PROJET ROB de Maroua, Marco, Yanis
Projet Maranis
Informations
- Membres :
- Maroua Hriouit
- Yanis
- Marco Grandclaude
- Mail
mamaroua.hriouit@etu.sorbonne-universite.fr- ya
- marco.grandclaude@etu.sorbonne-universite.fr
- Polytech ROB
- 7 février 2024 - mai 2024
ObjectifsTable de matière:
1- Introduction:
1.1 Définition et objectifs du projet
1.2 Description fonctionnelle des besoins
1.3 Moyens à disposition
2- Propositions de réalisation et analyse des risques
2.1 Robot voiture
2.2 Robot cartésien
2.3 Bras robotisée
3- Solution retenue
Sommaire1- Introduction:
I1.1 /Définition Etudeet objectifs du projet : Un robot qui dessine
Dans le cadre de nos études en robotique, on est amené à concevoir un robot capable de dessiner a l’aide d’un crayon fixé à l’extrémité terminale du robot.
L'objectif principal de ce projet consiste à élaborer et mettre en œuvre un système robotique complet, englobant sa composante mécanique, son système de motorisation, son dispositif de commande, ainsi que son interface de pilotage. Le cahier des charges fourni définit de manière détaillée les fonctions que le système doit exécuter et les contraintes auxquelles il doit se conformer.
IIPour nous, étudiants, ce projet offre l'opportunité d'acquérir une expérience professionnelle en gestion de projet, en mettant particulièrement l'accent sur le travail en équipe. Il nous permettra également de mettre en pratique tout ce que nous avons étudié tout au long du premier semestre, y compris la conception et la modélisation, le calcul des modèles géométriques direct et inverse, ainsi que la programmation en C. Et enfin apprendre à manipuler des machines d’impression 3D et découpe LASER.
1.2 Description fonctionnelle des besoins :
1- Dessin Précis : Le robot doit être capable d'exécuter des dessins précis définies en 10 secondes +/- 0.2 secondes conformément aux spécifications fournies, en respectant les dimensions et les formes définies :
a. Une ligne de 5cm de long,
b. Une ligne pointillée de 5cm de long,
c. Un cercle de 2.5cm de rayon,
d. Un cercle pointillé de 2.5cm de rayon.
2- Dessiner, en utilisant un crayon fixé à l'extrémité du bras robotique, un motif prédéfini sur le plan de la plaque de support, dans un carré de dimensions 5 cm par 5 cm. Le déplacement du bras robotique sera contrôlé par un joystick. Il est à noter que la figure peut être discontinue, ce qui implique la nécessité de pouvoir soulever le crayon du support horizontal au besoin.
3-Une fonctionnalité supplémentaire pourrait être mise en œuvre : La possibilité de régler la vitesse de déplacement du robot à travers l'interface.
1.3 Moyens à disposition :
-Un crayon
-Interface de commande :
-Une carte arduino UNO avec câble USB-B ;
-Un joystick ;
-Une platine de prototypage ;
-Alimentation régulée 5V ;
-Câbles, LEDs, boutons poussoirs, résistances.
-Motorisation :
-Deux servomoteurs HS422 180° ;
-Un servomoteur Emax ES08A 180°.
-Mécanique :
-Matière PLA pour impression 3D ;
-Feuilles medium : 3mm et 6mm d’épaisseur ;
-Vis et écrous : M2, M2.5, M3, M4.
-Roulements et axes de diamètre 4mm.
2- Propositions de réalisation et analyse des risques
1)2.1 Solution 1: Robot voiture :
2)Principe Robot: cartésien
3)Comme Braspremière robotiquesolution, l'idée consiste à utiliser une voiture à deux roues sur laquelle seront fixés nos deux moteurs. Ensuite, nous envisageons de positionner une forme cylindrique sur la voiture, à l'intérieur de laquelle sera intégré un engrenage. Cette configuration permettrait la translation du stylo selon l'axe z, offrant ainsi une méthode mécanique pour réaliser les mouvements nécessaires à notre robot.
IIICroquis /:
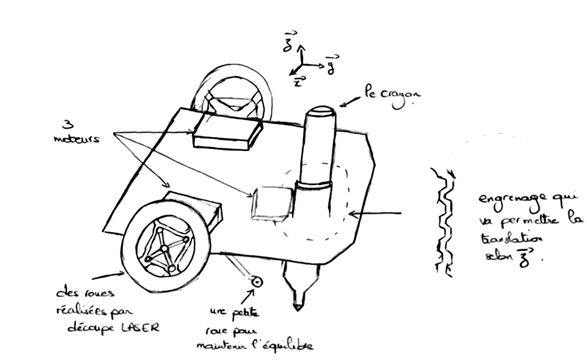
figure 1: croquis du robot voiture
Schéma cinématique :
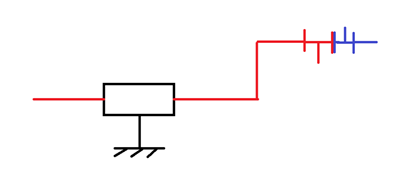 figure 2: schéma cinématique du robot voiture
figure 2: schéma cinématique du robot voiture
Contraintes:
Compte tenu des moteurs utilisés, cette solution ne sera pas viable. En effet, les servomoteurs n'effectuent qu'une rotation de Gantt180 degrés, ce qui signifie que pour parcourir une certaine distance D, il faudra effectuer n tours de 360 degrés. Cela nous obligerait à utiliser un diamètre de roues très important, entraînant des complications liées aux calculs et aux glissements.
2)
2.2 Solution 2 : robot cartésien :
Principe :
Notre robot cartésien se déplace selon un système de coordonnées x, y et z dans l'espace. Il utilise les servomoteurs rotatifs pour effectuer ses mouvements. Nous
Schéma cinématique :
Contraintes : En raison du manque 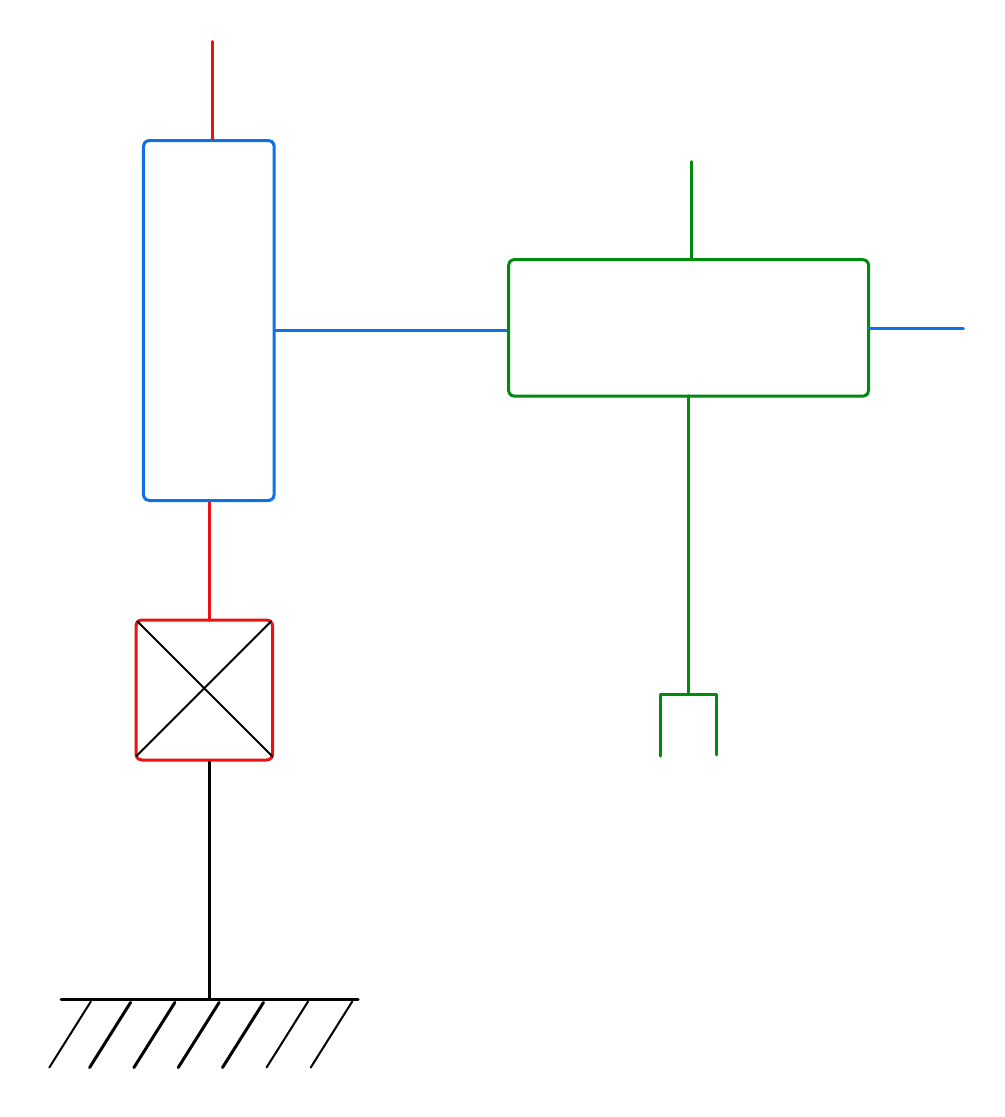 de matériel, cette solution n'est pas viable. En effet, nous n'avons pas à notre disposition une courroie pour effectuer les translations.
de matériel, cette solution n'est pas viable. En effet, nous n'avons pas à notre disposition une courroie pour effectuer les translations.