Projet ROB3 : Joshua , Grigor , Dilhan
Présentation du projet
Informations
- NOM PRENOM :
- Hauzay Joshua
- Pelibossian Grigor
- Emir Dilhan
- ROB 3
- adresses mail :
- 7 février 2024 - mai 2024
Contexte
Dans le cadre de l’UE projet robotique
Objectifs
- Concevoir un système robotique :
• Sa partie mécanique
• Son actionnement
• Sa commande
• Son interface de pilotage
2. Savoir s’organiser en mode projet :
• Répartir et synchroniser les tâches
• Suivre l’avancement avec des objectifs intermédiaires
• Fournir la documentation technique
• Respecter un calendrier préétabli
3. Maîtriser le fonctionnement du FabLab
Cahier des charges :
-
Tracer différentes figures prédéfinies dans un carré de 5cm x 5cm, en 10 secondes.
-
Une ligne droite de 5 cm
-
Une ligne pointillée de 5 cm
-
Un cercle de 2,5cm de rayon
-
Un cercle pointillé de 2,5cm de rayon
-
Reproduire un dessin imposé (mais inconnu à l’avance) à l’aide d’un joystick dans un carré de 5cm x 5cm
-
Contrôle au moyen d’un joystick
Matériel :
Voici la liste du matériel donné (imposé) par nos responsables de projet :
- Un crayon
- Interface de commande :
- Une carte arduino UNO avec câble USB-B;
- Un joystick:
- Une platine de protoypage;
- Alimentation régulée 5V ;
- Câbles, LEDs, boutons poussoirs, résistances.
- Motorisation :
- Deux servomoteurs HS422 180°;
- Un servomoteur Emax ES08A 180°.
- Mécanique :
- Matière PLA pour impression 3D;
- Feuilles medium : 3mm et 6mm d'épaisseur;
- Vis et écrous : M2, M2.5, M3, M4.
- Roulements et axes de diamètre 4mm.
- Ressources CAO.zip contient les fichiers Solidworks pour les deux modèles de servomoteurs téléchargeable via le lien suivant : https://wiki.fablab.sorbonne-universite.fr/BookStack/link/1279#bkmrk-ressources-cao.zip-c
- datashetts.zip contient les documentations de quelques-uns des composants fourni téléchargeable via le lien suivant : https://wiki.fablab.sorbonne-universite.fr/BookStack/link/1279#bkmrk-ressources-cao.zip-c
Présentation des différentes solutions envisagées :
Première solution :
Notre première solution consistait en un robot constitué d'un servomoteur à la base en rotation autour de Z et de 2 servomoteurs sur le bras en rotation autour de Y
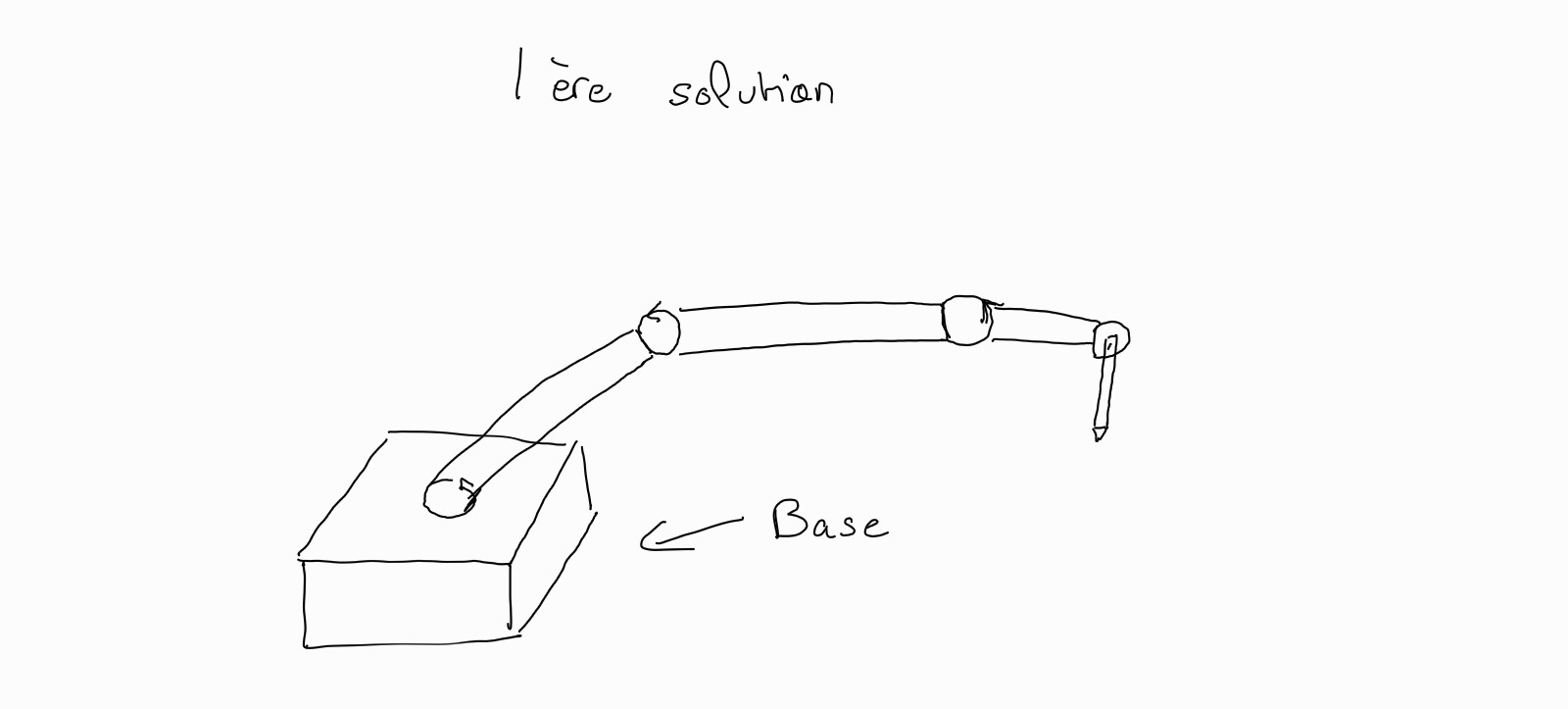
Cette solution est la première auquel nous avons pensé. Elle s'inspire très fortement du FANUC que nous avons pu manipuler lors de notre TP en Robotique expérimentale au 1er semestre.
Cependant, nous l'avons très vite abandonné car le robot n'était pas capable d'effectuer les mouvements nécessaires à la création d'un dessin (en plus d'être éventuellement trop lourd au bout du bras).
Deuxième Solution :
Comme deuxième solution, nous avons pensé à un robot à 2 degré de liberté constitué de 2 servomoteurs en rotation selon Z dont un à la base et l'autre au centre du bras, et d'un servomoteur en rotation selon Y pour contrôler la pose du feutre sur la feuille de dessin.

Cette solution possède de nombreux avantages, tels que la facilité de conception, de production et de calcul de position (le problème à résoudre n'est que plan dans ce cas).
Cependant, la précision de ce bras articulé est inférieure comparé notamment à la solution suivante.
Troisième solution :
La troisième solution consiste à créer un pignon crémaillère afin d'effectuer des déplacements directement selon les axes x, y et z.
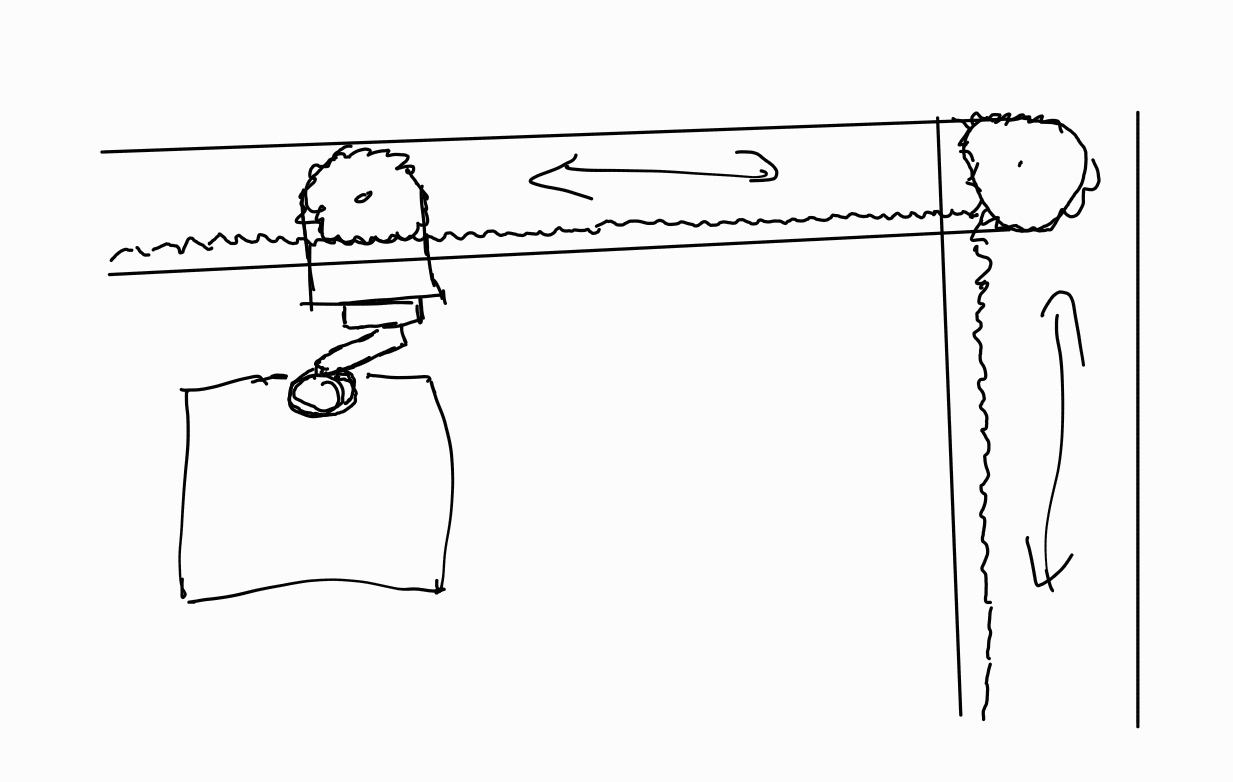
Cette solution possède plusieurs avantages tels qu'une précision accru par rapport à la solution précédente, ainsi qu'un paramétrage des mouvements simplifié.
Cette solution possède cependant d'autres inconvénients par rapport à la deuxième solution, tels que des frottements élevés risquant d'abimer les composants ou encore un calcul du modèle géométrique inverse plus compliqué (les rotations sont convertis en translation).
Solution retenue :
Pour mener à bien ce projet, nous avons opté pour la seconde solution. Nous prévoyons ainsi l'utilisation de trois servomoteurs, dont deux seront dédiés à la manipulation du stylo, tandis que le troisième sera chargé de soulever le stylo. Notre approche implique l'assemblage d'une base, sur laquelle nous fixerons un servomoteur équipé d'un palonnier. Ce dispositif dirigera la première partie de notre robot. Nous fixerons ensuite le palonnier sur le premier bras pour assurer son orientation. Ce bras, conçu de manière extrudée, permettra la fixation d'un second servomoteur, assurant la direction du deuxième bras du robot. Nous avons également besoin d'une extrémité qui servira à porter notre stylo.
GANTT:
https://docs.google.com/spreadsheets/d/1rBMSOXjBwbDXSA9WxZV4CNlc4wGikqxUgBZ74uLwpI0/edit?usp=sharing
Calcul mécanique :
Modèle géométrique inverse :
D'après le cours, le modèle géométrique inverse vaut :
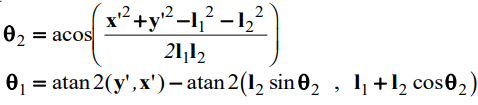
Atan2 est une fonction mathématique très utilisé et comprise par le code Arduino.
Calcul des vitesses angulaires en fonction des vitesses Vx et Vy :
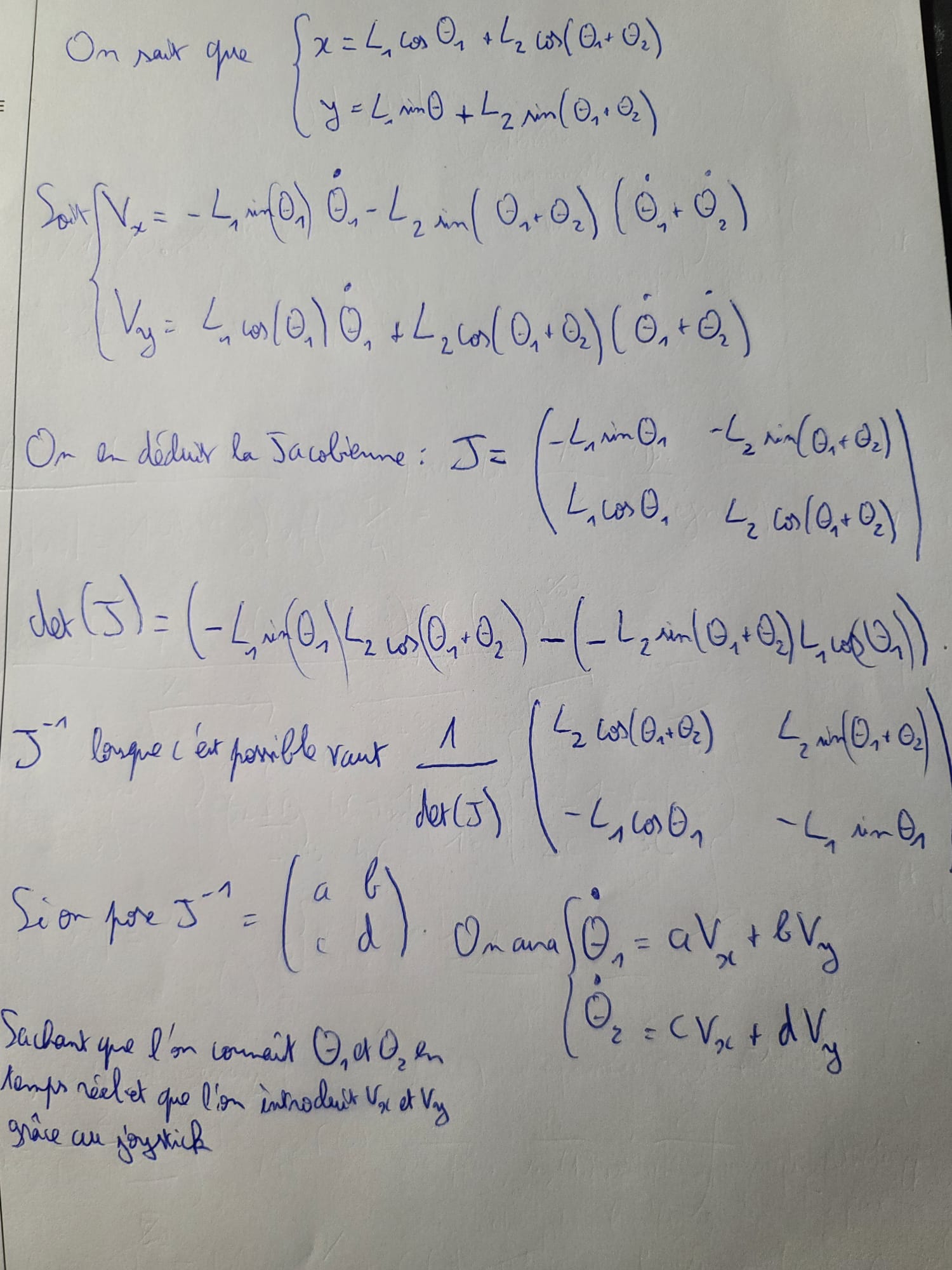
Schéma électronique :
Pour garantir un positionnement précis des servomoteurs, l'intégration d'une carte Arduino est nécessaire. Voici la représentation du circuit électrique :
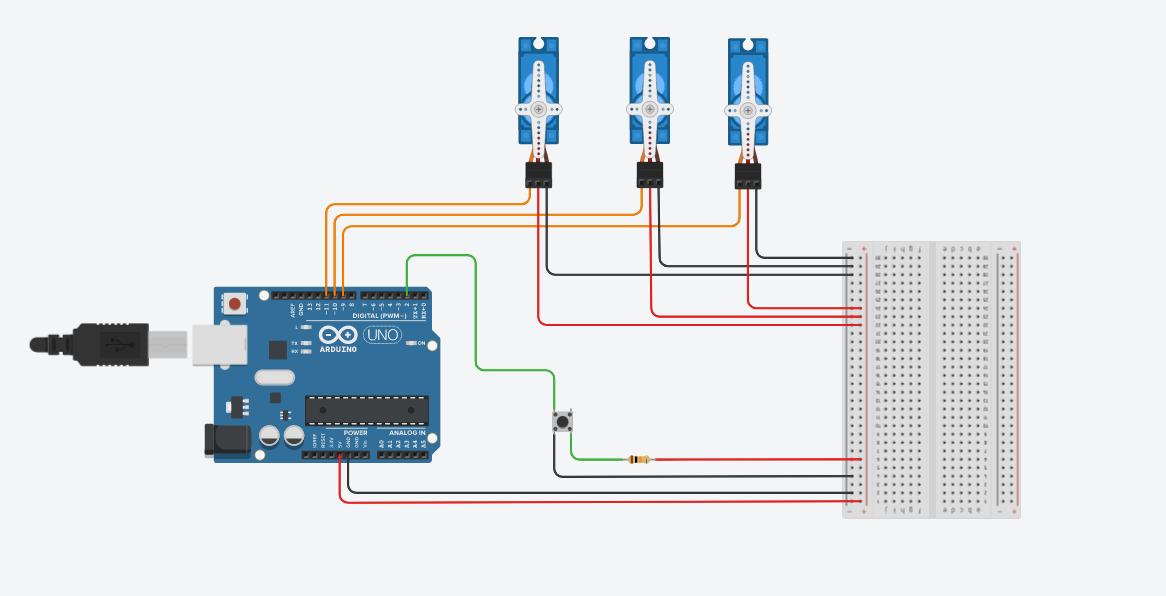
Ce schéma intègre trois servomoteurs et un bouton-poussoir, destiné à basculer entre les modes automatique et manuel. Pour le mode manuel, l'utilisation d'un joystick est requise. En raison de contraintes de représentation, le joystick a été simulé par deux potentiomètres et un bouton-poussoir :
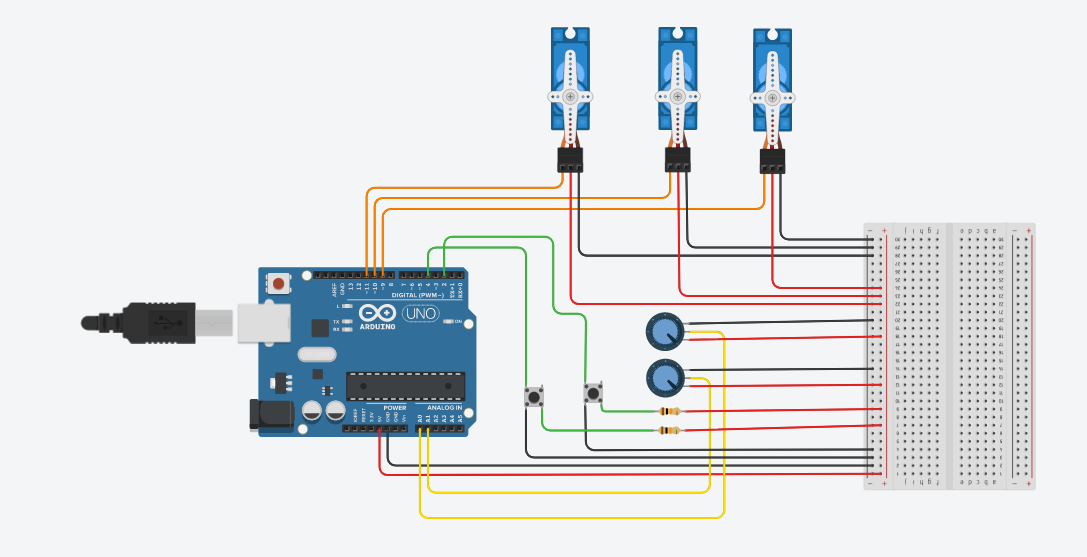
Nous avons décidé de rajouter aussi 2 LEDs afin de montrer le mode de fonctionnement dans lequel le robot est (manuel ou automatique) :
