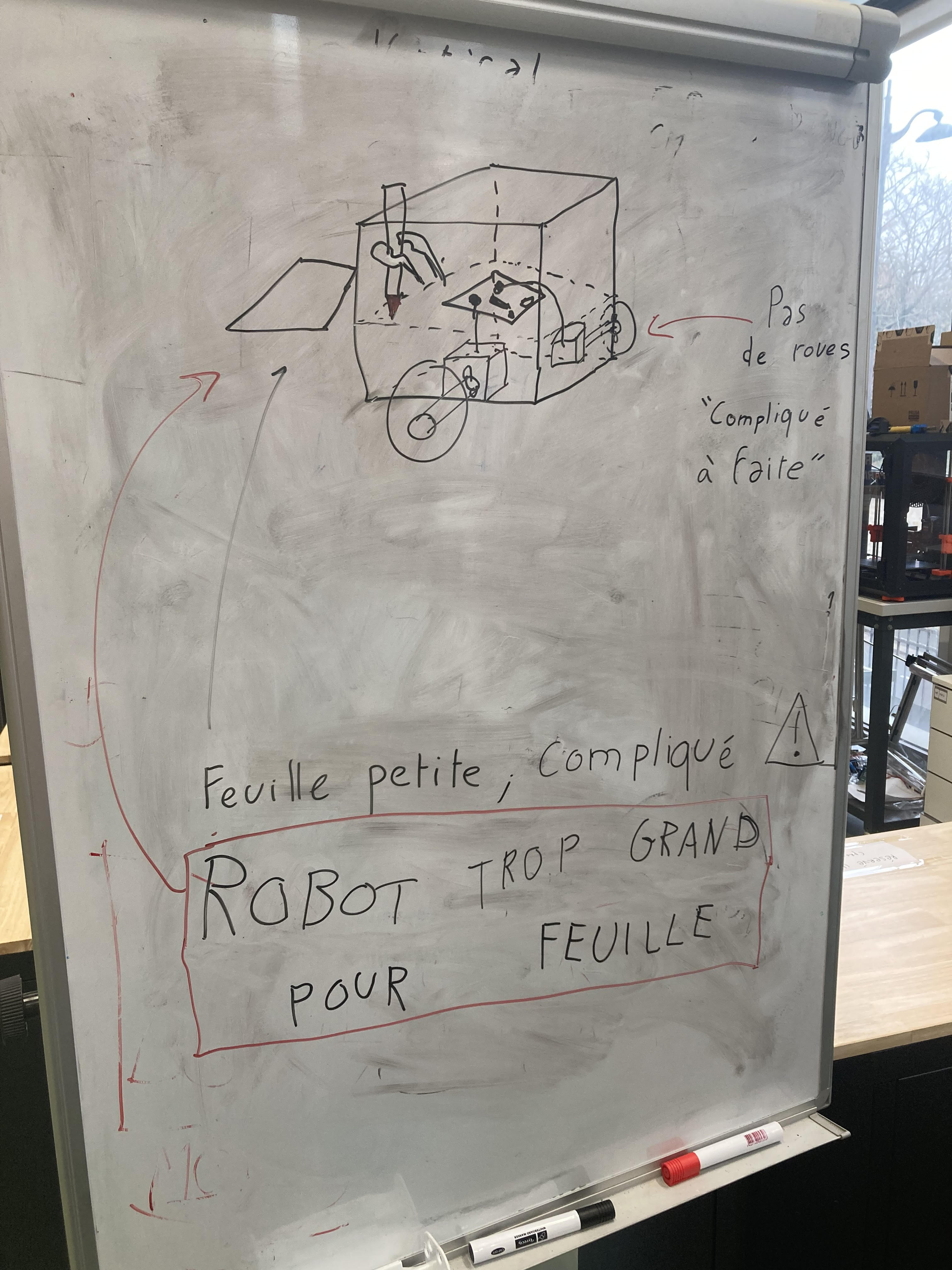

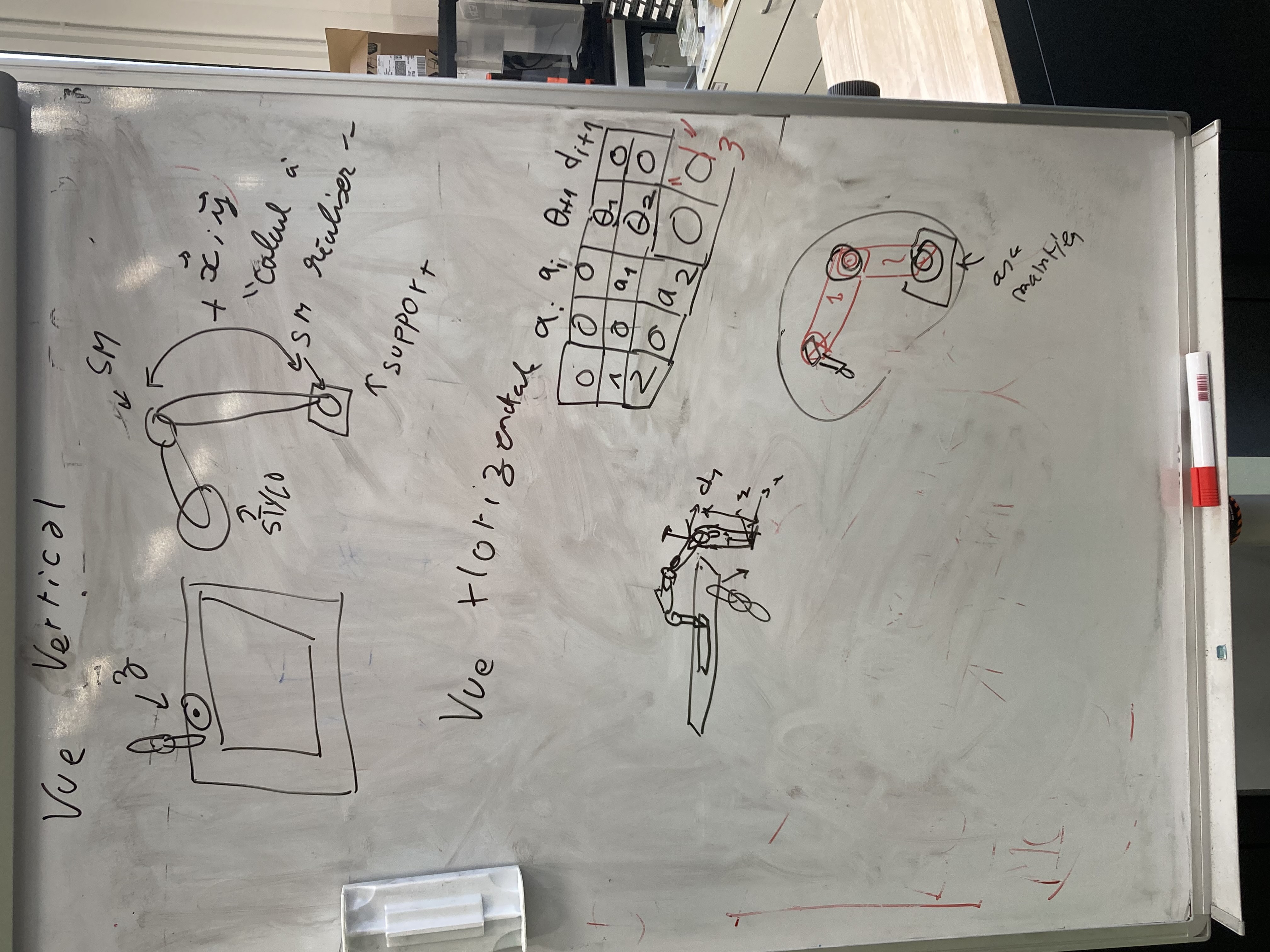
Nous avons décidé, après argumentations, discussions auprès du professeur, de retenir cette dernière solution.
Lien de notre diagramme de gant:
https://docs.google.com/spreadsheets/d/1OmamPJELbAN48oTG1ooIXSrjbCt2yrp1qGpkE4TFLDg/edit?usp=sharing