PROJET ROB de Maroua, Marco, Yanis
Projet Maranis : Un robot éécrivain
Informations
- Membres :
- Maroua Hriouit
- Yanis Sadoun
- Marco Grandclaude
- Mail:
- Polytech ROB 3
AnnéAnnée 2023-2024 - 7
féfévrier 2024 - mai 2024
Contexte et objectifs :
DéDéfinition et objectifs du projet : Un robot qui dessine
Dans le cadre de nos éétudes en robotique, on est amenéamené àà concevoir un robot capable de dessiner a l’l’aide d’d’un crayon fixéfixé àà l’extrémitél’extrémité terminale du robot.
L'objectif principal de ce projet consiste àà éélaborer et mettre en œœuvre un systèsystème robotique complet, englobant sa composante mémécanique, son systèsystème de motorisation, son dispositif de commande, ainsi que son interface de pilotage. Le cahier des charges fourni dédéfinit de manièmanière détaillédétaillée les fonctions que le systèsystème doit exéexécuter et les contraintes auxquelles il doit se conformer.
Pour nous, éétudiants, ce projet offre l'opportunitéopportunité d'acquéacquérir une expéexpérience professionnelle en gestion de projet, en mettant particulièparticulièrement l'accent sur le travail en ééquipe. Il nous permettra éégalement de mettre en pratique tout ce que nous avons étudiéétudié tout au long du premier semestre, y compris la conception et la modémodélisation, le calcul des modèmodèles géomégéométriques direct et inverse, ainsi que la programmation en C. Et enfin apprendre àà manipuler des machines d’d’impression 3D et dédécoupe LASER.
Lors de notre premièpremière séséance, nos professeurs nous ont fourni une description fonctionnelle détaillédétaillée des besoins et contraintes pour notre projet. C'est sur cette base que nous avons construit et développédéveloppé notre plan de travail. Voici un résumérésumé de ces exigences cléclés :
Description fonctionnelle des besoins :
1 - Dessin PréPrécis : Le robot doit êêtre capable d'exéexécuter des dessins préprécis dédéfinies en 10 secondes +/- 0.2 secondes conforméconformément aux spéspécifications fournies, en respectant les dimensions et les formes dédéfinies :
a. Une ligne de 5cm de long,
b. Une ligne pointillépointillée de 5cm de long,
c. Un cercle de 2.5cm de rayon,
d. Un cercle pointillépointillé de 2.5cm de rayon.
2 - Dessiner, en utilisant un crayon fixéfixé àà l'extrémitéextrémité du bras robotique, un motif prédéprédéfini sur le plan de la plaque de support, dans un carrécarré de dimensions 5 cm par 5 cm. Le dédéplacement du bras robotique sera contrôlécontrôlé par un joystick. Il est àà noter que la figure peut êêtre discontinue, ce qui implique la nécessiténécessité de pouvoir soulever le crayon du support horizontal au besoin.
3 - Une fonctionnalitéfonctionnalité supplésupplémentaire pourrait êêtre mise en œœuvre : La possibilitépossibilité de rérégler la vitesse de dédéplacement du robot àà travers l'interface.
Moyens àà disposition :
- Un crayon
- Interface de commande :
- Une carte arduino UNO avec câcâble USB-B ;
- Un joystick ;
- Une platine de prototypage ;
- Alimentation régulérégulée 5V ;
- CâCâbles, LEDs, boutons poussoirs, rérésistances.
- Motorisation :
- Deux servomoteurs HS422 180°180° ;
- Un servomoteur Emax ES08A 180°180°.
- MéMécanique :
- MatièMatière PLA pour impression 3D ;
- Feuilles medium : 3mm et 6mm d’éd’épaisseur ;
- Vis et éécrous : M2, M2.5, M3, M4.
- Roulements et axes de
diamèdiamètre 4mm.
Diagramme de Gantt :

💭 Remarque Importante : Il est important de noter que notre diagramme de Gantt est un outil vivant. Comme le projet progresse, nous pouvons nous attendre àà ce qu'il soit ajustéajusté et modifiémodifié pour reflérefléter l'éévolution de nos plans et la réalitéréalité de notre progression. Cette flexibilitéflexibilité nous permettra de rester réréactifs et adaptatifs face aux dédéfis et aux opportunitéopportunités qui se préprésenteront.
Etape 1 : Propositions de réréalisation et analyse des risques 🔍⚙️
Solution 1 : Robot voiture
Principe :
Comme premièpremière solution, l'idéidée consiste d'utiliser une voiture àà deux roues sur laquelle seront fixéfixés nos deux moteurs. Ensuite, nous envisageons de positionner une forme cylindrique sur la voiture, àà l'intéintérieur de laquelle sera intégréintégré un engrenage. Cette configuration permettrait la translation du stylo selon l'axe z, offrant ainsi une méméthode mémécanique pour réréaliser les mouvements nénécessaires àà notre robot.
Croquis :
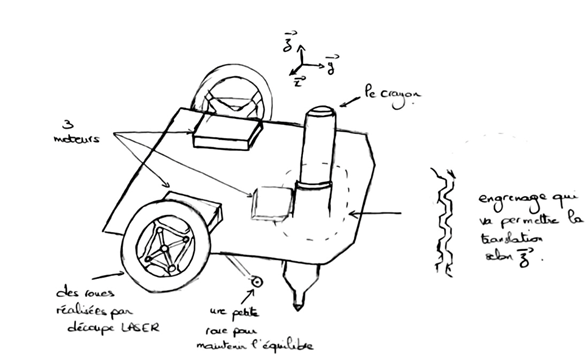
figure 1 : croquis du robot voiture
SchéSchéma cinécinématique :
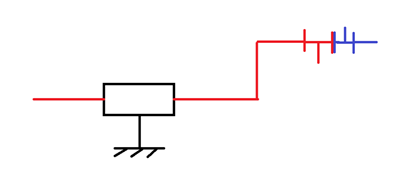 figure 2 : s
figure 2 : schéchéma cinécinématique du robot voiture
Contraintes:
Compte tenu des moteurs utiliséutilisés, cette solution ne sera pas viable. En effet, les servomoteurs n'effectuent qu'une rotation de 180 degrédegrés, ce qui signifie que pour parcourir une certaine distance D, il faudra effectuer n tours de 360 degrédegrés. Cela nous obligerait àà utiliser un diamèdiamètre de roues trètrès important, entraîentraînant des complications liéliées aux calculs et aux glissements.
Solution 2 : robot cartécartésien
Principe :
Ce robot serait conçconçu pour se dédéplacer suivant un systèsystème de coordonnécoordonnées en X et Y, offrant une grande préprécision dans un espace bidimensionnel.
La particularitéparticularité de ce robot réréside dans sa capacitécapacité àà effectuer des translations le long de deux axes distincts : horizontal (axe X) et vertical (axe Y). Pour ce faire, le robot serait équipééquipé de rails horizontaux et verticaux, permettant des mouvements fluides et contrôlécontrôlés dans ces deux directions.
Croquis :
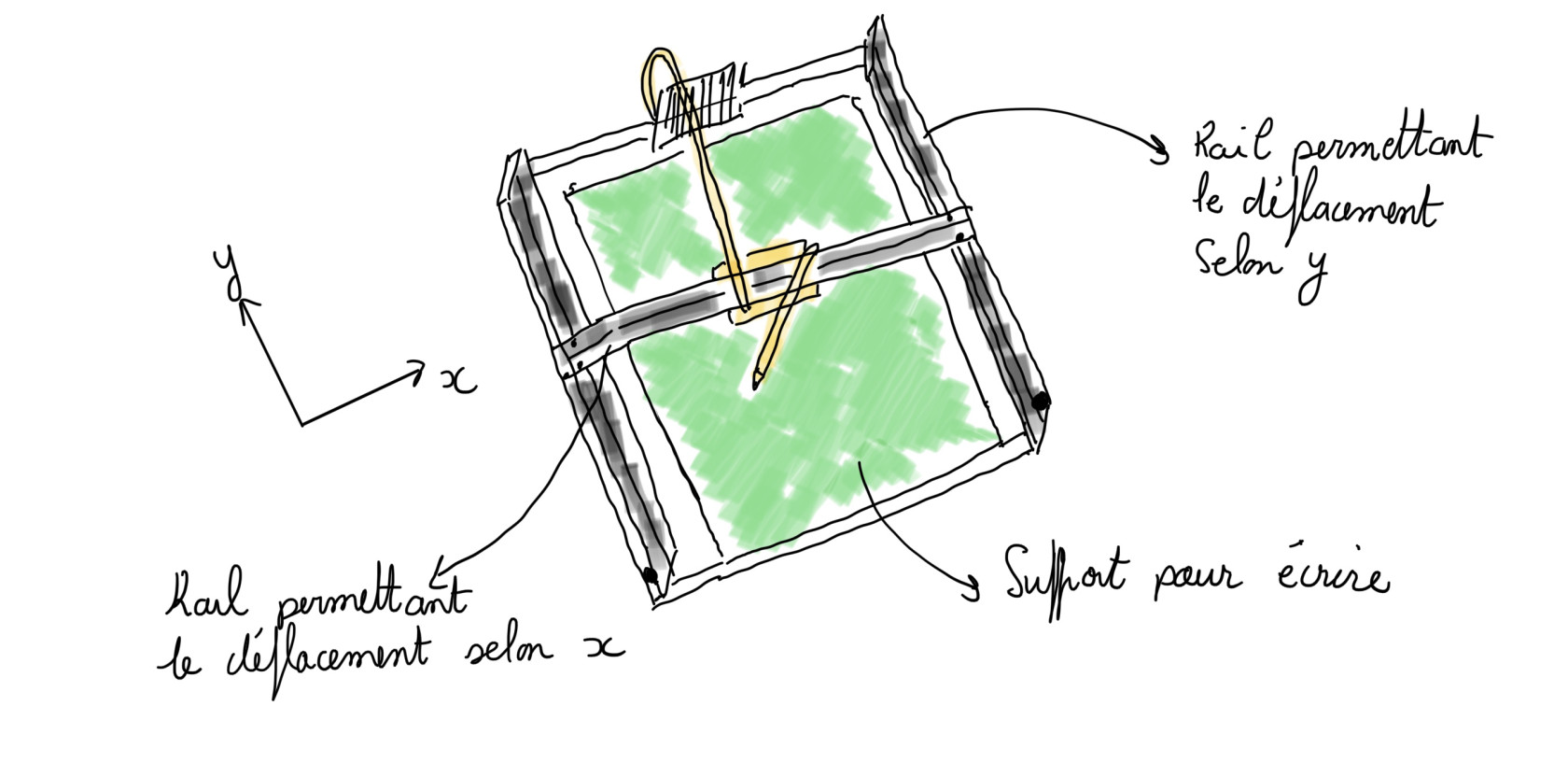
figure 3: croquis du robot cartécartésien
SchéSchéma cinécinématique :
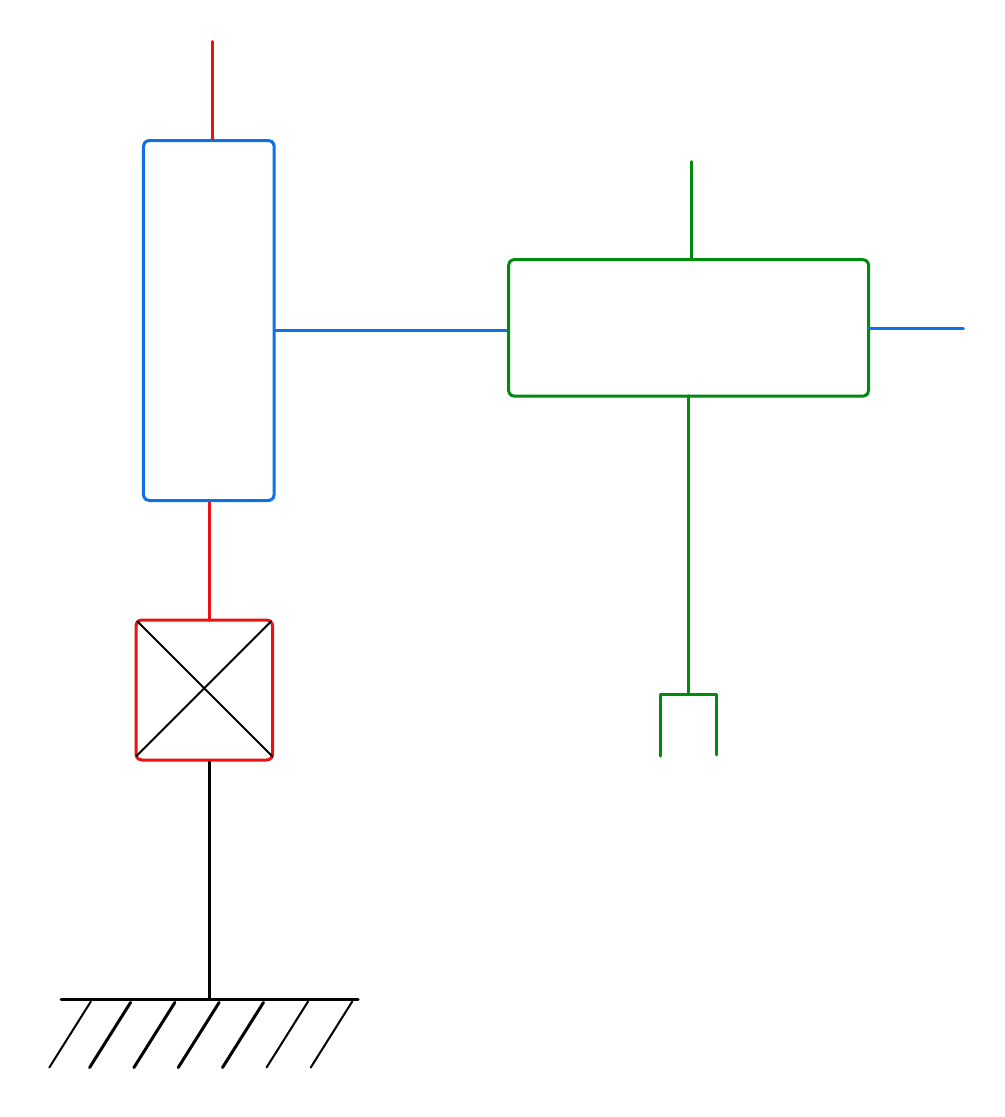
figure 4 : schéchéma cinécinématique du robot cartécartésien
Contraintes :
Manque de matématériel pour les translations : Nous ne disposons pas des composants nénécessaires, tels que des courroies, pour réréaliser les translations efficaces sur les axes X et Y. L'absence de ces élééléments essentiels est un obstacle àà la construction de ce systèsystème .
ComplexitéComplexité de fabrication des rails : La conception et la réréalisation des rails, essentiels pour les dédéplacements préprécis du robot, nous semblent particulièparticulièrement complexes, surtout avec les seuls servomoteurs disponibles.
IncapacitéIncapacité de mouvement sur l'axe Z : Avec les composants actuels, le robot ne serait pas capable de lever le crayon le long de l'axe Z. Cette limitation rend impossible la réréalisation de tracétracés en pointillépointillés, une des exigences cléclés du cahier des charges.
Bien que conceptuellement intéintéressante, la solution du robot cartécartésien se heurte àà des contraintes matématérielles et techniques qui compromettent sa faisabilitéfaisabilité dans notre contexte actuel.
Solution 3 : Robot constituéconstitué d'axe en sésérie
Principe :
Le robot envisagéenvisagé se caractécaractérise par une structure àà axe en sésérie. Il intèintègre un châchâssis stable comme base principale, sur lequel est fixéfixé un bras articuléarticulé. Ce bras se compose de trois segments (bielles), chacun connectéconnecté au suivant via une liaison pivot, permettant ainsi une gamme éétendue de mouvements. La dernièdernière bielle est directement soudésoudée àà un adaptateur, conçconçu pour maintenir fermement un stylo. La stabilitéstabilité et la préprécision du mouvement des bielles seront assuréassurées par l'intéintégration de roulements. ParallèParallèlement, un support de feuille sera installéinstallé, alignéaligné dans le mêmême plan que le châchâssis du robot, afin de faciliter l'interaction préprécise du stylo avec le papier.
Croquis :
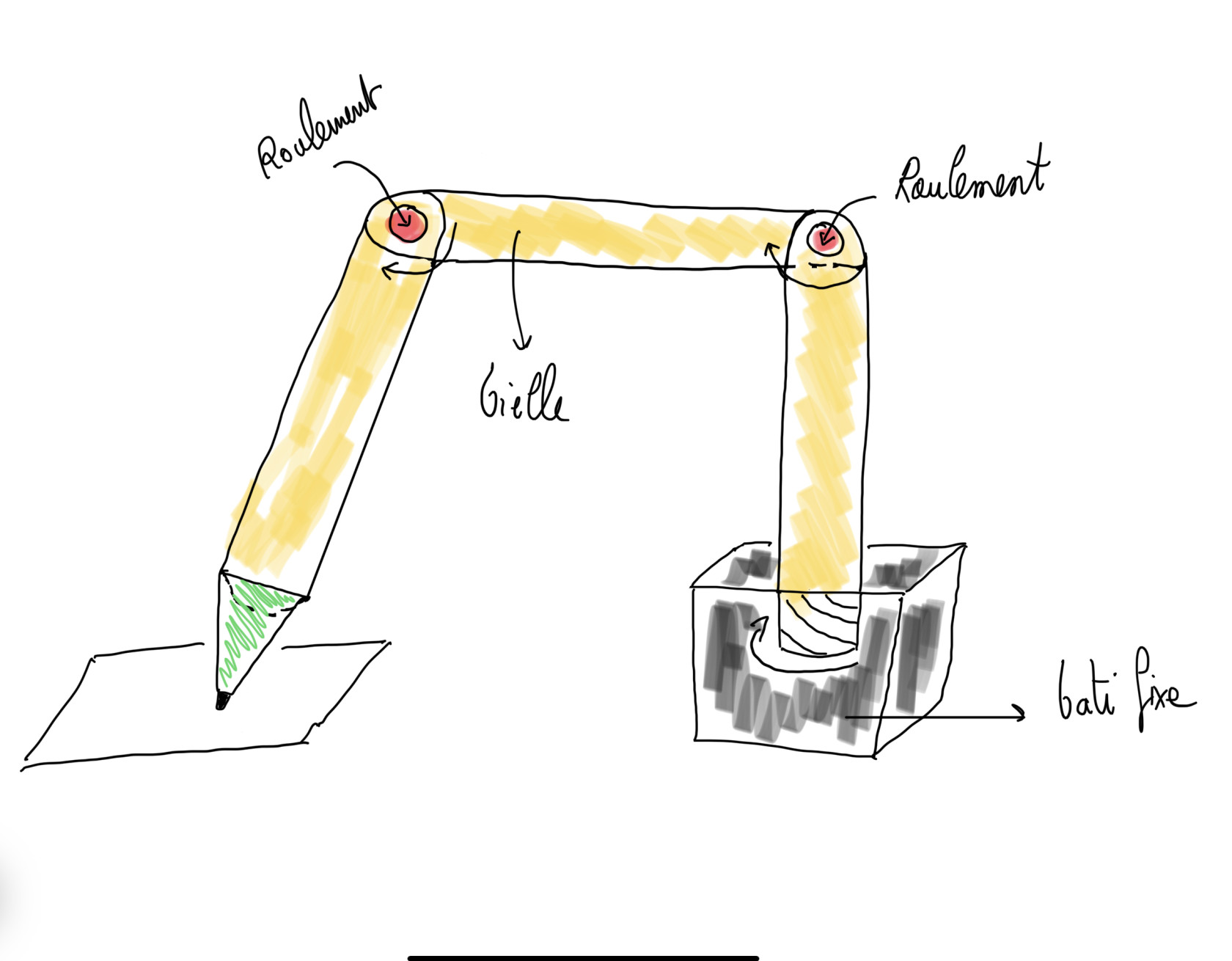
figure 5 : croquis du robot àà axe en sésérie
SchéSchéma cinécinématique :

figure 6 : schéchéma cinécinématique du robot àà axe en sésérie
Avantages :
-
CinéCinématique simple : La structureàà axe ensésérie offre unecinécinématique plus facileàà concevoir etàà programmer,grâgrâceàà unechaîchaînecinécinématiquelinélinéaire et moins complexe.
Risques et dédéfis :
-
StabilitéStabilité structurelle : Ces robots peuventpréprésenter desproblèproblèmes destabilitéstabilité, surtout lors de la manipulation de charges ou lors de mouvements rapides. -
PréPrécision dans les positionsextrêextrêmes : Lapréprécision peut diminuer auxextrémitéextrémités de laportéportée du robot,oùoù les effets de lagravitégravité et de la flexion des composants sont plusprononcéprononcés.
Solution 4 : Robot àà trois rotations
Principe :
Ce concept de robot s'inspire directement de la morphologie humaine, intéintégrant trois axes de rotation pour imiter les mouvements naturels du corps. En faisant une analogie avec le corps humain, la gestion de la hauteur de la pince (qui agirait comme une main) est assuréassurée par deux rotations principales : une au niveau de l'«« éépaule »» et une autre au niveau du «« coude »», correspondant respectivement aux rotations 2 et 3 du systèsystème. Cette configuration permet une manipulation verticale préprécise et polyvalente de la pince. Pour complécompléter la gamme de mouvements, une troisiètroisième rotation est ajoutéajoutée au niveau du «« poignet »», offrant la capacitécapacité de torsion. Cette troisiètroisième rotation apporte une flexibilitéflexibilité supplésupplémentaire, essentielle pour des tâtâches complexes nénécessitant une orientation fine de la pince.
Croquis :
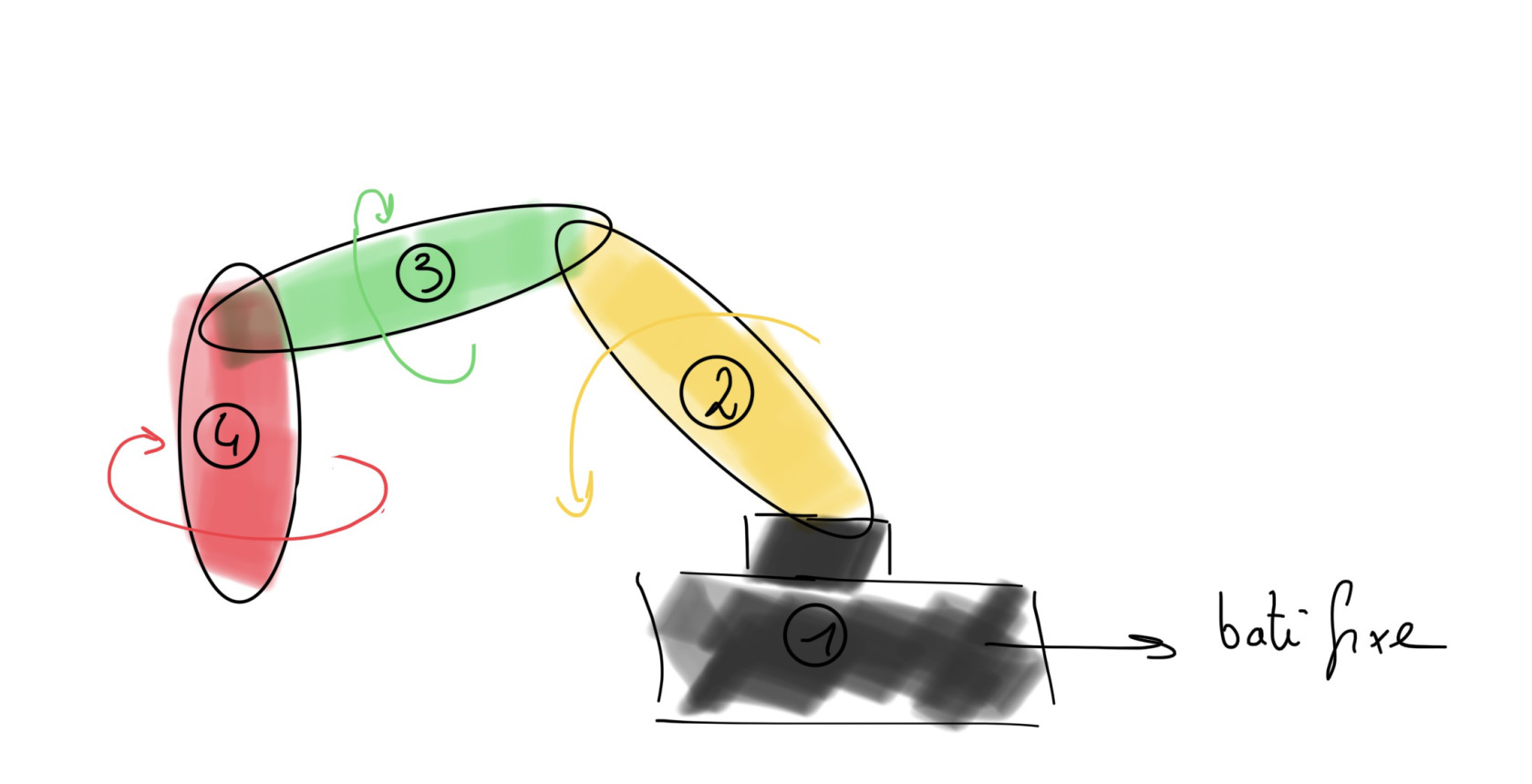
figure 7 : croquis du robot àà 3 rotations
SchéSchéma cinécinématique :
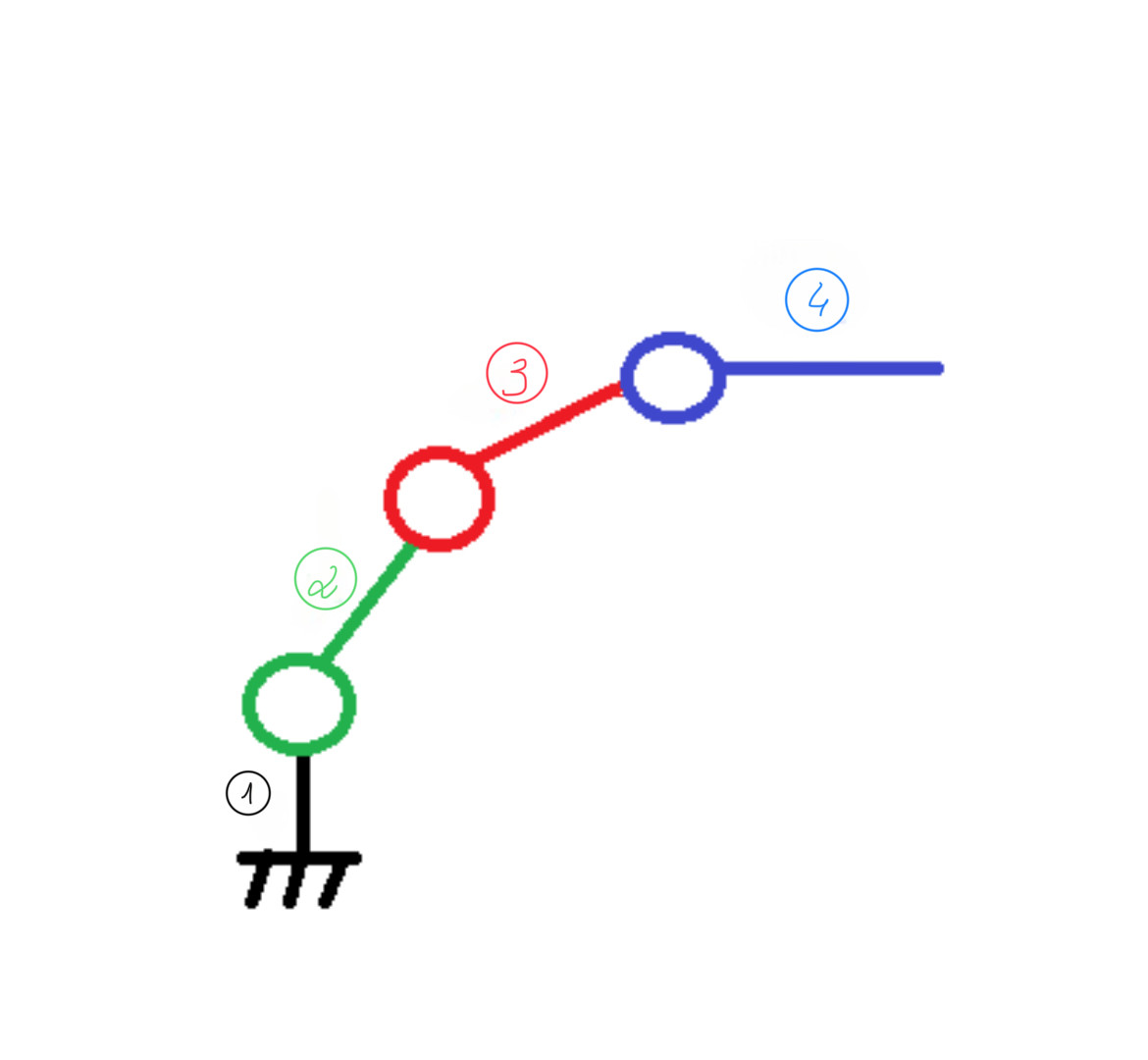
figure 8 : schéchéma cinécinématique du robot àà trois rotations
Avantages :
- Fabrication plus efficace :
L’L’ensemble despièpièces peuventêêtreréaliséréalisé endédécoupe laser ce qui permet une production plus rapide etpréprécise despièpièces.
InconvéInconvénients :
-
StabilitéStabilité du stylo : Assurer que le stylo restepréciséprécisémentàà la position voulue durant les mouvements complexes. -
ComplexitéComplexité dumodèmodèlecinécinématique inverse : La gestion des trois rotations (éépaule, coude, poignet) rend le calcul dumodèmodèlecinécinématique inverse complexe, crucial pour lapréprécision des mouvements du robot.
Solution 5 : Robot avec bras parallèparallèles
Principe :
Le concept envisagéenvisagé ici est celui d'un robot àà bras parallèparallèle àà deux axes. Afin de gégérer les dédéplacements verticaux du stylo le long de l'axe Z, le systèsystème sera dotédoté d'un mémécanisme pignon-crémaillècrémaillère. Ce dispositif garantit une transition douce et maîtrisémaîtrisée du stylo, éévitant ainsi les saccades ou les dédécalages qui pourraient compromettre la qualitéqualité du tracétracé.(le stylo montera et descendra avec une fluiditéfluidité et une régularitérégularité qui permettront de maintenir une qualitéqualité de dessin constante). Comme pour le modèmodèle àà axe en sésérie, les points de pivot au niveau des "coudes" du robot seront équipééquipés de roulements.
Croquis :
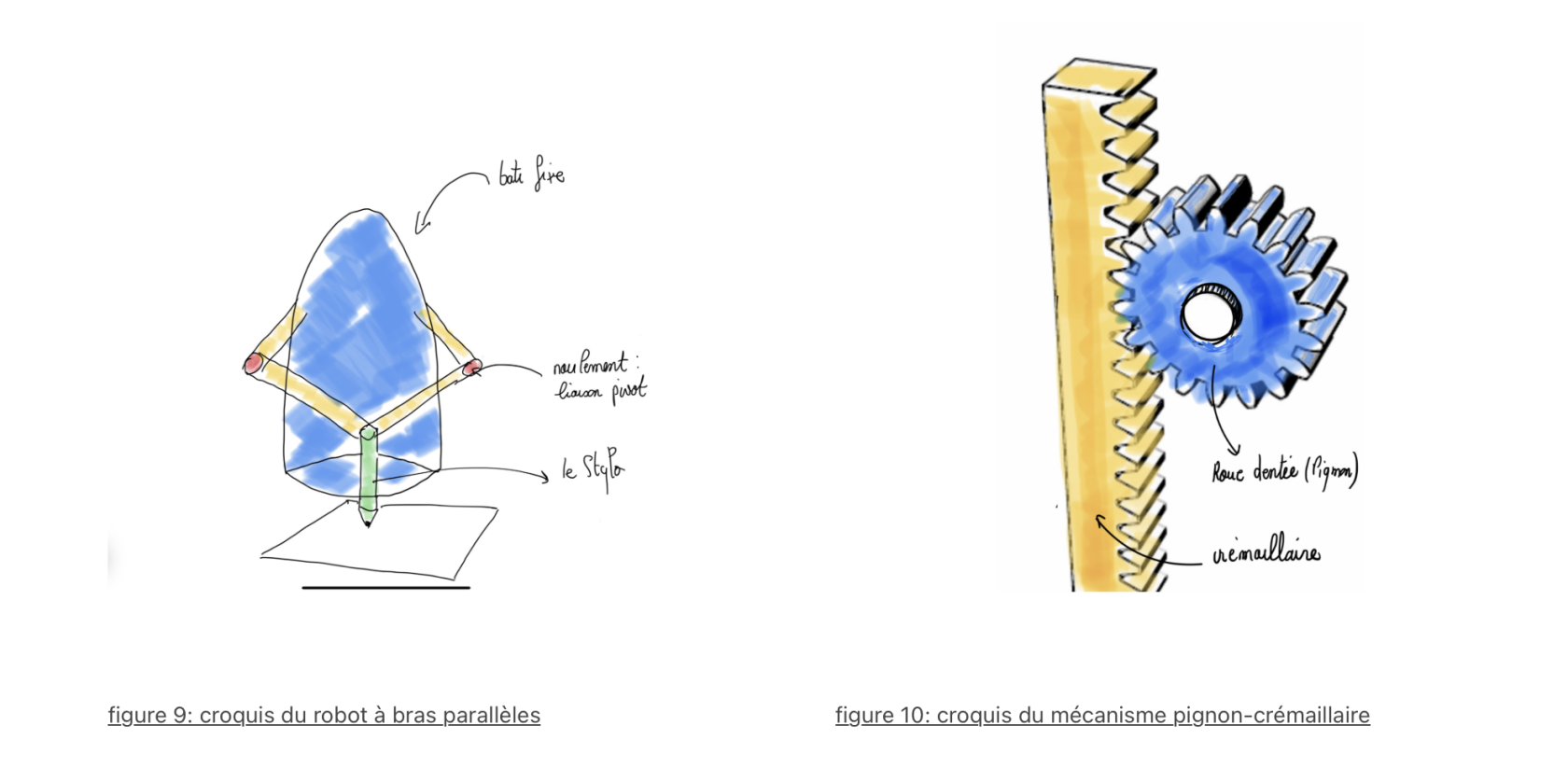

figure 11: croquis détaillédétaillé de notre robot àà bras parallèparallèles
SchéSchéma cinécinématique :
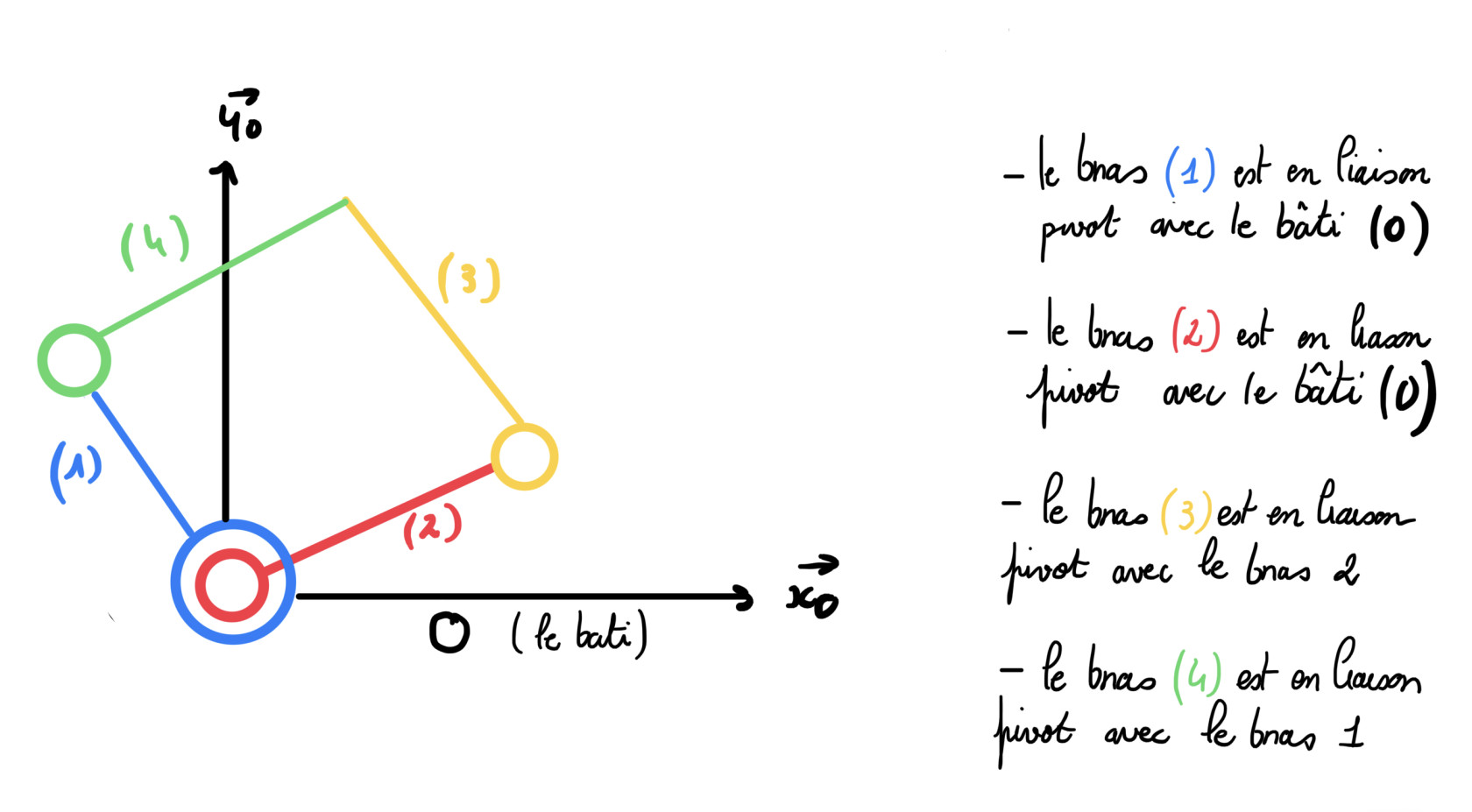
figure 12 : schéchéma cinécinématique du robot àà bras parallèparallèles
Avantages :
SoliditéSolidité structurelle : Les robotsparallèparallèles offrent une grandesoliditésolidité etstabilitéstabilité, ce qui est avantageux pour destâtâchesnénécessitant de lapréprécision et de la force.-
CinéCinématiquesimplifiésimplifiée possible : En configurant les bras du robot pour former unparalléparallélogramme avec les axes de servomoteursalignéalignés, il est possible de simplifier lacinécinématique, facilitant ainsi la programmation et lecontrôcontrôle.
Risques et dédéfis:
-
ComplexitéComplexitécinécinématique initiale : Sans cette simplification, lacinécinématique des robotsparallèparallèles peutêêtre initialement plus complexe,nénécessitant unecomprécompréhension approfondie dessystèsystèmesmémécaniques.
De plus , il faut s’s’assurer que les rotations des servomoteurs de 180°180° permettent de couvrir l’l’ensemble de la surface souhaitésouhaitée.
Solution retenue
Suite àà une analyse approfondie des diffédifférentes options, notre ééquipe a décidédécidé de priviléprivilégier la conception d'un robot parallèparallèle pour la suite du projet. Cette dédécision s'appuie sur plusieurs facteurs cléclés :
-
ConformitéConformité au cahier des charges : Le robotparallèparallèlerérépond efficacement aux exigencesspécifiéspécifiées dans le cahier des charges. Sa structure offre lapréprécision et lasoliditésolidité requises pour lestâtâchespréprévues, tout en permettant une gamme de mouvementsadaptéadaptéeàà nos besoins. -
FaisabilitéFaisabilité technique : Avec les composants et les ressourcesàà notre disposition, laréréalisation d'un robotparallèparallèle est non seulement possible maiséégalement pratique. Lapossibilitépossibilité de simplifier sacinécinématique en configurant ses bras enparalléparallélogramme facilite sa programmation et soncontrôcontrôle, rendant le projet plusgégérable dans le cadre de nos contraintes techniques et temporelles.
Nota bene : Le nom de notre robot sera "Maranis"; il est forméformé en combinant les préprénoms Maroua, Marco, et Yanis. Il symbolise l'union de nos efforts et la collaboration au cœcœur de notre projet...
Etape 2 :Conception DétailléDétaillée de Notre Projet 🌟🛠️💡
A) calculs MéMécaniques 🛠️
ÀÀ cette éétape, nous nous sommes concentréconcentrés sur les aspects techniques du projet en abordant la modélisation mécanique appliquée aux bras de notre robot. Notre objectif ? Détailler les modèles géométriques, à la fois direct et inverse, que nous avons développés. En effet, ces modèles sont cruciaux pour préciser la position de l'effecteur du robot.
L'utilisation de ces modèles géométriques nous offre la capacité de réguler avec exactitude la position et l'orientation de l'effecteur, en se basant sur les angles des articulations. Cette précision est fondamentale pour diverses applications dans les domaines de la robotique et de l'automatique, où la manipulation et le positionnement exacts sont primordiaux.
A - Modélisation du problème
- Configuration des Moteurs et Simplification Géométrique : Les moteurs de notre robot sont disposés l'un au-dessus de l'autre, mais orientés en sens inverse. Cette configuration particulière permet d'aligner les axes des moteurs, réduisant ainsi l'espace entre deux corps liés et simplifiant de ce fait le modèle géométrique et son inverse. En effet, en alignant les corps opposés à une longueur égale (les quatre bras mesurant la même taille dans notre cas), nous transformons le système en un
paralléparallélogramme. Cette transformation apporte plusieurs relations internes utiles au système, liant les angles et les diagonales.
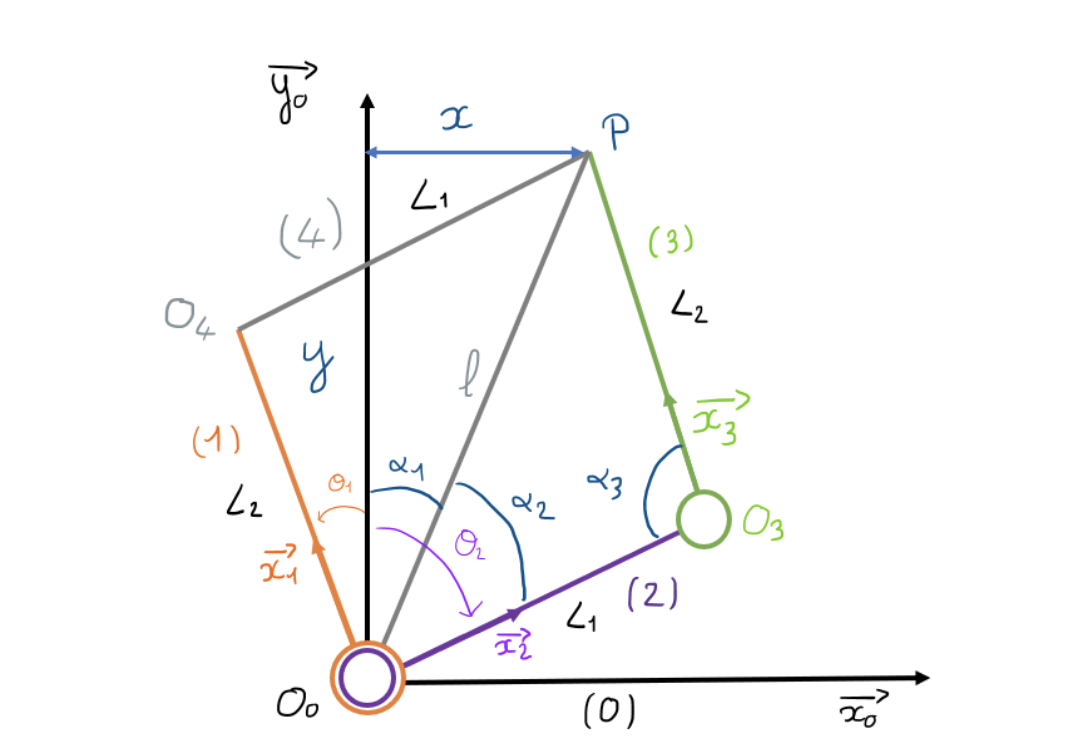
- Modélisation et Références du Système : Nous définissons un repère galiléen 𝑅0 = (𝑥0 , 𝑦0 , 𝑧0 ) associé au bâti (0). Le robot est composé de quatre bras : les bras 2 et 4 mesurant une longueur 𝐿1, tandis que les bras 1 et 3 ont une longueur 𝐿2. - Le bras 1 est en liaison pivot autour de l'axe (𝑂0, 𝑧0) avec le bâti. L'angle formé est noté
θθ1 = (𝑥0, 𝑥1) = (𝑦0, 𝑦1). - Le bras 2, aussi en liaison pivot autour de l'axe (𝑂0, 𝑧0) avec le bâti, a un angleθθ2 = (𝑥0, 𝑥2) = (𝑦0, 𝑦2). - Le bras 3 est en liaison pivot autour de l'axe (𝑂3, 𝑧0) avec le bras 2. L'angleαα3 = (𝑥2, 𝑥3) = (𝑦2, 𝑦3) est défini, avec le bras 3 restant horizontal et parallèle à l'axe 𝑥0. - Le bras 4, en liaison pivot autour de l'axe (𝑂4, 𝑧0) avec le bras 1, n'est pas visible dans notre modèle simplifié puisquen’n’intervenant pas dans nos calculs .
L'effecteur du robot se trouve au point P et a pour coordonnées (𝑥, 𝑦) dans ce système.
Cette modélisation permet de comprendre clairement la structure mécanique du robot et facilite la programmation et le contrôle de ses mouvements.
B - ModèModèle géomégéométrique direct
Dans notre projet robotique, nous avons élaboré un modèle géométrique direct qui se base sur des principes de trigonométrie fondamentaux, rendant sa détermination relativement simple. Ce modèle utilise des formules basiques pour calculer les positions du robot.
On rappelle que notre modèmodèle se base sur un paralléparallélogramme. 📐Or, dans un parallélogramme, les côtés opposés sont égaux et les angles adjacents sont complémentaires. De plus, les diagonales se coupent en leur milieu et forment des triangles rectangles avec les côtés du parallélogramme. Nous pouvons donc utiliser ces propriétés pour établir des relations entre les longueurs des bras .
Dès lors :
Pour un robot standard avec des bras de longueurs différentes, les coordonnées x et y de l'effecteur peuvent être exprimées comme suit :
| x = L1 sin( |
y = L1 cos( |
Cependant , nous avons spécifiquement choisi de travailler avec un losange, où ( L = L1 = L2 ). Cette approche réduit la complexité des calculs et permet une meilleure compréhension de la cinématique du robot.
Avec cette simplification, notre modèle géométrique direct se résume à des formules plus simples :
|
x = L (sin( |
y = L (cos( |
💭 Remarque :"Pour le dédétail des calculs, veuillez consulter le PDF intituléintitulé 'Calcul ModèModèle GéoméGéométrique', joint en annexe."
Nous avons pu valider notre modèmodèle géomégéométrique direct en utilisant SolidWorks. AprèAprès avoir conçconçu une version simplifiésimplifiée de notre robot et dédéfini des angles pilotes, nous avons simulésimulé plusieurs positions pour obtenir les coordonnécoordonnées x et y via le logiciel. La comparaison de ces rérésultats avec ceux calculécalculés par nos formules mathémathématiques a montrémontré une correspondance notable, validant ainsi la fiabilitéfiabilité de notre modèmodèle géomégéométrique.
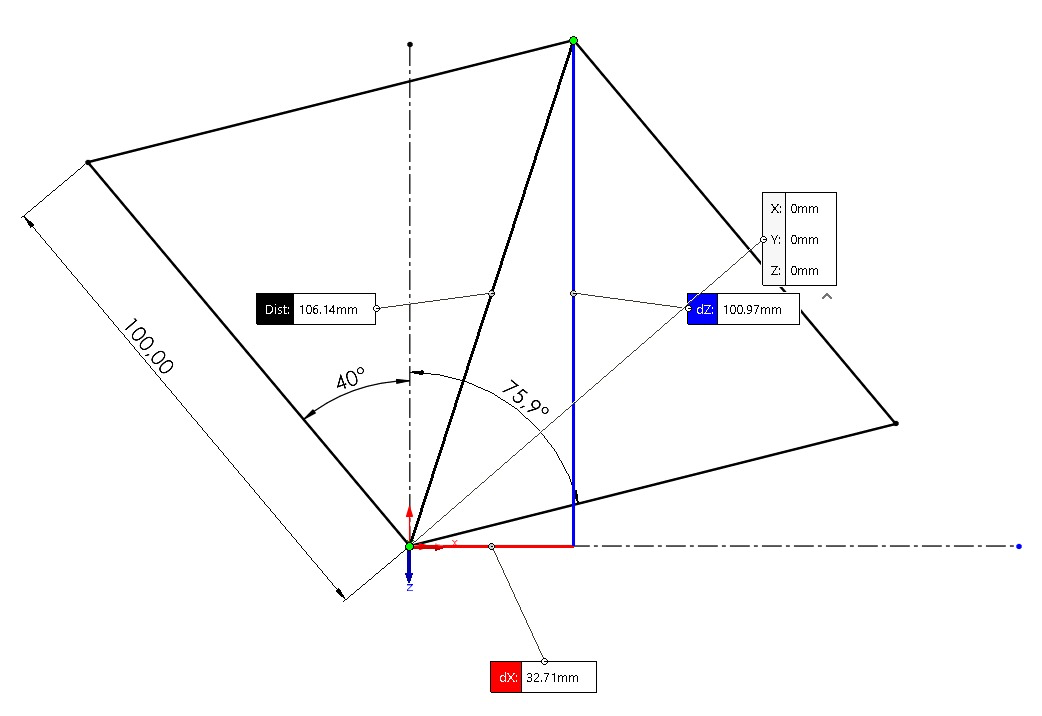
figure 14: capture d'éécran de notre teste du modèmodèle géomégéométrique direct sur SolidWorks
C- ModèModèle géomégéométrique Inverse :
L’L’élaboration du modèle géométrique inverse est une étape essentielle pour le contrôle précis de notre robot. Ce modèle nous permet de calculer les angles nécessaires aux moteurs pour positionner l'effecteur à un point spécifique (x, y) dans l'espace.
Pour commencer, nous avons établi l'angle αα1 en utilisant la fonction arctangente, qui est dérivée du rapport entre les côtés opposé et adjacent d'un triangle rectangle formé par les coordonnées de l'effecteur :
αα1 =Arctan(x/y)
Ensuite, nous avons appliqué le théorème de Pythagore au triangle rectangle ayant pour longueur 𝑥, 𝑦 𝑒𝑡 𝑙 pour déterminer la longueur de l'hypoténuse l en fonction des coordonnées x et y :
𝑙 = √√(x^2+y^2)
En utilisant la propriété fondamentale des triangles selon laquelle la somme des angles internes est égale à 180°180°, nous avons déduit une relation entre les angles αα3 et αα2:
αα3 = 180°180°-2*αα2 et αα2=90°90°-αα3/2
Enfin, grâce à la loi des cosinus ou la formule d'Al-Kashi, nous avons pu exprimer αα3 en termes des longueurs des bras L1 , L2 et de l’hypotél’hypoténuse 𝑙 :
αα3= arccos((L1^2+L2^2-𝑙^2)/(2 L1 L2))
Ces relations nous permettent de déterminer les angles des moteurs:
θθ1=αα2-αα1 et θθ2=αα2+αα1
Toutefois, grâgrâce à notre simplification du modèle par un losange; longueur 𝐿 = 𝐿1 = 𝐿2. On obtient les relations suivantes :
|
|
|
|
|
|
|
|
|
|
Avec ces formules, nous avons en main un système complet qui nous permet de calculer les angles des moteurs pour positionner précisément l'effecteur à un point (x, y) dans l'espace, en considérant les bras de longueur égale.
D - ModéModélisation de la translation :
Notre mécanisme de translation axiale s'appuie sur un agencement pignon-crémaillère. La crémaillère présente un diamètre de base Bbase 41,25 mm. En prenant en compte un module de conception m de 1,5, nous procédons au calcul du diamètre effectif Deff qui sera utilisé dans les calculs suivants .
- Le diamètre effectif est calculé comme suit : Deff = Bbase + 2,5 m=41,25+2,
5×5×1,5=45 mm
Le calcul du diamèdiamètre effectif s'appuie sur des donnédonnées initiales issues de nos premièpremières simulations réaliséréalisées sur SolidWorks, en particulier pour le mémécanisme pignon-crémaillècrémaillère. Il est important de noter que ces chiffres, bien que préprécis dans le cadre de nos simulations initiales sont susceptibles d'éévoluer et d'êêtre ajustéajustés au fur et àà mesure de l'avancement de notre projet et àà mesure que de nouvelles donnédonnées seront recueillies et analyséanalysées.
- Le lien entre le nombre de révolutions complètes Nrev du servomoteur Emax ES08A et l'angle de déplacement
θθ est donné par la relation :
Nrev=θθ/360°360°
La position verticale z de la plaque mobile peut être déduite à partir de θθ en utilisant l'équation : z=Nrev *Deff * pi ⟹
z=θθ/360°360° * Deff * pi
Ceci nous conduit aux expressions des modèles géométriques de translation axiale :
z=θθ/360°360° * Deff * pi ( modele direct)θθ=(360°360°*z)/(Deff * pi ) ( modèle inverse)
Ces équations nous fournissent un moyen précis pour établir la position verticale de la plaque en se basant sur l'angle de rotation du servomoteur et, à l'inverse, pour calculer l'angle nécessaire pour atteindre une position verticale déterminée.
B) conception CAO 🖥️✏️📐:
Nous passons maintenant àà la phase de modémodélisation des composants de notre robot. Nous utiliserons SolidWorks pour cette tâtâche, un outil de CAO parfait pour transformer nos plans en modèmodèles numénumériques. C'est une éétape importante pour rendre nos idéidées concrèconcrètes et fonctionnelles.
Notre crécréation robotique est une interpréinterprétation du robot pantographe, caractérisécaractérisée par une conception oùoù les axes de deux servomoteurs convergent, orchestrant les mouvements des bras et en conséconséquence, la trajectoire du stylo.
La structure du robot est articuléarticulée autour de trois sous-ensembles principaux:
-
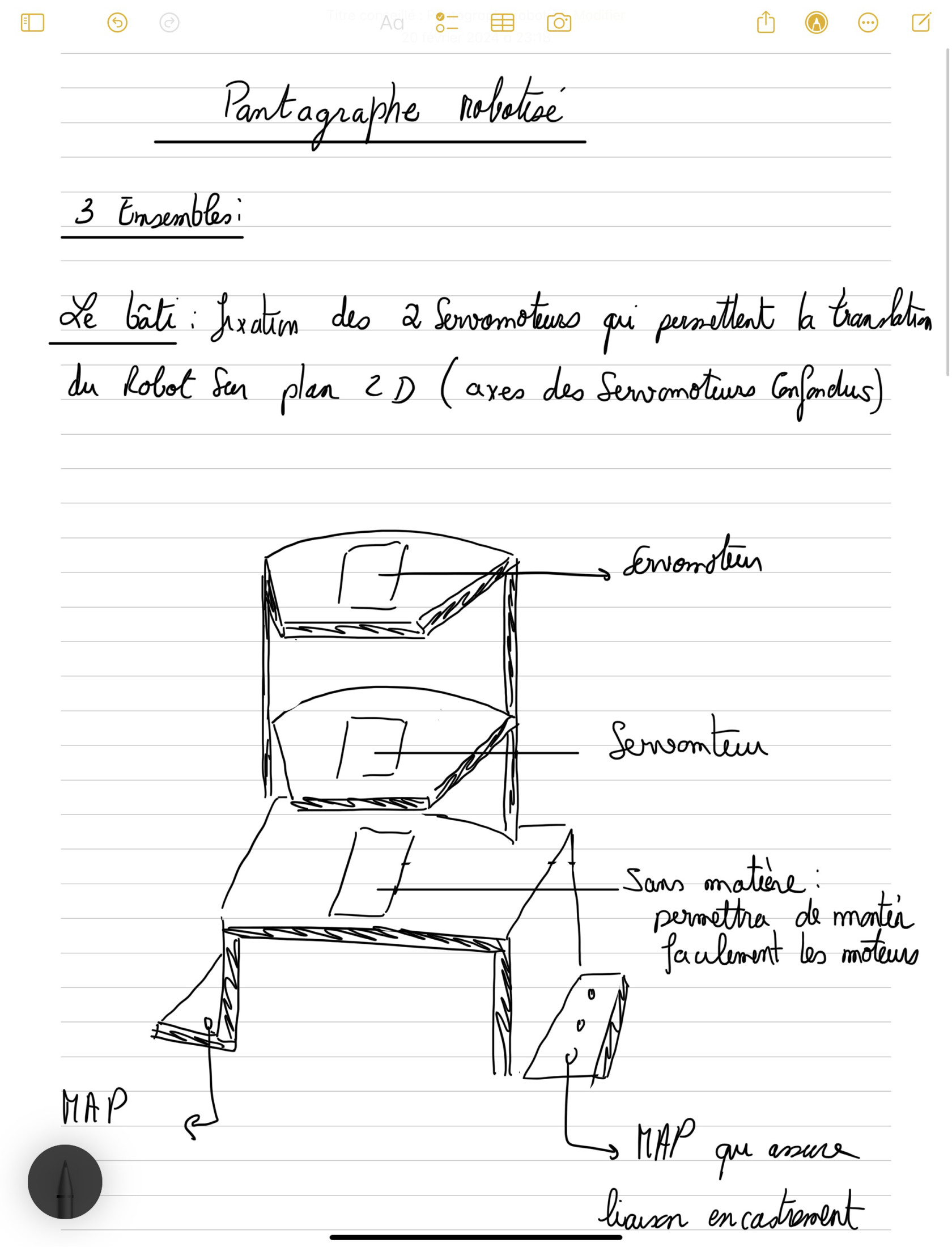
Le
bâbâti : Formant la fondation du robot, ce premier sous-ensemble estchargéchargé d'accueillir et de stabiliser les deux servomoteurs principaux. Ces moteurs sont essentiels pour actionner les mouvementslatélatéraux et longitudinaux,conféconférant au robot unecapacitécapacité de translationpréprécise sur le plan 2D. -
Les Bras et le Porte-Stylo : Ce sous-ensemble
repréreprésente les membres actifs du robot.AttachéAttachés aux servomoteurs, les brasarticuléarticulés du robot sont lacléclé de sacapacitécapacitéàà dessiner. Ils suivent avecfidélitéfidélité les instructions de mouvement pour guider le stylo sur la surfacedédiédédiée. , -
Le
MéMécanisme de Translation Verticale : Incorporant unsystèsystème de pignon etcrémaillècrémaillère, cetroisiètroisième sous-ensemble enrichit le robot d'unefonctionnalitéfonctionnalité verticale. Il permetàà la surface de dessin de s'éélever ou de s'abaisser, donnant au robot lafacultéfaculté de ponctuer le papier de dessins enpointillépointillés ou de lever le stylo entre les points,conforméconformément auxspéspécifications techniquespréépréétablies.
- IdéIdées CréCréatives pour la Conception des PièPièces 🎨🔩
 .
.
figure 14 : IdéIdée de bâbâti pour la modémodélisation
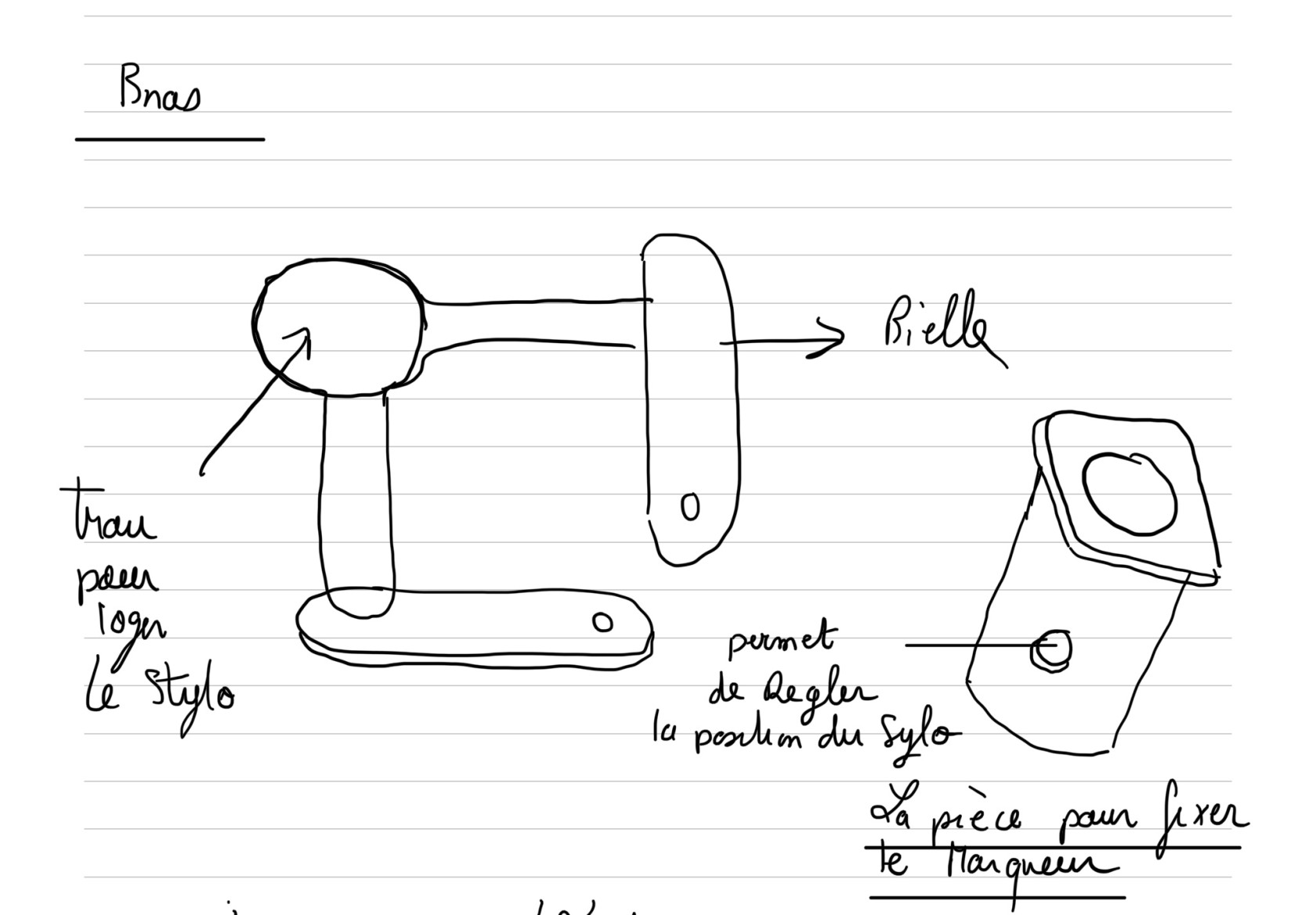
figure 15 : IdéIdée de bras pour la modémodélisation
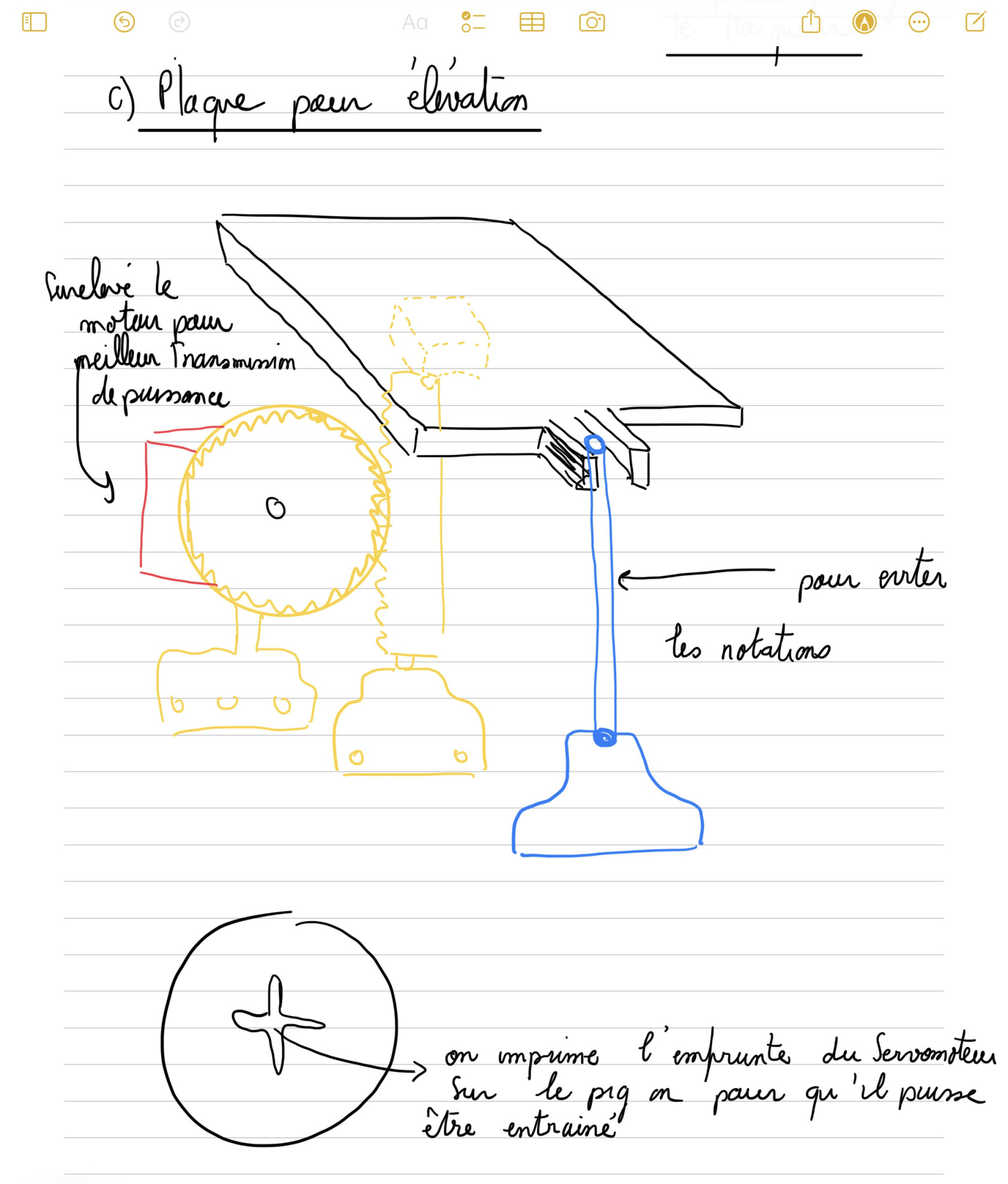
figure 16 : IdéIdée de plaque éléélévatrice pour la modémodélisation
- le DéDéveloppement des PièPièces 🛠️:
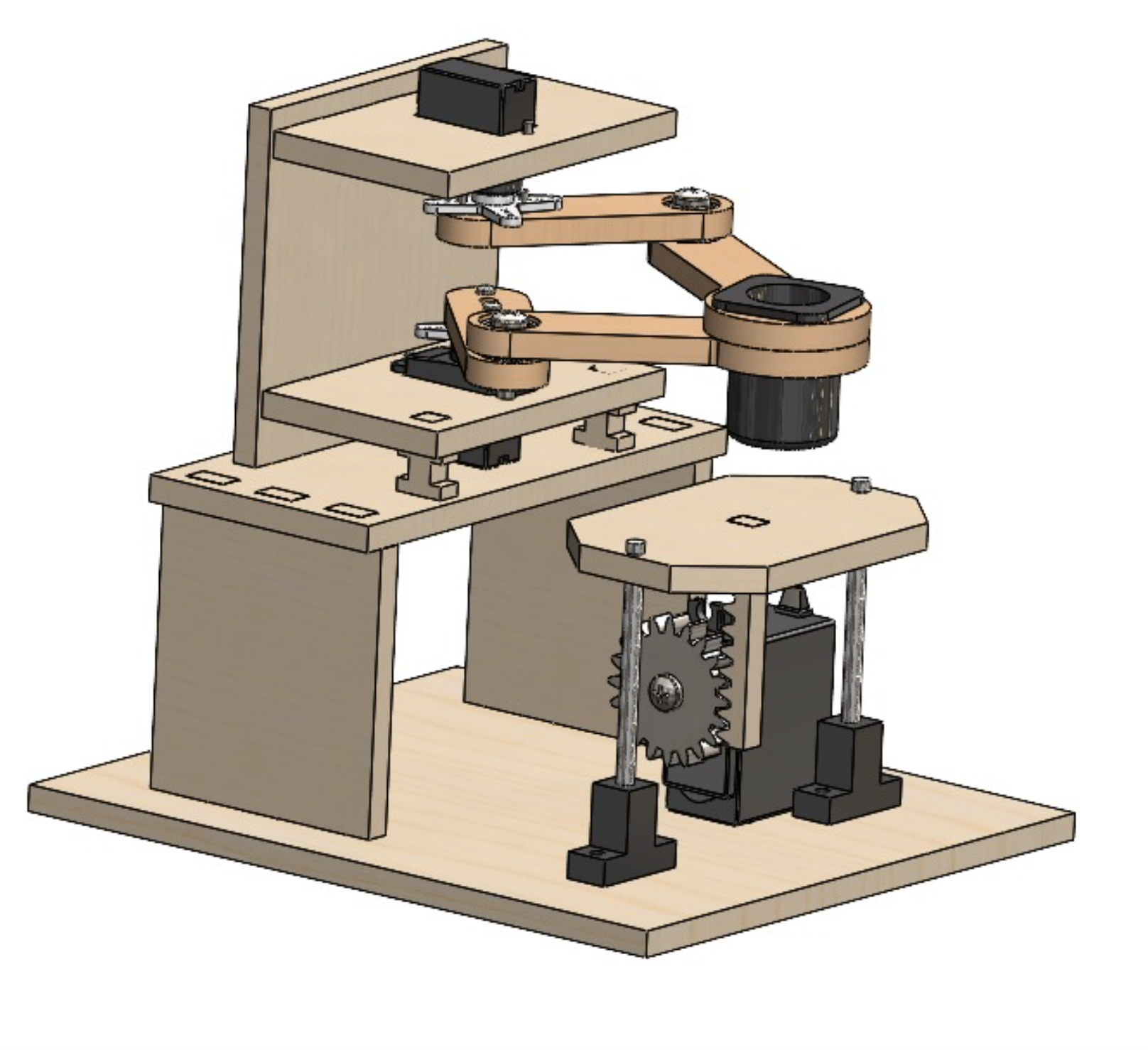
Figure 17 : Capture d’éd’écran de notre conception de robot sur solidWorks
A) BâBâtis :
Notre bâbâti est composécomposé de quatre pièpièces diffédifférentes. Nous avons créécréé des logements pour les deux servomoteurs grâgrâce aux dimensions qui nous ont étéété fournies. Notre bâbâti assure ainsi le maintien en position des deux servomoteurs grâgrâce àà des liaisons appuis-plan réaliséréalisées par un éépaulement. La mise en position est assuréassurée par des vis qui seront installéinstallées lors du montage de nos pièpièces.
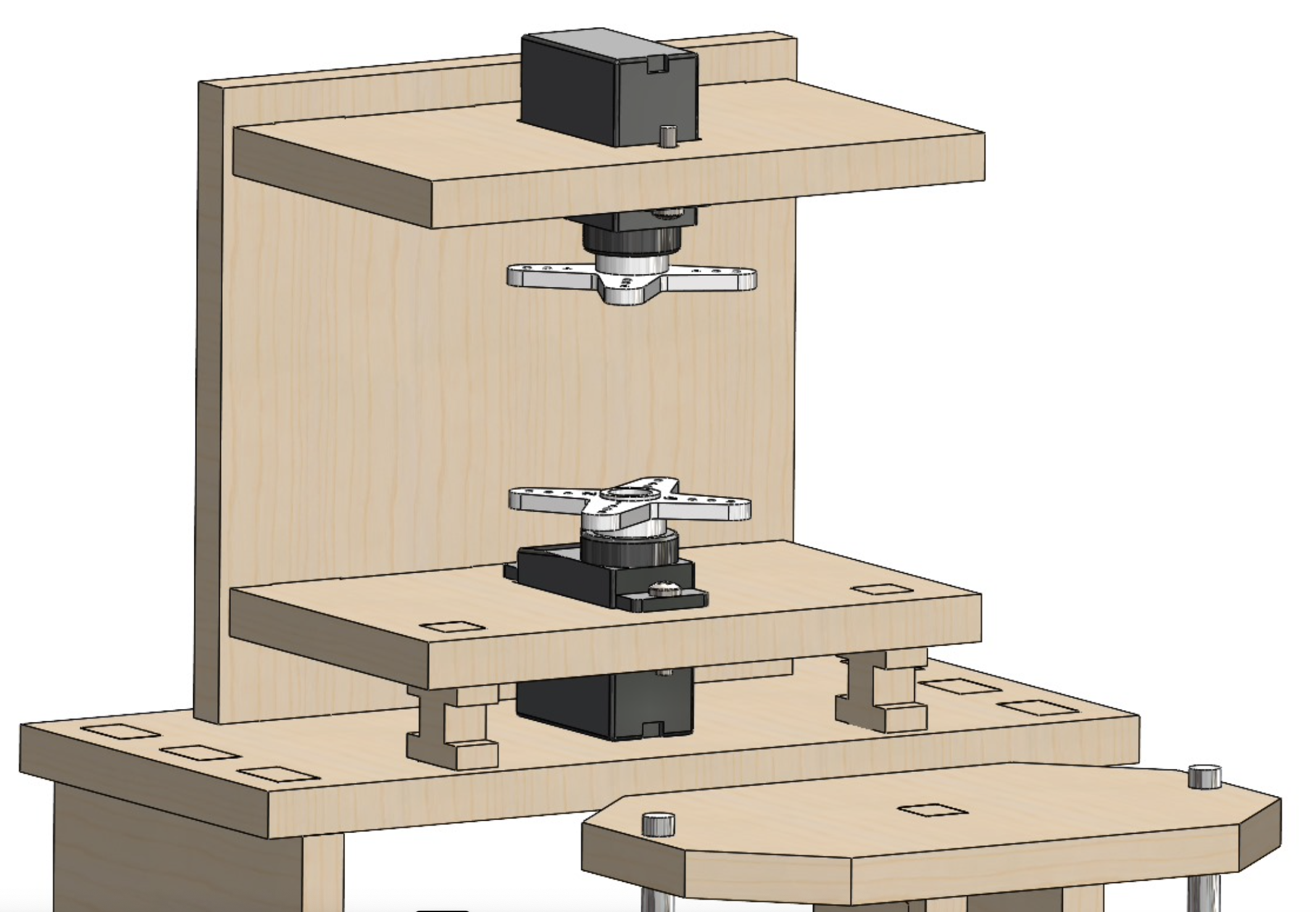
Figure 18 : Epaulement et montage des moteurs sur le bâbâti
B) Bras:
L'assemblage du bras de notre robot se compose de quatre pièpièces distinctes : deux demi-bras, l'un côtécôté moteur et l'autre côtécôté effecteur, ainsi qu'un support cylindrique qui nous permettra de loger notre marqueur. Pour assembler les deux demi-bras, nous utiliserons un roulement àà billes et un axe en mémétal afin d'assurer la liaison pivot.

Figure 19: assemblage des bras
- Demi-bras 1: (
cotécoté moteur)
Ce demi-bras est une bielle qui permet la liaison directe entre le servomoteur et le reste du bras robotique. Il est fixéfixé au servomoteur via un systèsystème de vis.De l’l’autre côtécôté de la pièpièce, un enlèenlèvement de matièmatière circulaire a étéété creusécreusé pour laisser de la place àà un roulement àà bille.
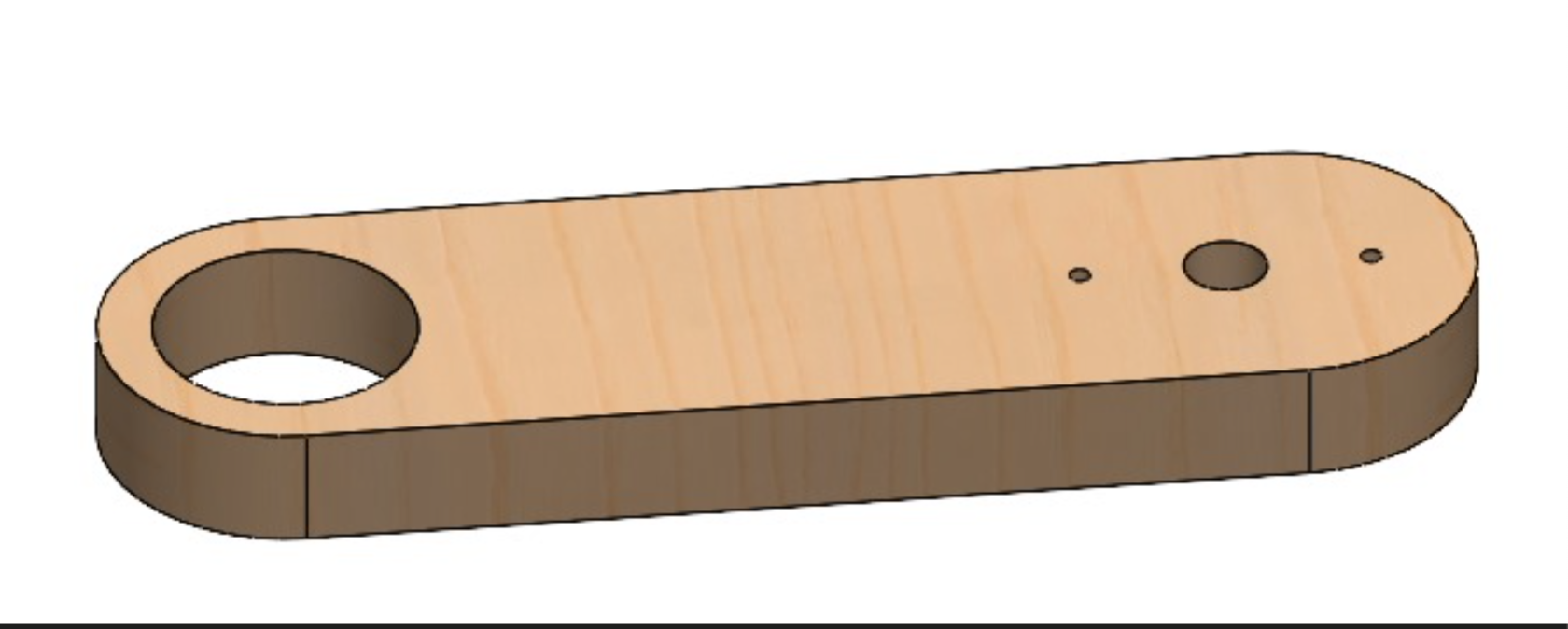
Figure 20 : demi-bras 1
- Demi-bras 2 : (cote effecteur)
Ce demi-bras est conçconçu pour tenir et manipuler l'effecteur, ici un marqueur.ÀÀ une extrémitéextrémité, ce demi-bras préprésente un creux compatible avec la liaison pivot, permettant une rotation fluide et un alignement préprécis avec le premier demi-bras. L'autre extrémitéextrémité est spéspécialement éélargie pour former un anneau, dans lequel est placéplacé le cylindre creux tenant le marqueur.
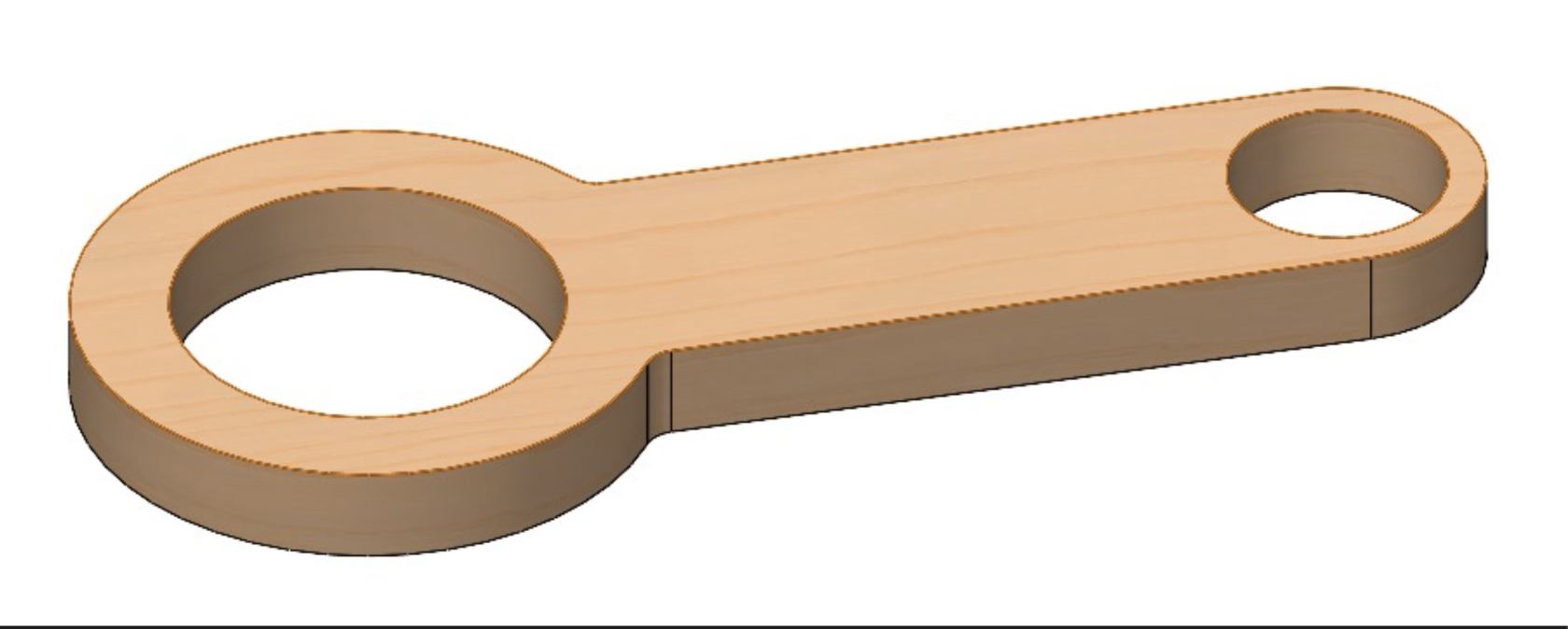
Figure 21 : demi-bras 2
💭 Remarque : La pièpièce mentionnémentionnée ici se trouve en deux exemplaires dans l'assemblage du robot. Les extrémitéextrémités en forme d'anneau de ces deux composants sont disposédisposées l'une sur l'autre, crécréant ainsi une superposition alignéalignée. Ces deux bras sont alors connectéconnectés l'un àà l'autre par l'interméintermédiaire d'une pièpièce cylindrique, le support du stylo , dont nous dédétaillons la conception et la fonction dans la suite de notre préprésentation.
- Support du stylo
Le support àà marqueur est constituéconstitué d’d’un cylindre creux et d’d’un rebord rectangulaire qui assure un contact appui plan avec l’l’anneau d’d’une des bielles, ce qui éévite que le support ne glisse.Il est essentiel que les bras puissent tourner autour de ce cylindre, d'oùoù la nécessiténécessité d'une liaison pivot avec un léléger jeu entre le cylindre et les deux demi-bras côtécôté effecteur. Sur le bord du cylindre, un trou a étéété aménagéaménagé pour permettre l'insertion d'un axe. Cet axe sert àà maintenir et ajuster la position du marqueur àà l'intéintérieur du support. Un éécrou fixéfixé sur cet axe garantira que le marqueur reste stable et en place dans le cylindre.
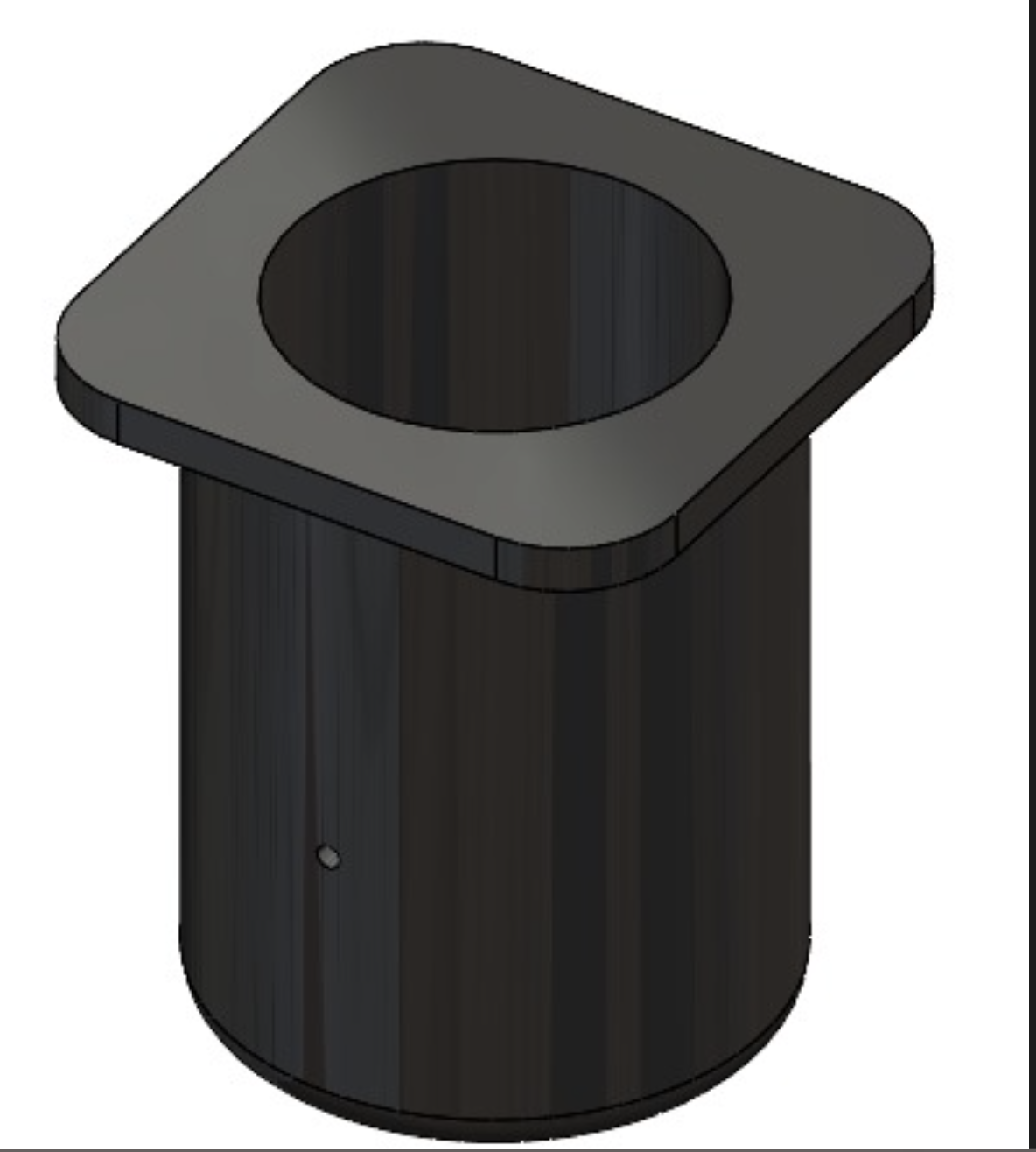
Figure 22 : Support du marqueur
C) Plaque montante:
Afin de soulever le stylo et exéexécuter les motifs de dessin spécifiéspécifiés dans notre cahier des charges, nous avons choisi d'impléimplémenter un mémécanisme de pignon-crémaillècrémaillère. Ce systèsystème est conçconçu pour éélever la plaque sur laquelle le dessin est effectuéeffectué. Pour la conception de ce mémécanisme, nous avons utiliséutilisé l'outil Toolbox de Solidworks, un choix stratéstratégique qui nous a permis de modémodéliser avec préprécision et efficacitéefficacité le systèsystème pignon-crémaillècrémaillère adaptéadapté àà nos besoins spéspécifiques tout en gagnant du temps . Cet outil nous a offert la flexibilitéflexibilité nénécessaire pour ajuster les paramèparamètres de conception .
Il est important de veiller àà la cohécohérence du module utiliséutilisé pour le pignon et la crémaillècrémaillère, car ils doivent impéimpérativement êêtre identiques pour assurer un fonctionnement correct et efficace. Pour notre projet, nous avons optéopté pour un module de 1,5. Ce choix garantit une compatibilitécompatibilité parfaite entre le pignon et la crémaillècrémaillère, essentielle pour une transmission de mouvement fluide et préprécise.
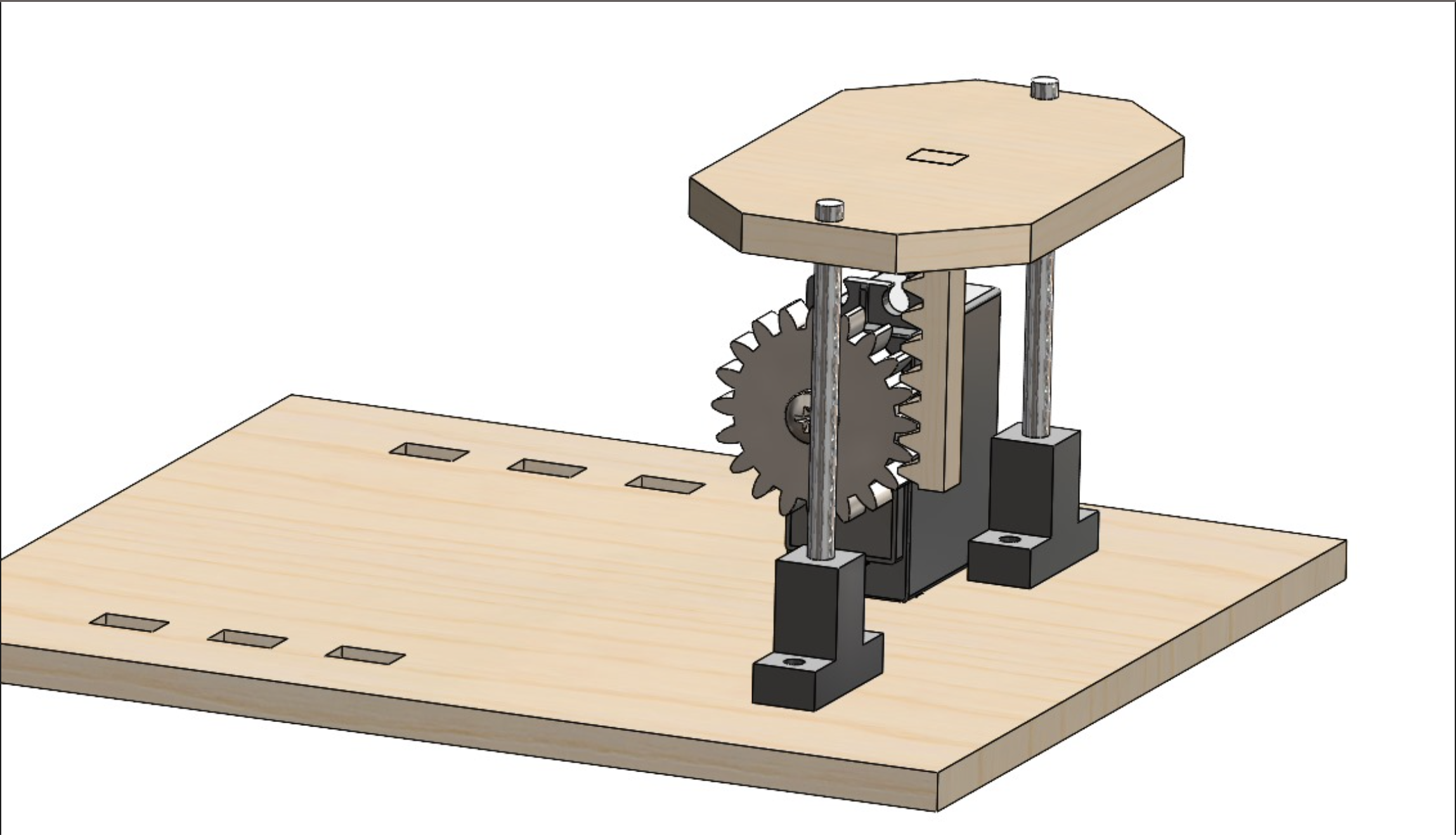
Figure 23 : plaque montante
Dans notre conception, nous avons soigneusement intégréintégré une encoche dans la plaque de dessin spéspécifiquement conçconçue pour y loger la crémaillècrémaillère (pour renforcer la fixation de la crémaillècrémaillère sur la plaque, nous préprévoyons d'ajouter des points de colle aux emplacements stratéstratégiques.)
Par ailleurs, pour garantir la stabilitéstabilité de la plaque de dessin, nous avons conçconçu une pièpièce supplésupplémentaire ( petit pied représentéreprésenté en noir sur la figure 21). Cette pièpièce est spéspécialement élaboréélaborée pour accueillir un axe .L'insertion de cet axe dans la pièpièce conçconçue assure un maintien ferme et stable de la plaque, une caractécaractéristique essentielle pour la préprécision et la qualitéqualité des dessins réaliséréalisés par le robot.
Enfin , pour maintenir en place l'ensemble des pièpièces précéprécédemment évoquéévoquées, nous allons dédécouper une
plaque sur laquelle nous allons assembler toutes ces pièpièces.
- Processus de Fabrication 🏗️⚙️
Nous avons choisi la dédécoupe laser pour fabriquer la majoritémajorité nos pièpièces. Cette dédécision dédécoule de plusieurs raisons. Tout d'abord, la dédécoupe laser offre une préprécision remarquable dans la réréalisation de pièpièces, permettant des finitions nettes et détaillédétaillées. De plus, elle est rapide et efficace, rendant le processus de fabrication plus rapide comparécomparé àà l'impression 3D, qui peut prendre plus de temps pour produire des objets complexes. La dédécoupe laser excelle éégalement dans la dédécoupe de matématériaux variévariés, offrant une flexibilitéflexibilité dans le choix des matématériaux adaptéadaptés aux besoins spéspécifiques du projet. En outre, elle est souvent plus ééconomique pour la production en sésérie de pièpièces, offrant une alternative rentable par rapport àà l'impression 3D, notamment pour des applications oùoù la soliditésolidité mémécanique et la préprécision sont essentielles.
Toutefois , nous avons optéopté pour l'impression 3D pour la fabrication des pieds qui servent de support àà notre plaque de dessin, ainsi que pour le support cylindrique destinédestiné àà accueillir le stylo. Cette dédécision est motivémotivée par la complexitécomplexité de la conception de ces pièpièces et leur éépaisseur importante , qui rendent leur fabrication difficile avec la dédécoupe laser disponible àà Polytech. L'impression 3D offre la flexibilitéflexibilité et la préprécision nénécessaires pour réréaliser ces composants aux formes spéspécifiques et aux dimensions requises.
Notre modémodélisation Solidworks est accessible en annexe dans le fichier zip "solidworksRobot.zip"
Nos fichiers DXF et SVG, préparépréparés pour la dédécoupe laser, sont éégalement disponibles dans "solidworksRobot.zip" .
C) Etude éélectrique ⚡🔌
Dans cette section, nous dédétaillons l'architecture éélectronique de notre robot, en mettant l'accent sur le matématériel, l'alimentation et la connectique.
- Le
matématérielutiliséutilisé:
Le cœcœur de notre systèsystème de commande est une carte Arduino Uno.Elle est configuréconfigurée pour contrôcontrôler trois servomoteurs : deux servomoteurs HS422 et un servomoteur Emax ES08A. De plus, nous intéintégrons trois boutons-poussoirs et un joystick pour assurer une interaction utilisateur intuitive, en particulier pour la commande manuelle du stylo. La visualisation de l'éétat du systèsystème et des modes de fonctionnement est rendue possible par l'utilisation de LED : deux pour signaler l'activation des fonctions principales et une troisiètroisième pour indiquer le type de trait (continu ou pointillépointillé). Les connexions éélectriques entre ces composants sont éétablies àà l'aide d'une plaque de prototypage.
- L'alimentation:
Le systèsystème robotique est alimentéalimenté directement par une carte Arduino Uno, car les besoins en tension et en courant sont compatibles avec ses capacitécapacités ( suffisamment faibles). Pour garantir une source d'éénergie stable et fiable, nous utiliserons le chargeur standard de l'Arduino, branchébranché via sa prise jack, assurant ainsi le fonctionnement optimal de notre robot.
- Connectique des
ÉléÉlémentsààl’l’Arduino:
Le tableau ci-dessous rérécapitule la connexion des divers composants aux pins correspondants de la carte Arduino Uno :

- Le joystick:
Le joystick est un composant cléclé pour la deuxièdeuxième fonctionnalitéfonctionnalité attendue, àà savoir le contrôcontrôle manuel du dédéplacement du stylo dans un carrécarré de 5 cm de côtécôté. Il dispose de trois sorties : un bouton poussoir et deux potentiomèpotentiomètres fournissant des valeurs analogiques entre 0 et Vcc. Ces valeurs sont traduites en pourcentages de vitesse pour chaque axe, variant de -100% àà +100%, permettant ainsi un contrôcontrôle préprécis et réréactif du mouvement du stylo.
SchéSchémaéélectrique:
Pour la réréalisation du schéschéma éélectrique et le câcâblage de notre solution robotique, nous avons choisi d'utiliser le logiciel Tinkercad. Cet outil en ligne s'est révélérévélé êêtre un choix judicieux. En effet, le logiciel offre une large gamme de composants éélectroniques virtuels qui peuvent êêtre facilement glisséglissés et déposédéposés dans le schéschéma, permettant ainsi une repréreprésentation préprécise de notre configuration matématérielle.
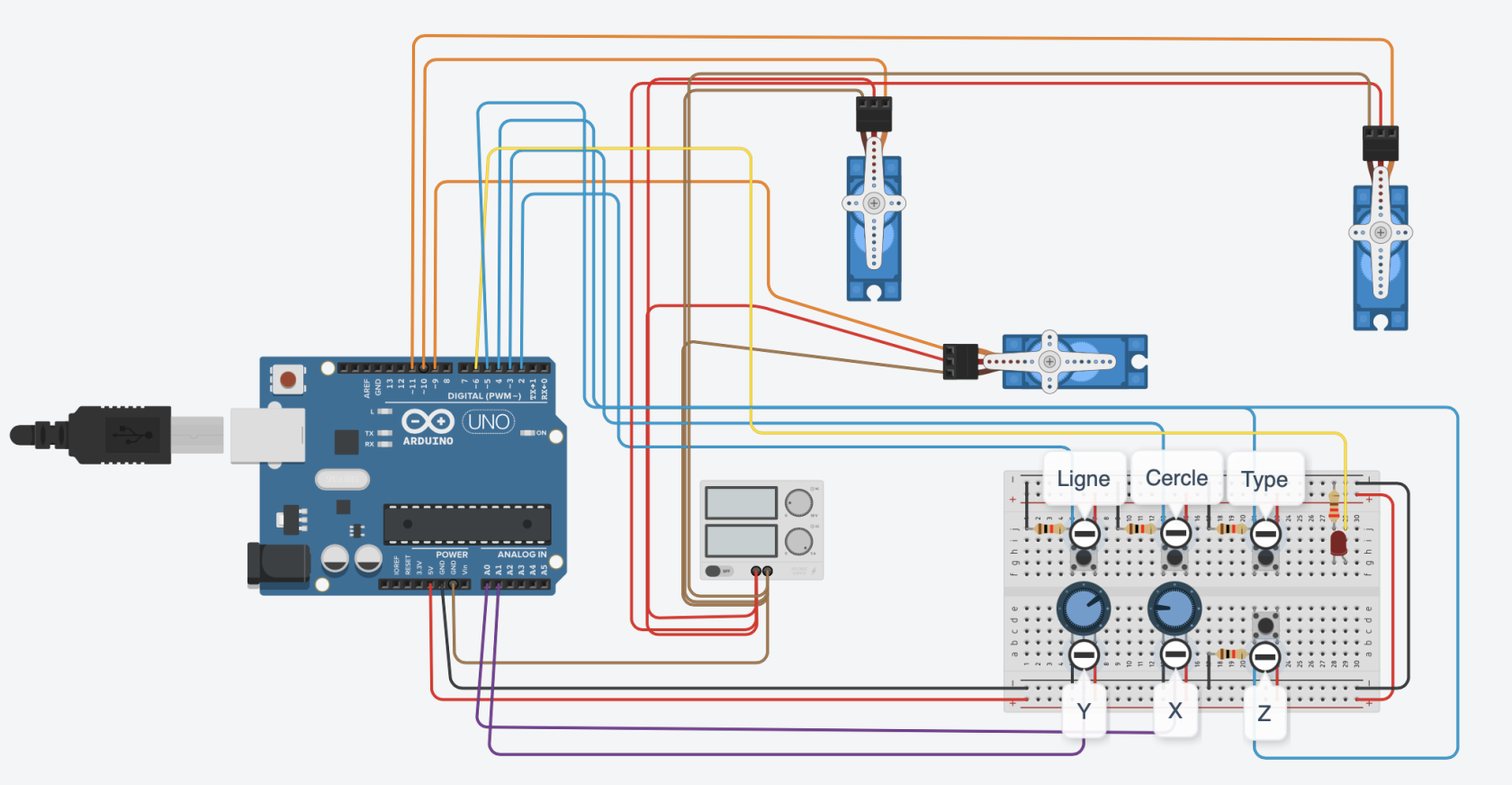 figure 15: Illustration du
figure 15: Illustration du câcâblage de notre robot
💭 Remarque : Ici ,le joystick est imitéimité avec deux potentiomèpotentiomètres et un bouton-poussoir, en raison de l'absence de joystick dans le logiciel. Nous avons éégalement inclus un bloc d'alimentation temporaire pour tester la conformitéconformité éélectrique du circuit, qui ne sera pas inclus dans le montage final.
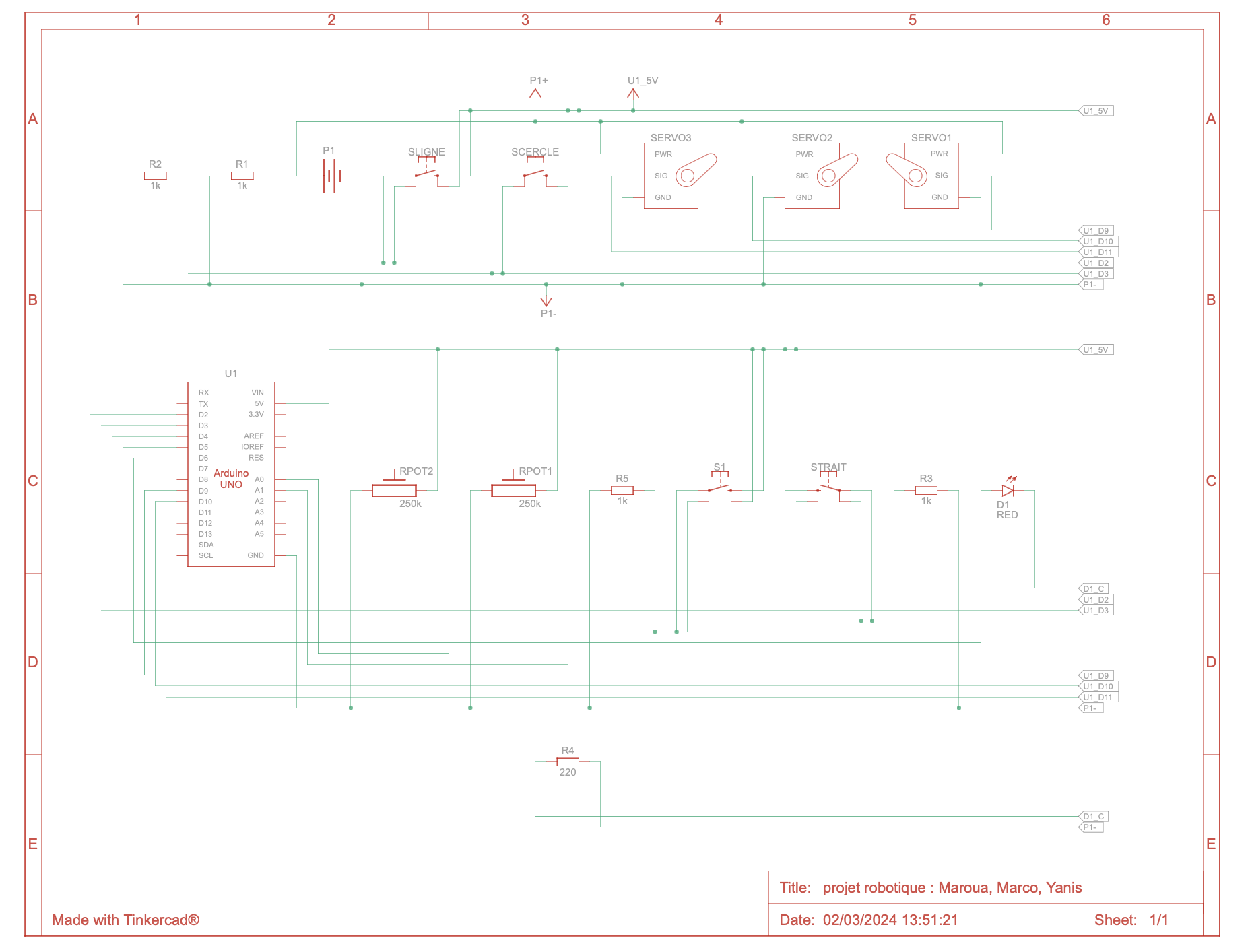 figure 16:
figure 16: SchéSchéma éélectrique de notre robot
D) Algorithmes de commande 📊💻
- Les
BibliothèBibliothèquesutiliséutilisées:
La bibliothèbibliothèque `Servo.h` est un composant essentiel de l'environnement de dédéveloppement Arduino, spéspécialement conçconçue pour la commande des servomoteurs. Cette bibliothèbibliothèque intèintègre un ensemble de fonctions destinédestinées àà simplifier la gestion des signaux PWM, qui sont important pour le contrôcontrôle préprécis de la position et de la vitesse des servomoteurs. Parmi les fonctions offertes par `Servo.h`, on retrouve :
- `attach()` : pour lier un servomoteur àà une broche spéspécifique.
- `write()` : pour dédéfinir la position du servomoteur en degrédegrés.
- `read()` : pour lire la position actuelle du servomoteur.
- `writeMicroseconds()` : pour un contrôcontrôle plus fin en spéspécifiant la durédurée de l'impulsion.
- `detach()` : pour libélibérer la broche associéassociée au servomoteur.
- 'pinMode()' : pour donner le mode d’entréd’entrée ou de sortie de la broche spécifiéspécifiée.
GrâGrâce àà cette bibliothèbibliothèque, il est possible de gégérer simultanésimultanément plusieurs servomoteurs de manièmanière autonome, ce qui est indispensable pour la complexitécomplexité de notre projet.
DéDéveloppement d'algorithmes secondaires :
Notre programme intèintègre diverses fonctions secondaires qui permettent de faire fonctionner les fonctions principales.
- Une fonction de
dédétermination descoordonnécoordonnées actuellesbasébasée sur les angles des servomoteurs,conforméconformément aumodèmodèlegéomégéométrique du robot. - Une fonction de calcul des angles requis pour les servomoteurs afin d'atteindre un point cible, suivant le
modèmodèlegéomégéométrique inverse. - Une fonction
spéspécifique pour localiser le point le p lus proche sur un cercle de rayon 2,5 cm,centrécentré sur la surface de travail, par rapportàà la position actuelle du stylo. - Une fonction de calcul du point de
dédépart optimal pour tracer une ligne de 5 cm de longueuràà l'intéintérieur d'uncarrécarré de 5 cm decôtécôté. - Une fonction d'estimation de l'intervalle d'angles possibles pour les segments de 5 cm
dédébutant au point actuel, tout en restant dans les limites ducarrécarréprédéprédéfini. - Une fonction de commande qui ajuste la hauteur de la plaque de dessin, permettant ainsi au stylo de toucher ou de se retirer de la surface, facilitant de ce fait la
crécréation de motifs continus ou enpointillépointillés.
- Le fonctionnement
génégénéral de notre algorithme :
La logique centrale de notre programme est conçconçue pour réréagir aux signaux des boutons poussoirs, initiant ainsi des actions prédéprédéfinies correspondantes.
- Fonction de Dessin de Cercle :
La premièpremière opéopération programméprogrammée est le dessin d'un cercle. Cette fonction dédébute par la localisation du point initial du cercle. Une fois ce point identifiéidentifié, elle positionne le stylo pour dédébuter le tracétracé et entreprend ensuite le parcours circulaire, complécomplétant un tour complet de 360 degrédegrés.
- Fonction de TraçTraçage de Ligne :
La seconde fonction a pour objectif de tracer une ligne droite de 5 cm àà l'intéintérieur d'une zone carrécarrée de dimensions éégales. Le programme dirige d'abord l'effecteur vers le point de dédépart le plus appropriéapproprié àà l'intéintérieur de ce carrécarré. Il utilise ensuite une routine secondaire pour génégénérer une orientation aléaléatoire, mais admissible pour le tracétracé, avant de procéprocéder àà l'exéexécution du tracétracé de la ligne.
- Fonction de ContrôContrôle Manuel :
La troisiètroisième fonctionnalitéfonctionnalité offre un contrôcontrôle manuel du mouvement du stylo via un joystick. Les signaux issus des potentiomèpotentiomètres du joystick sont convertis en un pourcentage de vitesse, qui peut varier de -100% àà 100% pour les deux axes du plan.
Enfin, une fonction de navigation autonome est implémentéimplémentée pour dédéplacer le robot vers un point cible prédéterminéprédéterminé. Cette fonction calcule les angles nénécessaires pour chaque servomoteur afin de diriger préciséprécisément le stylo vers le point désignédésigné.
Notre algorithme est entièentièrement accessible dans le document joint, intituléintitulé "code robot maranis.ino".
Le pseudo code de notre programme est éégalement accessible dans le document joint, intituléintitulé "Les diffédifférents pseudo-codes du programme.pdf"
E) Test de notre modèmodèle éélectrique-informatique ⚡🖥️
Pour valider notre modèmodèle éélectrique et informatique, nous avons effectuéeffectué une simulation sur le simulateur Arduino Wokwi. Les rérésultats se sont révélérévélés concluants : les servomoteurs réréagissent conforméconformément àà nos attentes, en réréponse aux signaux des boutons poussoirs et du joystick en mode manuel. Cette simulation est accessible ici, permettant ainsi de tester et d'expéexpérimenter notre conception directement.
Journal de Bord - ÉÉvolution du Projet Robotique 🤖
07/02/2024:
- Formation des Groupes : Les
ééquipes ontétéétécréécréées, favorisant une bellediversitédiversité decompécompétences et d'expéexpériences. - Brainstorming :
SéSéance intense de brainstorming en groupe. Desidéidéesvariévariées ontétéétéproposéproposées, allant de concepts innovantsàà des applications pratiques pour le robot. - Choix des
IdéIdées : Avec tant d'idéidéesintéintéressantes, ladifficultédifficulté principaleéétait de se concentrer sur les plusréréalisables. Trouver un consensus a pris du temps mais aétéété enrichissant. Heureusement, l'orientation des professeurs aétéété cruciale; ils nous ontguidéguidés pourééviter de tomber dans despièpièges ou de concevoir des prototypesirréirréalistes. - Planification Initiale : La mise en place d'un plan d'action initial a
étéété un peu chaotique🚨, avec plusieurs opinions sur la directionàà prendre.AprèAprès discussion, nous avonsdécidédécidé de fusionner certainesidéidées pourcrécréer un concept de robot pluscohécohérent etréréalisable. Nous avons ainsiéétabli un plan d'action plusstructuréstructuré pour la prochaineséséance, en se concentrant sur des objectifsspéspécifiques.🚀
💡 Note pour la Prochaine SéSéance
- Se concentrer sur l'
éélaboration d'un prototype de base pour le robot avec calculspréprécis desmodèmodèlescinécinématiques. - Affiner les
rôrôles au sein de l'ééquipe pour uneefficacitéefficacité accrue.
21/02/2024:
🔧 RéRépartition des TâTâches Aujourd'hui, nous avons réréparti les tâtâches pour booster notre efficacitéefficacité. Tandis qu’qu’un travaillait sur la modémodélisation CAO sur SolidWorks, les autres se sont concentréconcentrés sur le modèmodèle éélectronique pour Arduino et la crécréation du code informatique pour assurer les mouvements adéadéquats du robot.
-
ÉÉlectronique et Informatique- La partie
éélectronique-informatique est maintenantréaliséréalisée et fonctionnelle. Un grand pas en avant pour notre projet !
- La partie
-
RéRéflexion sur laCréCréation desPièPièces- Nous avons
décidédécidé desmatématériauxàà utiliser et de l'éépaisseursouhaitésouhaitée pour nospièpièces. - Les mesures
cléclés, comme la longueur des bielles formant le bras et dubâbâti, ontétéétédéterminédéterminées. PremièPremièreexpéexpérience avec la machineààdédécoupe laser. Nous avonsidentifiéidentifié certaines contraintes : principalement, le laser est plusadaptéadapté pour graver que pour faire de gros trous, pourééviter d'enflammer lematématériau.- Nos
pièpièces serontconçconçues pour s'emboîemboîter,àà lamanièmanière des petitesboîboîtesààidéidées du FabLab, avec des encoches pour faciliter la fixation.
- Nous avons
-
Retour sur le
ModèModèleGéoméGéométrique- Moment de discussion enrichissant avec le professeur
àà propos de nos calculsgéomégéométriques. Cetterérévision nous a permis d'affiner notre approche.
- Moment de discussion enrichissant avec le professeur
🔜 Prochaines ÉÉtapes
-
- Notre objectif pour la prochaine
séséance est d'avoirterminéterminé lamodémodélisation afin de la soumettre aux professeurs pour validation. - Nous envisageons de commencer la fabrication des
pièpièces avec ladédécoupe laser.
- Notre objectif pour la prochaine
29/02/2024:
🔍 ModèModèle GéoméGéométrique sur SolidWorks:
Nous avons testétesté et validévalidé notre modèmodèle géomégéométrique direct sur SolidWorks.
Discussion et Solution avec le Professeur 🗣️
Nous avons eu une discussion productive avec notre professeur sur la façfaçon de fixer notre robot, éétant donnédonné que nous ne pouvons pas le fixer directement au sol. AprèAprès un brainstorming constructif, nous avons trouvétrouvé une solution ingéingénieuse : crécréer une plaque qui servira de support stable pour le robot, oùoù il pourra êêtre fixéfixé àà l'aide d'une MAP .
Finalisation et Assemblage Virtuel des PièPièces
Nous avons finaliséfinalisé la conception des diffédifférentes pièpièces sur SolidWorks et commencécommencé l'assemblage virtuel. Cela nous a donnédonné une premièpremière vision concrèconcrète de la façfaçon dont les pièpièces s'emboîemboîteront dans la réalitéréalité.
Prochaine ÉÉtape : Fabrication RéRéelle 🏗️
Notre objectif est d'avoir déjàdéjà fabriquéfabriqué nos pièpièces avec la dédécoupe laser et l'imprimante 3D pour la prochaine session.En effet, notre conception inclut beaucoup de pièpièces diffédifférentes, ce qui signifie un temps de fabrication assez long. On veut s'y prend àà l'avance pour ne pas êêtre pris de court et assurer une progression fluide du projet.
Fabrication et montage du robot :
Nous avons consacré la troisième séance à la fabrication des différentes pièces de notre robot. Pour garantir que notre plaque verticale soit bien droite, nous avons ajouté une autre plaque afin de nous assurer que nos deux axes métalliques soient parfaitement parallèles.

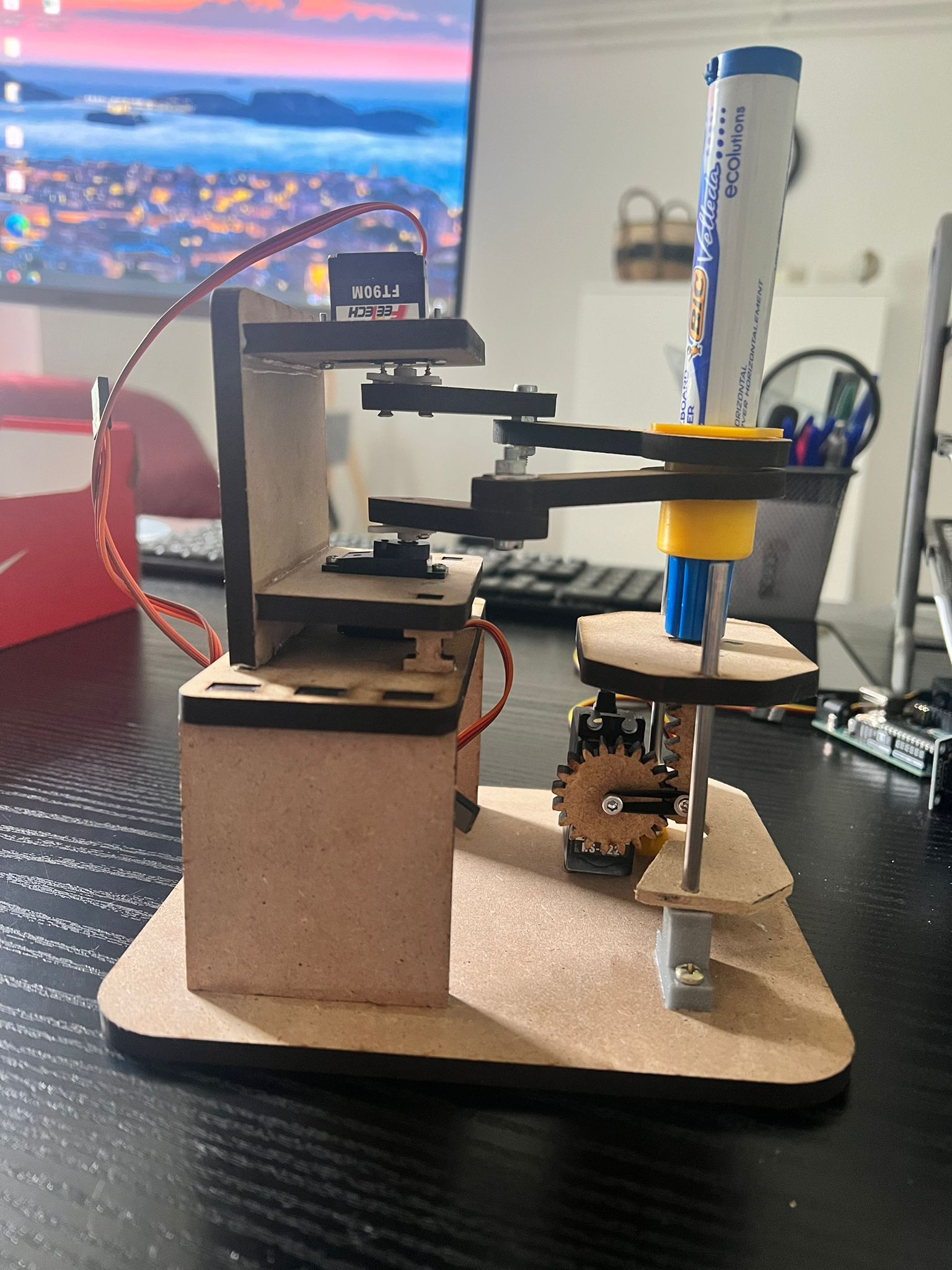
Lors de l'exécution de notre code, nous avons constaté que nos bielles ne se déplaçaient pas comme prévu. Cependant, la translation selon l'axe Z, assurée par la plaque, fonctionnait parfaitement. Ce dysfonctionnement était dû à la grande défectuosité des petits servomoteurs qui contrôlaient le mouvement des bielles, présentant une erreur d'environ 70 % par rapport aux performances attendues.
Malheureusement, notre montage ne permettait pas simplement de remplacer ces moteurs par des plus grands. Néanmoins, nous n'avons pas baissé les bras et avons décidé de repartir de zéro afin de concevoir un modèle nous permettant d'utiliser de grands servomoteurs pour les bras de notre robot et un petit servomoteur pour le mouvement de translation.
Proposition de réalisation :
Principe :
Pour ce nouveau robot, l'idée est de tout aligner de manière à ce que nos plaques puissent supporter le poids des servomoteurs tout en minimisant le gaspillage. Nous avons réutilisé les mêmes pièces et retiré celles qui n'étaient plus nécessaires. Nous avons donc enlevé la partie supérieure de notre ancien robot tout en conservant les mêmes bras. Ensuite, nous avons envisagé de réduire la taille des deux pattes qui soulevaient le robot afin de n'utiliser que le palonnier du petit servomoteur pour le mouvement de translation de la plaque, ce qui nous donne approximativement :

Schéma cinématique :
Avantages :
Utiliser les servomoteurs les plus précis pour le mouvement des bras et simplifier le montage de l’ancien robot.
Conception détaillée de notre robot :
1A) Calcul mécanique :
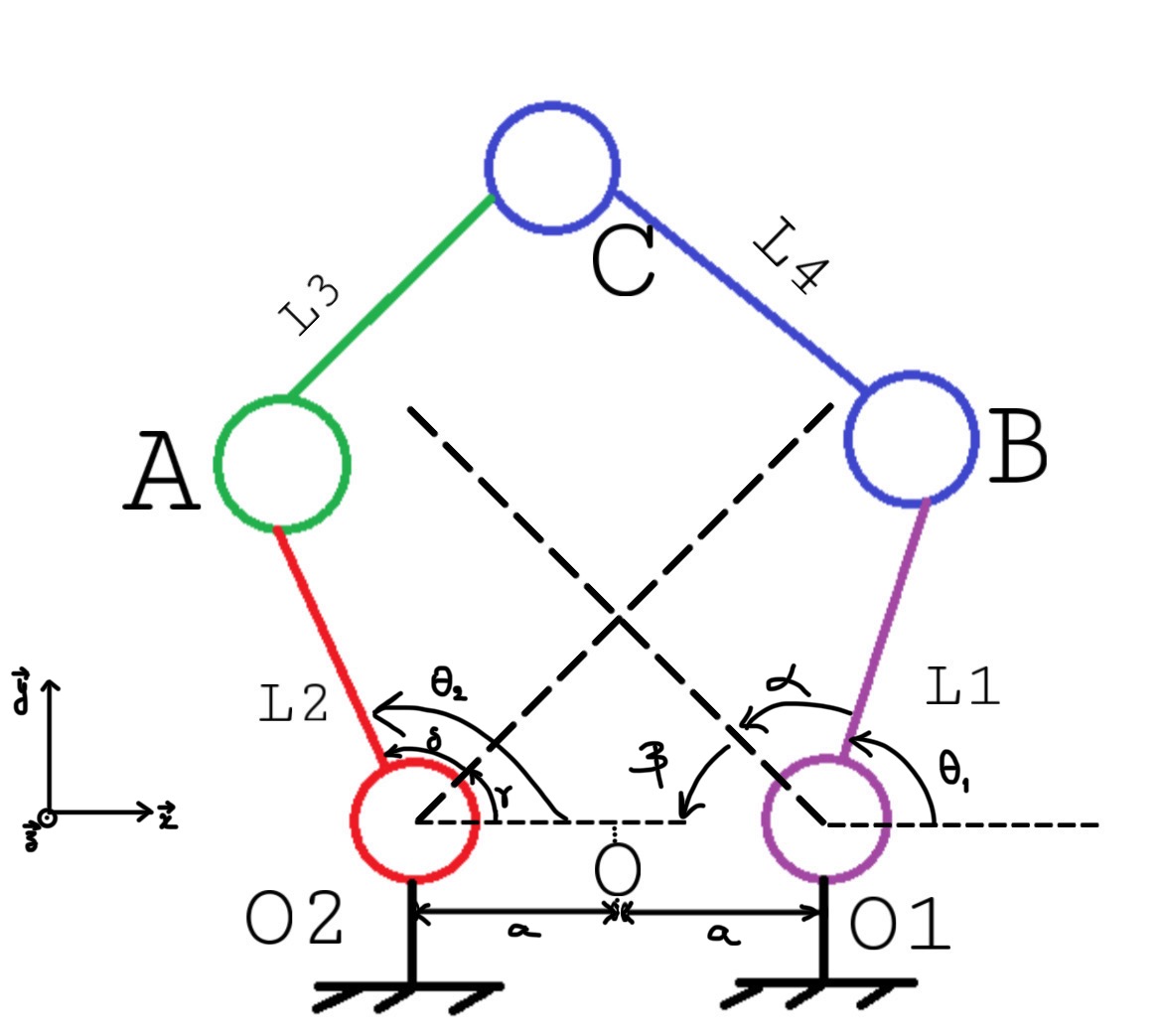
En travaillant sur les deux triangles O1BP et O2AC (avec P le point d’intersection des deux droites BC et celle qui passe par O1), nous avons pu déterminer les différents paramètres :
Grace à la formule d’Al Kashi on a :
α = arcos((l12 – l42 + O1P2)/(2L1*OP1)) avec OP1 = √((-a+x)^2+y^2)
β = arctan(y / (a-x))
θ1= π – (α - β)
δ = arcos( (l22 – l32 + O2C2)/ 2*l2*O2C) avec O2C= √(a+x)2-y2
et ϒ = arctan (y/(a+x))
Donc θ2 = δ + ϒ
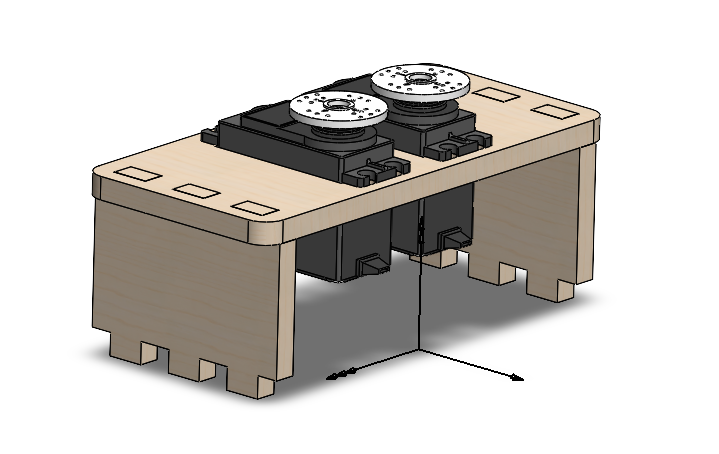
2B) Conception CAO
La structure de notre nouveau robot est constituée de trois sous-ensembles :
Le bâti : cette fois-ci moins grand, il accueille les deux grands servomoteurs. Ces moteurs sont essentiels pour actionner les mouvements latéraux et longitudinaux, conférant au robot une capacité de translation précise sur le plan 2D.
Les bras et le porte-stylo.
Le mécanisme de translation verticale.
Le développement des pièces :
1)Bâti :
Notre bâti est composé de deux pièces différentes. Sur la plaque horizontale nous avons créé des logements pour les deux servomoteurs grâce aux dimensions qui nous ont été fournies. Notre bâti assure ainsi le maintien en position des deux servomoteurs grâce à des liaisons appuis-plan réalisées par un épaulement. La mise en position est assurée par des vis qui seront installées lors du montage de nos pièces.
2 2) Bras :
L’assemblage des bras de notre robot reste identique à celui du précédent modèle, c’est-à-dire composé de quatre pièces distinctes : deux demi-bras, l’un côté moteur et l’autre côté effecteur, ainsi qu’un support cylindrique destiné à accueillir notre marqueur. Pour assembler les deux demi-bras, nous utiliserons un roulement à billes et un axe en métal afin d'assurer une liaison pivot.

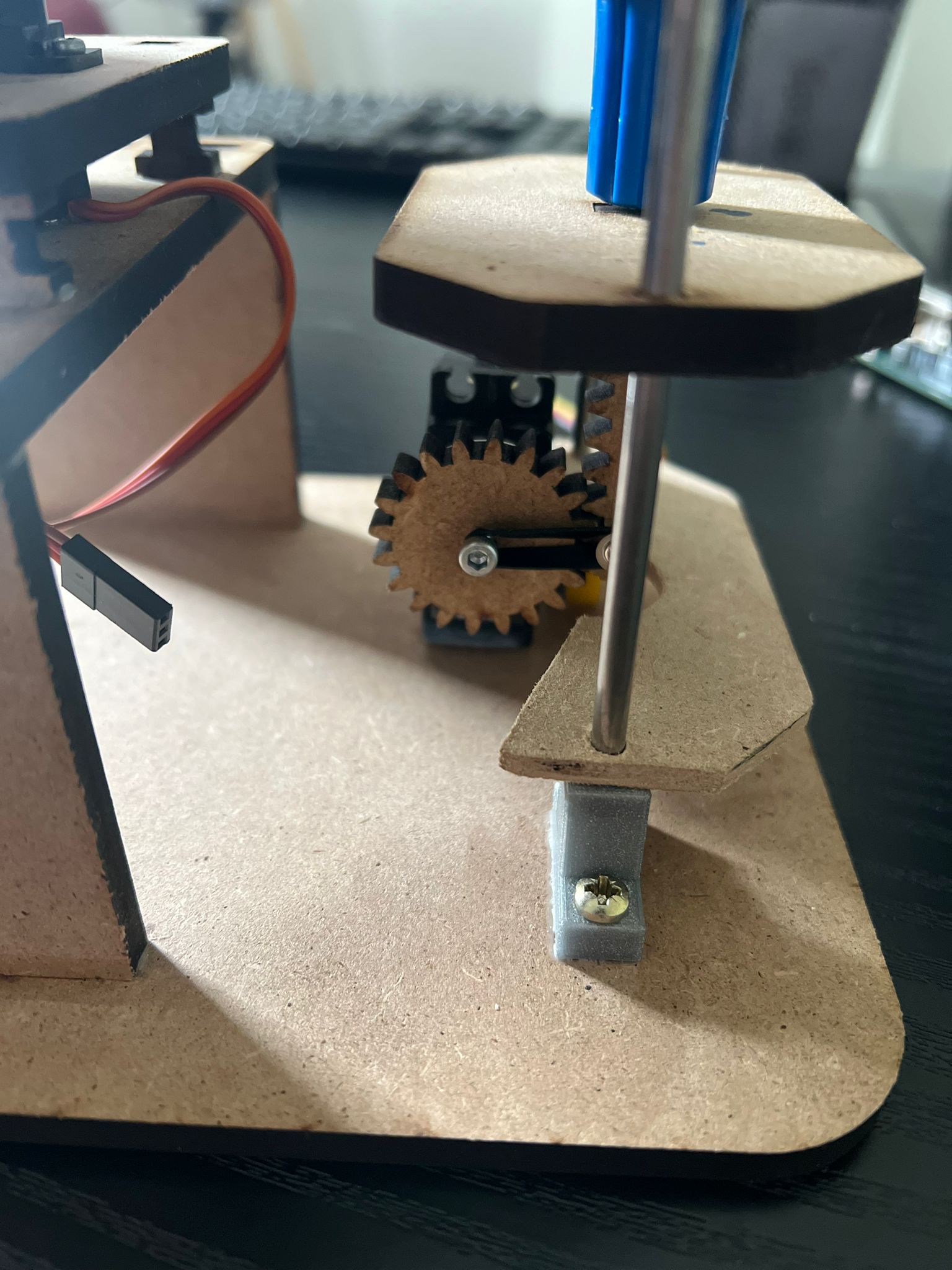
2 3) Plaque montante:
Pour réaliser la translation selon l'axe Z, nous avons utilisé un petit servomoteur monté directement sur une plaque horizontale, maintenue en place par deux axes parallèles.

- Processus de Fabrication 🏗️⚙️
Le processus de fabrication reste le même, nous privilégions encore la découpe Laser pour les mêmes raisons citées précédemment avec quelques pièces fabriquées avec l’impression 3D
C) Etude électrique :
L’étude électrique est la même que précédemment.
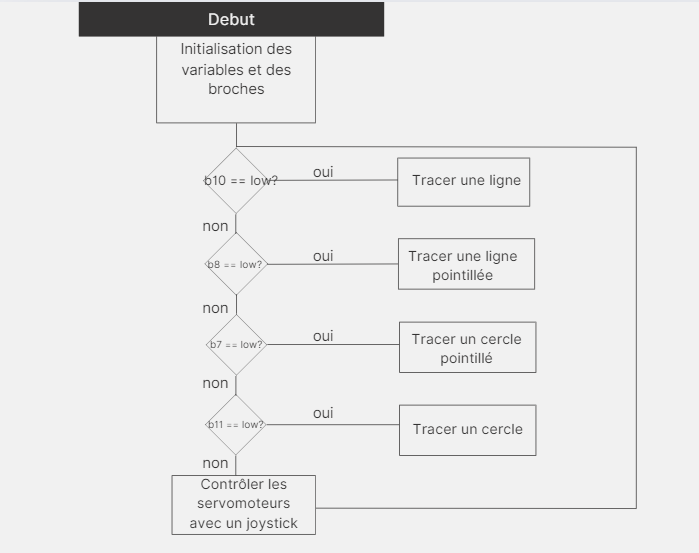
3 D) Algorithmes de commande
Développement d’algorithmes secondaires :
- Une fonction de détermination des coordonnées actuelles basée sur les angles des servomoteurs, conformément au modèle géométrique du robot.
- Une fonction pour tracer un cercle, en ajustant les angles via les fonctions de détermination de coordonnées.
- Une fonction pour tracer une ligne horizontale lorsque le bouton b10 est enfoncé.
- Une fonction qui fait bouger les servomoteurs pour tracer une ligne pointillée lorsque le bouton connecté à la broche b8 est enfoncé, alternant les positions de monServo3 (le servomoteur qui assure la translation) pour créer les points.
- Une fonction pour tracer un cercle pointillé lorsque le bouton b7 est enfoncé, alternant monServo3 entre 70 et 110 degrés pour créer les pointillés, avec temporisations pour chaque segment.
Conclusion :
Après avoir assemblé nos différentes pièces, nous avons pu exécuter nos codes et réussir à réaliser les différentes tâches du cahier des charges. Tout au long de ce projet, nous avons appliqué les astuces et les calculs appris en cours et les avons vus prendre une forme réelle.
Cela nous a également appris, en tant que futurs ingénieurs, que rien ne peut être prévu à l'avance et que nous rencontrerons certainement ce genre de problèmes plus d'une fois. L'essentiel est de rebondir et de ne pas baisser les bras. Et comme le disait Winston Churchill : « Qui ose, gagne ».