Projet ROB3 : Joshua , Grigor , Dilhan
Présentation du projet
Informations
- NOM PRENOM :
- Hauzay Joshua
- Pelibossian Grigor
- Emir Dilhan
- ROB 3
- adresses mail :
- 7 février 2024 - mai 2024
Contexte
Dans le cadre de l’UE projet robotique
Objectifs
- Concevoir un système robotique :
• Sa partie mécanique
• Son actionnement
• Sa commande
• Son interface de pilotage
2. Savoir s’organiser en mode projet :
• Répartir et synchroniser les tâches
• Suivre l’avancement avec des objectifs intermédiaires
• Fournir la documentation technique
• Respecter un calendrier préétabli
3. Maîtriser le fonctionnement du FabLab
Cahier des charges :
-
Tracer différentes figures prédéfinies dans un carré de 5cm x 5cm, en 10 secondes.
-
Une ligne droite de 5 cm
-
Une ligne pointillée de 5 cm
-
Un cercle de 2,5cm de rayon
-
Un cercle pointillé de 2,5cm de rayon
-
Reproduire un dessin imposé (mais inconnu à l’avance) à l’aide d’un joystick dans un carré de 5cm x 5cm
-
Contrôle au moyen d’un joystick
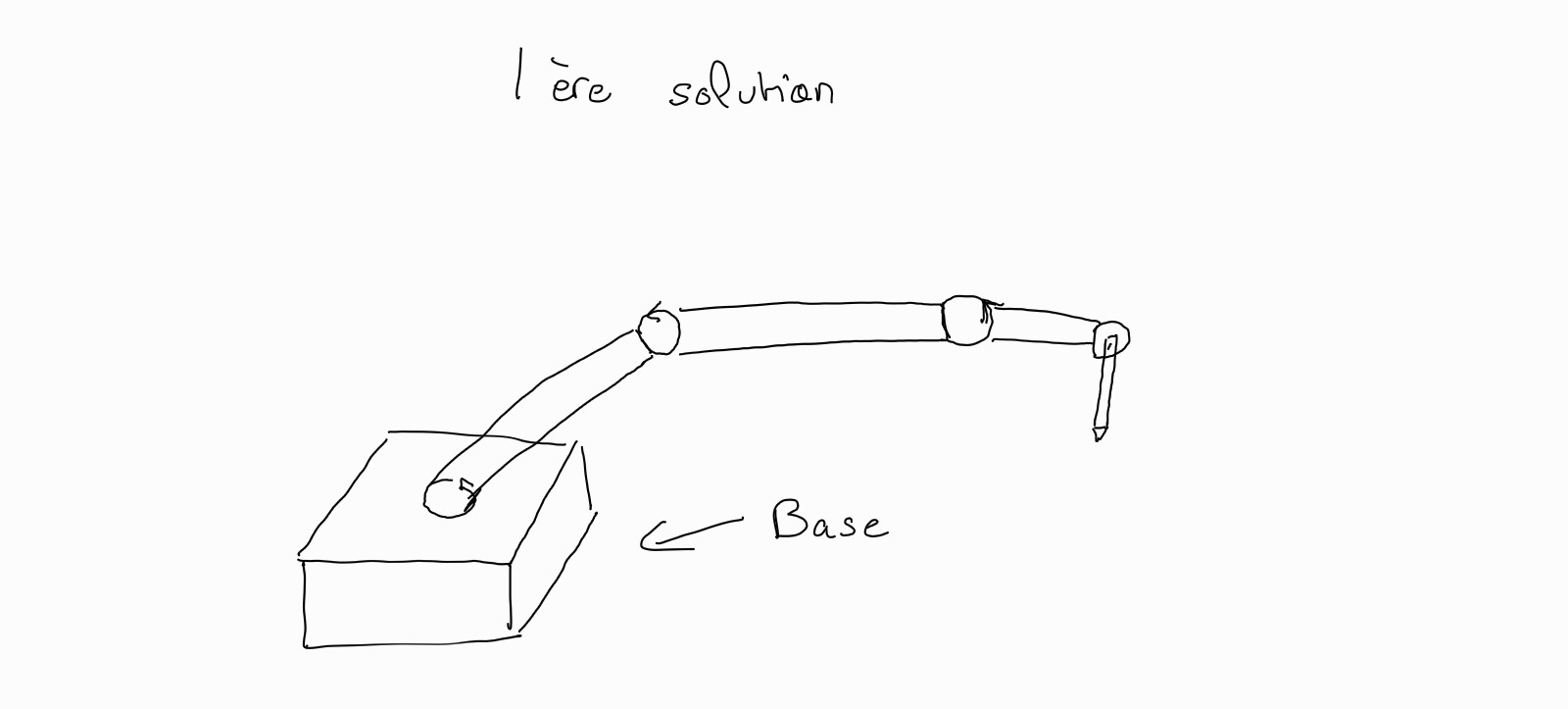
Première solution :
1 servo moteur a la base en rotation autour de Z
2 servo moteur sur le bras en rotation autour de Y
Deuxième Solution :
2 servo moteur en rotation selon Z dont un a la base et l'autre au centre du bras
1 servo moteur en rotation selon Y pour contrôler la pose du feutre

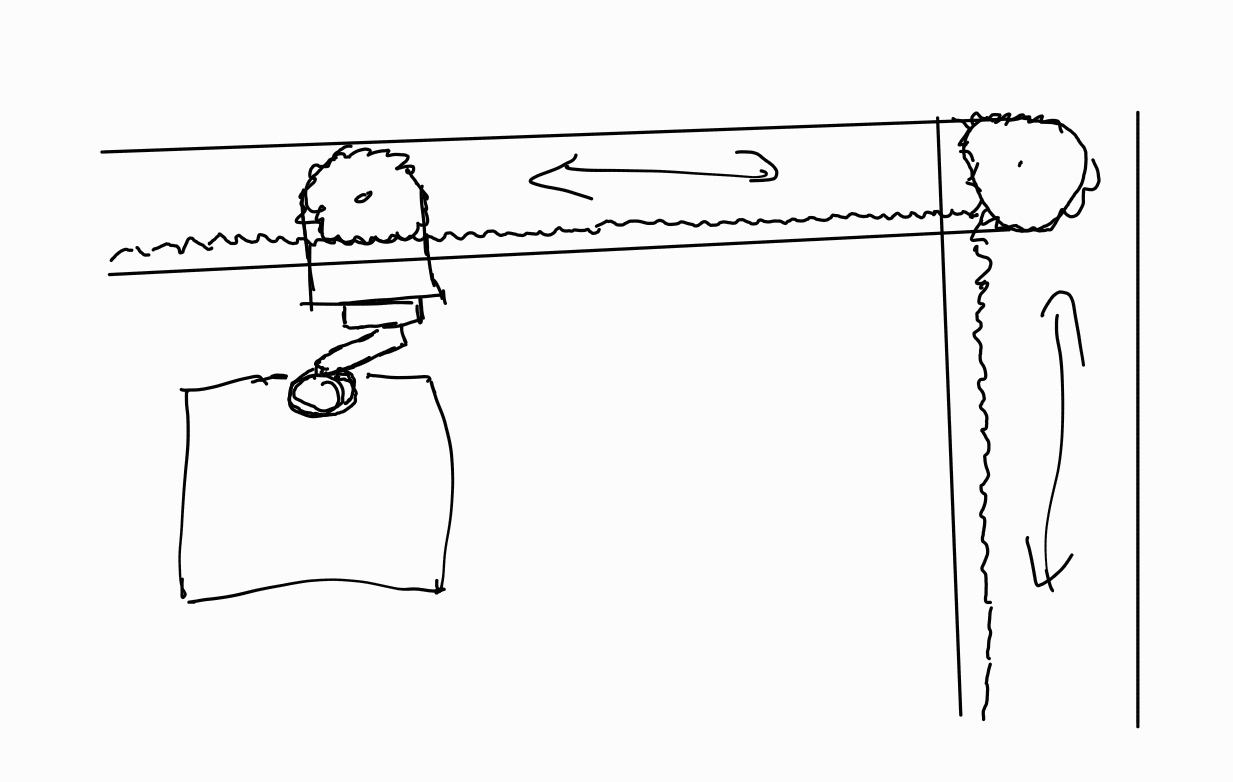
Troisième solution :
Solution de pignon crémaillère
GANTT:
https://docs.google.com/spreadsheets/d/1rBMSOXjBwbDXSA9WxZV4CNlc4wGikqxUgBZ74uLwpI0/edit?usp=sharing
Pour mener à bien ce projet, nous avons opté pour la seconde solution. Nous prévoyons ainsi l'utilisation de trois servomoteurs, dont deux seront dédiés à la manipulation du stylo, tandis que le troisième sera chargé de soulever le stylo. Notre approche implique l'assemblage d'une base, sur laquelle nous fixerons un servomoteur équipé d'un palonnier. Ce dispositif dirigera la première partie de notre robot. Nous fixerons ensuite le palonnier sur le premier bras pour assurer son orientation. Ce bras, conçu de manière extrudée, permettra la fixation d'un second servomoteur, assurant la direction du deuxième bras du robot.Nous avons également besoin d'une extrémité qui servira à porter notre stylo.
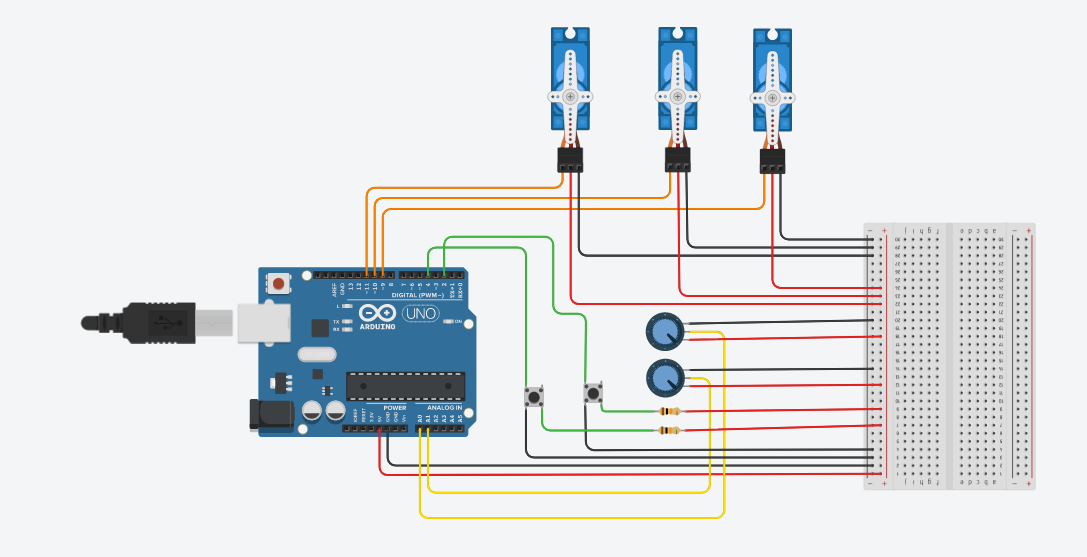
Pour garantir un positionnement précis des servomoteurs, l'intégration d'une carte Arduino est nécessaire. Voici la représentation du circuit électrique :
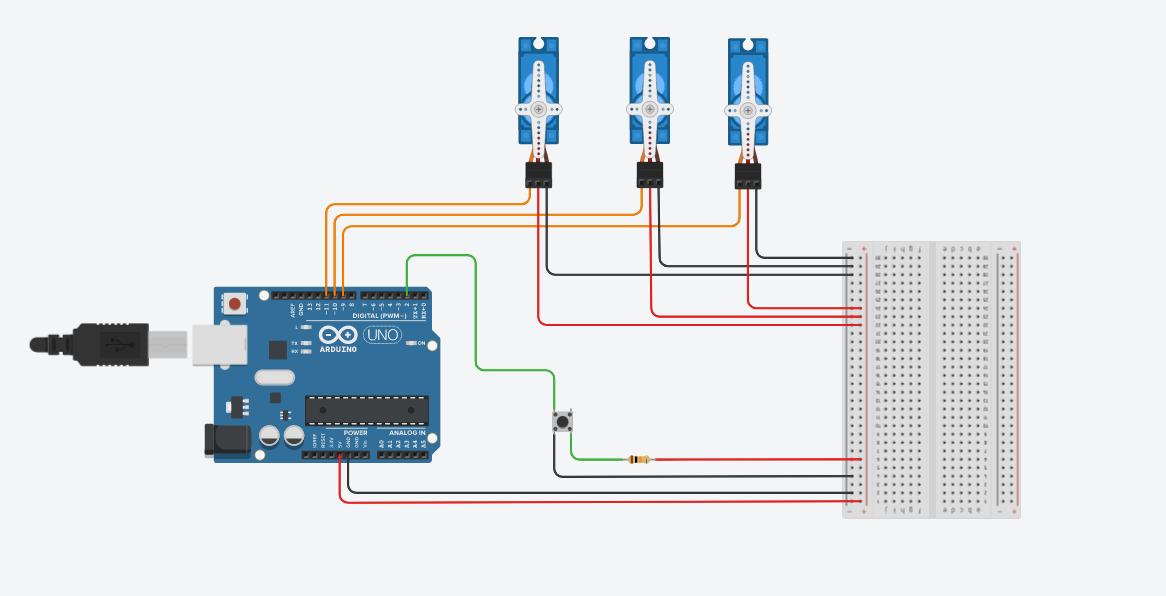
Ce schéma intègre trois servomoteurs et un bouton-poussoir, destiné à basculer entre les modes automatique et manuel. Pour le mode manuel, l'utilisation d'un joystick est requise. En raison de contraintes de représentation, le joystick a été simulé par deux potentiomètres et un bouton-poussoir :