Projet ROB3 : Fares, Ilyes, Albéric
Conception préliminaire
Voici trois choix possible de conception du robot : LES DESSINS NE SONT PAS AUTO-SUFFISANTS. QUELQUES MOTS DE DESCRIPTION S'IMPOSENT POUR CHAQUE SOLUTION. METTEZ PLUS DE CONTRASTE ON NE VOIT PAS BIEN. APPLIQUEZ VOUS UN PEU PLUS.
PAR EXEMPLE POUR LE PREMIER:
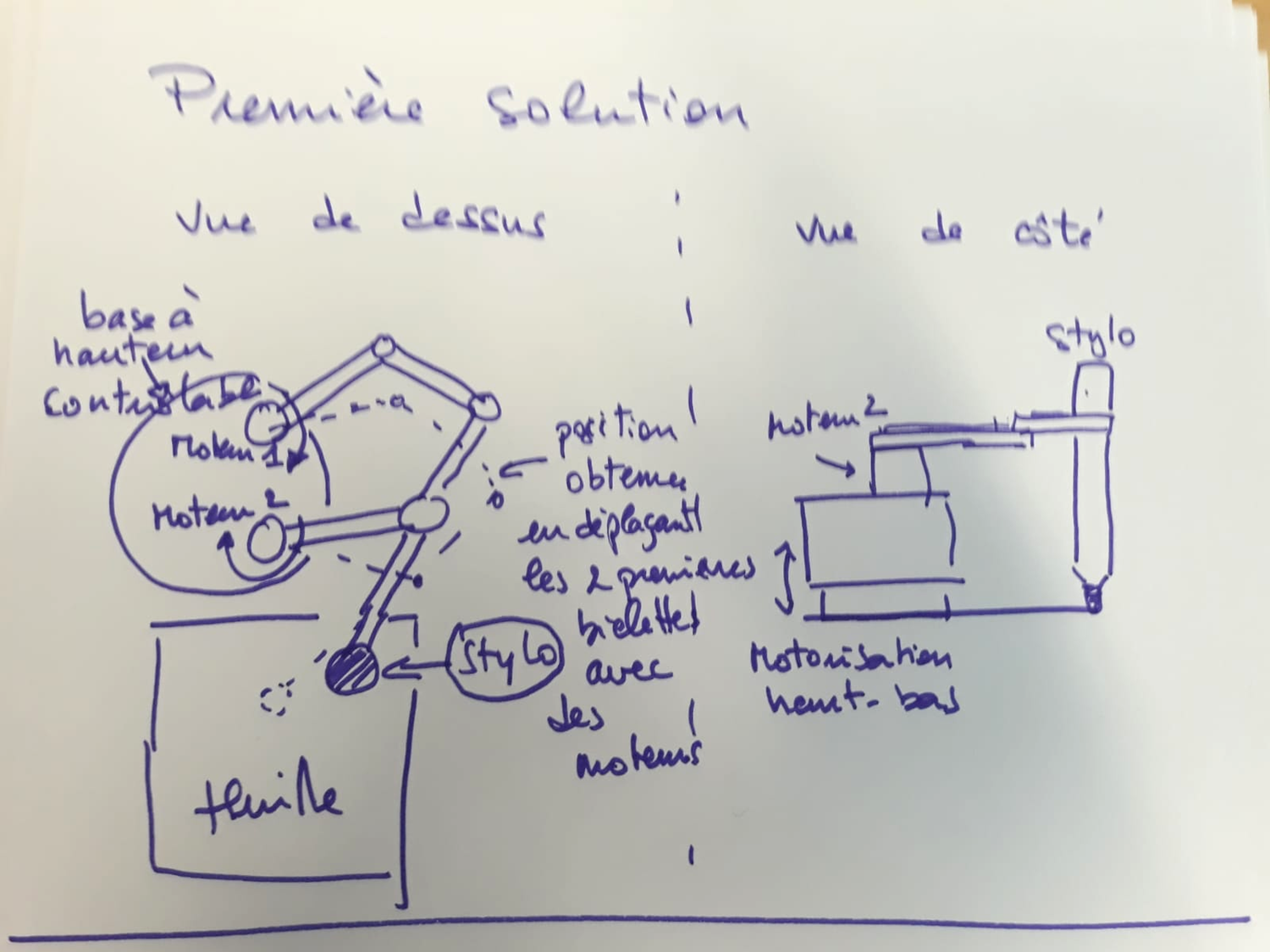
La première solution utilise pour les mouvements dans le plan (horizontal) de la feuille un mécanisme en boucle fermée à 5 barres , 5 liaisons pivot, dont deux sont motorisées. Voir une explication de son fonctionnement sur ce site . Pour les mouvements verticaux, on produit une translation verticale de la base qui soulève l'ensemble du robot.
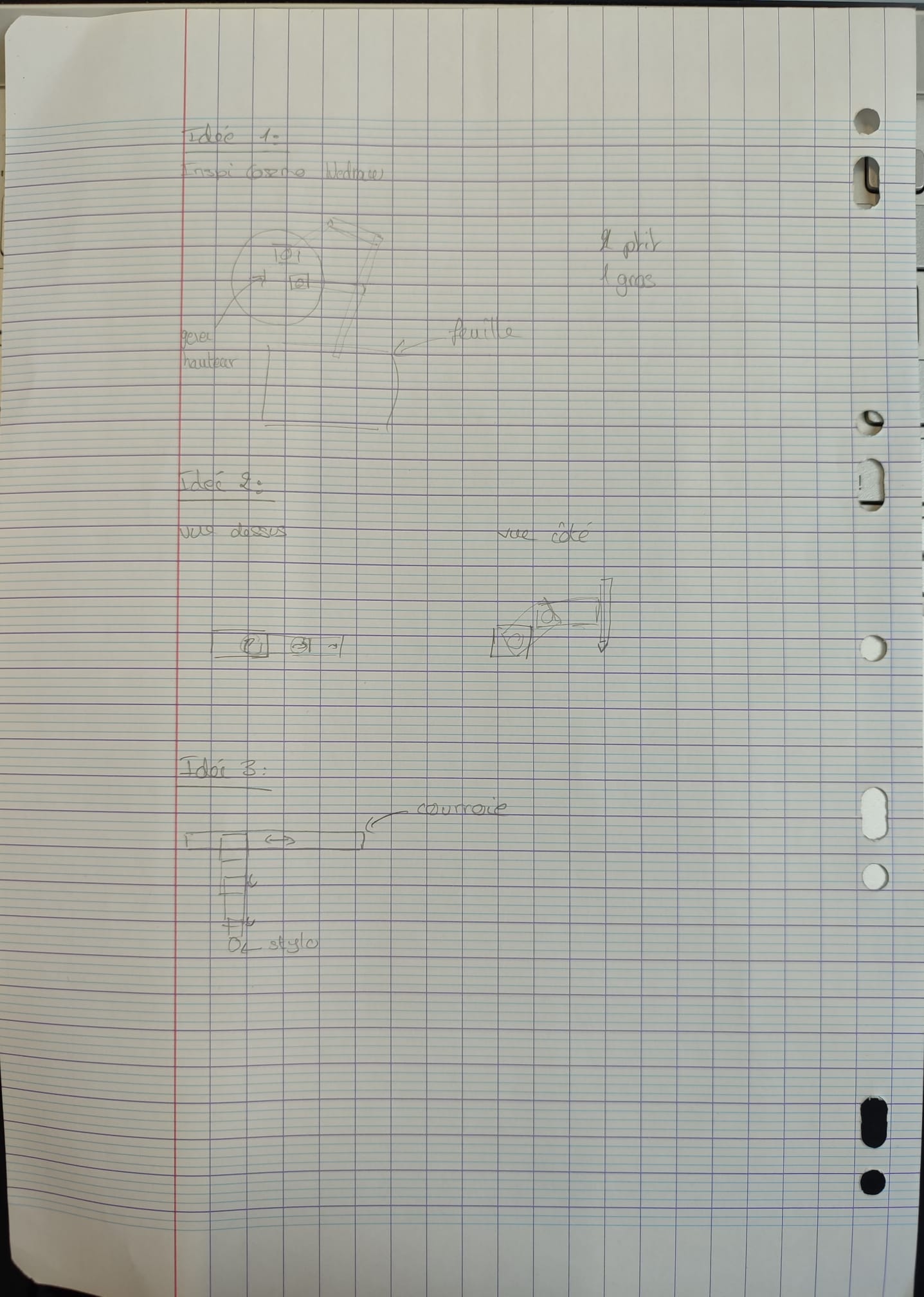
L’idée 3 à été écarté des possibilités en raison des composants disponibles.
| Solution | Avantages | Inconvénients |
|
Idée 1 |
-Facilité de conception -Esthétique -Précision
|
-Possibilité d'une écriture du code plus complexe en raison de la forme. |
| Idée 2 |
-Mise en place simple -Architecture simple -Pas de contrainte potentielle sur les composants |
-Possiblement -Pas spécialement beau
|
| Idée 3 |
- modèle cinématique facile à réaliser |
-Guidage difficile à réaliser - -possibilité de perte de précision lors des déplacements à causes des roulements |
QUELLENous ESTavons L'IDEEdécidé CHOISIEaprès ?l'étude des différentes solution de sélectionner la première proposition. D'une part puisque nous trouvions le design agréable et original. Et d'autre part pour certaines raisons pratiques cités ci-dessus.
Ensemble des tâches à réaliser pour la conception du robot :

Diagramme de Gantt : A REVOIR : CE N'EST PAS LA FORME D'UN DIAGRAMME DE GANTT

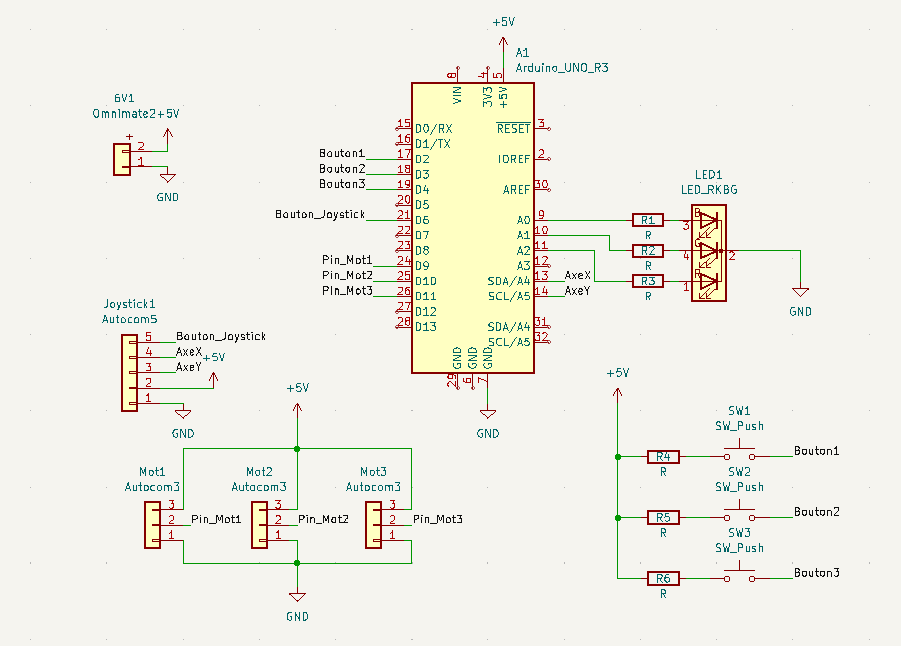
Schéma electronique :
Code provisoire :