Projet ROB3 : Fares, Ilyes, Albéric
Conception préliminaire
Voici trois choix possible de conception du robot :
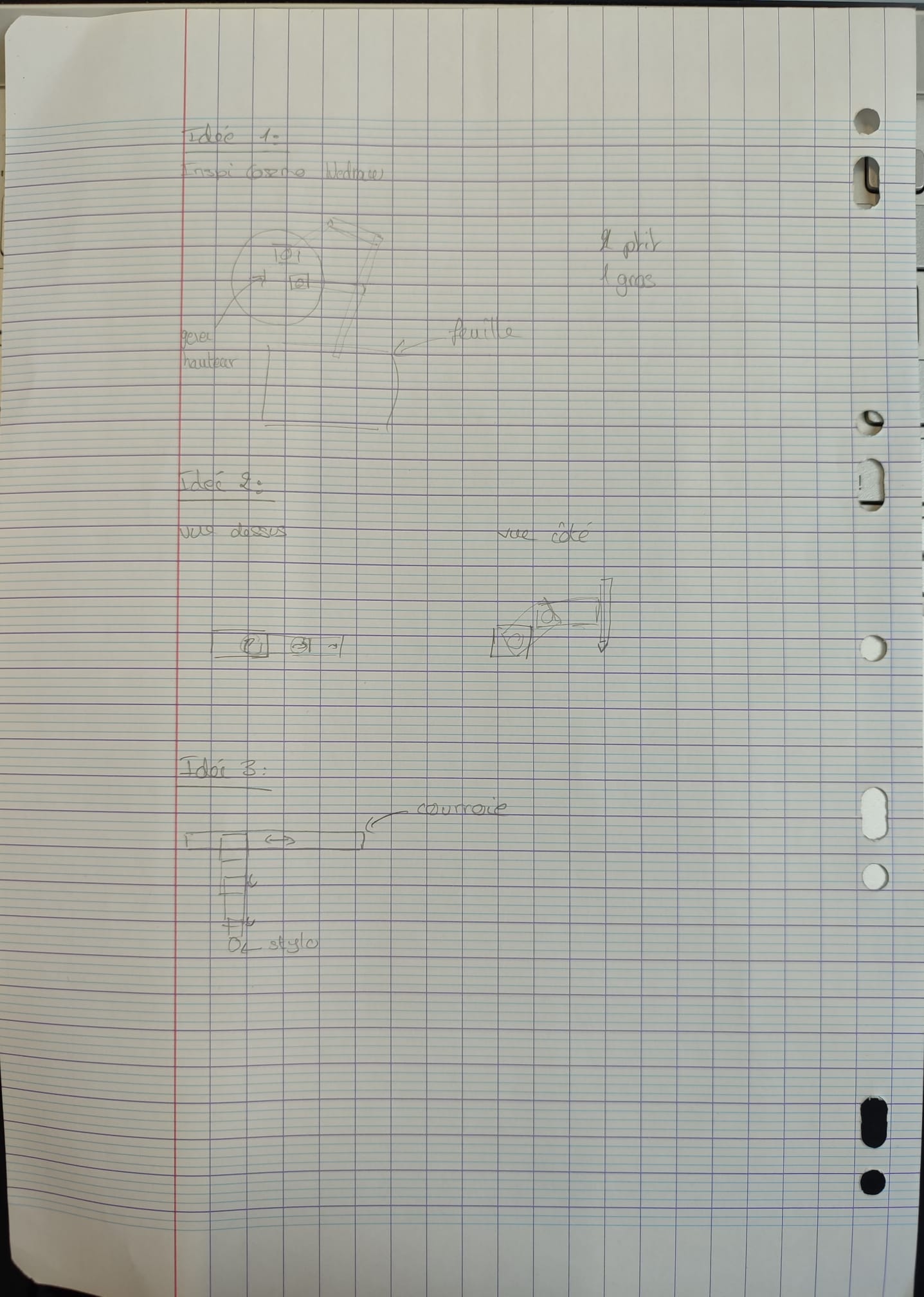
L’idée 3 à été écarté des possibilités en raison des composants disponibles.
| Solution | Avantages | Inconvénients |
|
Idée 1 |
-Facilité de conception -Esthétique -Précision
|
-Possibilité d'une écriture du code plus complexe en raison de la forme. |
| Idée 2 |
-Mise en place simple -Architecture simple -Pas de contrainte potentielle sur les composants |
-Possiblement moins précis -Pas spécialement beau
|
| Idée 3 |
- |
-Guidage difficile à réaliser -Composants non disponibles |
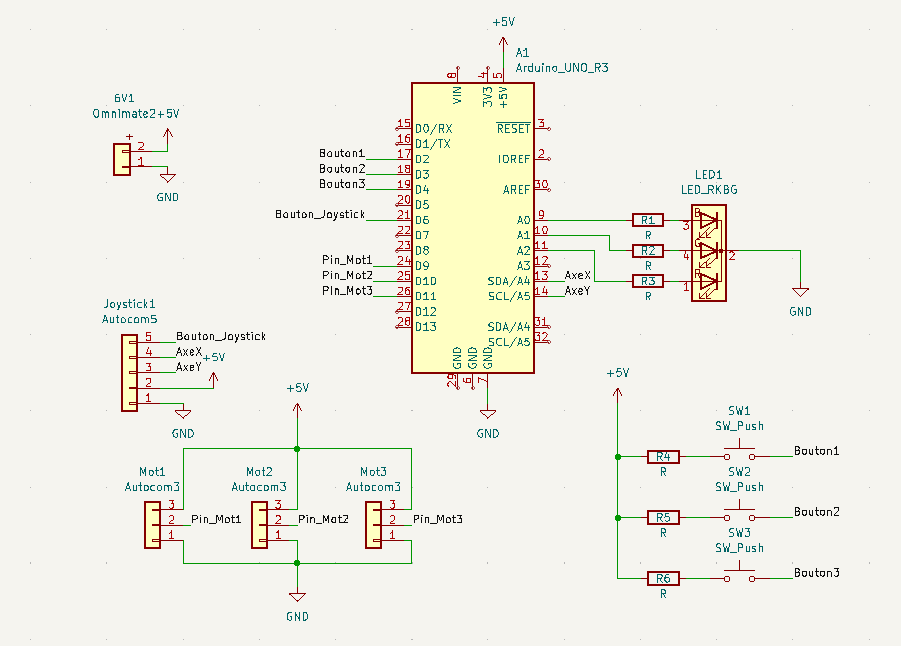
Schéma electronique :
Code provisoire :
#include <Arduino.h>
#include "Servo.h"
int axey = A1;
int axex = A0;
int valeurX;
int valeurY;
Servo servo1;
Servo servo2;
void setup() {
// put your setup code here, to run once:
servo1.attach(6);
servo2.attach(5);
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
valeurX = analogRead(axex);
valeurY = analogRead(axey);
valeurX = map(valeurX,0,1023,0,180);
valeurY = map(valeurY,0,1023,0,180);
servo1.write(valeurX);
servo2.write(valeurY);
delay(100);
Serial.print("x = ");
Serial.print(valeurX);
Serial.print(" Y = ");
Serial.println(valeurY);
}