Projet ROB de Arnold, Evinia, Mathis
Arnold AÏM; Evinia ANASTASOPOULOU; Mathis RENARD.
Présentation du Projet
L'objectif de ce projet est de réaliser un petit mécanisme robotisé permettant de dessiner des formes géométriques simples définies à l'avance ou à l'aide d'un joystick manipulé par l'utilisateur en temps réel en utilisant des mécanismes prédéfinis.
Nous respectons le cahier des charges défini par notre enseignement Guillaume MOREL ci-dessous
Cahier des charges et fonctions à réaliser
Le mais général est de faire un robot capable de dessiner avec un crayon. Le robot est fixé sur un support carré horizontal comportant une petite zone de dessin. Un objectif important est d'utiliser un minimum en quantité de matière pour la réalisation du projet. La programmation est fait en C et en utilisant la chaîne de développement Arduino IDE.
Il y a 2 exercices que le mécanisme doit effectuer et un exercice/fonction optionnel :
Exercice 1
Avoir un code prédéfini pour que le mécanisme puisse tracer, en appuyant sur un seul button, les dessins suivants :
- Une ligne de 5 cm de long,
- Une ligne pointillée de 5cm de long,
- Un cercle de 2,5 cm de rayon,
- Un cercle pointillé de 2,5 cm de rayon.
Le tracé de chacune des figures doit être réalisé en 10 secondes +/- 0,2 secondes.
Exercice 2
Dessiner une figure imposée dans un carré de 5cm par 5cm, tout en pilotant le mécanisme par un joystick. Dans cet exercice il faut prendre en compte que la figure peut être discontinue, auquel cas l'effecteur du robot devrait être capable de se relever du support horizontal auquel il écrit.
Exercice 3 (optionnel)
Ajouter une fonction supplémentaire qui sera capable de modifier la vitesse de déplacement du robot via l'interface.
Réflexion
Idée Robot sur roues
Idée complexe à mettre en place, pas de roues à disposition donc fastidieux à construire plus compliquée de faire un circuit électrique propre à l'intérieur.
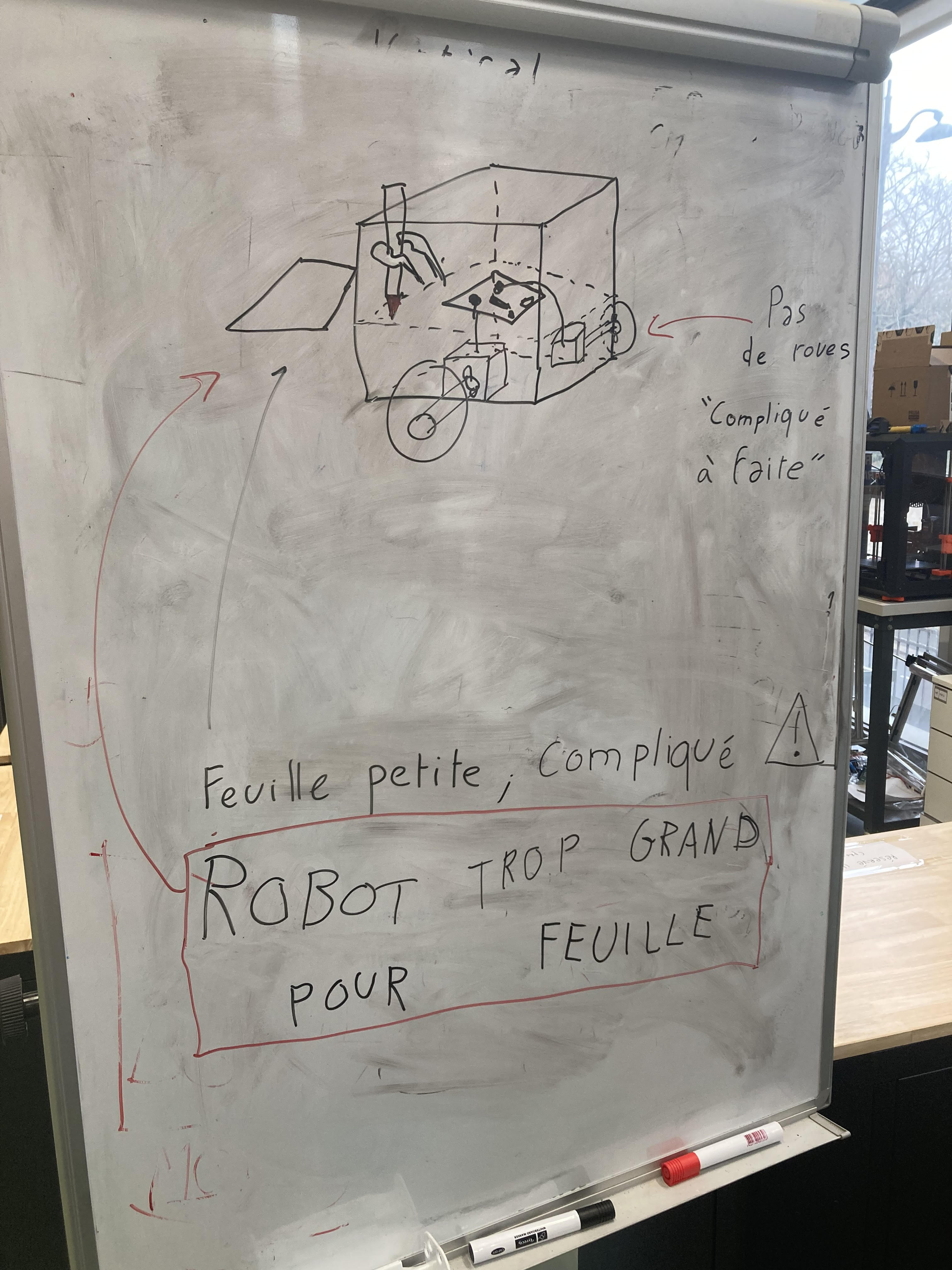
Figure 1 : Idée de robot sur roues
Idée Robot Type Imprimante 3D
Transformation de pivot en translation trop compliqué à faire car création de chaines en 3D trop dur à modéliser/ imprimer en 3D. Aussi, cela entraine une utilisation non pertinente des servomoteurs.

Figure 2 : Idée Robot Type Imprimante 3D
Idée Robot Type FANUC
Nous avons ici une bonne utilisation des servo-moteurs, facile à modéliser/imprimer/découper par les outils en service.
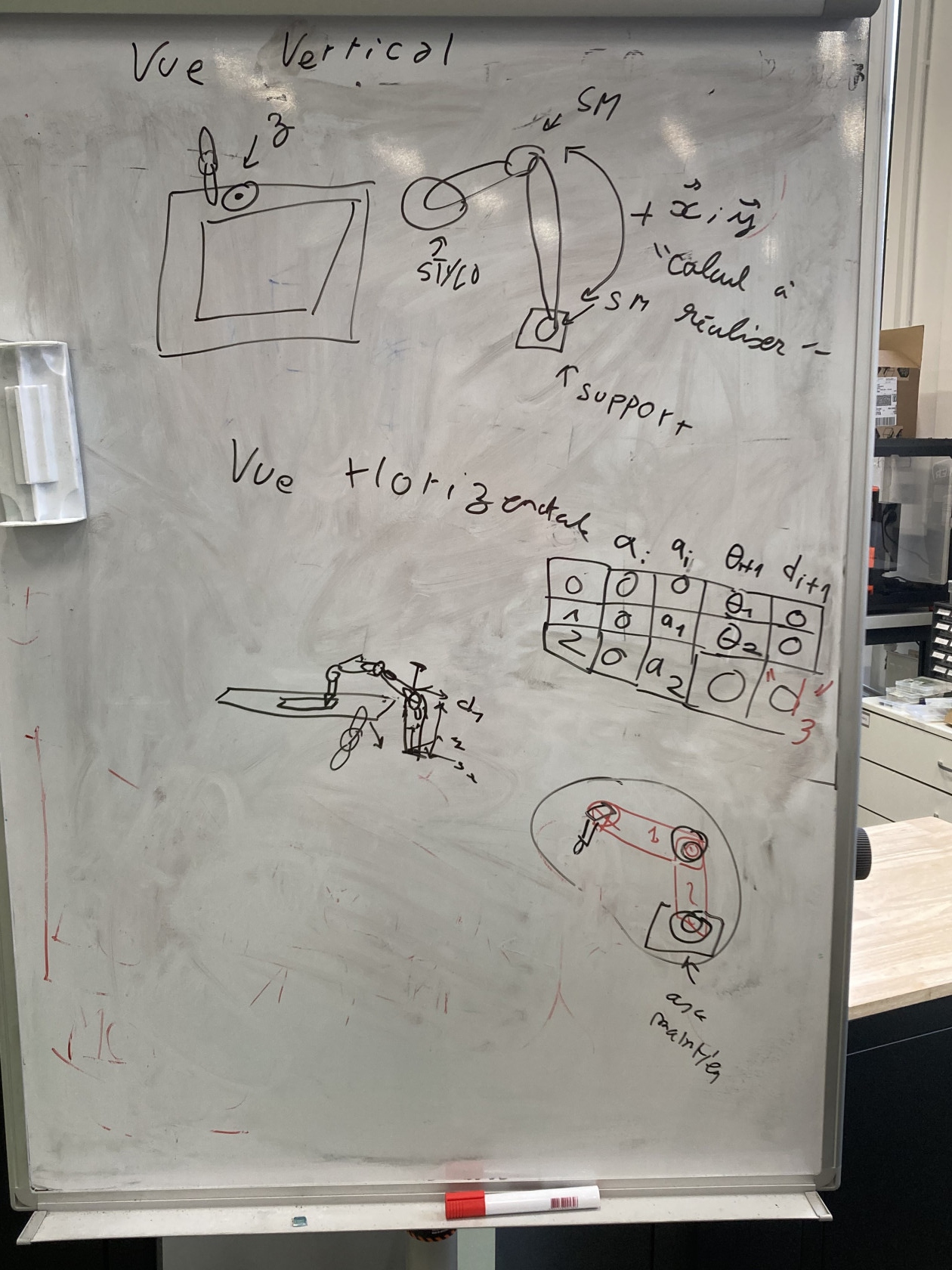
Figure 3 : Idée Robot Type FANUC
Décision finale
Toutes les idées semblaient être plus ou moins possible à concevoir. Nous avons décidé, après argumentations, discussions auprès du professeur, de retenir cette dernière solution car elle va produire des résultats plus précises.
Lien de notre diagramme de Gantt:
https://docs.google.com/spreadsheets/d/1OmamPJELbAN48oTG1ooIXSrjbCt2yrp1qGpkE4TFLDg/edit?usp=sharing
CALCUL DU MODÈLE GÉOMÉTRIQUE INVERSE
Premier idées de calcul de modèle géométrique, inverse, jacobienne… Finalement s'avérant inutile car le calcul d'angle était déjà donné dans le cours.
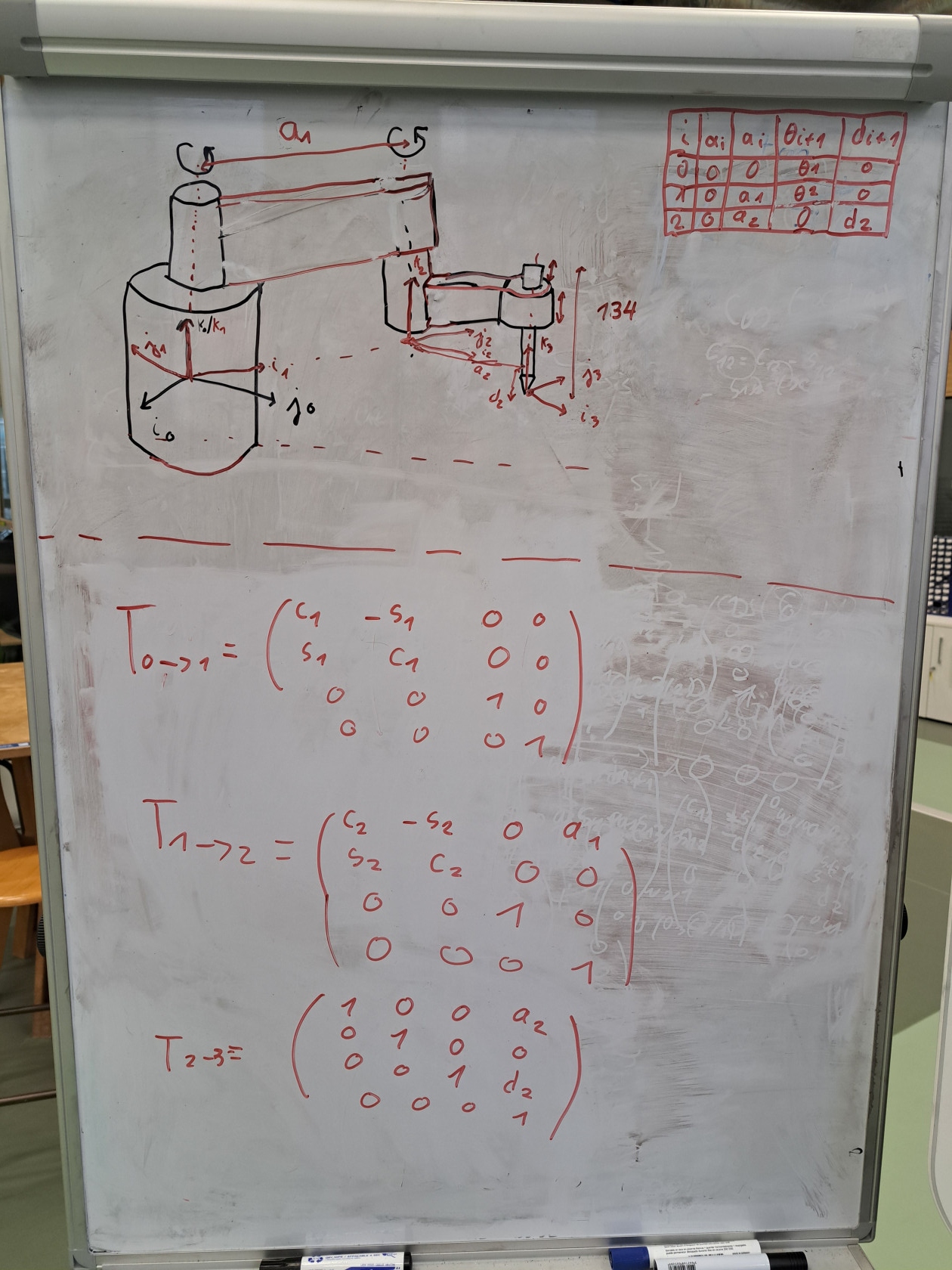
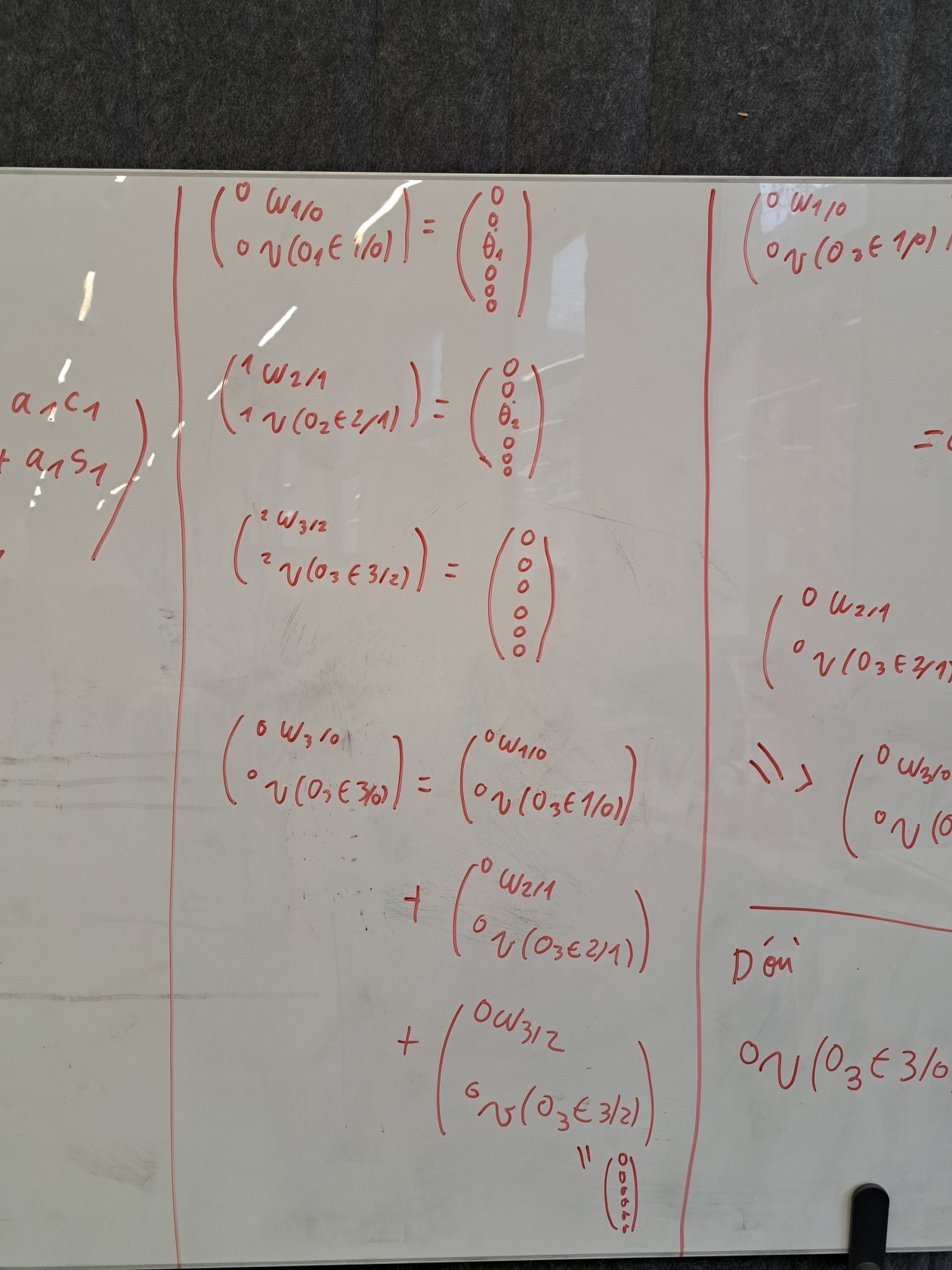


Figures 4 à 8 : Calcul du modèle géométrique
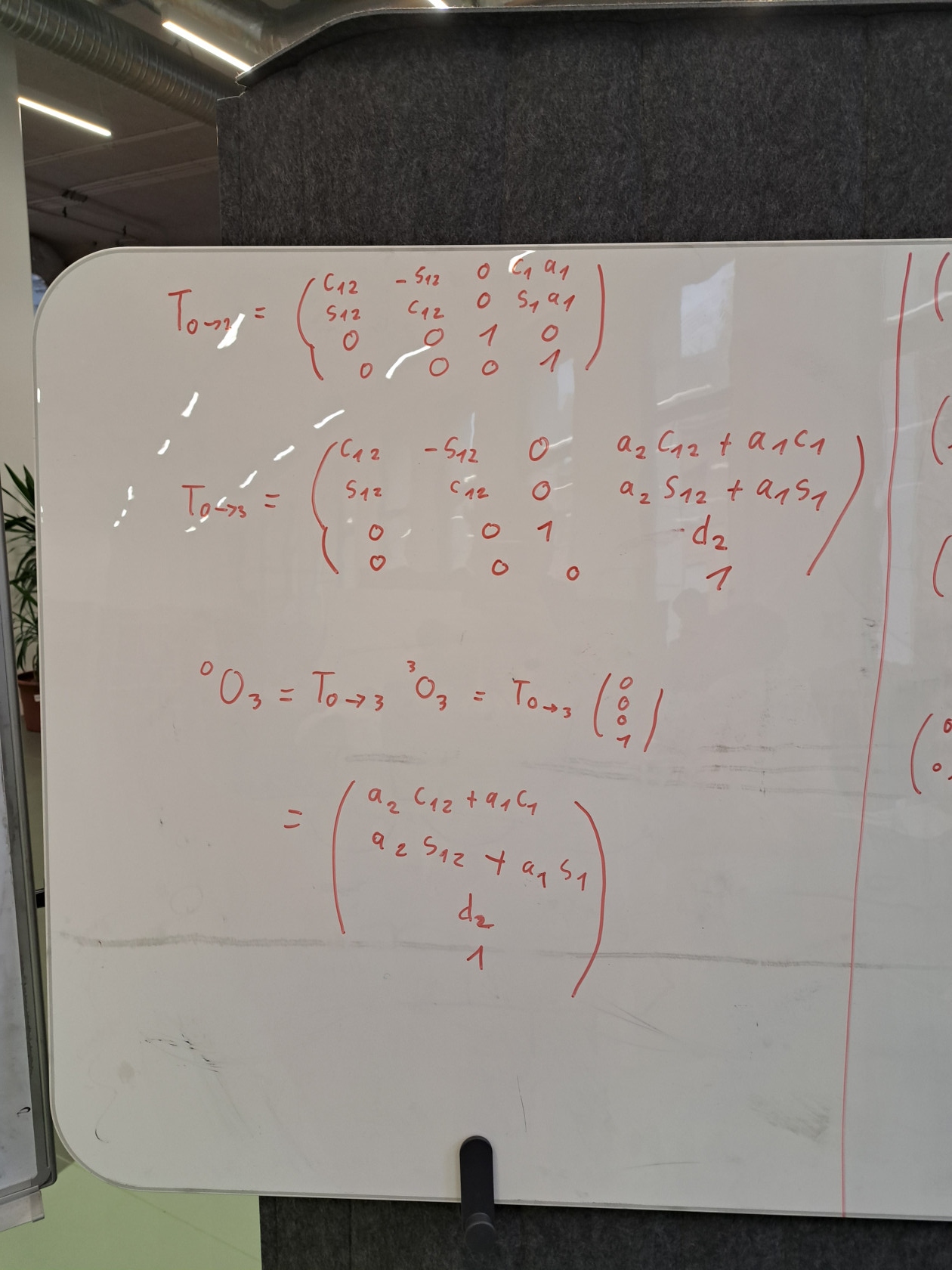
Les formules de calcul finalement retenues sont donc les suivantes :
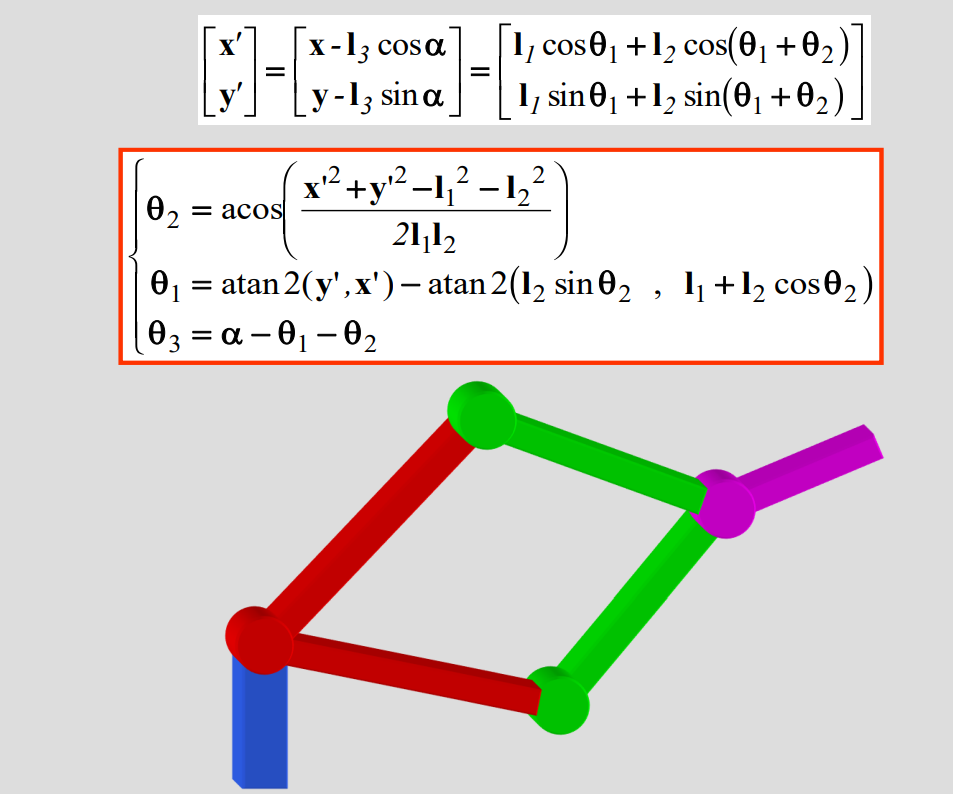
Figure 9 : Formules représentantes des angles
Dans notre cas, il n'y a pas de bras violet, ni de bras rouge et vert en dessous. x' et y' deviennent juste x et y. Et theta3, alpha n'apparaissent plus dans le résultat final. Les angles du robot seront calculés dans une partie Matlab.
Modélisation
 Figure 10 : Mécanisme robotisé
Figure 10 : Mécanisme robotisé
Notre robot se compose d'un châssis principal qui stabilise notre premier moteur HS422 180°, ainsi que d'un second bâti support plus petit qui supporte le servomoteur EMAX ES08A 180°. Deux palonniers sont utilisés comme bras. Le premier palonnier (le plus long), intègre le second moteur HS422 180°, responsable du mouvement de l'effecteur.
Nous avons décidé de positionner le servomoteur EMAX ES08A 180° à la sortie du premier servomoteur HS422 180° afin de contrôler à la fois les mouvements des bras du robot et leur rotation. Cette configuration et surtout cette rotation, nous permettra d'effectuer des dessins en pointillés en autorisant un mouvement vertical du stylo lorsque nécessaire.
Décomposition des éléments
Bâti support
C'est le corps du robot. Il a été conçu pour maintenir notre premier servomoteur HS422 180° en place et il est capable de supporter le reste du robot. Le servomoteur permet la rotation du bras.
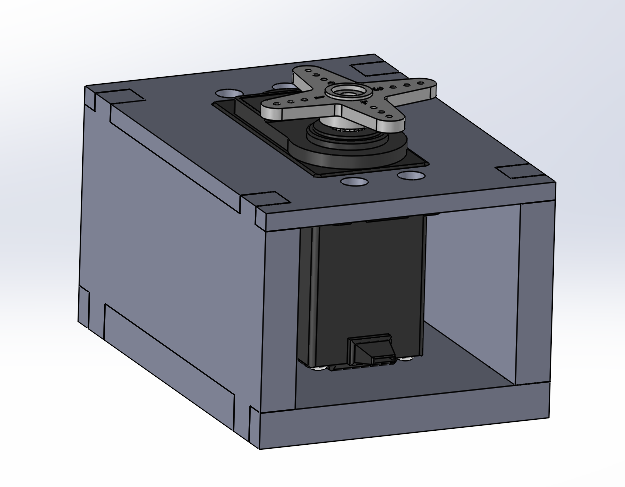
Figure 11 : Bâti support
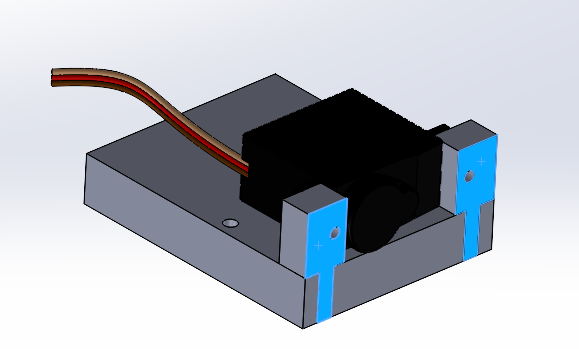
Support petit servomoteur et support bras
Ces deux petit supports qui sont liés entre eux via l'actionneur du servomoteur EMAX ES08A 180° nous permettent :
- d'avoir un support pour le servomoteur EMAX ES08A 180°
- de transmettre la rotation du premier moteur au reste du robot
- d'avoir un support pour le bras du robot qui le relie à l' EMAX ES08A 180° et donc au corps
- de tourner le bras du robot pour contrôler si l'effecteur (crayon) touche ou pas la surface du dessin
Le support du petit servomoteur comporte l'empreinte du palonnier à la face du dessous (Figure 13)13) pour bien le relier au premier servo. Nous avons décidé de placer un pont autour du servomoteur pour être sûr de son MAP avec le support. Nous avons aussi placé deux petits "freins" (Figure 14) pour que le servomoteur puisse bien maintenir son position. Le palonnier du petit servomoteur est relié avec une vis centrale et deux fils au support du bras. Cela fait partie du MAP de cet ensemble.

Figure 12 : Support petit servomoteur et support bras
 |
 |
| Figure 13 : Support servomoteur face du dessous | Figure 14 : "Freins" (en bleu) |
Bras
Le "main" du robot est composé de deux bras. Le premier (celui de gauche et donc celui qui est plus long, Figure 15)15) comporte le troisième servomoteur (HS422 180°) qui réalise la deuxième rotation de l'effecteur dont on a besoin. Le deuxième bras (Figure 16)16) comporte l'empreinte du palonnier pour qu'il puisse être rélié au servomoteur ainsi qu'un trou pour positionner le crayon.
 |
 |
| Figure 15 : Bras long |
Figure 16 : Bras en extrémité |
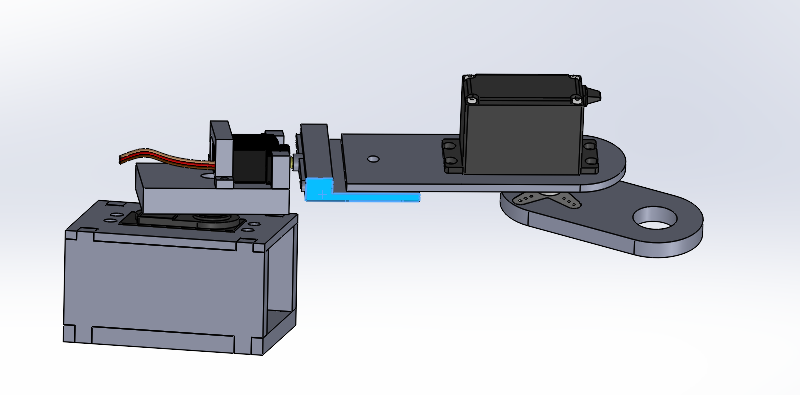
Figure 11 : Rotation des bras
Fabrication des pièces
Toutes nos pièces sont fabriquées et prototypées en utilisant la méthode de découpe LASER Troctec Speedy 100. En effet, la précision de la machine permet d'obtenir des pièces précises et simples depour notre robot.
Montage du robot
Assemblage du robot à l'aide de vis-écrous, colle à bois et fil de fer. Le système étant non concluant, nous remédions aux soucis dû à la surcharge portée par le petit servomoteur grâce à la réduction de la taille de l'avant-bras. Nous collons alors le robot sur un support en bois pour pouvoir le maintenir par rapport à la feuille sur laquelle il dessinera.
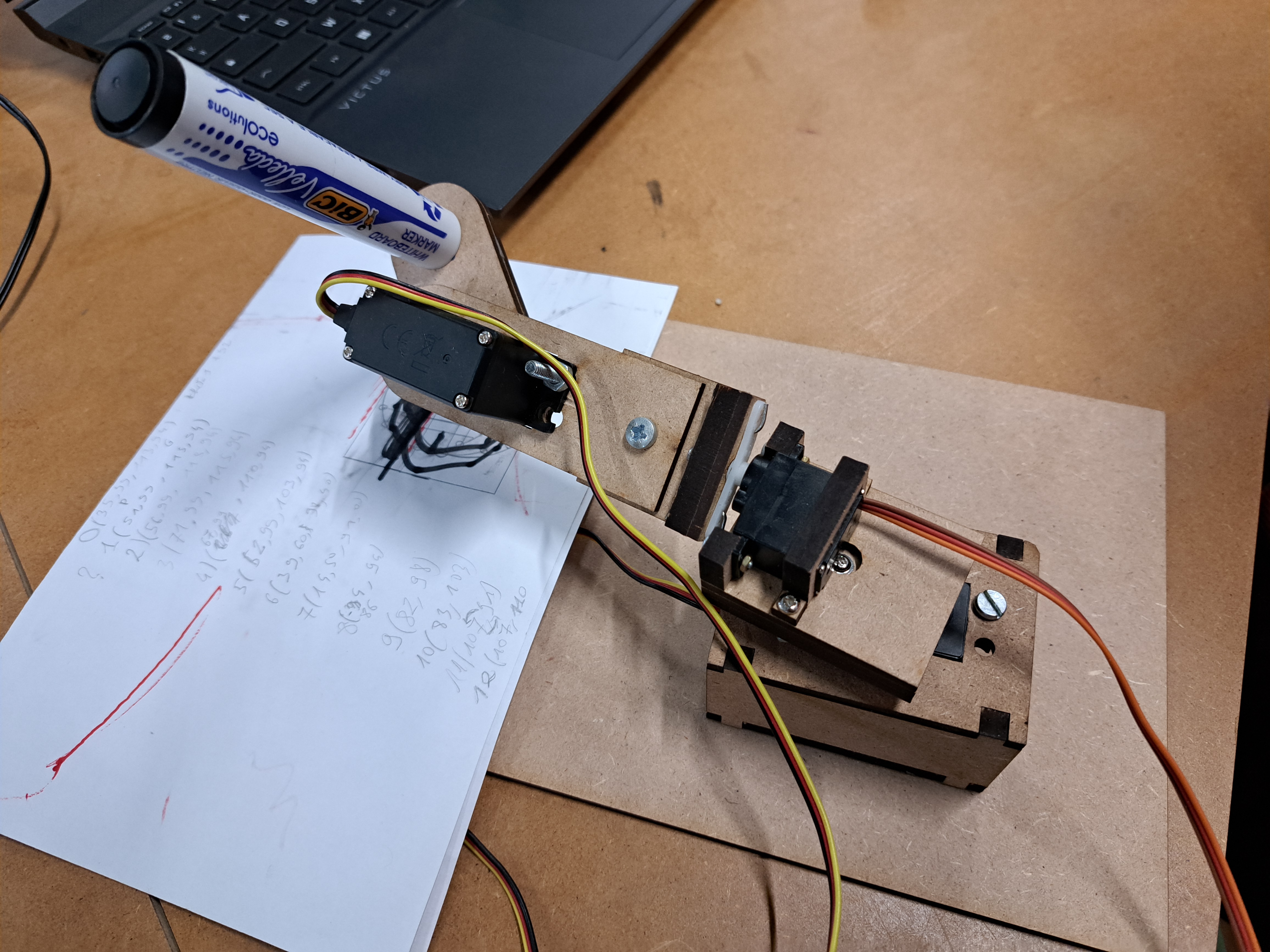
Image du robot monté
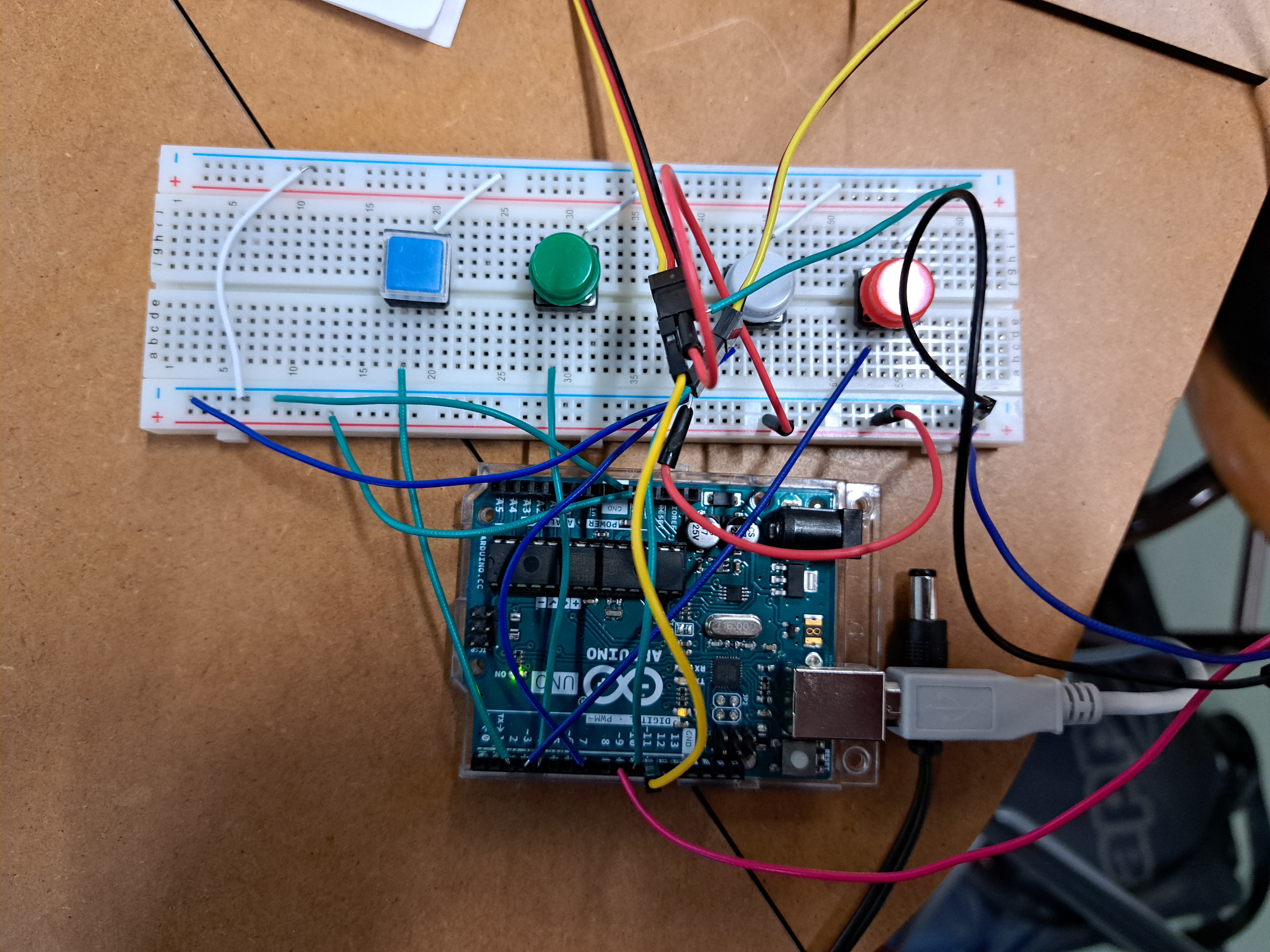
Image du système électronique