PROJET ROB de Maroua, Marco, Yanis
Projet Maranis : Un robot écrivain
Informations
- Membres :
- Maroua Hriouit
- Yanis Sadoun
- Marco Grandclaude
- Mail:
- Polytech ROB 3 Année 2023-2024
- 7 février 2024 - mai 2024
Table de matière:
1- Introduction:
1.1 Définition et objectifs du projet
1.2 Description fonctionnelle des besoins
1.3 Moyens à disposition
2- Propositions de réalisation et analyse des risques
2.1 Robot voiture
2.2 Robot cartésien
2.3 Robot axe en série
2.4 Robot à 3 rotations
2.5 Robot avec bras parallèles
3- Solution retenue
1- Introduction:
1.1 Définition et objectifs du projet : Un robot qui dessine
Dans le cadre de nos études en robotique, on est amené à concevoir un robot capable de dessiner a l’aide d’un crayon fixé à l’extrémité terminale du robot.
L'objectif principal de ce projet consiste à élaborer et mettre en œuvre un système robotique complet, englobant sa composante mécanique, son système de motorisation, son dispositif de commande, ainsi que son interface de pilotage. Le cahier des charges fourni définit de manière détaillée les fonctions que le système doit exécuter et les contraintes auxquelles il doit se conformer.
Pour nous, étudiants, ce projet offre l'opportunité d'acquérir une expérience professionnelle en gestion de projet, en mettant particulièrement l'accent sur le travail en équipe. Il nous permettra également de mettre en pratique tout ce que nous avons étudié tout au long du premier semestre, y compris la conception et la modélisation, le calcul des modèles géométriques direct et inverse, ainsi que la programmation en C. Et enfin apprendre à manipuler des machines d’impression 3D et découpe LASER.
1.2 Description fonctionnelle des besoins :
1 - Dessin Précis : Le robot doit être capable d'exécuter des dessins précis définies en 10 secondes +/- 0.2 secondes conformément aux spécifications fournies, en respectant les dimensions et les formes définies :
a. Une ligne de 5cm de long,
b. Une ligne pointillée de 5cm de long,
c. Un cercle de 2.5cm de rayon,
d. Un cercle pointillé de 2.5cm de rayon.
2 - Dessiner, en utilisant un crayon fixé à l'extrémité du bras robotique, un motif prédéfini sur le plan de la plaque de support, dans un carré de dimensions 5 cm par 5 cm. Le déplacement du bras robotique sera contrôlé par un joystick. Il est à noter que la figure peut être discontinue, ce qui implique la nécessité de pouvoir soulever le crayon du support horizontal au besoin.
3 - Une fonctionnalité supplémentaire pourrait être mise en œuvre : La possibilité de régler la vitesse de déplacement du robot à travers l'interface.
1.3 Moyens à disposition :
- Un crayon
- Interface de commande :
- Une carte arduino UNO avec câble USB-B ;
- Un joystick ;
- Une platine de prototypage ;
- Alimentation régulée 5V ;
- Câbles, LEDs, boutons poussoirs, résistances.
- Motorisation :
- Deux servomoteurs HS422 180° ;
- Un servomoteur Emax ES08A 180°.
- Mécanique :
- Matière PLA pour impression 3D ;
- Feuilles medium : 3mm et 6mm d’épaisseur ;
- Vis et écrous : M2, M2.5, M3, M4.
- Roulements et axes de diamètre 4mm.
2- Propositions de réalisation et analyse des risques
2.1 Solution 1 : Robot voiture
Principe :
Comme première solution, l'idée consiste à utiliser une voiture à deux roues sur laquelle seront fixés nos deux moteurs. Ensuite, nous envisageons de positionner une forme cylindrique sur la voiture, à l'intérieur de laquelle sera intégré un engrenage. Cette configuration permettrait la translation du stylo selon l'axe z, offrant ainsi une méthode mécanique pour réaliser les mouvements nécessaires à notre robot.
Croquis :
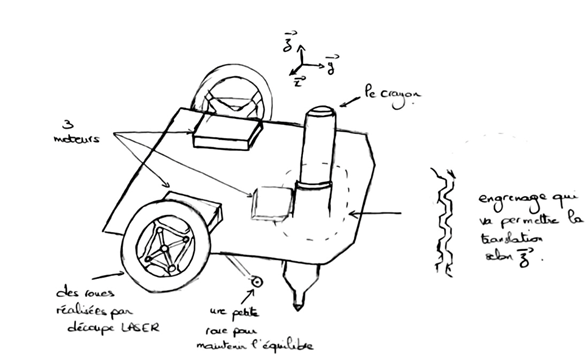
figure 1 : croquis du robot voiture
Schéma cinématique :
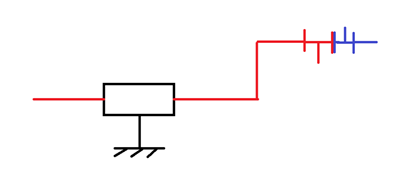 figure 2 : schéma cinématique du robot voiture
figure 2 : schéma cinématique du robot voiture
Contraintes:
Compte tenu des moteurs utilisés, cette solution ne sera pas viable. En effet, les servomoteurs n'effectuent qu'une rotation de 180 degrés, ce qui signifie que pour parcourir une certaine distance D, il faudra effectuer n tours de 360 degrés. Cela nous obligerait à utiliser un diamètre de roues très important, entraînant des complications liées aux calculs et aux glissements.
2.2 Solution 2 : robot cartésien
Principe :
Ce robot serait conçu pour se déplacer suivant un système de coordonnées en X et Y, offrant une grande précision dans un espace bidimensionnel.
La particularité de ce robot réside dans sa capacité à effectuer des translations le long de deux axes distincts : horizontal (axe X) et vertical (axe Y). Pour ce faire, le robot serait équipé de rails horizontaux et verticaux, permettant des mouvements fluides et contrôlés dans ces deux directions.
Croquis :
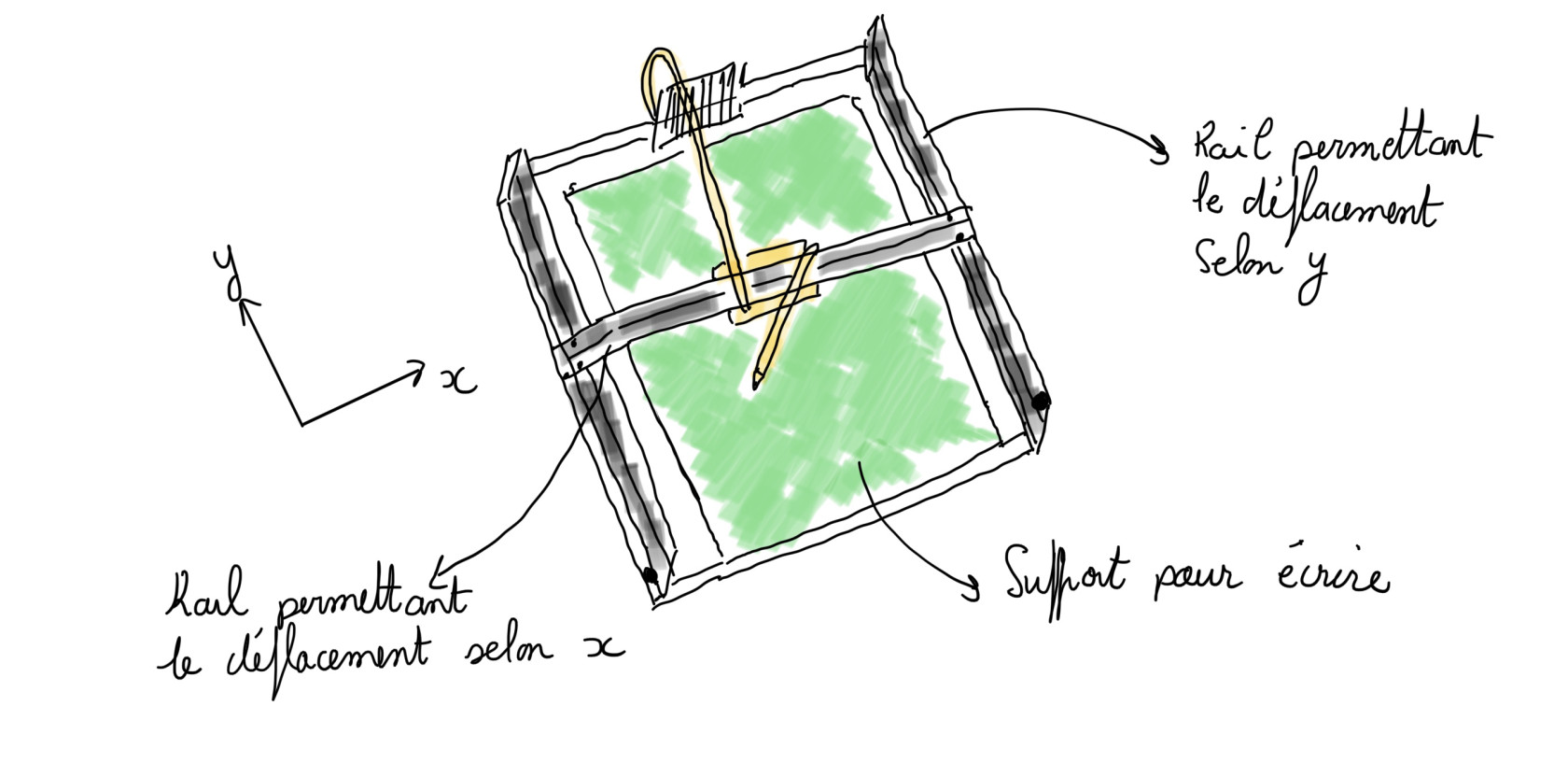
figure 3: croquis du robot cartésien
Schéma cinématique :
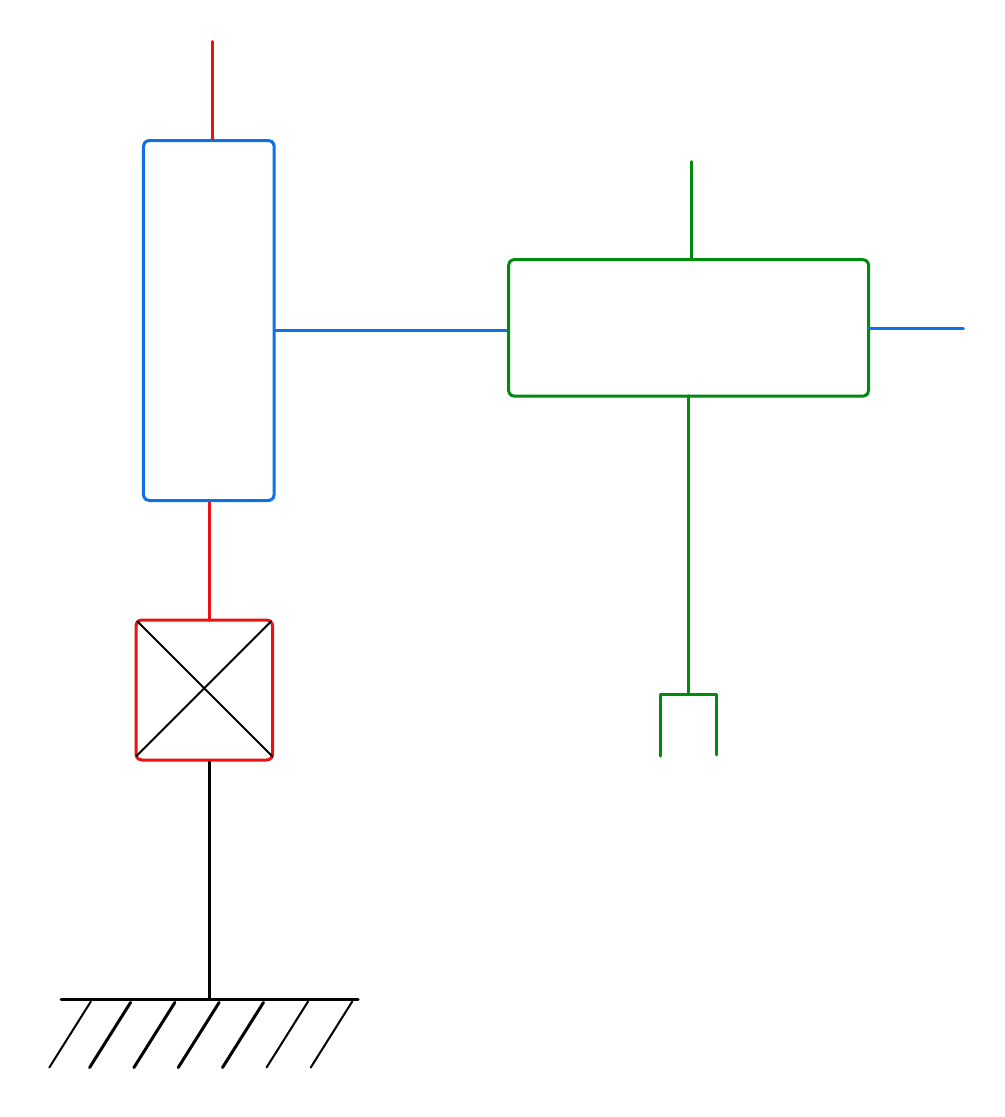
figure 4 : schéma cinématique du robot cartésien
Contraintes :
Manque de matériel pour les translations : Nous ne disposons pas des composants nécessaires, tels que des courroies, pour réaliser les translations efficaces sur les axes X et Y. L'absence de ces éléments essentiels est un obstacle à la construction de ce système .
Complexité de fabrication des rails : La conception et la réalisation des rails, essentiels pour les déplacements précis du robot, nous semblent particulièrement complexes, surtout avec les seuls servomoteurs disponibles.
Incapacité de mouvement sur l'axe Z : Avec les composants actuels , le robot ne serait pas capable de lever le crayon le long de l'axe Z. Cette limitation rend impossible la réalisation de tracés en pointillés, une des exigences clés du cahier des charges.
Bien que conceptuellement intéressante, la solution du robot cartésien se heurte à des contraintes matérielles et techniques qui compromettent sa faisabilité dans notre contexte actuel.
2.3 Solution 3 : Robot constitué d'axe en série
Principe :
Le robot envisagé se caractérise par une structure à axe en série. Il intègre un châssis stable comme base principale, sur lequel est fixé un bras articulé. Ce bras se compose de trois segments (bielles), chacun connecté au suivant via une liaison pivot, permettant ainsi une gamme étendue de mouvements. La dernière bielle est directement soudée à un adaptateur, conçu pour maintenir fermement un stylo. La stabilité et la précision du mouvement des bielles seront assurées par l'intégration de roulements . Parallèlement, un support de feuille sera installé, aligné dans le même plan que le châssis du robot, afin de faciliter l'interaction précise du stylo avec le papier.
Croquis :
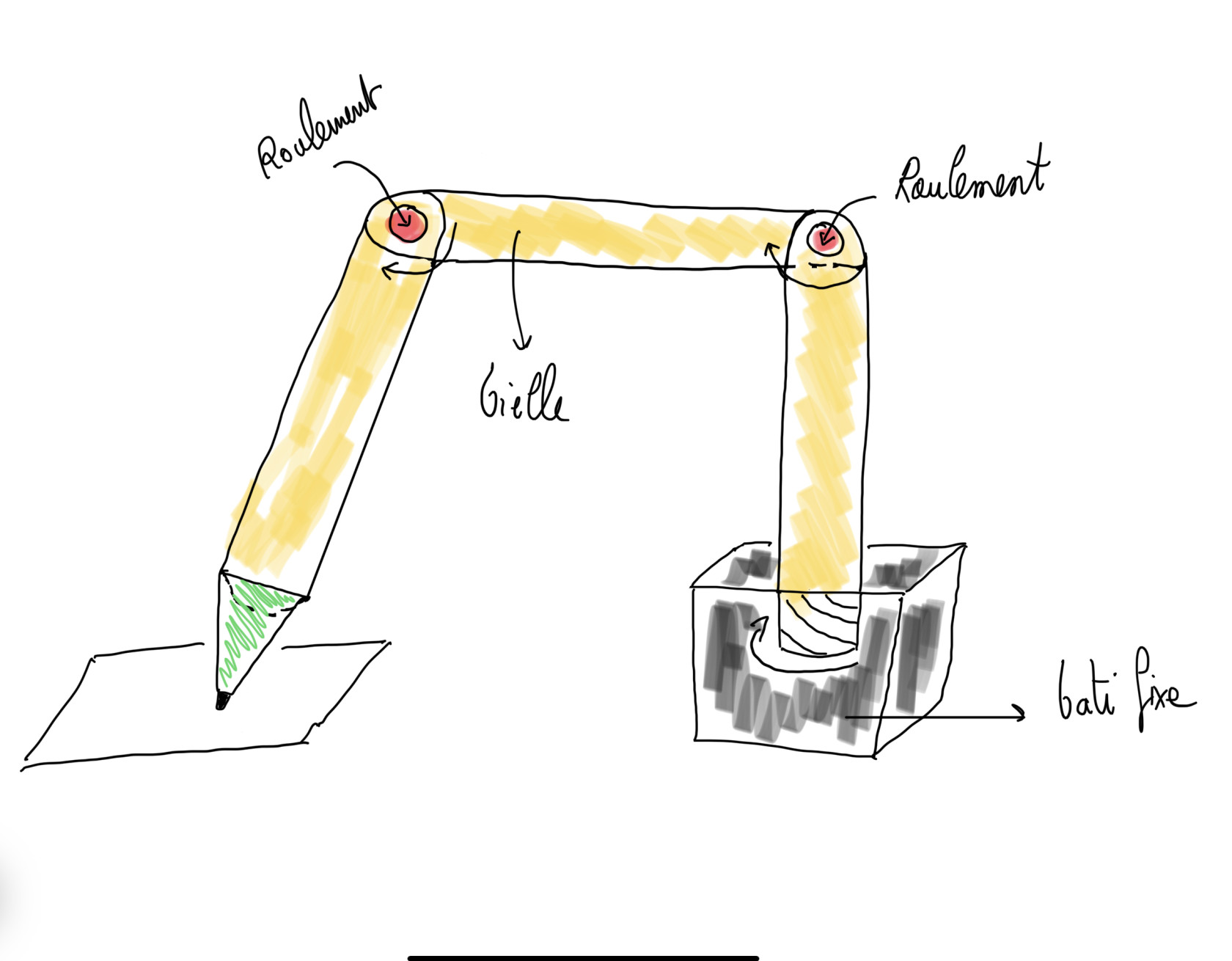
figure 5 : croquis du robot à axe en série
Avantages :
- Cinématique simple : La structure à axe en série offre une cinématique plus facile à concevoir et à programmer, grâce à une chaîne cinématique linéaire et moins complexe.
Risques et défis :
- Stabilité structurelle : Ces robots peuvent présenter des problèmes de stabilité, surtout lors de la manipulation de charges ou lors de mouvements rapides.
- Précision dans les positions extrêmes : La précision peut diminuer aux extrémités de la portée du robot, où les effets de la gravité et de la flexion des composants sont plus prononcés.
2.4 Solution 4 : Robot à trois rotations
Principe :
Ce concept de robot s'inspire directement de la morphologie humaine, intégrant trois axes de rotation pour imiter les mouvements naturels du corps. En faisant une analogie avec le corps humain, la gestion de la hauteur de la pince (qui agirait comme une main) est assurée par deux rotations principales : une au niveau de l'« épaule » et une autre au niveau du « coude », correspondant respectivement aux rotations 2 et 3 du système. Cette configuration permet une manipulation verticale précise et polyvalente de la pince. Pour compléter la gamme de mouvements, une troisième rotation est ajoutée au niveau du « poignet », offrant la capacité de torsion. Cette troisième rotation apporte une flexibilité supplémentaire, essentielle pour des tâches complexes nécessitant une orientation fine de la pince.
Croquis :
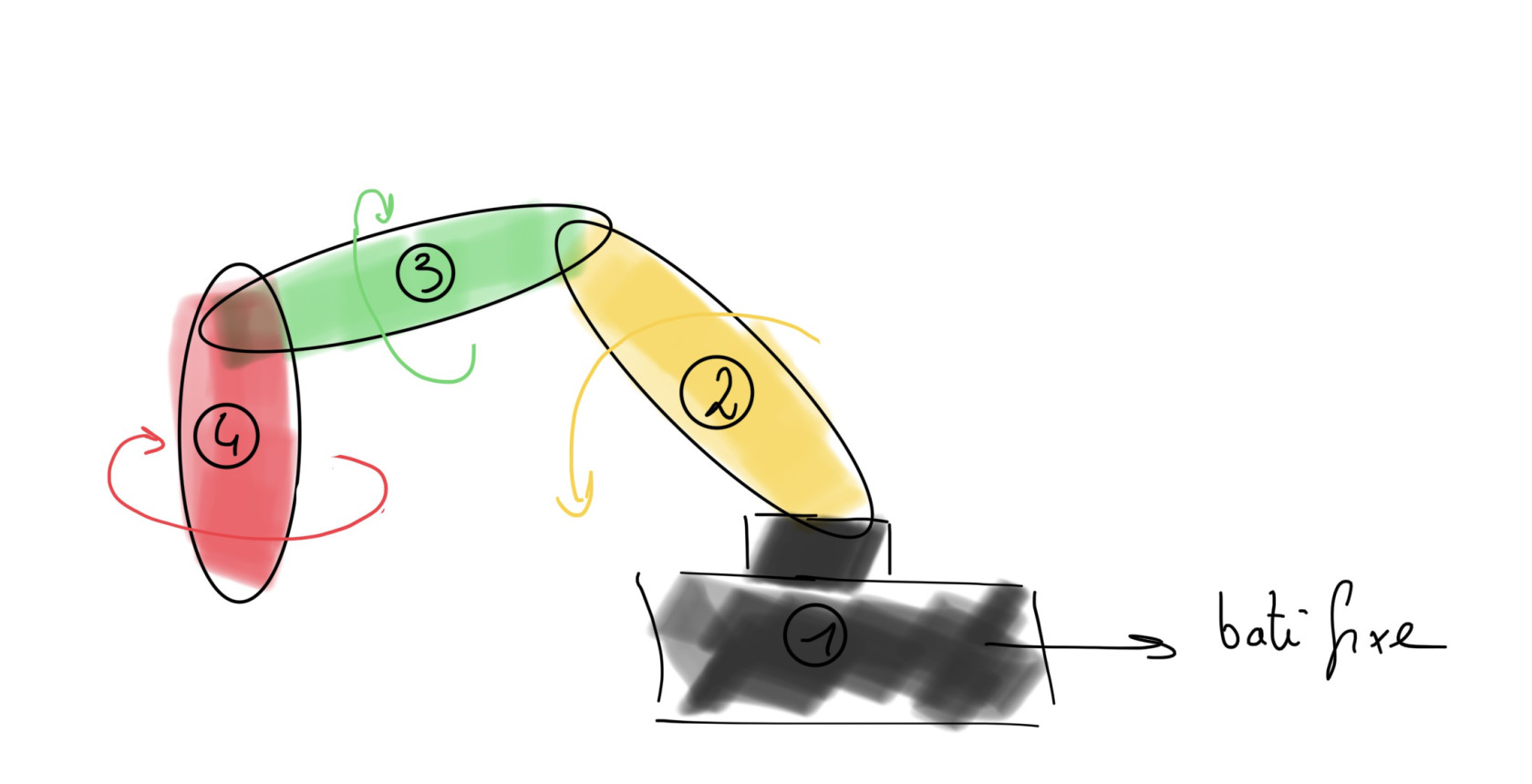
figure 67 : croquis du robot à 3 rotations
Schéma cinématique :
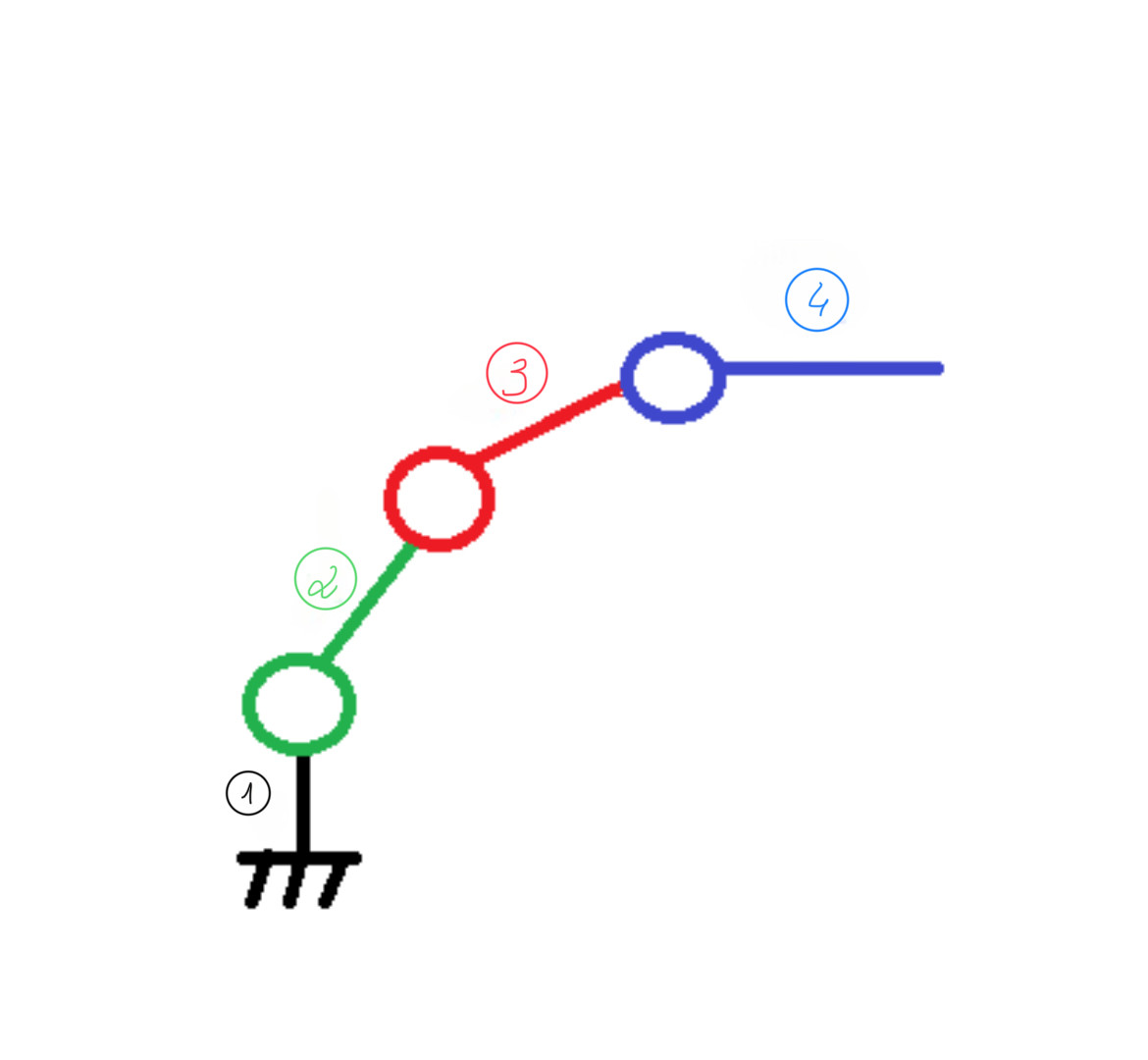
figure 8 : schéma cinématique du robot à trois rotations
Avantages:
- Fabrication plus efficace : L’ensemble des pièces peuvent être réalisé en découpe laser ce qui permet une production plus rapide et précise des pièces.
Inconvénients:
- Stabilité du stylo : Assurer que le stylo reste précisément à la position voulue durant les mouvements complexes.
- Complexité du modèle cinématique inverse : La gestion des trois rotations (épaule, coude, poignet) rend le calcul du modèle cinématique inverse complexe, crucial pour la précision des mouvements du robot.
2.5 Solution 5 : Robot avec bras parallèles
Principe:
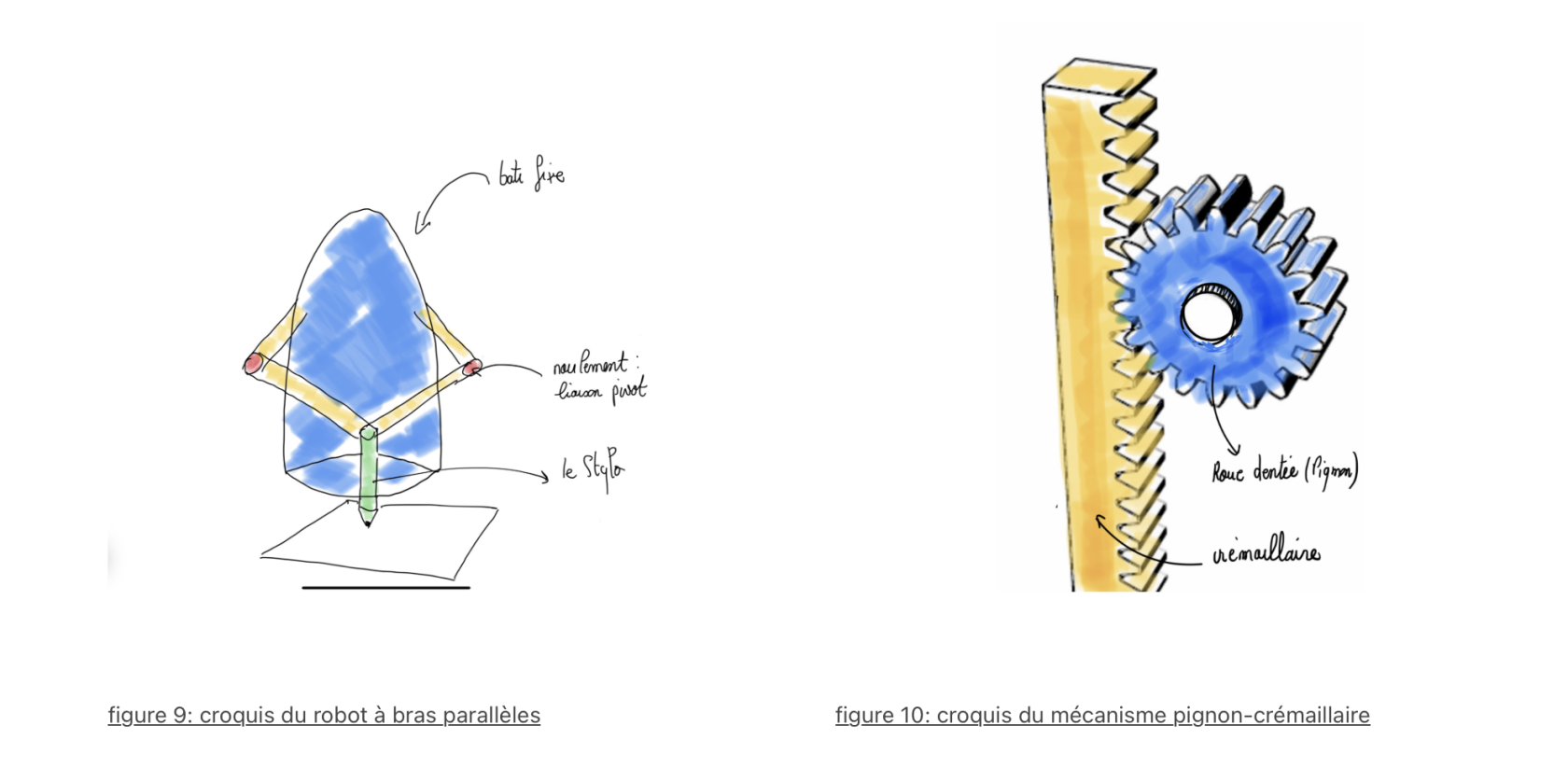
Le concept envisagé ici est celui d'un robot à bras parallèle à deux axes, conçu spécifiquement pour une manœuvrabilité précise. Pour permettre au stylo de se déplacer verticalement (translation selon l'axe Z), le robot intégrera un mécanisme de pignon -crémaillère. ( Ce choix de conception assure une montée et une descente contrôlées et stables du stylo. Comme pour le modèle à axe en série, les points de pivot au niveau des "coudes" du robot seront équipés de roulements.
Croquis :
Avantages:
- Solidité structurelle : Les robots parallèles offrent une grande solidité et stabilité, ce qui est avantageux pour des tâches nécessitant de la précision et de la force.
- Cinématique simplifiée possible : En configurant les bras du robot pour former un parallélogramme avec les axes de servomoteurs alignés, il est possible de simplifier la cinématique, facilitant ainsi la programmation et le contrôle.
Risques et défis:
- Complexité cinématique initiale : Sans cette simplification, la cinématique des robots parallèles peut être initialement plus complexe, nécessitant une compréhension approfondie des systèmes mécaniques.
De plus , il faut s’assurer que les rotations des servomoteurs de 180° permettent de couvrir l’ensemble de la surface souhaitée.
3- Solution retenue
Suite à une analyse approfondie des différentes options, notre équipe a décidé de privilégier la conception d'un robot parallèle pour la suite du projet. Cette décision s'appuie sur plusieurs facteurs clés :
- Conformité au cahier des charges : Le robot parallèle répond efficacement aux exigences spécifiées dans le cahier des charges. Sa structure offre la précision et la solidité requises pour les tâches prévues, tout en permettant une gamme de mouvements adaptée à nos besoins.
- Faisabilité technique : Avec les composants et les ressources à notre disposition, la réalisation d'un robot parallèle est non seulement possible mais également pratique. La possibilité de simplifier sa cinématique en configurant ses bras en parallélogramme facilite sa programmation et son contrôle, rendant le projet plus gérable dans le cadre de nos contraintes techniques et temporelles.
Nota bene : Le nom de notre robot sera "Maranis"; il est formé en combinant les prénoms Maroua, Marco, et Yanis.Il symbolise l'union de nos efforts et la collaboration au cœur de notre projet...