Projet ROB3 : Fares, Ilyes, Albéric
Conception préliminaire
Voici trois choix possible de conception du robot : LES DESSINS NE SONT PAS AUTO-SUFFISANTS. QUELQUES MOTS DE DESCRIPTION S'IMPOSENT POUR CHAQUE SOLUTION. METTEZ PLUS DE CONTRASTE ON NE VOIT PAS BIEN. APPLIQUEZ VOUS UN PEU PLUS.
PAR EXEMPLE POUR LE PREMIER:
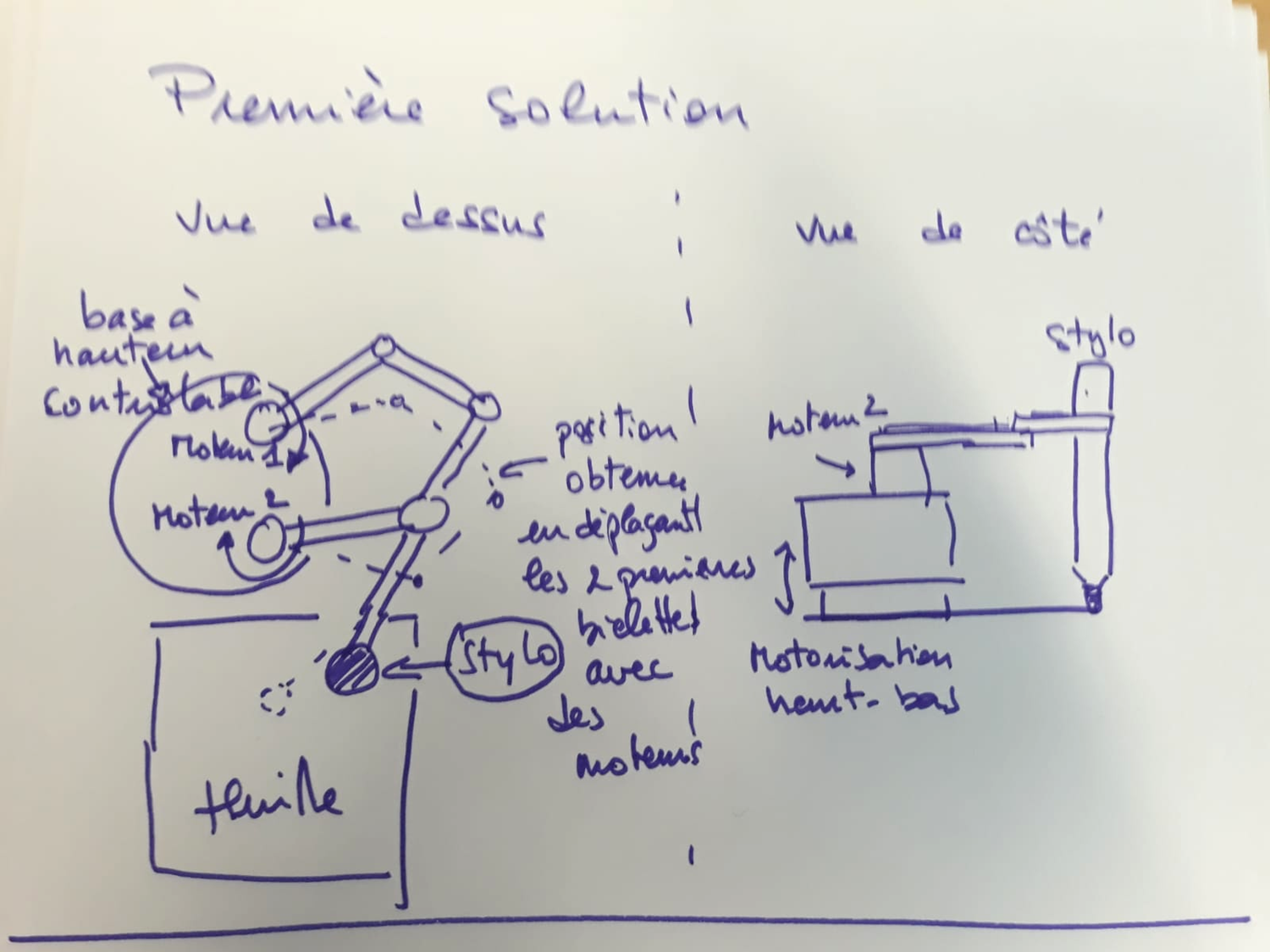
La première solution utilise pour les mouvements dans le plan (horizontal) de la feuille un mécanisme en boucle fermée à 5 barres , 5 liaisons pivot, dont deux sont motorisées. Voir une explication de son fonctionnement sur ce site . Pour les mouvements verticaux, on produit une translation verticale de la base qui soulève l'ensemble du robot.
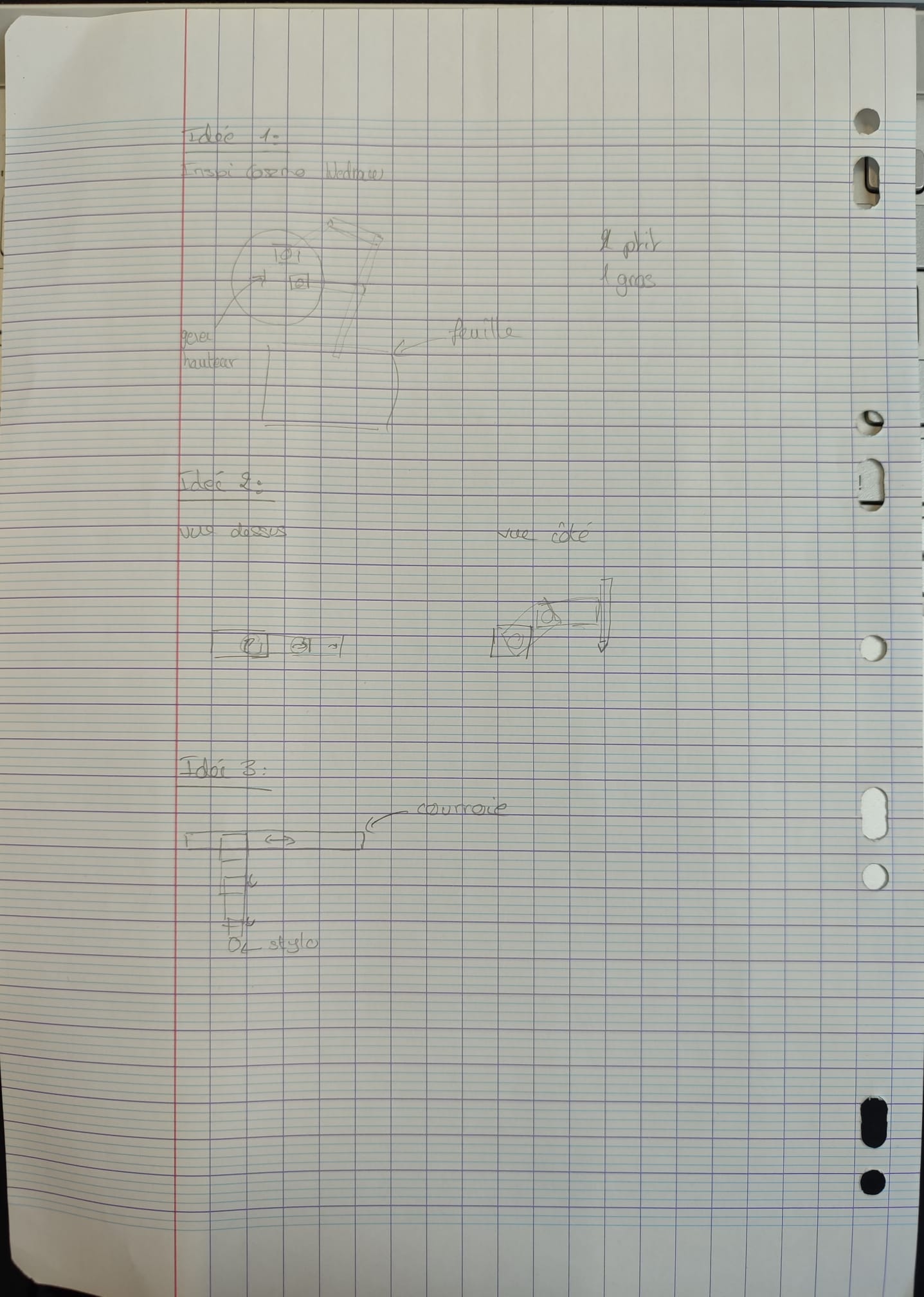
L’idée 3 à été écarté des possibilités en raison des composants disponibles.
| Solution | Avantages | Inconvénients |
|
Idée 1 |
-Facilité de conception -Esthétique -Précision POURQUOI -Possibilité de reposer les articulations sur les axes des moteurs PAS CLAIR
|
-Possibilité d'une écriture du code plus complexe en raison de la forme. |
| Idée 2 |
-Mise en place simple -Architecture simple -Pas de contrainte potentielle sur les composants |
-Possiblement moins précis POURQUOI -Pas spécialement beau
|
| Idée 3 |
- |
-Guidage difficile à réaliser LEQUEL -Composants non disponibles LESQUELS |
QUELLE EST L'IDEE CHOISIE ?
Diagramme de Gantt : A REVOIR : CE N'EST PAS LA FORME D'UN DIAGRAMME DE GANTT


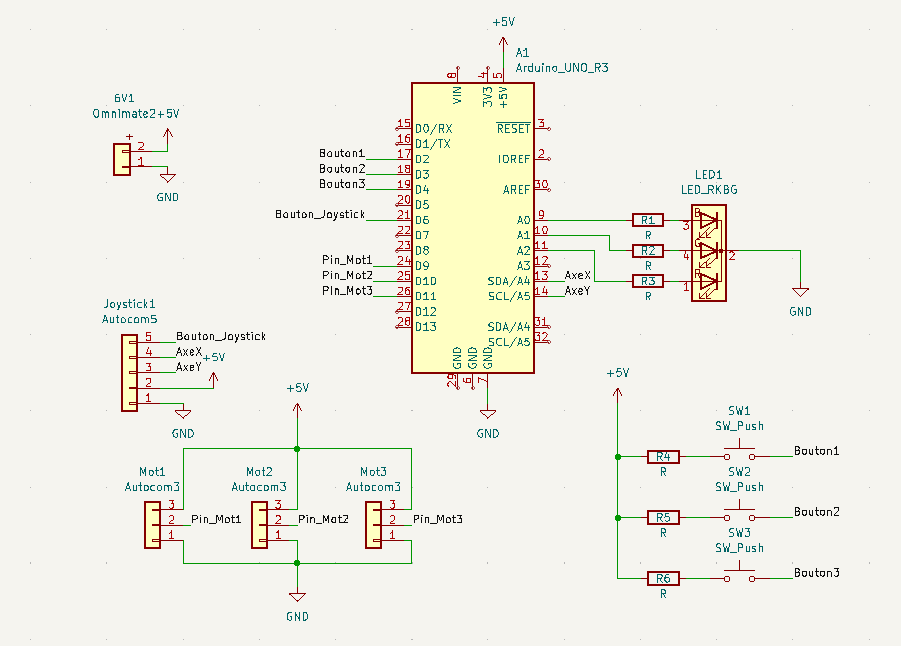
Schéma electronique :
Code provisoire :