Projet ROB3 : Mathys CLAUDEL, Sarah EL ZEGHENDY, Romain DARDE
Projet ROB3 S6
ROBOT ÉCRIVAIN
Informations
- Mathys CLAUDEL
- mathysclaudel@gmail.com
- Sarah EL ZEGHENDY
- sarah.el_zeghendy@etu.sorbonne-universite.fr
- Romain DARDE
- romaindarde.rd@gmail.com
- Date de début : 08/02/2024 - Date de fin : 02/05/2024
Contexte
Nous disposons des différentes machines présentent au Fablab, avec une boîte de matériels bien précis et limité. Nous devrons répondre au cahier de charge imposé (https://wiki.fablab.sorbonne-universite.fr/BookStack/books/projets-due-2023-2024/page/le-sujet-du-projet) et faire toutes les étapes nécessaires pour obtenir un système robotisé.
Objectifs
L’objectif principal de ce projet est de concevoir et réaliser un système robotique, c’est-à-dire sa partie mécanique, sa motorisation, sa commande et son interface de pilotage. Le cahier des charges fourni précise les fonctions que doit réaliser le système et les contraintes qu’il doit respecter.
I. Cahier des charges:
Le robot doit être capable de réaliser deux exercices :
-
1) Tracer, avec l’aide d’un crayon fixé sur l’organe terminal du robot, dans le plan de la plaque support différentes figures imposées de difficulté croissante :
a. Une ligne de 5cm de long,
b. Une ligne pointillée de 5cm de long,
c. Un cercle de 2.5cm de rayon,
d. Un cercle pointillé de 2.5cm de rayon.
Le tracé de chacune des figures doit être réalisé en 10 secondes +/- 0.2 secondes.
-
2) Tracer, avec l’aide d’un crayon fixé sur l’organe terminal du robot, dans le plan de la plaque support, un dessin imposé dans un carré de 5cm par 5cm. Le déplacement de l’organe terminal du robot devra être piloté par un joystick. Il est possible que la figure soit discontinue, et donc il faut prévoir de pouvoir relever le crayon du support horizontal sur lequel on écrit.
II. Matériels:
- Un crayon
- Interface de commande :
- Une carte arduino UNO avec câble USB-B;
- Un joystick:
- Une platine de protoypage;
- Alimentation régulée 5V ;
- Câbles, LEDs, boutons poussoirs, résistances.
- Motorisation :
- Deux servomoteurs HS422 180°;
- Un servomoteur Emax ES08A 180°.
- Mécanique :
- Matière PLA pour impression 3D;
- Feuilles medium : 3mm et 6mm d'épaisseur;
- Vis et écrous : M2, M2.5, M3, M4.
- Roulements et axes de diamètre 4mm.
III. Machines utilisées:
- Découpe laser
Solutions proposées
Voici nos trois solutions proposées:
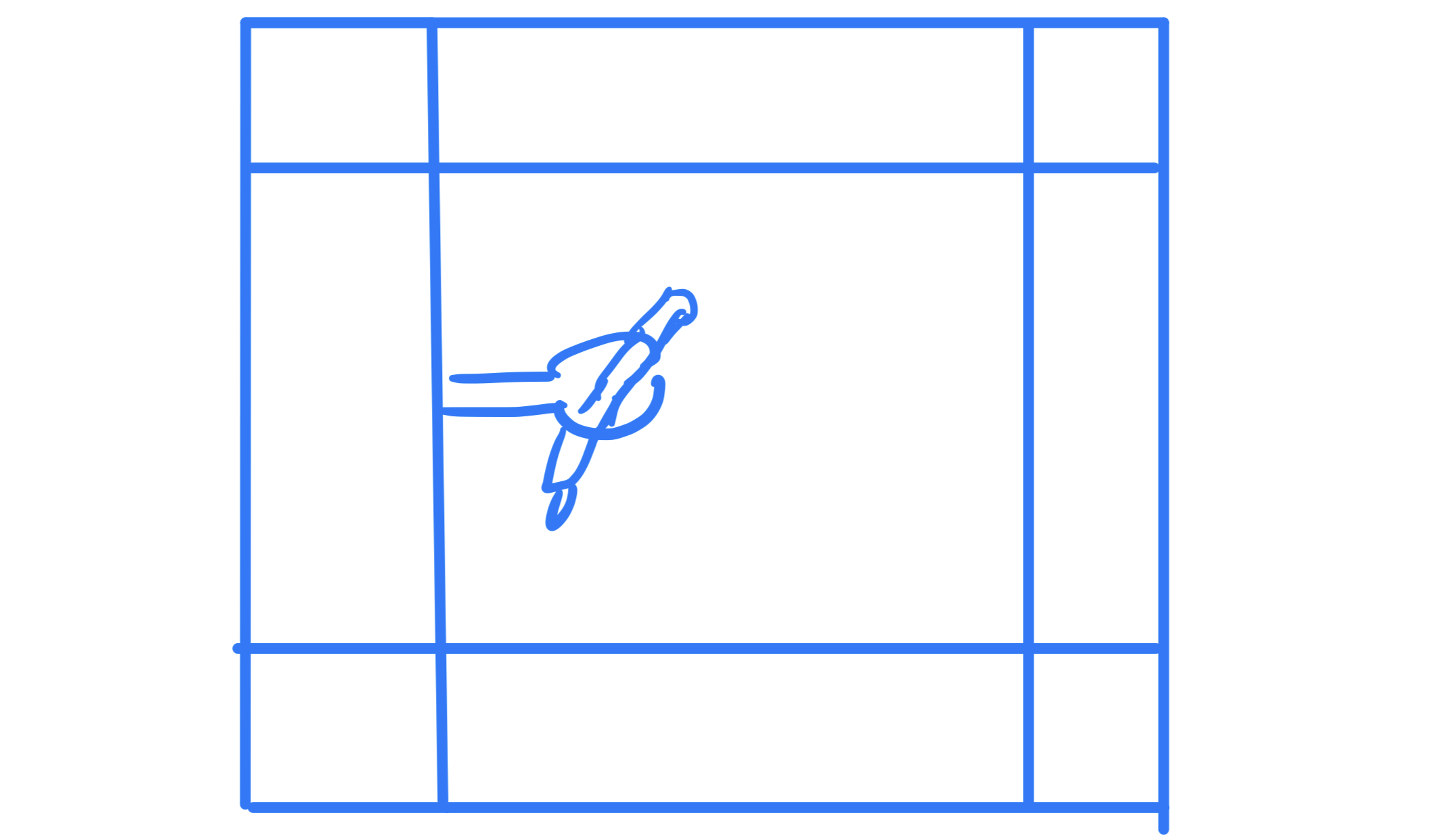
Première solution: Nous avons tout d'abord pensé à un système robotisé qui a le même mode de fonctionnement qu'une machine 3D.
Schéma : PAS TRES CLAIR : SOIT VOUS DESSINEZ DES PROJECTIONS, SOIT VOUS DESSINEZ EN PERSPECTIVE. PAS LES DEUX EN MM TEMPS
Risques :
- Beaucoup de matériels et matières nécessaires à la conception
- Complexité élevée
- Taille du robot importante
Deuxième solution: C'est un robot mobile, qui se déplace en transportant notre stylos pour effectuer le dessin demandé. JE NE COMPRENDS PAS CE DESSIN
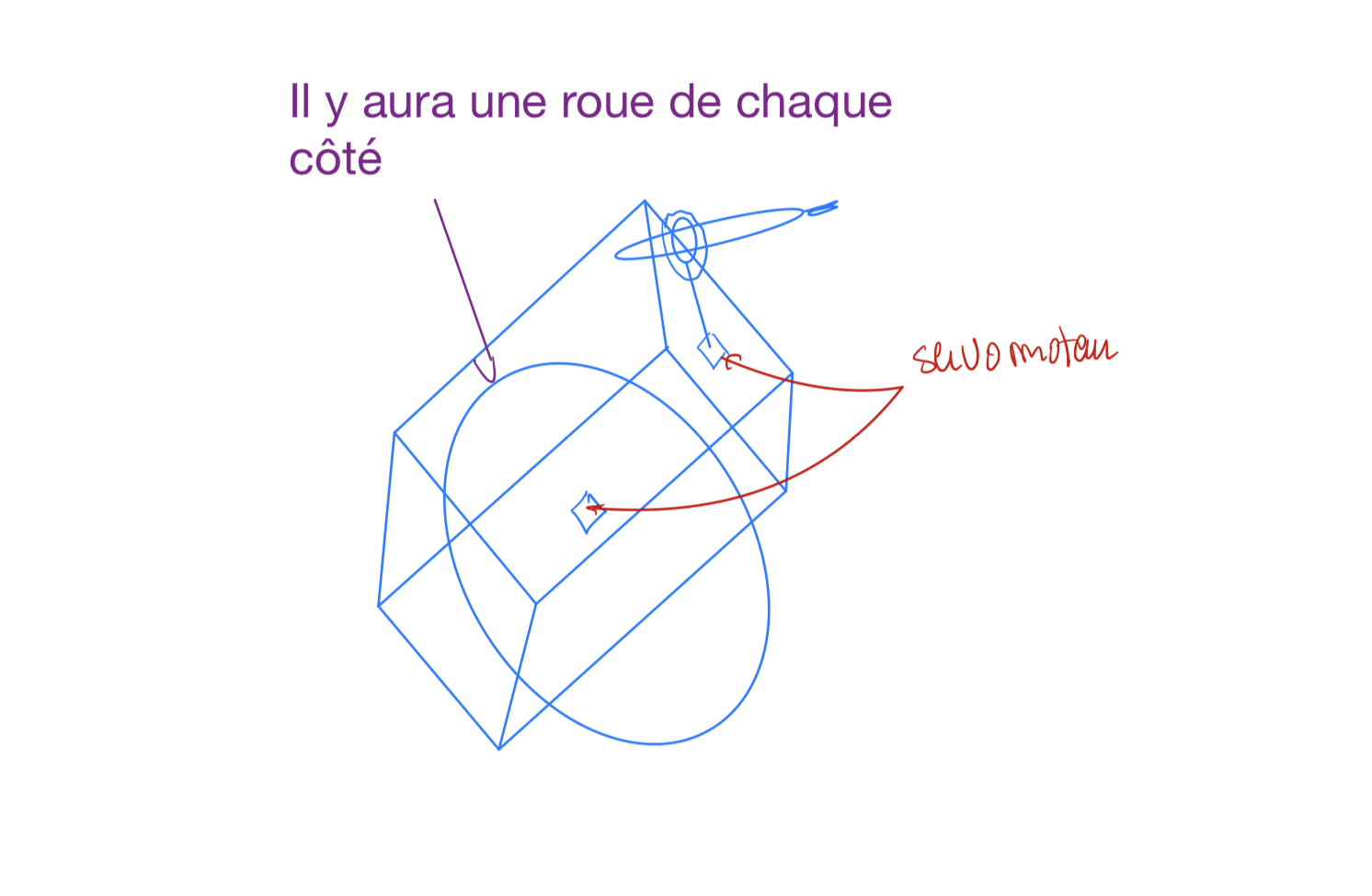
Risques :
- Précision faible
- Connaissance de la position du robot à chaque instant
- Les servos moteurs fournis ne sont pas adaptés
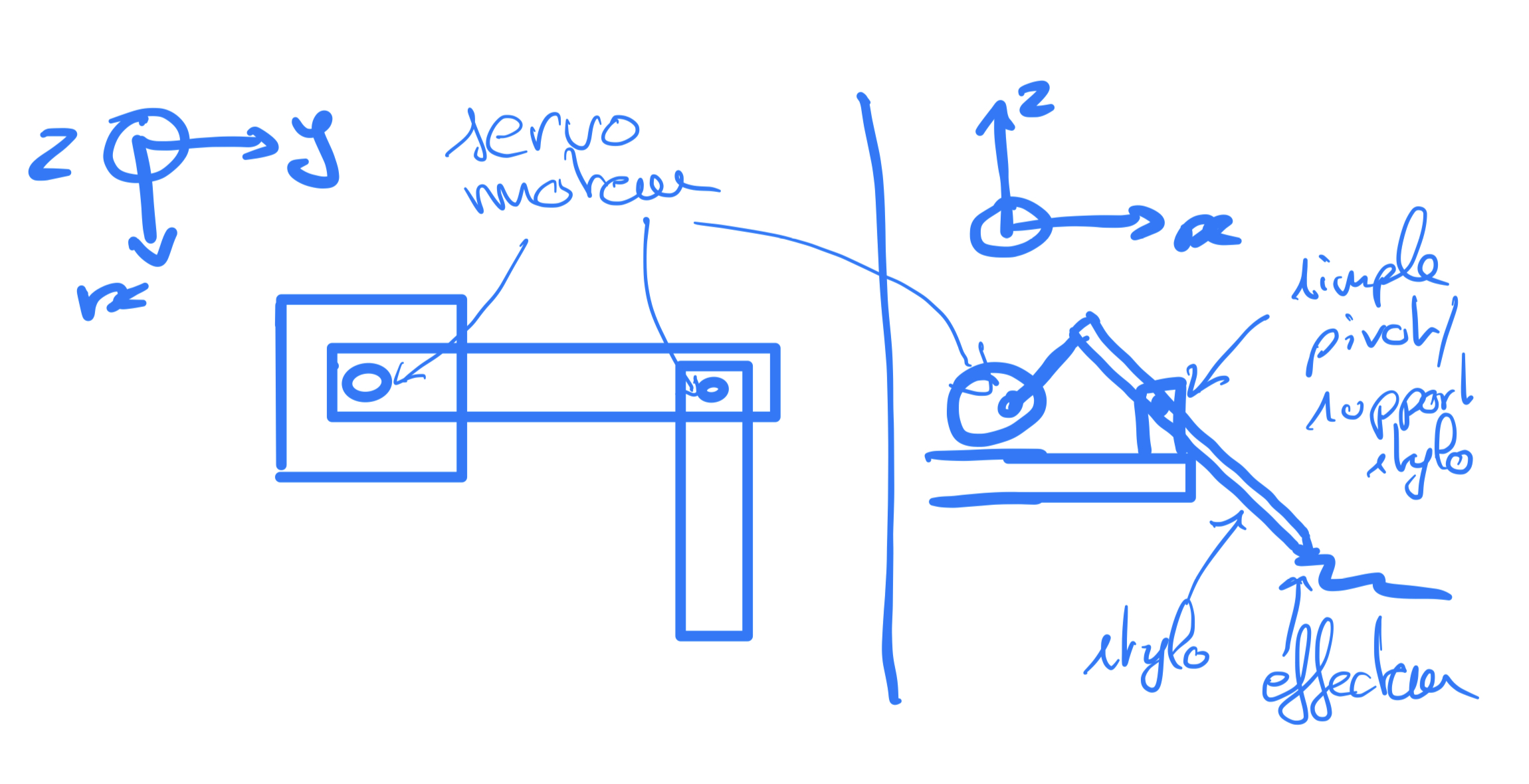
Troisième solution: Nous avons choisi de faire une base fixe avec un bras robotique horizontale auquel s'attache au bout notre effecteur : la pointe du stylo. PRECISER QUE Z EST L'AXE VERTICAL ET QUE LE DESSIN REPRESENTE LE PLAN HORIZONTAL ET LE PLAN VERTICAL
Solution Choisie
Nous avons opté pour la troisième solution, qui nous paraît la plus accessible en terme de temps et de complexité.
En effet, la première solution demandais une conception d'un système comportant des pièces complexes et en grands nombres afin de réaliser les différentes translations voulues sans pour autant nous garantir une précision et une fiabilité élevée. De plus, cette solution aurait nécessité du matériel en plus de ce qui était fourni, nous avons donc décidé de l'éliminer.
D'autre part, le robot mobile qui nous paraissait comme une bonne idée, ne nous permettra pas de savoir la position exacte de notre stylo. Nous aurions dû utiliser des moteurs continus à la place des servomoteurs. Portant, même avec ça, la stabilité (le glissement) du robot lors du déplacement n'aurait pas été garantie.
De ce fait, nous avons choisi la troisième solution qui certes demandera de nombreux calculs (changements de base, articulations...). Cependant, ayant déjà réalisé des calculs similaires durant nos cours, nous partons avec une longueur d'avance et donc du temps gagné pour l'optimisation de notre robot. Bien qu'il nous faudra être rigoureux afin de ne pas mettre notre robot dans des positions de singularité auquel cas ce dernier sera bloqué.
Mode fonctionnel du Robot
....
GANTT
CE LIEN NE MARCHE PAS. METTRE LE GANTT SUR LA PAGE DIRECTEMENT
https://docs.google.com/spreadsheets/d/1Xe_iDD4dc1smNn-Vgg37fMGGTAvD60Nrvi4dP1Dnufg/edit?usp=sharing
Journal de bord
Avancée du projet à chaque étape, difficultés rencontrées, modifications et adaptations (facultatif pour les petits projets)
08/02/2024
Décision de la première version du robot.